
An Intelligent Robotic Platform for Conducting Geodetic and Ecological
Surveys of Water Bodies
Andrii Tkachuk
1 a
, Mariia Hrynevych
1 b
, Tetiana A. Vakaliuk
1,2,3 c
, Oksana A. Chernysh
1 d
and Mykhailo G. Medvediev
4 e
1
Zhytomyr Polytechnic State University, 103 Chudnivsyka Str., Zhytomyr, 10005, Ukraine
2
Institute for Digitalisation of Education of the NAES of Ukraine, 9 M. Berlynskoho Str., Kyiv, 04060, Ukraine
3
Kryvyi Rih State Pedagogical University, 54 Gagarin Ave., Kryvyi Rih, 50086, Ukraine
4
ADA University, School of Information Technologies and Engineering, Baku, AZ1008, Azerbaijan
Keywords:
Robotics, Geodesy, Measurement, Acidity, Temperature.
Abstract:
The article considers the relevance of using a new intelligent robotic platform to quickly conduct basic re-
search on water quality assessment in reservoirs and analyze the relief of the reservoir bottom, preserving all
the data. The paper proves that using an intelligent platform for water analysis significantly facilitates the
research. Moreover, it increases the studied area of the reservoir. It simplifies the process of establishing the
correspondence of data to a particular place on the reservoir compared to classical methods of water quality
analysis in the reservoir. It describes the platform’s advanced design, which consists of a housing, a control
board, sensors, actuators such as servo motors and a brushless motor, a radio module, a GPS module, and a
motor speed controller. In addition, it illustrates the cutting-edge platform control panel. The article analyzes
a functional diagram of an intelligent robotic platform for water quality assessment and bottom topography. It
presents the study of the developed system carried out on the reservoir, the main idea of which was to study the
correctness of the system’s operation, evaluate the effectiveness of the conducted studies, and display water
quality sensors. The paper studies an ultrasonic sensor for measuring depth and sensors for water acidity and
temperature. It presents the outcomes of the developed monitoring system experiments that resulted in a map
of the reservoir’s bottom area and certain conclusions on water quality.
1 INTRODUCTION
Modern realities signify a rapid increase in consump-
tion and the amount of waste. Therefore the ques-
tion arises whether new digital technologies can com-
pensate for these changes. The answer is obvious: it
is necessary to look for new solutions that will help
solve the problem of climate change and contribute to
preserving the well-being of the entire planet.
Water pollution is the negative change in the phys-
ical, chemical, and bacteriological water properties
caused by an excess of inorganic substances (solid,
liquid, gaseous), organic, radioactive, or heat, which
limit or prevent the use of water resources for drink-
a
https://orcid.org/0000-0003-2466-6299
b
https://orcid.org/0000-0001-9183-5211
c
https://orcid.org/0000-0001-6825-4697
d
https://orcid.org/0000-0002-2010-200X
e
https://orcid.org/0000-0002-3884-1118
ing and economic purposes.
Natural reservoirs, such as oceans, rivers, and
lakes, can self-purify. However, getting too many pol-
lutants into their system can cause irreversible dam-
age. Therefore, it all depends on the number of pollu-
tants.
Too many chemicals, bacteria, and other microor-
ganisms cause severe water pollution. Chemical, or-
ganic, and mineral substances form colloidal solu-
tions and suspensions. Natural factors determine the
chemical composition of pollutants, for example, the
decomposition of substances in soil and rocks, the de-
velopment and death of aquatic organisms, and an-
thropogenic factors.
Consequently, a robotic platform enables remote
analysis of water in the reservoir to measure the acid-
ity of water, its temperature, and the depth of the
reservoir. In case of acidity increase and water pollu-
tion detection, it will be possible to take a water sam-
ple from a particular reservoir area and carry out a de-
50
Tkachuk, A., Hrynevych, M., Vakaliuk, T., Chernysh, O. and Medvediev, M.
An Intelligent Robotic Platform for Conducting Geodetic and Ecological Surveys of Water Bodies.
DOI: 10.5220/0012009600003561
In Proceedings of the 5th Workshop for Young Scientists in Computer Science and Software Engineering (CSSE@SW 2022), pages 50-56
ISBN: 978-989-758-653-8; ISSN: 2975-9471
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)

tailed water analysis in the ground laboratory. More-
over, the floating platform takes real-time readings
from sensors and follows the executive mechanisms.
Thus, it detects the source of pollution and marks the
exact location by dropping a beacon in the highest
pollution concentration for further investigation of the
nature and pollution level.
Furthermore, the platform is a helpful tool for
training qualified economists and promoting the de-
velopment of environmental consciousness and mo-
tivation for transforming knowledge in behavioral
models.
2 THEORETICAL BACKGROUND
The problem of water pollution is becoming more
significant. Some “mobile” laboratories allow con-
ducting research in field conditions. However, it is
a long-term process that requires detailed preparation
and preliminary water sampling.
There are no absolute analogs of the system pre-
sented.
The automated surface platforms that are fully au-
tonomous or controlled are reviewed in (Dimitropou-
los, 2019; Brans, 2021; Rivero, 2022; Niiler, 2020;
Dr
˘
agan, 2021). Therefore, they are suitable for ex-
treme conditions to research in the ocean or transport
cargo along a specific, established route.
Sea Machines (Sea Machines, 2023) highlight an
autonomous self-piloting system, which allows re-
mote control of the vessel, receives information from
sensors on the user interface, and has a complete pic-
ture of the vessel’s state.
Li et al. (Li et al., 2020) suggested a spectral pro-
cessing method for analyzing the reflectivity of water
samples and applied machine learning methods to es-
timate water quality parameters.
Therefore, the investigation aims to develop an in-
telligent robotic platform for conducting geodetic and
environmental research, which will be easy to man-
age, “mobile”, and fast compared to similar systems.
Moreover, it will also allow us to quickly make sets
of water samples for more accurate and detailed anal-
ysis in the laboratory. In addition, it contributes to
an actual experiment to assess the robotic platform’s
effectiveness and the system’s correctness.
Koval’ (Koval’, 2015), Bezvesilna et al.
(Bezvesilna et al., 2017) describe modern sensors
for measuring acceleration and gravity anomalies.
However, they do not indicate the feasibility of using
them in the design of intelligent robotic platforms.
Various ways to control intelligent robotic plat-
forms are suggested in (Chung et al., 2018; Tedeschi
and Carbone, 2014). An example of a fuzzy neural
network and a Kalman filter to control a mobile robot
is provided. A stabilization algorithm with the ap-
plied close-loop control system, including an inertial
measuring unit as a feedback sensor, is delivered. A
Control system is applied to calculate the engine an-
gles to achieve stability on the inclined surface.
3 RESULTS
3.1 The Structure of the Intelligent
Robotic Platform
Zhytomyr Polytechnic State University scholars have
developed an intelligent robotic platform for geodetic
and environmental research. According to the criteria
of “cost-effectiveness” and mobility, the new system
will be the best among its known analogs. The design
of the robotic platform (figure 1) consists of the fol-
lowing main elements: body; control unit (1), which
includes a microcontroller based on an Arduino Nano
board (2), a radio module (3), a JSN-SR04T-2.0 sen-
sor control board (4), a PH-4502C module to which
a water acidity sensor is connected (5); collectorless
engine (6), its cooling jacket (7), engine regulator (9)
connecting clutch (24) for transferring rotation from
the engine shaft to the deadwood shaft (23), which in
turn is connected to the propeller (22) ); the system is
powered by a battery (8); servomotors (10), (11), (12)
and (13) are used as cargo compartment drives (25)
and (26), steering wheel drive (21) and water intake
mechanism drive; sensors for temperature (14), acid-
ity level (15), ultrasonic for measuring the distance
from the bottom of the platform to the bottom of the
reservoir (16), distance sensor (27); navigation of the
platform is provided by the GPS module (28) and the
antenna (29); overall emitters (17) – (20) help in driv-
ing in the dark.
The platform equipment is powered by a Turnigy
Li-Po 7.4V 5300mAh 2S2P 25C battery, which al-
lows you to use the robotic intelligent platform for
a long time and provides the necessary power supply
voltage for the correct operation of the system. An
Arduino Nano board built on an ATmega328 micro-
controller was chosen as the control device. It is com-
pact and enables all the tasks set in this project. For
remote data transmission and platform control, the
NRF 24L01P+ radio module is used, ensuring good
signal reception and transmission quality at a distance
of up to 1 kilometer. Furthermore, the following sen-
sors receive data about the environment: ultrasonic
distance sensor JSN-SR04T-2.0, which provides mea-
An Intelligent Robotic Platform for Conducting Geodetic and Ecological Surveys of Water Bodies
51
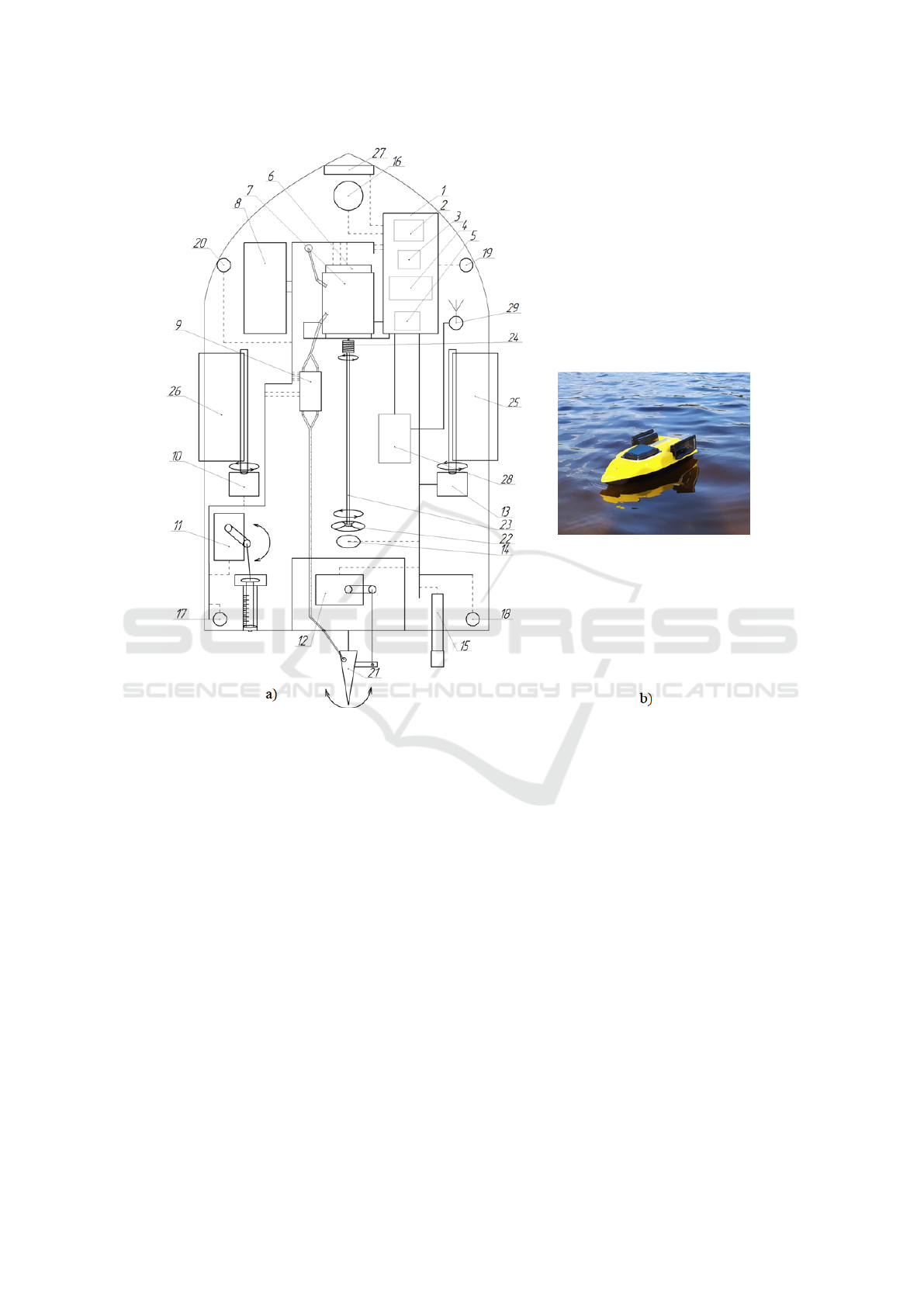
Figure 1: Structural elements of the robotic intelligent platform (a) the robotic platform (b).
surement of the distance from the swimming plat-
form to the bottom of the reservoir and thereby al-
lows displaying a map of the topography of the bot-
tom by constructing a graph based on the data re-
ceived from the sensor, as well as measuring depth
in a specific place of the reservoir and make a pre-
liminary calculation of the water volume of the reser-
voir; the DFRobot ADC151 water acidity sensor is
used to analyse water quality, which helps to explore
and determine the acidity of water almost instantly;
to measure the water temperature, a DS18B20 digi-
tal sensor is used with the function of an alarm sig-
nal for monitoring the temperature and the range of
the measured temperature from 55 to +125 °C; the
Sharp GP2Y0A21YK0F infrared distance sensor was
used to determine floating obstacles that may appear
in the path of the platform; to determine the exact lo-
cation of this system and further build a map of the
bottom and link the received data to exact coordi-
nates, the GPS module GPS NEO-6M SMA + IPEX
and the active antenna ANT GPS BY-GPS-07 SMA-
M were used to increase sensitivity and increase the
ratio “signal-to-noise” and reducing the impact of in-
terference. The executive mechanisms are in the form
of MG995 Tower Pro and MG996R-180 servomotors,
which are necessary to implement the water collection
mechanism for its further in-depth analysis, as well as
to ensure the movement of the swimming platform in
the required direction and to unload the cargo placed
in two cargo compartments on top of the platform.
3.2 Control Panel
We developed the control panel for the platform by
modernizing the existing panel, the structural diagram
of which you can see below.
Control is carried out by the Arduino Nano board,
which provides data processing. Moreover, it per-
forms the control device function and ensures data
processing from the GPS module and their recording
CSSE@SW 2022 - 5th Workshop for Young Scientists in Computer Science Software Engineering
52

Figure 2: Structural diagram of the remote control panel.
on a flash drive.
Sticks are employed to control the platform re-
motely; buttons are used to drive the cargo compart-
ments and activate the water sampling system. LEDs
are used to display the status of the system.
The control panel receives and transmits data via
the NRF 24L01+ radio module. The received sensor
data from the radio module are processed by the con-
trol board and displayed on the OLED display of the
control panel.
3.3 Algorithms of System Operation
For the operation of the robotic intelligent platform, it
is necessary to organize the synchronous operation of
the swimming platform and the remote control (data
reception and transmission). First, according to the
system’s algorithm (figure 3), the controller ports are
configured, and the input data is zeroed. In this case,
the transmitter considers the robotic intelligent plat-
form, i.e., the initiator of the data exchange. Then
a request is sent to the air to connect to the control
panel. If there is no response, a cyclical request to
connect to the control panel is sent again. If there is a
connection and a signal is received, a response occurs
to work on exchanging data with the remote control
and checking the necessity of continuing work. If the
work is finished, the cycle ends. If the system contin-
ues, cyclical work with the remote control takes place
until the work with the remote control is finished.
The control panel operations algorithm (figure 4)
begins with initialization. Then, the remote control
acts as a receiver. Therefore, there is a wait for a free
request on the air to connect to the robotic intelligent
platform. In the absence of active requests, there is
a cyclic wait for a connection request. In the case of
Figure 3: The basic algorithm of the robotic intelligent plat-
form.
a connection and receiving a signal, it is essential to
exchange data with the platform and check the need
to continue work. If the work is finished, the cycle
ends.
3.4 Features of the System
When activating the data recording system for build-
ing a three-dimensional model of the reservoir bot-
tom, the system activation is checked, the GPS mod-
ule and the SD module are launched, and their set-
tings for operation are performed. The GPS module
needs time to connect to satellites and determine its
coordinates. Therefore, determining the coordinates
of the robotic platform location takes time. Then a
file is created to make further recordings of the depth
sensor data and the corresponding coordinates. In ad-
dition, a timer is started, which is set to 10 minutes
by default. During this time, the data will be recorded
in the created file. Next, the coordinates and depth
are cyclically read. Finally, this data is written to a
file with an interval of 30 seconds during the time set
by the timer. This data file is the basis for construct-
An Intelligent Robotic Platform for Conducting Geodetic and Ecological Surveys of Water Bodies
53
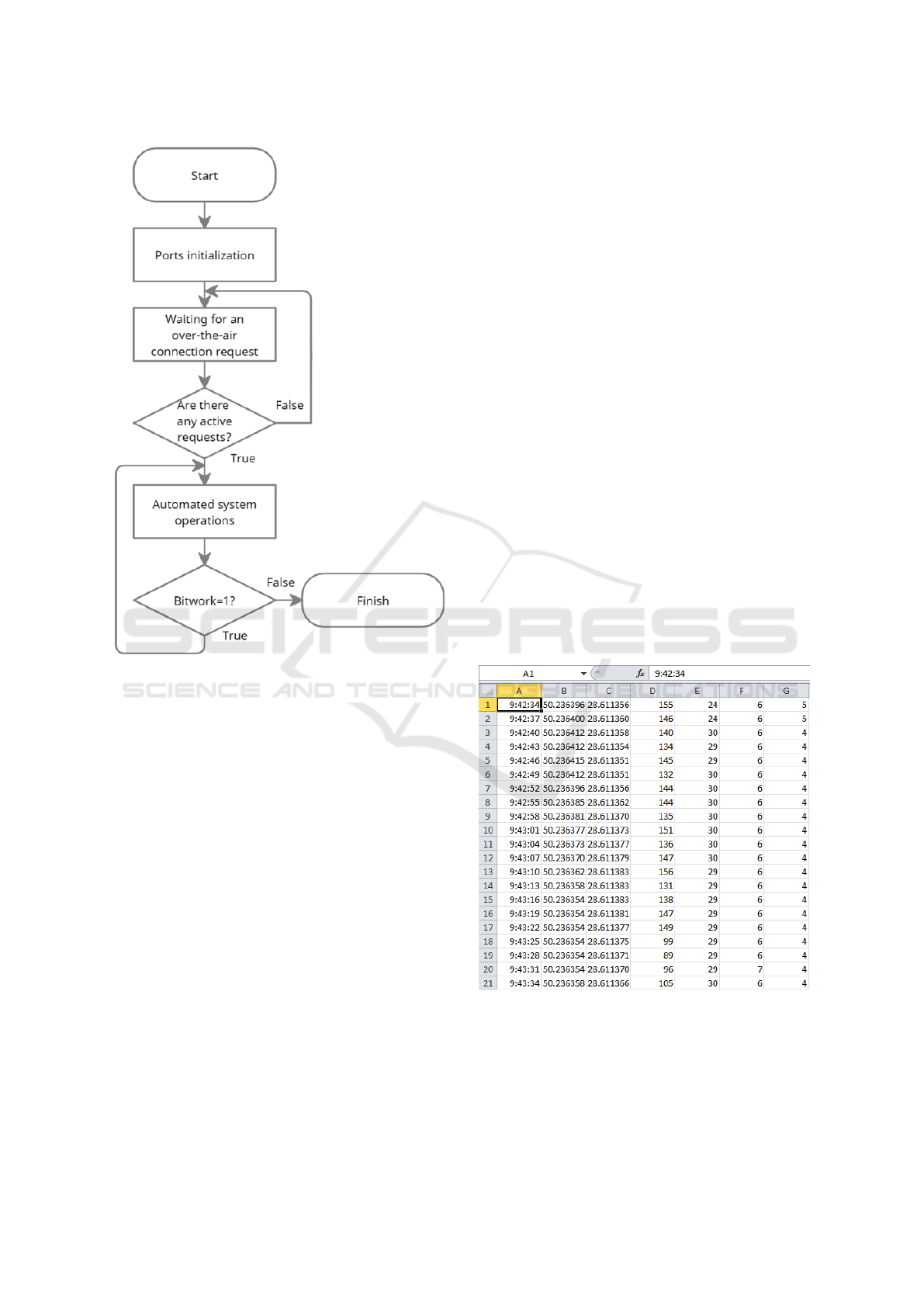
Figure 4: The basic algorithms of the control panel.
ing a wavelet diagram of the reservoir bottom section.
If the data recording system is activated again, it is
checked whether the coordinates of the module are
determined, and the work continues in the cycle. Oth-
erwise, the reactivation of the system is expected.
With the help of radio modules, such data as con-
trol signals from the remote control are transmitted.
They are responsible for the movement of the plat-
form, turning on/off the dimensions, and collecting a
water sample for deeper analysis. In addition, there
is a data transfer received from sensors, namely water
acidity level, temperature, depth, coordinates of the
platform location, and battery charge level.
To create a map of the bottom relief, first of all, it
is necessary to collect data on the depth of the reser-
voir using an ultrasonic distance sensor JSN-SR04T-
2.0. Then, two more parameters are needed to build
a three-dimensional model. One of them is time, and
the other is coordinates, the determination of which
is performed using GPS data of the mobile platform
location on the reservoir. Finally, when conducting
research, it is necessary to choose a site on the reser-
voir and, moving through the reservoir step by step,
receive data from the depth sensor and coordinates
at these points, respectively, and write this data to a
file on the platform of the RPi 3B+ mini computer in-
stalled on the mobile platform.
3.5 Data Processing
The MATLAB system was used to process the data
and build a three-dimensional relief model of the bot-
tom of the reservoir, namely the Wavelet Toolbox,
which provides functions and applications for analyz-
ing and synthesizing signals and images. The tool-
box includes algorithms for continuous wavelet anal-
ysis, wavelet coherence, synchrosqueezing, and data-
adaptive time-frequency analysis. Using continuous
wavelet analysis, it is possible to study how spectral
functions evolve with time, identify common time-
varying patterns in two signals, and perform time-
localized filtering. Discrete wavelet analysis helps to
analyze signals and images in different extensions to
detect discontinuities and other defects that are not
easily visible in the raw data. In addition, it is possi-
ble to compare signal statistics on multiple scales and
perform a fractal analysis of the data to reveal hid-
den patterns. Finally, with the Wavelet Toolbox, you
can obtain a sparse representation of data valid for de-
noising or compressing data while preserving impor-
tant features. Many toolbox functions support C/C++
code generation.
Figure 5: Recorded data from a flash drive.
The investigation results prove that using wavelet
transformations at the given stage of work is not en-
tirely appropriate. Undoubtedly, it is necessary to
follow a clear route to use wavelet transformations.
For instance, it is crucial to select the coordinates of
CSSE@SW 2022 - 5th Workshop for Young Scientists in Computer Science Software Engineering
54
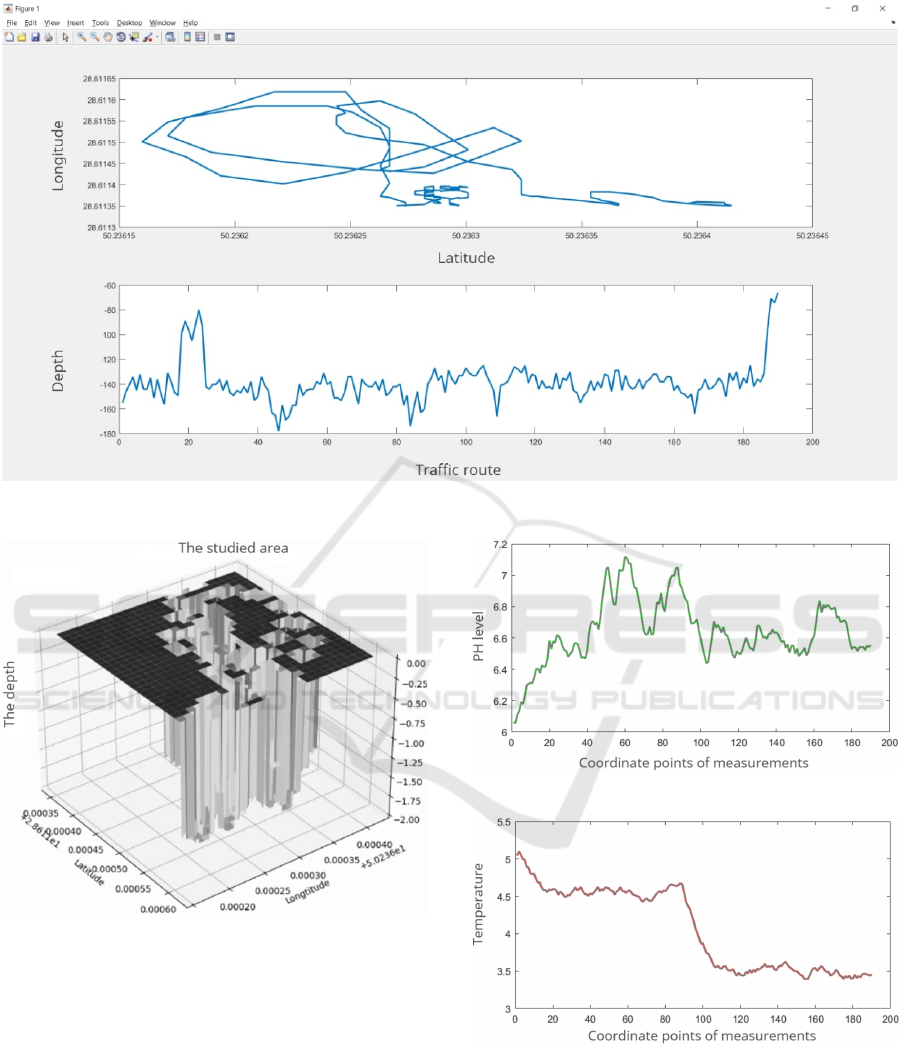
Figure 6: Intelligent robotic platform movement route and two-dimensional depth plot.
Figure 7: Three-dimensional model of the bottom of the
reservoir.
a specific section, which are autonomously traversed
robotically by the platform at the same speed, the
same passes, and exclude measurement errors due to
the influence of external factors.
4 CONDUCTING AN
EXPERIMENT
Before the experiment, the platform and all elements’
efficiency were thoroughly checked. Then, a shallow
Figure 8: Changes in water acidity in the reservoir.
Figure 9: Water temperature changes in the reservoir.
water body was chosen for the test launch of the in-
telligent robotic platform and the necessary data col-
lection. Finally, a route with different trajectories was
traversed, and sensor data were recorded, which was
the primary aim of the research.
All the research data is recorded in a file stored on
a flash drive. It is convenient for further processing
An Intelligent Robotic Platform for Conducting Geodetic and Ecological Surveys of Water Bodies
55

and analysis. Some recorded data is shown in figure 5.
The GPS module determines the current location
and indicates the exact time regarding the location in
specific coordinates. The data analysis makes it possi-
ble to build a map of the intelligent robotic platform’s
route and a two-dimensional depth graph (figure 6).
Furthermore, a three-dimensional model of the
reservoir bottom was built based on the platform’s
route data and measured data at specific points along
the route. However, it is not highly detailed, as it con-
siders only the specified points of the route. Thus, to
increase its informativity, all intermediate points must
be filled with relevant data (figure 7).
According to the readings of the temperature and
acidity sensor at each determined point of the robotic
platform route, graphs of changes in these values were
built (figure 8, 9).
5 CONCLUSIONS
The research introduces a new intelligent robotic plat-
form for geodetic and ecological studies of water bod-
ies. It helps assess water quality and measure a wa-
ter body’s depth. It provides a detailed layout of all
structural elements, describes the methodology, and
clarifies further data processing. Sensitive system ele-
ments such as temperature, water acidity, and distance
sensor were chosen, which meet all platform instal-
lation requirements. Finally, it investigates the effec-
tiveness and correctness of the system performance on
a natural reservoir (a river and a lake). Furthermore,
all necessary measurements were taken, including a
water sample. Based on the results, conclusions were
made about the water quality in the reservoir. More-
over, three-dimensional models of the studied bottom
area and graphs of changes in the values (tempera-
ture and acidity) were constructed. In addition, the
research highlights the problem of using a wavelet di-
agram to describe the area of the reservoir bottom.
The installation has a set of functions, which can
be increased in the future, for example, adding the
function of work autonomy at specified points, which
contributes to building a full-fledged detailed map of
the reservoir bottom. In addition, the article considers
the possibility of a more detailed analysis of water
locally.
REFERENCES
Bezvesilna, O., Tkachuk, A., Chepyuk, L., Nechai, S., and
Khylchenko, T. (2017). Introducing the principle of
constructing an aviation gravimetric system with any
type of gravimeter. Eastern-European Journal of En-
terprise Technologies, 1(7(85)):45–56. https://doi.org/
10.15587/1729-4061.2017.92941.
Brans, P. (2021). What Norwegians are learning as they pi-
oneer autonomous ships. https://tinyurl.com/4pcatcdt.
Chung, H.-Y., Chung, Y.-L., and Hung, Y.-J. (2018). An
Effective Hexapod Robot Control Design Based on a
Fuzzy Neural Network and a Kalman Filter. In 2018
IEEE Region Ten Symposium (Tensymp), pages 248–
253. https://doi.org/10.1109/TENCONSpring.2018.
8691947.
Dimitropoulos, S. (2019). The New Ocean Ex-
plorers. https://www.popularmechanics.
com/technology/infrastructure/a29849406/
unmanned-ocean-drones-antarctic-voyage/.
Dr
˘
agan, O. (2021). This Solar-Powered Electric Ferry Is
the First Maritime Robotaxi in Europe. https://tinyurl.
com/4bf65wut.
Koval’, A. V. (2015). Simulation of gravimetric mea-
surements by gyroscopic integrator of linear accelera-
tions. Gyroscopy and Navigation, 6:344–347. https:
//doi.org/10.1134/S2075108715040070.
Li, Y., Wang, X., Zhao, Z., Han, S., and Liu, Z. (2020). La-
goon water quality monitoring based on digital image
analysis and machine learning estimators. Water Re-
search, 172:115471. https://doi.org/10.1016/j.watres.
2020.115471.
Niiler, E. (2020). The Robot Ships Are Com-
ing . . . Eventually. https://www.wired.com/story/
mayflower-autonomous-ships.
Rivero, N. (2022). Japan is home to the world’s first
autonomous container ships. https://tinyurl.com/
bdfpdf7e.
Sea Machines (2023). SM300 Autonomous Command &
Control.
Tedeschi, F. and Carbone, G. (2014). Design Issues
for Hexapod Walking Robots. Robotics, 3:181–206.
https://doi.org/10.3390/robotics3020181.
CSSE@SW 2022 - 5th Workshop for Young Scientists in Computer Science Software Engineering
56
