
Emergency Task Allocation Mechanism Based on Reputation and
Region
Shiyue Dai
1
, Lei An
2
, Yixin Zhu
2
, Gan Shao
2
, Yabin Qin
2
and Lanlan Rui
1
1
State Key Laboratory of Networking and Switching Technology, Beijing University of Posts and Telecommunications,
Beijing, China
2
State Grid Ningbo Power Supply Company, Zhejiang, China
Keywords: Communication Network, On-Site Operation and Maintenance, Task Allocation.
Abstract: In the communication network operation and maintenance management system structure, on-site operation
and maintenance is at bottom position, and its quality and efficiency play a vital role in the smooth operation
of the communication network. For emergencies in on-site scenes, we proposed an emergency task allocation
method. We predict the completion by evaluating staff’s historical working expressiveness and activeness.
Then, we combine the staff’s comprehensive reputation and movement pattern to design task allocation and
personnel scheduling methods. Experiments proves our mechanism can reasonably allocate unexpected tasks
based on accurately evaluating the ability of staff, and improve both allocation successful rate and completion
quality. Our emergency task allocation mechanism can effectively improve the quality and efficiency of on-
site operation and maintenance, and enhance the anti-damage ability of the communication network.
1 INTRODUCTION
In order to ensure the safe and stable of the
communication network, the technical means and
measures of on-site operation and maintenance
management is extremely necessary (Liu S et al.,
2020). The responsibility of operation and
maintenance staffs is inspecting and repairing
network equipment and infrastructure (Warabino T et
al., 2021).
As the increasing business needs of
communication network (Chen W et al., 2021), the
connection relationship between equipment tends to
be complicated (Ren B et al., 2020), so it also
increases operation and maintenance difficulty (He L
et al., 2021). On-site operation and maintenance’s
problems such as heavy workload (Yang Z et al.,
2021), low task allocation efficiency (Sven T and
Sonke D, 2018) and lack of information support (M.
Xu et al., 2019) need to be solved urgently.
The task types of on-site operation and
maintenance of the communication network are
divided into routine task and emergency task. Routine
task is the daily inspection (Liang J et al., 2021), and
emergency task is the random fault and it usually
spread rapidly with the network topology (Yang S et
al., 2021). Considering emergency tasks should be
solved efficiently and effectively, we optimize the
method of selecting staff based on quality and celerity
requirement.
Emergency Task Allocation Mechanism based on
Reputation and Region (ETARR) we proposed can
evaluate the comprehensive reputation and
movement pattern of staffs to find the most suitable
staff. Comprehensive reputation guarantees the
completion quality while movement pattern ensures
the completion efficiency. Experiments show that our
mechanism improves the management level of
operation and maintenance.
2 RELATED WORKS ON
QUALITY EVALUATION AND
REGION PREDICTION
In terms of quality requirement, the experience and
ability of staffs determine the quality of task
completion. There are many studies devoted to the
precise analysis of user behaviour. Paper (Xiong X,
2020) builds a multi-dimensional panoramic portrait
of the user to encode users' primary attributes related
interests and behavioural preferences. But this
686
Dai, S., An, L., Zhu, Y., Shao, G., Qin, Y. and Rui, L.
Emergency Task Allocation Mechanism Based on Reputation and Region.
DOI: 10.5220/0012017000003612
In Proceedings of the 3rd International Symposium on Automation, Information and Computing (ISAIC 2022), pages 686-692
ISBN: 978-989-758-622-4; ISSN: 2975-9463
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
method requires the support of massive user data.
Trust evaluation based on user behaviour has been
studied in many computer science domains including
e-commerce, social network, etc (Wu Z et al., 2021).
Paper (Zhang L et al., 2020) evaluates the credit of
power users based on k-means clustering and
Silhouette Coefficient method. Paper (Yang M et al.,
2019) proposes a credible evaluation scheme
combined with entropy weighting, overcoming the
limitations of subjective weight assignation. Paper
(Wang H et al., 2018) proposes a dynamic trust model
based on time decay factor. When users do not
interact for a period, their trust will decrease over
time.
In terms of celerity requirement, many researches
use deep learning models for path prediction. Paper
(Rathore P et al., 2018) proposes a scalable cluster-
based and Markov chain-based hybrid framework,
suitable for short-term and long-term Trajectory
Prediction, and they can handle many overlapping
trajectories in dense road networks. Aiming at the
problem of poor prediction accuracy caused by sparse
trajectory data, paper (Li F et al., 2019) uses
Prediction by Partial Matching and Probability Suffix
Tree to predict cluster links. Paper (Zhang W et al.,
2018) uses a recurrent neural network-based trajectory
prediction method, which provides high-precision
prediction within one minute. The Long Short-Term
Memory (LSTM) model is one of the most used
vehicle trajectory prediction models. In order to solve
the problem of long-term trajectory prediction in
dense traffic, literature (Dai S et al., 2019) proposed a
Spatio-Temporal Long Short-Term Memory (ST-
LSTM), which embeds spatial interaction into the
LSTM model to implicitly measure the interaction
between adjacent vehicles. At the same time, paper
(Inkyu C et al., 2019) uses LSTM to model the moving
information of pedestrians, and maps the position of
each pedestrian to a high-dimensional feature space to
predict the displacement.
3 REPUTATION-REGION-BASED
EMERGENCY TASK
ALLOCATION MECHANISM
3.1 Task Allocation Problem
Description
Time limitation and accuracy demand is the main
characteristic of emergency task. On one hand,
emergency tasks have high requirements on the
experience and ability of staffs in problem-solving,
and on the other hand, it requires staff to arrive at site
quickly.
ETARR consists of a comprehensive reputation
computation model and a movement-pattern-based
regional prediction model. The comprehensive
reputation computation model evaluates the ability of
staff from expressiveness and activeness. The
regional prediction model evaluates the current
working status and area, to select the staff who can
reach the site with lowest cost.
3.2 Comprehensive Reputation Module
Definition 1. Comprehensive Reputation ( 𝐶𝑅). It
represents the quality and efficiency when the staff
deal with tasks. It is divided into working
expressiveness ( 𝜔
) with proportion of 𝛾 and
working activeness ( 𝜔
) with proportion of 𝛿 as
shown in equation (1).
𝐶𝑅=𝛾∙𝜔
+𝛿∙𝜔
(1)
Definition 2. Task Reputation (𝑇𝑅). It points 1 to 5
and is given to all participants after one task
completed. It stores in the database as a basic
indicator of CR.
Definition 3. Working Expressiveness. It refers to the
ability of the staff, and it is evaluated by his history
TR.
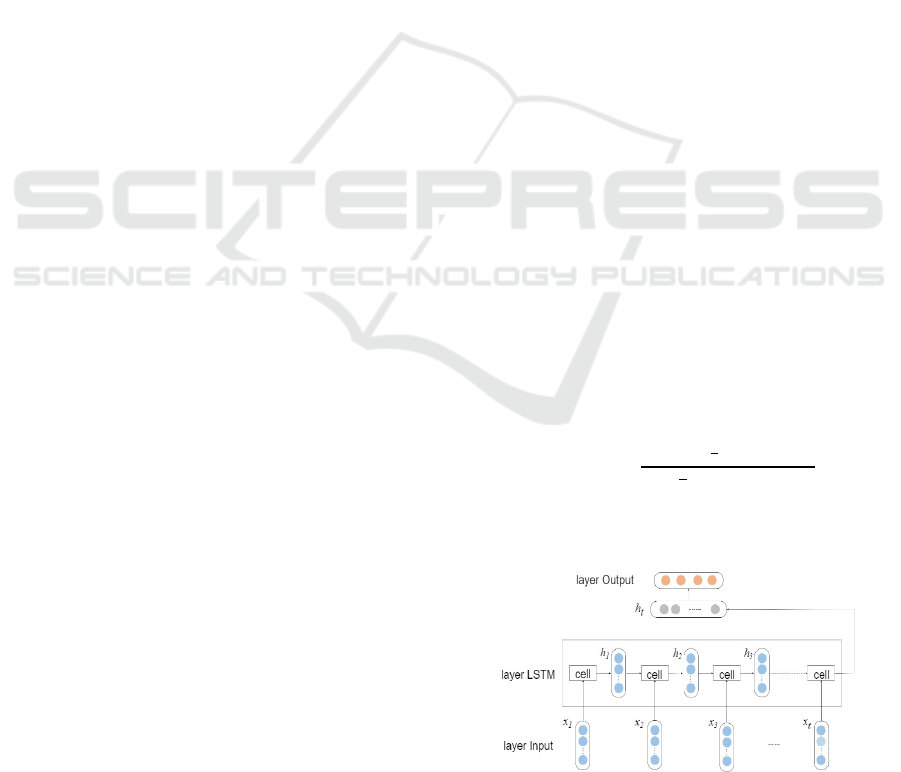
We use LSTM model with "memory unit" to solve
the TR sequence problem, and the output is the
Working Expressiveness. The input and output of
LSTM is in equation (2). Working mechanism of the
LSTM model is shown in Figure 1.
𝑐
()
,ℎ
()
,ℎ
()
⎯
⎯
⎯
⎯
⎯
⎯
⎯
𝑐
()
,ℎ
()
(2)
Definition 4. Working Activeness. It refers to the
enthusiasm of staff, and it is evaluated by the number
of tasks he has participated in as shown in equation
(3).
𝜔
=
(/)
(/)
(3)
Where 𝑡 is the total number of days (𝑡=30 in our
experiment), and 𝑑 is the number of working days of
the staff among 𝑡.
Figure 1: Working mechanism of LSTM model.
Emergency Task Allocation Mechanism Based on Reputation and Region
687

3.3 Region Prediction Model Based on
Movement Pattern
3.3.1 Staff Active Region Division
When remotely operating and controlling the
operation and maintenance conditions, due to the
sparseness of GPS data (Aiswarya R and Surendran
S, 2020) and the unstable network connections, the
locations of personnel are stored discretely and it is
difficult to find the trajectory path. Therefore, it is
necessary to preprocess the position points, and
cluster the movement between position points into the
transfer between regions.
The k-means algorithm is a classic clustering
analysis method with three steps.
First, initialize. Randomly set 𝑘 number of
position points as the initial centroid 𝑚
(1≤𝑗≤𝑘).
Second, distribution. Calculating the distance
between each centroid and every position point 𝑥
in
the set, allocate every point to the cluster 𝐶
with the
smallest distance squared as shown in equation (4).
𝐶
()
={𝑥
:∥𝑥
−𝑚
()
∥
≤∥𝑥
−𝑚
()
∥
,∀𝑗,1≤
𝑗≤𝑘} (4)
Finally, update. Calculate the mean value of all
points in the cluster and use it as the new centroid, as
shown in equation (5).
𝑚
()
=(
∑
𝑥
∈
()
)/|𝐶
()
| (5)
Repeat the distribution and update operations
until there is no change of the cluster result of active
region.
3.3.2 Movement Pattern Computation
Definition 5. Movement Pattern (MP). It means a
movement trajectory that can reflect the personalized
moving behaviour and location preferences of the
personnel in the operation and maintenance site,
which helps to predict the location. MP set represents
a collection of multiple MPs of different lengths.
We have divided the staff’s active region in
section 3.3.1. Next, we create the task-region list
according to the task location, and the task level is
divided according to the difficulty and urgency, to
form a double cluster of both the task location and the
task level. The range of task level is [1,5] .
Considering the TR of personnel, task level is
required to be similar but lower than the average
value of the TR of who can solve the problem. We
believe that tasks of the same level in the same area
can be substituted for each other when reflecting the
behaviour of staffs. Therefore, we no longer
distinguish tasks based on task numbers, but based on
regions and levels, so that it is easy to summarize the
historical path of personnel.
The Historical Path ( 𝑃 ) is defined as a
multivariate vector group
(〈
𝑟
,𝑙
〉
,
〈
𝑟
,𝑙
〉
,…,
〈
𝑟
,𝑙
〉)
. Where i-th item of the
vector group represents the information of task 𝑡
,
including 𝑟
represents the number of the located area
and 𝑙
represents the level.
Define the confidence parameter (CP) of a path,
which is positively correlated with the possibility of
staff appearing in this path, and the equation is (6). A
path is selected as the main path (𝑝𝑎𝑡ℎ
), and a path
in the historical path set is selected as the path to be
calculated (𝑝𝑎𝑡ℎ
).
𝐶𝑃
(
𝑝𝑎𝑡ℎ
|
𝑝𝑎𝑡ℎ
)
=
∆
𝑝𝑎𝑡ℎ
𝑖𝑠 𝑡ℎ𝑒 𝑠𝑢𝑏 − 𝑝𝑎𝑡ℎ 𝑜𝑓 𝑝𝑎𝑡ℎ
0 𝑝𝑎𝑡ℎ
𝑖𝑠 𝑛𝑜𝑡 𝑡ℎ𝑒 𝑠𝑢𝑏− 𝑝𝑎𝑡ℎ 𝑜𝑓 𝑝𝑎𝑡ℎ
(6)
Where sub-path means the vector groups of 𝑝𝑎𝑡ℎ
is the sub-group of the vector groups of 𝑝𝑎𝑡ℎ
, and
∆ represents the number of vector groups missing
from the sub-path compared with 𝑝𝑎𝑡ℎ
.
The core of the region prediction model based on
MP is to classify staff’s historical path set according
to the length of path, and select a MP of each length.
The way is calculating 𝐶𝑃 of each path relative to all
historical paths and add them to get the total
confidence parameter (𝐶𝑃𝑇). Choose path with the
largest 𝐶𝑃𝑇 in same length as the MP of the length.
MPs under all length paths consist the MP set.
3.4 Task Allocation Method Based on
Comprehensive Reputation and
Region Prediction
3.4.1 Personnel and Task Information List
Table 1 is an example of Personnel Information List.
"Path" is used to evaluate MP. "Status" has several
options and their meaning is shown in Table 2.
"CurrentRegion" is for the static personnel while
"AimRegion" is only for the dynamic personnel.
"StartTime" refers to the beginning time of the Status.
Table 3 is an example of Emergency Task List
putting in OccurTime order.
ISAIC 2022 - International Symposium on Automation, Information and Computing
688
Table 1: Personnel Information List.
Sta
f
f
ID StaffName Path Status CurrentRe
g
ion AimRe
g
ion StartTime C
R
0001 To
m
P1 Working r1 null 14:51 4
Table 2: Meaning and Type of Staff Status.
Status Description
N
ew Tas
k
T
y
pe
Free he is taking a break and have no task in the future. suitable static
Workin
g
he is doin
g
routine task or emer
g
enc
y
task. suitable
Allocate
d
He is taking a break or working but have a scheduled
task in the future.
no
t
suitable
Goin
g
to Routine He is on the wa
y
to the routine task site. suitable dynamic
Going to Emergency He is on the way to the emergency task site. no
t
suitable
Table 3: Emergency Task List.
TaskID TaskName Level Re
g
ion OccurTime Staff
191205001 repair cable 5 r1 11:00
3.4.2 Task Allocation Algorithm
We consider three main factors when allocate the
personnel for emergency task.
1). Personnel active region. In Section 3.3.1, we
divide the personnel activity area into a directed
graph. In order to simplify the calculation, it is
assumed that the distance between adjacent areas is a
unit of length. Therefore, we set the time spent on the
way between neighbouring regions as 2𝑇.
2). Staff status. For static personnel, latency
depends on the remaining time of current task
(𝑟.𝑗𝑜𝑏𝑡𝑖𝑚𝑒) and the distance between current area
(𝑟.𝑎𝑟𝑒𝑎) and emergency task area (𝑡.𝑎𝑟𝑒𝑎). For
dynamic personnel, after predict the area they will
reach, the latency depends on the distance between
the area to be reached (𝑟.𝑝𝑟𝑒) and 𝑚.𝑎𝑟𝑒𝑎. The
equation of latency of personnel going to task site is
(7).
𝑙𝑎𝑡𝑒𝑛𝑐𝑦=
⎩
⎪
⎪
⎨
⎪
⎪
⎧
𝑑𝑖𝑠𝑡𝑎𝑛𝑐𝑒
(
𝑟.𝑎𝑟𝑒𝑎,𝑡.𝑎𝑟𝑒𝑎
)
× 2𝑇
Status is Free
𝑑𝑖𝑠𝑡𝑎𝑛𝑐𝑒
(
𝑟.𝑎𝑟𝑒𝑎,𝑡.𝑎𝑟𝑒𝑎
)
× 2𝑇 − 𝑟.𝑗𝑜𝑏𝑡𝑖𝑚𝑒
Status is Working
∞ Status is Allocated
𝑑𝑖𝑠𝑡𝑎𝑛𝑐𝑒
(
𝑟.𝑝𝑟𝑒,𝑡.𝑎𝑟𝑒𝑎
)
× 2𝑇
Status is Going to Emergency
(7)
3). Staff reputation. To ensure the completion of
the task, it is regulated that the 𝐶𝑅 of personnel must
be greater than or equal to the task level.
Define 𝑘 as the distance between a certain area
and the current emergency task area. 𝑅 is the set of
areas with a distance of 𝑘 from the emergency task.
𝑚𝑖𝑛𝐼𝐷 is the ID of staff who is most capable for the
emergency task. 𝑚𝑖𝑛𝐿𝑎𝑡𝑒𝑛𝑐𝑦 is the delay for 𝑚𝑖𝑛𝐼𝐷
to arrive at the task.
The steps of ETARR are as follows.
Step 1. Initialize the parameters. 𝑘=0, 𝑅=∅,
𝑚𝑖𝑛𝐼𝐷 and 𝑚𝑖𝑛𝐿𝑎𝑡𝑒𝑛𝑐𝑦 are the largest integers.
Step 2. Obtain historical staff position point and
task location from management system. using the
directed graph clustered by point generates historical
path set and divides the task region and task level. Get
regions which distance 𝑘 to current emergency task
and store them in 𝑅;
Step 3. If the latency of distance 𝑘 is less than
𝑚𝑖𝑛𝐿𝑎𝑡𝑒𝑛𝑐𝑦, do Step 4. Otherwise do Step 7;
Step 4. Go through static personnel in 𝑅. If meet
the requirements of 𝐶𝑅, calculate 𝑙𝑎𝑡𝑒𝑛𝑐𝑦;
Step 5. If the 𝑙𝑎𝑡𝑒𝑛𝑐𝑦 is less than 𝑚𝑖𝑛𝐿𝑎𝑡𝑒𝑛𝑐𝑦,
update 𝑚𝑖𝑛𝐿𝑎𝑡𝑒𝑛𝑐𝑦 and 𝑚𝑖𝑛𝐼𝐷.
Step 6. If the traversal of staff in the area is
completed, 𝑘++. Otherwise do Step 4;
Step 7. Obtain the dynamic staff set and go
through it. If meet the requirements of 𝐶𝑅, calculate
MP and the difference 𝑥 between the current time and
the start time;
Step 8. Analyse the movement habits and location
preferences according to staff’s MP, and predict
𝑟.𝑝𝑟𝑒 before calculate 𝑙𝑎𝑡𝑒𝑛𝑐𝑦;
Step 9. If the 𝑙𝑎𝑡𝑒𝑛𝑐𝑦 is less than 𝑚𝑖𝑛𝐿𝑎𝑡𝑒𝑛𝑐𝑦,
update 𝑚𝑖𝑛𝐿𝑎𝑡𝑒𝑛𝑐𝑦 and 𝑚𝑖𝑛𝐼𝐷.
Step 10. If the traversal of dynamic staff is
completed, end. Otherwise do Step 7.
Emergency Task Allocation Mechanism Based on Reputation and Region
689
4 EVALUATION
4.1 Performance of Working
Expressiveness Prediction
Definition 6. Error Rate (𝐸𝑟𝑟). The equation is (8),
where 𝑥
is the prediction value and 𝑦
is the actual
value.
𝐸𝑟𝑟=
× 100% ( 8 )
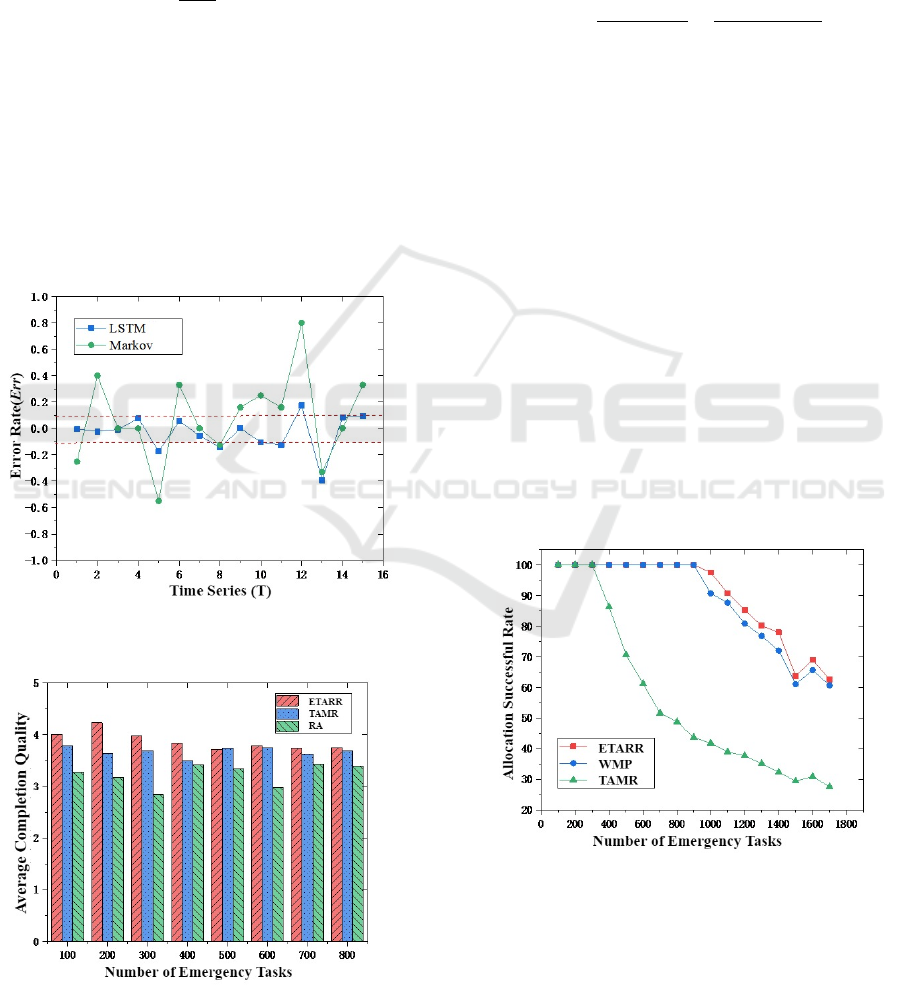
Figure 2 shows calculation of the error rate
between actual value and predict value by LSTM
model and Markov model. It can be seen that 𝐸𝑟𝑟
is almost kept within 10%, while 𝐸𝑟𝑟
is
concentrated in 10% to 40%. This is because the
Markov model has no memory, and the prediction of
next value is only based on the current value. On the
contrary, the LSTM model has a long-term memory,
which can well match the characteristics that work
expressiveness has strongly related to the historical
value.
Figure 2: The prediction Error Rate of Working
Expressiveness.
Figure 3: Average Completion Quality of different number
of emergency tasks.
4.2 Performance of Emergency Task
Allocation
4.2.1 Average Completion Quality
Definition 7. Average Completion Quality (𝑄𝐿𝑇). It
refers to the effect of the repairing task, and is
evaluated by 𝑇𝑅 as equation (9).
𝑄𝐿𝑇=
∑
=
∑∑
(9)
Where 𝑁 is the number of completed tasks in a
period, 𝑄𝑢𝑎𝑙𝑖𝑡𝑦
is the Completion Quality of task 𝑖.
𝑀 is the number of staffs involved in the task, 𝐾
is
the number of tasks completed by the m-th staff, and
𝑇𝑅
is TR obtained by the m-th staff after completed
task 𝑘.
Figure 3 shows the comparison of 𝑄𝐿𝑇 in three
algorithms. The RA does not consider the differences
of staffs’ ability, and only assigns task to a closer staff
randomly. This will lead to some difficult tasks that
cannot be successfully completed while some
professional staffs spend time doing easy task. But
ETARR divides staffs into different expressiveness
and activeness, so as to accurately match personnel
capability and task difficulty as much as possible.
4.2.2 Allocation Successful Rate
Definition 8. Allocation Successful Rate. It is defined
to the proportion of the number of emergency tasks
finished successfully to the total number of
emergency tasks.
Figure 4: Task Allocation Successful Rate for different
number of emergency tasks.
ISAIC 2022 - International Symposium on Automation, Information and Computing
690
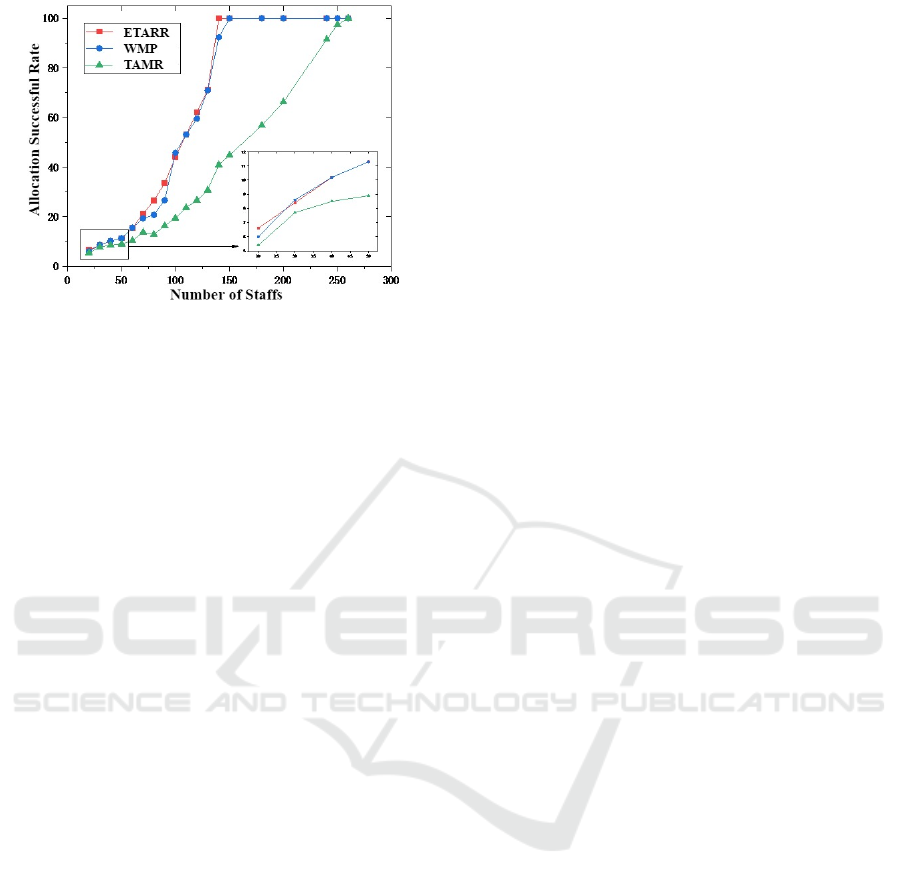
Figure 5: Task Allocation Successful Rate for different
number of staffs.
Setting the number of staffs is 150 and number of
routine tasks is 1000. As Figure 4 shown, when the
number of emergency tasks is less than 900, both
ETARR and WMP (Jiang Y et al., 2018) have a high
task Allocation Successful Rate. When the number of
tasks is greater than 900, the workload of staffs is
saturated. Many staffs remain in the "Allocated" state
and unable to accept new assignments, resulting in a
sharp drop in the successful rate. However, because
the ETARR makes full use of the geographical
advantages of the nearby region and reduces the
staff’s time consuming on the road, the staff can
complete a little more task.
Setting the number of routine tasks and
emergency tasks are both 1000. As Figure 5 shown,
when the number of staffs is close to 150, both
ETARR and WMP can achieve 100% allocation of
emergency tasks, while TAMR requires 250 staffs to
achieve this goal. This is because TAMR only
considers the task allocation method of static
personnel when assigning tasks, but the ETARR takes
full advantage of dynamic personnel who can handle
emergency tasks in passing.
5 CONCLUSION
Aiming at the emergency tasks in the on-site
operation and maintenance of the communication
network, we propose an emergency task allocation
mechanism based on the comprehensive reputation
and area of operation and maintenance staffs. Our
mechanism ensures the efficient and effective
operation of on-site operation and maintenance, and
brings greater benefits to the communication network
operation and maintenance system.
REFERENCES
Liu S, Li X, Dong L, Wei X and Wang Q. 2020. Discussion
on the elastic optical network technology of the
centralized control architecture of the power data
communication network. 2020 International
Conference on Computer Vision, Image and Deep
Learning (CVIDL), pp. 388-392.
Warabino T, Suzuki Y and Otani T. 2021. Robotic
Assistance Operation for Effective On-site Network
Maintenance Works. 2021 22nd Asia-Pacific Network
Operations and Management Symposium (APNOMS),
pp. 132-137.
Chen W, Jiang T, Cao J, Zhang J and Zhang X. 2021.
Research on Operation Management and Maintenance
Strategy of Communication Network. 2021 2nd
International Conference on Computer Communication
and Network Security (CCNS), pp. 1-4.
Ren B, Li J, Zheng Y, Chen X, Zhao Y, Zhang H, Zhen C.
2020. Research on Fault Location of Process-Level
Communication Networks in Smart Substation Based
on Deep Neural Networks. IEEE Access, 8, 109707-
109718.
He L, Yi J, Li M, Guo Q and Li F. 2021. Discussion on
Communication Simulation Method of Backbone
Optical Transmission Network. IEEE 5th Advanced
Information Technology, Electronic and Automation
Control Conference (IAEAC), pp. 1952-1956.
Yang Z, Wu G, He Y, Xie J, Chen Y and Chen X. 2021. A
Label Management System and Its Application in
Optical Transmission Network. 2021 13th International
Conference on Communication Software and Networks
(ICCSN), pp. 119-122.
Sven T and Sonke D. 2018. Actor-Oriented Optimization
Model for Maintenance Tasks. 2018 Winter Simulation
Conference (WSC), pp. 3941-3952.
M. Xu, X. Zhao, C. Cai and J. Liu, 2019. Research on
Intelligent Operation and Maintenance Platform of
User Distribution Equipment. 2019 IEEE 3rd Advanced
Information Management, Communicates, Electronic
and Automation Control Conference (IMCEC), pp.
1763-1766.
Liang J, Li Y and Zhang L. 2021. Design and Research of
Intelligent Inspection Management System for
Distribution Network. International Conference on
Electricity Distribution, pp. 27-32.
Yang S, Dong L, Deng G and Liu Y. 2021. Design and
Implementation of Fault Diagnosis System for Power
Communication Network Based on CNN. 2021 13th
International Conference on Communication Software
and Networks (ICCSN), pp. 69-74.
Xiong X. 2020. User Profiling and Behavior Evaluation
Based on Improved Logistics Algorithm. 2020 IEEE
International Conference on Networking, Sensing and
Control (ICNSC), pp. 1-6.
Wu Z, Tian L, Wang Z and Wang Y. 2021. Web User
Behavior Trust Evaluation Model Based on Fuzzy Petri
Net. IEEE 6th International Conference on Big Data
Analytics, pp. 344-348.
Emergency Task Allocation Mechanism Based on Reputation and Region
691

Zhang L, Bai X and Chen Y. 2020. Research on Power
Market User Credit Evaluation Based on K-Means
Clustering and Contour Coefficient. 3rd International
Conference on Robotics, Control and Automation
Engineering (RCAE), pp. 64-68.
Yang M, Zhang S, Zhang H and Xia J. 2019. A new user
behavior evaluation method in online social network.
Journal of Information Security and Applications, 47.
217-222.
Wang H, Jiang J and Li W. 2018. A Dynamic Trust Model
Based on Time Decay Factor. 2018 IEEE SmartWorld,
Ubiquitous Intelligence, Guangzhou, pp 2048-2051.
Rathore P, Kumar D and Rajasegarar S. 2018. A Scalable
Framework for Trajectory Prediction. IEEE
Transactions on Intelligent Transportation Systems,
20(10), 3860 - 3874.
Li F, Li Q and Li Z. 2019. A Personal Location Prediction
Method Based on Individual Trajectory and Group
Trajectory. IEEE Access, 7, 92850 – 92860.
Zhang W, Liu Y and Liu T. 2018. Trajectory Prediction
with Recurrent Neural Networks for Predictive
Resource Allocation. International Conference on
Signal Processing, Beijing, pp. 634-639.
Dai S, Li L and Li Z. 2019. Modeling Vehicle Interactions
via Modified LSTM Models for Trajectory Prediction.
IEEE Access, 7, 38287-38296.
Inkyu C, Hyok S and Jisang Y. 2019. Deep Learning Based
Pedestrian Trajectory Prediction Considering Location
Relationship between Pedestrians. 2019 International
Conference on Artificial Intelligence in Information
and Communication (ICAIIC), Okinawa, pp 449-451.
Aiswarya R and Surendran S. 2020. Cluster Detection and
Maintenance in Mobile Wireless Network Users,
International Conference on Communication and
Signal Processing, pp. 1167-1172.
Jiang Y, He W, Cui L and Yang Q. 2018. User Location
Prediction in Mobile Crowdsourcing Services.
International Conference on Service-Oriented
Computing (ICSOC), Hangzhou, pp. 515-523.
ISAIC 2022 - International Symposium on Automation, Information and Computing
692
