A Different Phase-Based Improved Performance of Differential
Microphone Array
Quan Trong The
a
Digital Agriculture Cooperative, No. 15 Lane 2, Tho Thap, Dich Vong, Cau Giay, Hanoi, Viet Nam
Keywords:
Microphone Array, Different Phase, Differential Microphone Array, Dual-System, Speech Enhancement,
Noise Reduction, Background Noise.
Abstract:
Various speech applications such as speech separation, speech recognition, communication, teleconference,
hearing aids common use microphone array (MA) as front-end speech enhancement structure. By using the
spatial information, geometry of MA, the characteristic of recording environment, MA help overcome of
single-channel algorithm to suppress noise without speech distortion. A critical major component of MA
system is the beamforming technique, which forms beampattern to a certain target directional sound source
while alleviating different noise. Differential Microphone Array (DIF) is one of the most popular structure
is used in several speech application. DIF has a lot of advantages which own the capability of null-steering
beampattern to the noise source. In this article, the author proposes a method to enhance performance of DIF
for separating speaker in real dialogue conference. Experiment was illustrated in real situation and obtained
results show the effectiveness of the suggested method in comparison with the previous author’s work.
1 INTRODUCTION
In several speech communication systems, separation
target directional speaker of a mixture of interference,
noise and third-party speaker is a challenging prob-
lem especially in situation with complex surround-
ing noise and low SNR (signal-to-noise ratio) values.
In general, due to the above reason, the speech qual-
ity and speech intelligibility are often significant de-
graded. The necessary of communication is need to
improve speech enhancement, even in scenario of low
SNR is an importance research. Single-channel ap-
proach can’t adapt all requirement, because of it uses
spectral subtraction method, which lead to speech dis-
tortion of the final output. Therefore, MA technology
has been developed for dealing this problem. Nowa-
days, MA is used in almost speech applications, such
as speech recognition, mobile device, hearing aid,
teleconference, human-machine interface in order to
obtain an acceptable degree of speech quality from
any algorithms trying to mitigate background noise
and extracting desired speech. MA exploits the spa-
tial diversity, the priori of knowledge of the direction-
of-arrival (DOA), the properties of acoustic situation,
the characteristic of noise field to achieve a beampat-
a
https://orcid.org/0000-0002-2456-9598
Figure 1: The complicated task of separating desired speech
source.
tern, which toward speech source and remove all of
noise.
Because of possibly changing recording scenario
and varying position of the noise source relative to
MA, DIF beamformer allows null-steering beampat-
tern to noise. In the previous work, the author sug-
gested an additive equalizer for enhancing separation
34
The, Q.
A Different Phase-Based Improved Performance of Differential Microphone Array.
DOI: 10.5220/0012009300003561
In Proceedings of the 5th Workshop for Young Scientists in Computer Science and Software Engineer ing (CSSE@SW 2022), pages 34-40
ISBN: 978-989-758-653-8; ISSN: 2975-9471
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
Figure 2: The advantage of utilizing the MA beamforming.
each talker when using DIF.
G. W. Elko (Elko, 1997, 2000; Teutsch and Elko,
2001) formed a cardioid beampattern when combined
signal with compact spaced microphones. Therefore,
the directivity index of MA was increased.
The designing with small arrays and an appro-
priate geometry and associated beamforming algo-
rithms, which can pass all through bandpass speech
signals still a challenging problem to the scholars
(Barfuss et al., 2017a,b). Among different several
types of MA, DMA is the most suitable architecture
to measure differential of the sound target desired
speech , and more appropriate for achieving high di-
versity, high noise reduction, high directivity index
and invariant-frequency beampattern toward the di-
rection of talker (De Sena et al., 2012; Buck, 2002).
Recently, many efforts are successful with flexible
differential beamforming and robustness of DIF’s per-
formance are enhanced (Huang et al., 2020; Benesty
et al., 2019; Cohen et al., 2019).
An essential issue in differential beamforming is
steering flexibility in any direction of signal or noise.
Linear DMAs do not have much flexibility, due to the
beampattern varies with steering angle and the opti-
mum directivity factor occurs only in end-fire case
DMA. A numerous works are attempted to improv-
ing the flexibility of steering DMA’s beampattern. In
(Elko and Pong, 1997; Derkx and Janse, 2009), a
two-dimensions MA are utilized to steer the result-
ing beampattern in a certain number of directions.
First-order steerable DMAs (Wu et al., 2014; Wu and
Chen, 2016) are evaluated to construct a combina-
tion of monopole and dipoles using 4 microphones
square array. In (Benesty et al., 2015), uniform circu-
lar DMAs were performed to steering beampattern to
some wanted directions. Bernardini et al. (Bernar-
dini et al., 2017) suggested using DMA to steer
second-order with monopole and dipole. In (Huang
et al., 2017), a beamforming technique was evalu-
ated to design an approximately constant beampat-
tern, and has capable to steer between two directions
of the reference beams. In (Parra, 2005, 2006), a de-
signed method was suggested for forming invariant-
frequency beampattern for spherical array. In (Lai
et al., 2013), a broadband beampattern was presented
with arbitrary geometry of microphones for spherical
MA.
With a great obtained progress in designing steer-
able DMA’s beampattern with high directivity index,
good noise reduction, more robustness, and high ca-
pability of steering beampattern.
In this paper, the author continues to deal the
problem of separating talker when using the subspace
technique to reduce the remaining speech component
non-target talker at the output DIF beamformer.
The rest of this paper is organized as follow. The
next section presents model signal, advantage of DIF
and the previous author’s work. Section 3 introduce
how to use the information about phase error between
two microphones to form a post-filtering, which based
on Wiener filter. Section 4 described experiments
with two speakers, and a comparison between the pro-
posed method and the previous work. Concluding re-
mark and future work is presented in Section 5.
2 DIFFERENTIAL MICROPHONE
ARRAY
We will consider the DMA2’s working in STFT do-
main. DMA2 allows obtaining high diversity, noise
reduction, directional beampattern to target speech.
DMA2 have super directivity, small size and can
null-steering beampattern to the direction of noise,
which makes it possible to achieve high performance,
even in reverberation, noisy environment, and suitable
for almost acoustic equipment. The obtained effec-
tiveness of DMA2 is suppressing complicated back-
ground noise and extracting the target speaker.
The representation of two noisy microphone ar-
rays X
1
( f ,k),X
2
( f ,k) in the STFT domain as:
X
1
( f ,k) =S( f , k)e
jΦ
s
(1)
X
2
( f ,k) =S( f , k)e
− jΦ
s
(2)
where f ,k is the index of frequency and current con-
sidered frame, Φ
s
= π f τ
0
cos(θ
s
),τ
0
= d/c,d is the
distance of two microphones, c = 343(m/s) is the
speech of sound propagation in the air, Θ is the
direction-of-arrival (DOA) of useful speech.
With a certain delay τ is added, we can obtain high
directivity beampattern toward two speakers. The
output signals, which are based on subtraction signal
A Different Phase-Based Improved Performance of Differential Microphone Array
35
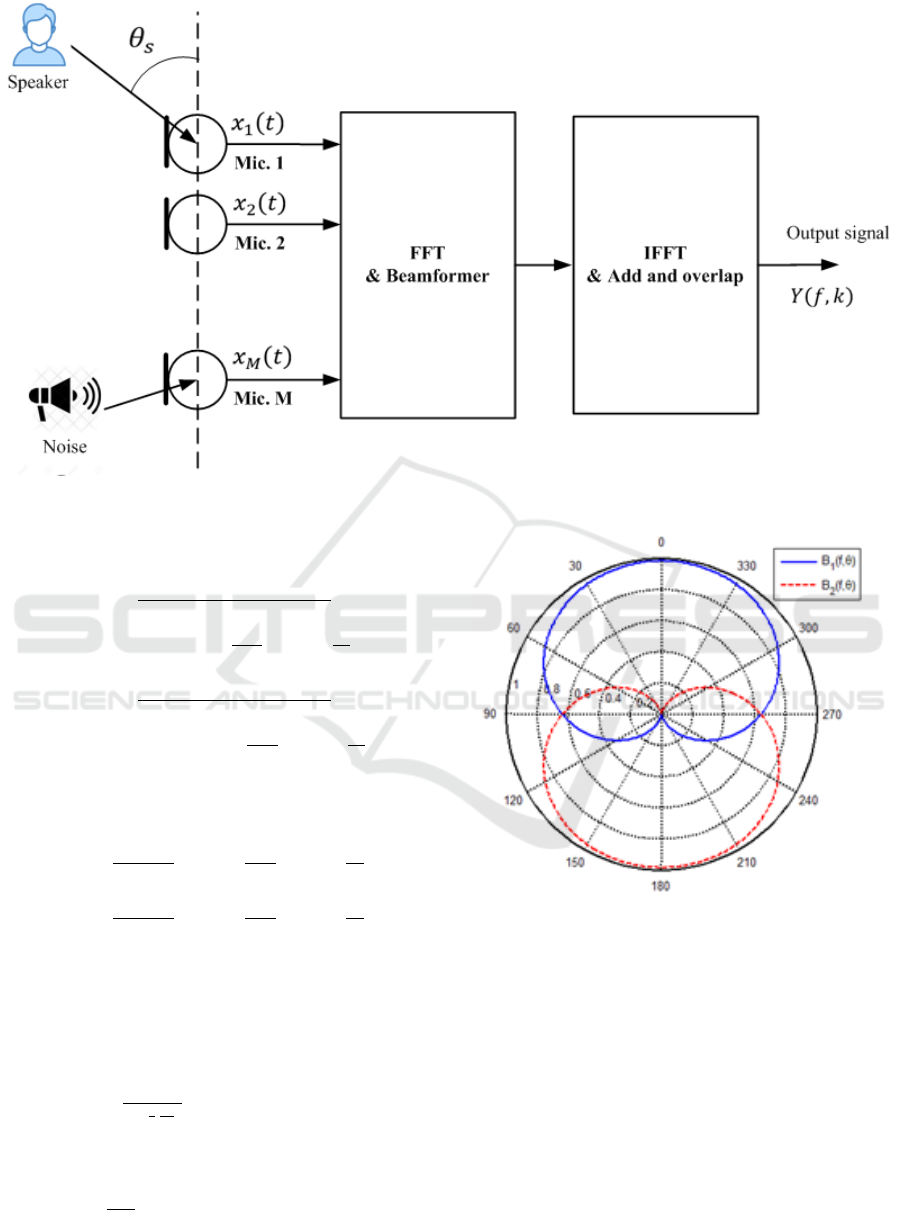
Figure 3: The MA signal processing in the frequency domain.
can be expressed as:
Y
1DIF
( f ,k) =
X
1
( f ,k) − X
2
( f ,k)e
− jωτ
2
(3)
= jS( f , k)sin(
ωτ
0
2
(cosθ +
τ
τ
0
)) (4)
Y
2DIF
( f ,k) =
X
2
( f ,k) − X
1
( f ,k)e
− jωτ
2
(5)
= − jS( f , k)sin(
ωτ
0
2
(cosθ −
τ
τ
0
)) (6)
The directional two beampatterns, which received
from equation (3) - (6) are derived as:
B
1
( f ,θ) =|
Y
1
( f ,k)
S( f , k)
| = |sin(
ωτ
0
2
(cosθ +
τ
τ
0
))| (7)
B
2
( f ,θ) =|
Y
2
( f ,k)
S( f , k)
| = |sin(
ωτ
0
2
(cosθ −
τ
τ
0
))| (8)
Stolbov et al. (Stolbov et al., 2018) proposed uti-
lizing an equalizer for preserving the useful signal at
the low-frequency band. The equalizer can be ex-
pressed as the following equation:
H
eq
( f ) =
6 0 Hz < f ≤ 200 (Hz)
1
sin(
π
2
f
Fc
)
200 Hz < f ≤ Fc
1 Fc < f ≤ 2*Fc
0 2*Fc < f
(9)
where Fc =
1
4∗τ
0
. A constant threshold 12(dB) is de-
termined for H
e
q( f ). The final output signals are:
Figure 4: The beampatterns.
Y
1
( f ,k) =Y
1DIF
( f ,k) ∗ H
eq
( f ) (10)
Y
2
( f ,k) =Y
2DIF
( f ,k) ∗ H
eq
( f ) (11)
In many realistic scenario, the remaining noisy
component at the output signal often deteriorate the
speech quality of DIF beamformer. In the next sec-
tion, the author show an additive post-filtering, which
based on the priori information of DMA2.
CSSE@SW 2022 - 5th Workshop for Young Scientists in Computer Science Software Engineering
36
3 THE POST-FILTERING
An additive post-filtering, which based on the sub-
space technique is presented in figure 5.
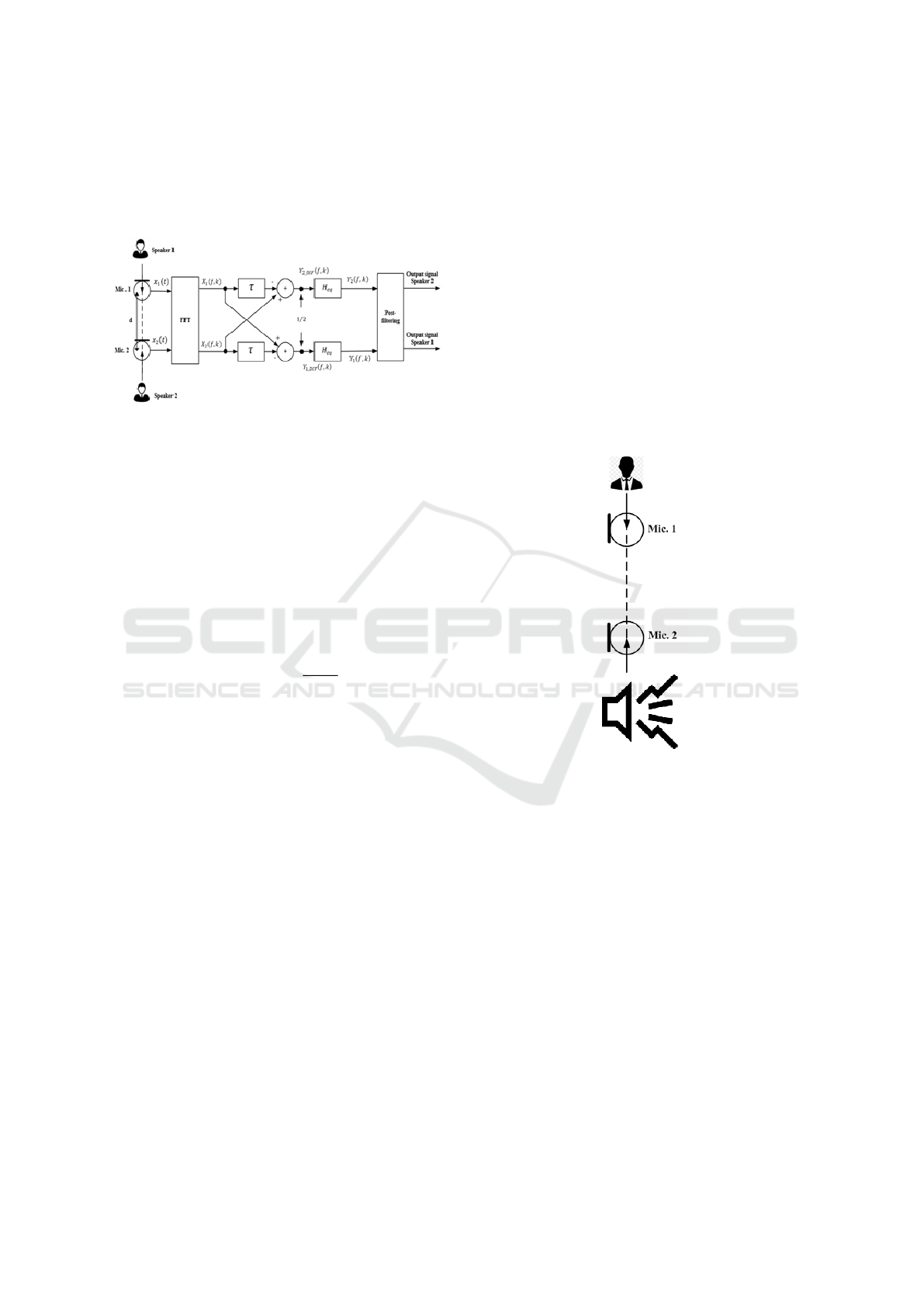
Figure 5: The suggested post-filtering for DMA2 to sepa-
rate useful signal.
In the STFT-domain, with the assumption as the
noise magnitudes are equal for two microphones. The
different phase θ
k
( f ) is defined as:
θ
k
( f ) = arg(X
1
( f ,k)) − arg(X
2
( f ,k)) − 2π f τ
0
(12)
A major information that the different phase is al-
ways in range [−π..π]. In the frames, which contain
the speech component, θ
k
( f ) tends to 0 and in the
noisy frame, θ
k
( f ) tends to π or π.
The author proposed a post-filtering, which use
the a priori information θ
k
( f ) as:
PF( f ) = cos
θ
k
( f )
2
(13)
At the frames, in which the desired target speaker
exits, PF( f ) equal approximately 1 and will save the
speech component. Thus in, at the other noisy frames,
PF( f ) close to 0 and remove the interference or back-
ground noise.
At the final, the received output signal are deter-
mined as:
Y
1out
( f ,k) =Y
1
( f ,k) ∗ PF( f ) (14)
Y
2out
( f ,k) =Y
2
( f ,k) ∗ PF( f ) (15)
In the next section, the author illustrated and ex-
periment to very the useful of the proposed post-
filtering in compared with the previous author’s work
(Stolbov et al., 2018) by using a DMA2 to extract
the desired target talker while suppressing the inter-
ference.
4 EXPERIMENTS AND
DISCUSSION
The purpose of this experiment is enhancing the per-
formance, which based on the DIF beamformer. The
derived problem is alleviating the second talker’s
component while preserving target directional first
talker. A degree of suppression second speaker’s
speech component is calculated to confirm the
promising results. The scheme of experiment is de-
picted in figure 6. DMA2 with the inter-microphone
distance is d = 5(cm). The desired speaker talk while
the interference at the other opposite direction.
For calculating the spectral power density, some
parameters were used for transformed into STFT do-
main: Hamming window, NFFT=512, overlap 50%,
the sampling frequency Fs = 16kHz, smoothing pa-
rameter α = 0.1. A DMA2 was used for recording
speech from target talker at the direction θ
s
= 0(deg)
in presence of unwanted interference, which stand at
the opposite direction θ
v
= 180(deg).
Figure 6: The evaluated recording scenarios with two
speakers.
The waveform of the received signal was illus-
trated in figure 7.
In figure 8, the obtained processed signal by the
previous author’s work (Stolbov et al., 2018) and the
proposed method are illustrated in figure 9.
From these figures, as we can see that, the remain-
ing of speech component of the second talker is re-
moved to 5(dB) in comparison with (Stolbov et al.,
2018). The effectiveness of the proposed technique
was confirmed in suppressing the remaining speech
component of second talker while ensuring keep the
first second’s speech. This is the major advantage in
comparison with the previous work (Stolbov et al.,
2018).
So in this paper, the author exploits the different
phase approach to forming an additive post-filtering
to enhance the final desired target speaker. As can
be observed, the enhancement of suggested method
A Different Phase-Based Improved Performance of Differential Microphone Array
37
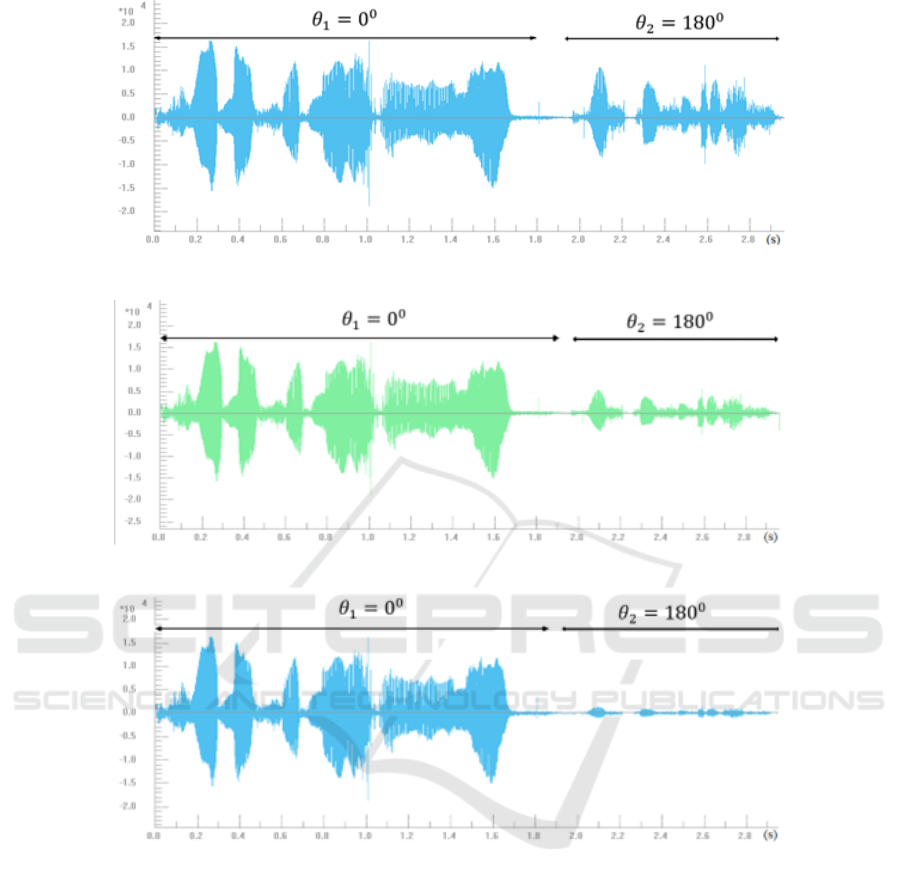
Figure 7: The waveform of the capture microphone array signal.
Figure 8: The processed signal by (Stolbov et al., 2018).
Figure 9: The obtained processed signal by additive post-filtering.
was more significant realized than the work (Stolbov
et al., 2018). This technique can be applied into other
acoustic system.
DMA2 has the capability of impact, low com-
putation, easy implementation. These advantages
make DMA2 is commonly installed in almost acous-
tic equipments; therefore the demand of enhancing of
of high directivity, more robustness still exits. The
author use the available information about difference
phase to improve the previous work.
Separation of target speaker in complex environ-
ment, in which the third-party talker or background
noise existed, still a challenge to all scholars. The
use of the characteristics between two microphones
is the advantage of MA to improve the speech en-
hancement. Different phase is one of the most inter-
esting object for studying to improve the performance
of DMA2.
5 CONCLUSION
MA beamforming are now common installed in var-
ious range of acoustic applications such as cel-
lular phones, teleconferencing, speech recognition,
robotics, smart device, telephone hands-free. A
challenging task is perfectly separating speech each
speaker, which requires using model a suitable DMA.
CSSE@SW 2022 - 5th Workshop for Young Scientists in Computer Science Software Engineering
38

In this paper, the author suggested exploit the charac-
teristic subspace of microphone array signals to im-
prove and increase the robustness of DMA system
than the previous work. A knowledge of the power
target speech source used for post-filtering to suppress
the non-target different speaker without speech distor-
tion of target source. Numerical result was verified in
real scenario and confirm the ability of the proposed
method. Phase error approach can be further studied
in future for installing into multi-microphone system.
In the future, the author will investigate the property
of environment to enhance the performance of MA
algorithms.
ACKNOWLEDGEMENTS
This research was supported supported by Digital
Agriculture Cooperative. The author thank our col-
leagues from Digital Agriculture Cooperative, who
provided insight and expertise that greatly assisted the
research.
REFERENCES
Barfuss, H., Bachmann, M., Buerger, M., Schneider, M.,
and Kellermann, W. (2017a). Design of robust two-
dimensional polynomial beamformers as a convex op-
timization problem with application to robot audi-
tion. In 2017 IEEE Workshop on Applications of Sig-
nal Processing to Audio and Acoustics (WASPAA),
pages 106–110. https://doi.org/10.1109/WASPAA.
2017.8170004.
Barfuss, H., Buerger, M., Podschus, J., and Kellermann, W.
(2017b). HRTF-based two-dimensional robust least-
squares frequency-invariant beamformer design for
robot audition. In 2017 Hands-free Speech Communi-
cations and Microphone Arrays (HSCMA), pages 56–
60. https://doi.org/10.1109/HSCMA.2017.7895561.
Benesty, J., Chen, J., and Cohen, I. (2015). Design of Cir-
cular Differential Microphone Arrays, volume 12 of
Springer Topics in Signal Processing. Springer Cham.
https://doi.org/10.1007/978-3-319-14842-7.
Benesty, J., Cohen, I., and Chen, J. (2019). Array Process-
ing: Kronecker Product Beamforming, volume 18 of
Springer Topics in Signal Processing. Springer Cham.
https://doi.org/10.1007/978-3-030-15600-8.
Bernardini, A., D’Aria, M., Sannino, R., and Sarti, A.
(2017). Efficient Continuous Beam Steering for Pla-
nar Arrays of Differential Microphones. IEEE Signal
Processing Letters, 24(6):794–798. https://doi.org/10.
1109/LSP.2017.2695082.
Buck, M. (2002). Aspects of first-order differential mi-
crophone arrays in the presence of sensor imper-
fections. European Transactions on Telecommuni-
cations, 13(2):115–122. https://doi.org/10.1002/ett.
4460130206.
Cohen, I., Benesty, J., and Chen, J. (2019). Differential
Kronecker Product Beamforming. IEEE/ACM Trans-
actions on Audio, Speech, and Language Processing,
27(5):892–902. https://doi.org/10.1109/TASLP.2019.
2895241.
De Sena, E., Hacihabiboglu, H., and Cvetkovic, Z. (2012).
On the Design and Implementation of Higher Order
Differential Microphones. IEEE Transactions on Au-
dio, Speech, and Language Processing, 20(1):162–
174. https://doi.org/10.1109/TASL.2011.2159204.
Derkx, R. M. M. and Janse, K. (2009). Theoretical Anal-
ysis of a First-Order Azimuth-Steerable Superdirec-
tive Microphone Array. IEEE Transactions on Au-
dio, Speech, and Language Processing, 17(1):150–
162. https://doi.org/10.1109/TASL.2008.2006583.
Elko, G. W. (1997). Adaptive noise cancellation with di-
rectional microphones. In Proceedings of 1997 Work-
shop on Applications of Signal Processing to Audio
and Acoustics, pages 4 pp.–. https://doi.org/10.1109/
ASPAA.1997.625628.
Elko, G. W. (2000). Superdirectional Microphone Ar-
rays. In Gay, S. L. and Benesty, J., editors, Acous-
tic Signal Processing for Telecommunication, vol-
ume 551 of The Springer International Series in En-
gineering and Computer Science, pages 181–237.
Springer US, Boston, MA. https://doi.org/10.1007/
978-1-4419-8644-3
10.
Elko, G. W. and Pong, A.-T. N. (1997). A steerable and
variable first-order differential microphone array. In
1997 IEEE International Conference on Acoustics,
Speech, and Signal Processing, volume 1, pages 223–
226. https://doi.org/10.1109/ICASSP.1997.599609.
Huang, G., Benesty, J., and Chen, J. (2017). On the
Design of Frequency-Invariant Beampatterns With
Uniform Circular Microphone Arrays. IEEE/ACM
Transactions on Audio, Speech, and Language Pro-
cessing, 25(5):1140–1153. https://doi.org/10.1109/
TASLP.2017.2689681.
Huang, G., Chen, J., and Benesty, J. (2020). Design of pla-
nar differential microphone arrays with fractional or-
ders. IEEE/ACM Transactions on Audio, Speech, and
Language Processing, 28:116–130. https://doi.org/10.
1109/TASLP.2019.2949219.
Lai, C. C., Nordholm, S., and Leung, Y. H. (2013). Design
of Steerable Spherical Broadband Beamformers With
Flexible Sensor Configurations. IEEE Transactions on
Audio, Speech, and Language Processing, 21(2):427–
438. https://doi.org/10.1109/TASL.2012.2219527.
Parra, L. C. (2005). Least squares frequency-invariant
beamforming. In IEEE Workshop on Applica-
tions of Signal Processing to Audio and Acous-
tics, 2005., pages 102–105. https://doi.org/10.1109/
ASPAA.2005.1540179.
Parra, L. C. (2006). Steerable frequency-invariant beam-
forming for arbitrary arrays. The Journal of the Acous-
tical Society of America, 119(6):3839–3847. https:
//doi.org/10.1121/1.2197606.
Stolbov, M., Tatarnikova, M., and The, Q. T. (2018).
A Different Phase-Based Improved Performance of Differential Microphone Array
39

Using Dual-Element Microphone Arrays for Auto-
matic Keyword Recognition. In Karpov, A., Jokisch,
O., and Potapova, R., editors, Speech and Com-
puter, volume 11096 of Lecture Notes in Com-
puter Science book series, pages 667–675, Cham.
Springer International Publishing. https://doi.org/10.
1007/978-3-319-99579-3 68.
Teutsch, H. and Elko, G. W. (2001). First- and second order
adaptive differential microphone arrays. In Seventh
International Workshop on Acoustic Echo and Noise
Control, IWAENC 2001, Darmstadt. https://www.
iwaenc.org/proceedings/2001/main/data/teutsch.pdf.
Wu, X. and Chen, H. (2016). Directivity Factors of the
First-Order Steerable Differential Array With Micro-
phone Mismatches: Deterministic and Worst-Case
Analysis. IEEE/ACM Transactions on Audio, Speech,
and Language Processing, 24(2):300–315. https://doi.
org/10.1109/TASLP.2015.2506269.
Wu, X., Chen, H., Zhou, J., and Guo, T. (2014). Study
of the Mainlobe Misorientation of the First-Order
Steerable Differential Array in the Presence of Micro-
phone Gain and Phase Errors. IEEE Signal Processing
Letters, 21(6):667–671. https://doi.org/10.1109/LSP.
2014.2312729.
CSSE@SW 2022 - 5th Workshop for Young Scientists in Computer Science Software Engineering
40
