
DaDe: Delay-Adaptive Detector for Streaming Perception
Wonwoo Jo
1,∗
, Kyungshin Lee
2,†
, Jaewon Baik
1,∗
, Sangsun Lee
1,∗
, Dongho Choi
1,∗
and Hyunkyoo Park
1,∗
1
C&BIS Co.,Ltd., Republic of Korea
2
Independent Researcher, Republic of Korea
∗
Keywords:
Streaming Perception, Real-Time Processing, Object Detection.
Abstract:
Recognizing the surrounding environment at low latency is critical in autonomous driving. In real-time envi-
ronment, surrounding environment changes when processing is over. Current detection models are incapable
of dealing with changes in the environment that occur after processing. Streaming perception is proposed to
assess the latency and accuracy of real-time video perception. However, additional problems arise in real-
world applications due to limited hardware resources, high temperatures, and other factors. In this study, we
develop a model that can reflect processing delays in real time and produce the most reasonable results. By
incorporating the proposed feature queue and feature select module, the system gains the ability to forecast
specific time steps without any additional computational costs. Our method is tested on the Argoverse-HD
dataset. It achieves higher performance than the current state-of-the-art methods(2022.12) in various environ-
ments when delayed . The code is available at https://github.com/danjos95/DADE.
1 INTRODUCTION
Recognizing the surrounding environment and react-
ing with low latency is critical in autonomous driv-
ing for a safe and comfortable driving experience. In
practice, the gap between the input data and the sur-
rounding environment widens as the processing la-
tency increases. As shown in Figure 1, surround-
ing environment changes from sensor input time t
to t + n when the model finishes processing. To ad-
dress this issue, some detectors (Redmon and Farhadi,
2018)(Ge et al., 2021) are focused on lowering the la-
tency. They can complete the entire processing be-
fore the next sensor input. It appears reasonable but
the processing delay caused a gap between the results
and the changing environment. Furthermore, current
image detection metrics such as average precision,
and mean average precision do not consider a real-
time online perception environment. It causes detec-
tors to prioritize accuracy over the delay. To evaluate
streaming performance, (Li et al., 2020) proposed a
new metric, "streaming accuracy" to integrate latency
and accuracy into a single metric for real-time online
perception. Strong detectors (He et al., 2017)(Cai
and Vasconcelos, 2018) showed a significant perfor-
mance drop in streaming perception. StreamYOLO
(Yang et al., 2022) created the model to predict future
frames by combining the previous and current frames.
Figure 1: Visualization of the results of detectors (red
boxes). Ground Truth (green boxes) changes due to image
flow. Our method can detect objects correctly even after
multiple time-step passes during processing.
It achieved state-of-the-art streaming AP performance
by successfully detecting future frame-keeping real-
time performance. In the real-world environment,
processing time varies for various reasons(e.g. Tem-
perature, Multi-modal Multi-task and sequential pro-
cessing) while running the model. It requires de-
tectors with the ability to perform multi-time-step
Jo, W., Lee, K., Baik, J., Lee, S., Choi, D. and Park, H.
DaDe: Delay-Adaptive Detector for Streaming Perception.
DOI: 10.5220/0011610700003417
In Proceedings of the 18th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2023) - Volume 5: VISAPP, pages
39-46
ISBN: 978-989-758-634-7; ISSN: 2184-4321
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
39

predictions. For example, in Figure 1(b), StreamY-
OLO outperforms the baseline detector in predicting
the next time-step frame when the processing time
is shorter than the inter-frame time. When process-
ing time exceeds inter-frame time, the system begins
to collapse and produces poor prediction results, as
shown in Result (t + n) in Figure 1. The proposed
system can function properly in an unexpectedly long
processing time environment and provide the best de-
tection at the time. In this study, we construct a
model that provides insight into the required time-
step frame. The feature queue module saves multi-
time-step image features. It prevents the need for ad-
ditional feature extraction processes, which incur ad-
ditional computational costs. The dynamic feature se-
lect module constantly monitors the processing delay
and chooses the best feature for the estimated delay.
We use StreamYOLO’s dual flow perception (DFP)
module, which fuses the previous and current frames
to make objects moving trend. The model can make
moving trend of the target time step by fusing fea-
tures from the dynamic feature select module. Ex-
periments are conducted on Argoverse-HD (Chang
et al., 2019) dataset. We tested delays in various set-
tings. Our method showed significant improvement
when compared to the baseline (StreamYOLO). As
the mean processing delay increased, the difference
between the baseline and ours widened.
This research makes three main contributions as
follows:
• We introduce delay-adaptive detector (DaDe),
which can produce future results that are tailored
to the output environment. Processing delay can-
not be stable in a real-time environment and must
be considered. We improved the baseline so that
it could handle unexpected delays. This process
has no computational cost or accuracy trade-off.
• We create a simple feature control module that
can choose the best image feature based on the
current delay trend. The feature queue module
stores previous features to avoid additional com-
putation. The feature select module monitors
pipeline delays and chooses the best feature to
create the moving trend. We can achieve accu-
rate target time results by using the DFP module
from StreamYOLO.
• Our system outperformed the state-of-the-art
(StreamYOLO) model in delay-varying environ-
ments. We changed the mean delay time to stim-
ulate delayed environments during the evalua-
tion. Our method achieved 0.7 ∼ 1.5% higher
sAP compared to the state-of-the-art method. This
work also shows considerable room for a delay-
critical system.
2 RELATED WORK
2.1 Image Object Detection
Both latency and accuracy are critical factors in ob-
ject detection. Two-stage detectors (Girshick et al.,
2013)(Girshick, 2015)(He et al., 2017)(Lin et al.,
2016) use a regional proposal system to focus on the
accuracy of offline applications. However, in the real
world, latency is more important than accuracy be-
cause the environment changes throughout process-
ing. One-stage detectors (Lin et al., 2017)(Ma et al.,
2021) have an advantage in processing time compared
to regional proposed methods. YOLO series (Red-
mon and Farhadi, 2018)(Ge et al., 2021) is one of the
mainstream performances in the one-stage detection
method. Our research is based on the YOLOX (Ge
et al., 2021) detector. YOLOX added many advanced
detection technologies (anchor free, decoupled head,
etc.) from YOLOv3 (Redmon and Farhadi, 2018) to
achieve powerful performance.
2.2 Video Detection and Prediction
There have been attempts to improve the detection
performance by using previous images from the video
stream. Recent methods, such as (Bergmann et al.,
2019)(Chen et al., 2020)(Deng et al., 2019)(Zhu et al.,
2017) use attention, optical flow, and a tracking
method to aggregate image features and achieve high
detection accuracy. The video future frame predic-
tor (Bhattacharyya et al., 2019)(Luc et al., 2017) cre-
ates unobserved future images from previous images.
The ConvLSTM-based autoencoder (Chang et al.,
2021)(Lee et al., 2021)(Chaabane et al., 2020)(Jin
et al., 2020)(Wang et al., 2020) generates representa-
tions of previous frames, and then the decoder gen-
erates future frame pixels based on those represen-
tations. However, they cannot be used in real-time
applications because they are designed for an offline
environment and do not account for latency.
2.3 Progressive Anytime Algorithm
There are previous studies on planning systems un-
der resource constraints (Boddy and Dean, 1994) and
flexible computation. The anytime algorithm can re-
turn results at any point in time. The quality of the
results gradually increases as the processing time in-
creases (Zilberstein, 1996). However, the preceding
studies do not consider environmental changes that
occur during processing. It bridges the gap between
the actual environment and the results. Our efforts are
aimed at making the model more robust, even in de-
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
40

Figure 2: Delay-adaptive Detector is illustrated for delay adaptive stream perception. The image feature is extracted by
CSPDarknet-53 and PANet, and stored in the fixed-length Feature Queue Module. The Feature Select Module investigates
delay using the currently performed preprocessing delay and the most recent inference delay. The Feature Select Module
chooses appropriate features from a list of stored features. Selected features are used to perform detection in the StreamYOLO
pipeline.
layed situations. It can produce appropriate results to
the current time even when processing time becomes
unexpectedly long.
2.4 Streaming Perception
There are two types of detectors in a real-time system:
real-time and non-real-time. A real-time detector can
complete all processing steps before the next frame
arrives. There was no metric to evaluate consider-
ing both latency and accuracy. As latency becomes
more important in a real-world application, (Li et al.,
2020) integrates latency and accuracy into a single
metric. Streaming AP (sAP) was proposed to evaluate
accuracy while considering time delay. It also sug-
gests methods for recovering sAP performance drops,
such as decision-theoretic scheduling, asynchronous
tracking, and future forecasting. StreamYOLO (Yang
et al., 2022) reduced streaming perception to the task
of creating a real-time detector that predicts the next
frame. It achieved state-of-the-art performance, but
when real-time processing is violated, the system can
collapse because it can only produce the next time-
step result.
2.5 Delay Variance
If an additional delay occurs while processing, the gap
between the results and the surrounding environment
grows larger. This leads to a bad decision, which can
lead to serious safety issues. Delays can occur for var-
ious reasons while running real-world applications.
2.5.1 Temperature
Temperature is a well-known issue in a real-time sys-
tem. Performance may be reduced to avoid permanent
damage to the processing chips. In our hardware envi-
ronment, processing speed drops to 70% at 90
◦
C, with
a performance drop of up to 50% at 100
◦
C. In au-
tonomous driving, the temperature control gets harder
since the device operates in various outdoor environ-
ments.
2.5.2 Multiple Sensor Configuration
It is critical to use multiple sensors to perceive the
surrounding environment to obtain diverse data or
a multi-view of the environment. It is becoming
more common to use lidar-camera fusion (Liu et al.,
2022)(Chen et al., 2016) or multi-camera system (Li
et al., 2022)(Wang et al., 2021) to make surrounding
recognition. Each sensor has a unique frequency and
time delay. Here, fast sensor data must wait until all
sensor data arrives, which can add to the delay.
2.5.3 Multiple Model Deploy
To build an autonomous driving system, multiple
tasks (for example, lane segmentation, traffic light
DaDe: Delay-Adaptive Detector for Streaming Perception
41

detection, 3D object detection, multi-object tracking,
and so on) must be performed parallel and dynam-
ically. (Lobanov and Sholomov, 2021) proposes a
multiple detection model with a shared backbone to
reduce computational costs. In any case, running mul-
tiple models can cause an unexpected delay in the sys-
tem’s sequential task. If the processing delay exceeds
the inter-frame spacing, the real-time system fails and
the detector results become out-of-date. We changed
the mean delay time to stimulate delayed environ-
ments during the evaluation.
2.6 Preprocessing and Inference Delay
There are preprocessing and inference stages in the
processing sensor system. The main processing unit
receives raw sensor data and refines it to create a
proper shape for the model during the preprocess-
ing stage. Following preprocessing, input data flows
into a neural processing unit, which produces re-
sults through neural networks. Since it runs sequen-
tially, preprocessing is fast but the delay can be easily
changed by a processing bottleneck. As the task be-
comes more demanding, the number of sequential op-
erations in the main processing unit increases, which
can directly affect the delay.
3 METHODOLOGY
In this study, we present a simple and effective
method for achieving the desired future results. As
in Figure 2, the Delay-adaptive Detector (DaDe) can
return the desired time-step by equipping the feature
queue module, feature select module, and Dual-Flow
Perception (DFP) module. We avoid adding extra
computation in processing to maintain real-time per-
formance.
3.1 Dual Flow Perception Module
StreamYOLO (Yang et al., 2022) suggested a DFP
module for tracking moving trends. DFP uses the
previous frame’s feature map. Dynamic flow in DFP
fuses the features of two adjacent frames to create an
object moving trend, whereas static flow is created us-
ing a standard feature extraction based on the current
frame only. 1x1 convolution layer is used for dynamic
flow, which is followed by the batchnorm and SiLU
(Ramachandran et al., 2017) to reduce the channel for
previous and current features in half. Then, DFP con-
catenates these two reduced features to generate the
dynamic features. The detector can sense the object’s
Figure 3: Pipeline of DaDe. The feature queue of the mod-
ule stores previous image features to avoid additional com-
putation. The feature select module selects features from
queues based on the current delay time. The dual flow per-
ception module generates object moving trends based on
input features.
moving trends and detect future frames without addi-
tional latency by combining dynamic flow and static
flow. To advance this method, we use a multi-time-
step feature fusing system to create a delay adaptive
detector. The model can make a multi-time-step pre-
diction by following the feature queue and feature se-
lect module.
3.2 Feature Queue Module
The feature queue module stores extracted image fea-
tures in a featured queue of a fixed length. Features
are represented as F
t
, whereas t is the correspond-
ing time-step. The computational cost of saving old
image features is as same as StreamYOLO. The fea-
ture queue module continues to save features from
the four previous frames. Storing the previous fea-
ture prevents additional processing while occupying
little additional memory (100MB for each frame fea-
ture). This enables the model to use older time-step
features.
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
42

3.3 Delay Analyze
Preprocessing and inference time in time step t are de-
noted as P
t
and I
t
respectively. The inter-frame time
between input frames is denoted by the symbol T
t
.
The delay trend can be calculated by adding the most
recent inference delay and the current preprocessing
delay. The final delay trend D
t
is as follows:
D
t
= P
t
+ I
(t−1)
(1)
3.4 Feature Select Module
The feature select module chooses two time-step fea-
tures that best match the current delay trend. When
the delay trend is entered into the feature select mod-
ule, the target time-step n can be calculated using
Equation 2. The expected time-step is the delay trend
quotient over inter-frame time. The target time-step n
is the next time-step of the division result.
n =
D
t
T
t
+ 1 (2)
In the feature select module, features for the re-
quired time step are extracted as the equation below.
FSM([F
t
: F
(t−4)
], D
t
) = (F
t
, F
(t−n)
) (3)
If there is no last inference delay, the result of FSM
should be (F
t
, F
t−1
). If no suitable feature exists for
n, the nearest F should be chosen. In summary, the
proposed model calculates the time delay by combin-
ing the current preprocessing delay and the last infer-
ence delay. After determining the desired time-step
using Equation 2, the module chooses the stored fea-
tures using Equation 3. The DFP creates a dynamic
time-step object moving trend using the selected fea-
ture. The entire feature flow process is explained in
Figure 3.
4 EXPERIMENTS
4.1 Environment Settings
4.1.1 Dataset
Argoverse-HD (Chang et al., 2019) provides high-
resolution (1920x1080) and high-frame-rate driving
video image data (30FPS). The Argoverse-HD valida-
tion set contains 24 videos of 15 ∼ 30 seconds each,
totaling 15k image frames. Streaming perception (Li
et al., 2020) adds dense 2D annotations in MS COCO
(Lin et al., 2014) format.
Table 1: Delay analysis in various delay environments. All
delays are measured in milliseconds.
Environment
Mean
delay
Standard
deviation
Minimum
delay
Maximum
delay
Low
StreamYOLO 23.5 3.2 21.8 69.1
DADE(Ours) 24.1 3.66 21.9 66
Medium
StreamYOLO 40.1 9.35 22.3 86.8
DADE(Ours) 39.3 9.22 22.3 88
High
StreamYOLO 63 12.5 41.7 121
DADE(Ours) 63.1 12.7 41.3 124
4.1.2 Streaming AP
Streaming AP (Li et al., 2020) is used in the evalu-
ation of experiments. During evaluation, the model
updates the output buffer with its latest prediction of
the current state of the world. At the same time, the
benchmark constantly queries the output buffer for es-
timates of world states. So, output will be evaluated
with the current ground truth frame in world state. To
AP metric from COCO (Lin et al., 2014), sAP eval-
uates the average mAP over intersection-over-union
(IoU) thresholds at 0.5 and 0.75. sAP
S
, sAP
M
, and
sAP
L
denote sAP for object size.
4.1.3 Platforms
Each experiment in this study was run on an RTX
3070Ti GPU (8GB VRAM, TDP 80W), an Intel
12700 H CPU, and 16 GB RAM. Pytorch 1.7.1 with
CUDA 11.4 was used in the software environment.
4.1.4 Delay
To change mean delay time, we deployed multi-
ple DaDe model on single environment. Table 1
shows various delay environments (Low, Medium,
and High) by running up to 3 models in parallel. Inter-
frame space is 33ms at 30FPS, so processing time
should be less than 33ms to maintain real-time per-
formance. In a low delay environment, the average
delay is 24ms, so StreamYOLO and DaDe can pro-
cess each frame before the next frame arrives. In
a medium delay environment, the average delay is
40ms, after which some frames fail to meet real-time
performance. As a result, their evaluation is based
on frame(t + 2) rather than frame(t + 1). The mean
delay time in a high delay environment is more than
60ms, so the difference between the assumed future
frame and the real environment increases in the base-
line. Figure 4 shows the processing delay distribu-
tion in each delay environment. A vertical dotted
DaDe: Delay-Adaptive Detector for Streaming Perception
43

Figure 4: Visualization of delay distribution for various
delay environments. Distribution gradually spreads as the
mean delay lengthens.
line shows inter-frame spaces at 30 frames per sec-
ond (FPS). Frames in each inter-frame space should
produce corresponding time-step results.
4.2 Results
Table 2 shows the results of streaming perception
methods. The performance is the same as in a low-
delay environment between baseline (StreamYOLO)
and ours (DaDe). Standard YOLOX suffers from a
significant performance drop in the absence of future
prediction. The baseline fails to follow the trend of fu-
ture frames as the mean delay increases and the frame
begins to fail to finish processing before the next
frame arrives. In high-delay conditions, all frames
fail to detect in real-time, increasing the gap between
the baseline and the suggested method. As shown
in Table 2, a 1.5% improvement in sAP is achieved
compared to the baseline in a high delay environment.
Table 2: Performance of each method in Argoverse-HD
dataset. YOLOX is the standard real-time detector.
Method sAP sAP
L
sAP
M
sAP
S
sAP
50
sAP
75
Low (mean delay: 24 ± 1ms)
YOLOX 31.7 52.3 29.7 12.5 54.8 30.1
StreamYOLO 36.7 63.8 37.0 14.6 57.9 37.2
DADE(Ours) 36.7 63.9 36.9 14.6 57.9 37.3
Medium (mean delay: 39 ± 1ms)
YOLOX 23.0 40.0 21.3 6.1 45.5 21.1
StreamYOLO 29.1 48.1 27.4 9.5 51.6 27.7
DADE(Ours) 29.8 50.1 28.3 10.8 52.5 28.4
High (mean delay: 63 ± 1ms)
YOLOX 19.2 31.2 15.5 5.1 38.8 16.3
StreamYOLO 25.7 40.2 23.9 8.6 47.3 23.7
DADE(Ours) 27.2 41.5 26.1 9.5 48.2 25.9
Figure 5 shows the visualization of each method in a
high delay environment. Ours outperforms others in
various conditions and scenarios.
5 CONCLUSIONS
This study proposes a simple but effective method for
detecting objects in real time. Multi-time-step predic-
tion can be performed using the feature queue mod-
ule and feature select module without any additional
computation. It achieved state-of-the-art performance
in a delayed environment. Furthermore, real-time
feature operation in DaDe can significantly improve
the performance of other real-world object detection
tasks. Predicting the appropriate time step can signif-
icantly improve their localization accuracy. For fur-
ther research, only one time-step feature is considered
in our method to generate the object’s moving trend.
Accuracy can be improved if each time-step feature is
considered within a reasonable computation cost.
REFERENCES
Bergmann, P., Meinhardt, T., and Leal-Taixé, L. (2019).
Tracking without bells and whistles. In 2019
IEEE/CVF International Conference on Computer Vi-
sion, ICCV 2019, Seoul, Korea (South), October 27 -
November 2, 2019, pages 941–951. IEEE.
Bhattacharyya, A., Fritz, M., and Schiele, B. (2019).
Bayesian prediction of future street scenes using syn-
thetic likelihoods. In 7th International Conference on
Learning Representations, ICLR 2019, New Orleans,
LA, USA, May 6-9, 2019. OpenReview.net.
Boddy, M. S. and Dean, T. L. (1994). Deliberation schedul-
ing for problem solving in time-constrained environ-
ments. Artif. Intell., 67(2):245–285.
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
44
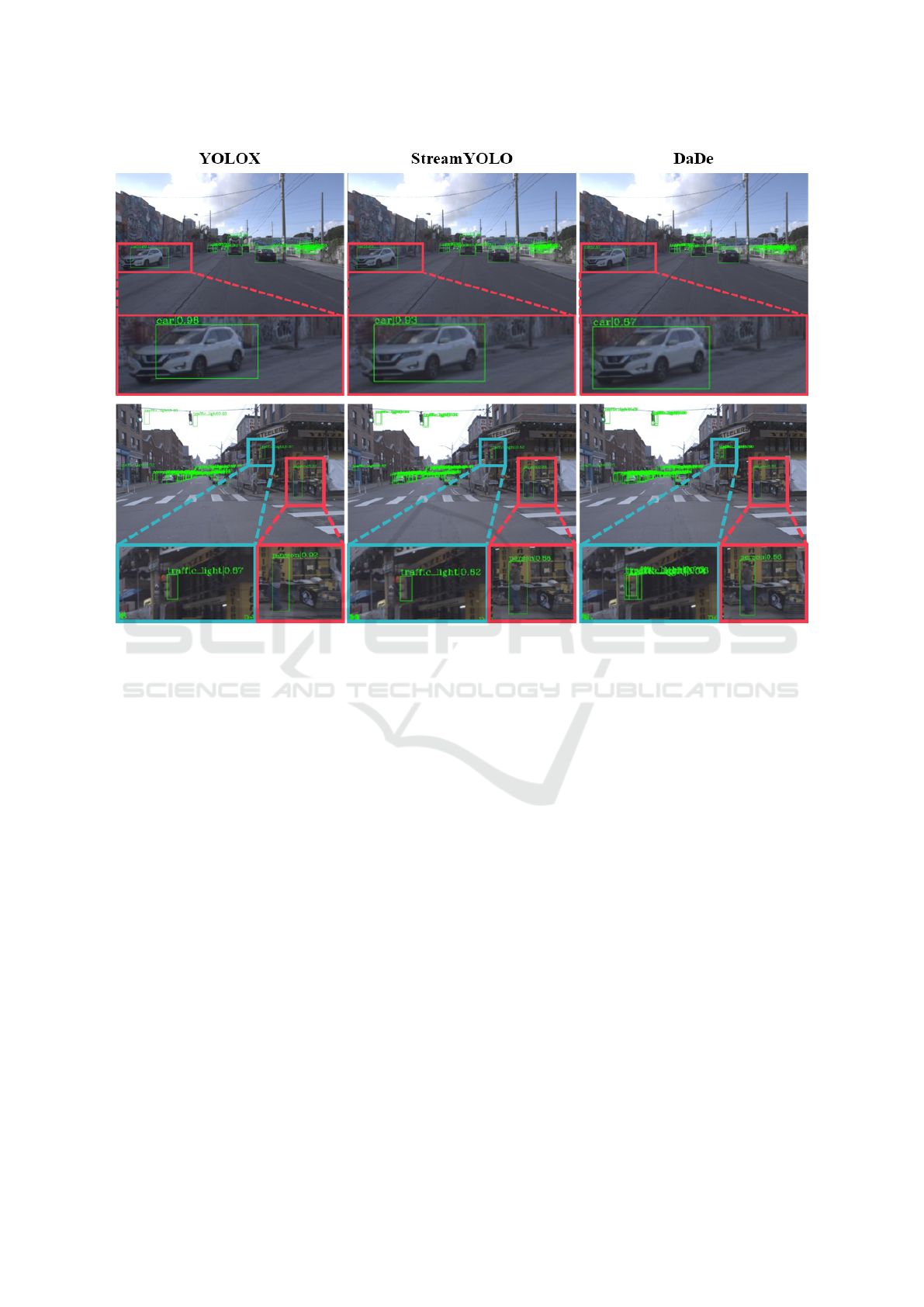
Figure 5: Qualitative analysis of results. Detection is conducted in a streaming environment with a high delay. DaDe can
successfully predict the future environment by forming object-moving trends. It achieves better results not only for moving
objects (top row) but also for detecting objects during ego-vehicle turns (bottom row).
Cai, Z. and Vasconcelos, N. (2018). Cascade R-CNN: delv-
ing into high quality object detection. In 2018 IEEE
Conference on Computer Vision and Pattern Recogni-
tion, CVPR 2018, Salt Lake City, UT, USA, June 18-
22, 2018, pages 6154–6162. Computer Vision Foun-
dation / IEEE Computer Society.
Chaabane, M., Trabelsi, A., Blanchard, N., and Beveridge,
J. R. (2020). Looking ahead: Anticipating pedestrians
crossing with future frames prediction. In IEEE Win-
ter Conference on Applications of Computer Vision,
WACV 2020, Snowmass Village, CO, USA, March 1-
5, 2020, pages 2286–2295. IEEE.
Chang, M., Lambert, J., Sangkloy, P., Singh, J., Bak, S.,
Hartnett, A., Wang, D., Carr, P., Lucey, S., Ramanan,
D., and Hays, J. (2019). Argoverse: 3d tracking
and forecasting with rich maps. In IEEE Conference
on Computer Vision and Pattern Recognition, CVPR
2019, Long Beach, CA, USA, June 16-20, 2019, pages
8748–8757. Computer Vision Foundation / IEEE.
Chang, Z., Zhang, X., Wang, S., Ma, S., Ye, Y., Xin-
guang, X., and Gao, W. (2021). MAU: A motion-
aware unit for video prediction and beyond. In Ran-
zato, M., Beygelzimer, A., Dauphin, Y. N., Liang,
P., and Vaughan, J. W., editors, Advances in Neural
Information Processing Systems 34: Annual Confer-
ence on Neural Information Processing Systems 2021,
NeurIPS 2021, December 6-14, 2021, virtual, pages
26950–26962.
Chen, X., Ma, H., Wan, J., Li, B., and Xia, T. (2016). Multi-
view 3d object detection network for autonomous
driving.
Chen, Y., Cao, Y., Hu, H., and Wang, L. (2020). Memory
enhanced global-local aggregation for video object
detection. In 2020 IEEE/CVF Conference on Com-
puter Vision and Pattern Recognition, CVPR 2020,
Seattle, WA, USA, June 13-19, 2020, pages 10334–
10343. Computer Vision Foundation / IEEE.
Deng, J., Pan, Y., Yao, T., Zhou, W., Li, H., and Mei, T.
(2019). Relation distillation networks for video object
detection. In 2019 IEEE/CVF International Confer-
ence on Computer Vision, ICCV 2019, Seoul, Korea
(South), October 27 - November 2, 2019, pages 7022–
7031. IEEE.
Ge, Z., Liu, S., Wang, F., Li, Z., and Sun, J. (2021).
YOLOX: exceeding YOLO series in 2021. CoRR,
abs/2107.08430.
Girshick, R. B. (2015). Fast R-CNN. CoRR,
abs/1504.08083.
Girshick, R. B., Donahue, J., Darrell, T., and Malik, J.
(2013). Rich feature hierarchies for accurate ob-
DaDe: Delay-Adaptive Detector for Streaming Perception
45

ject detection and semantic segmentation. CoRR,
abs/1311.2524.
He, K., Gkioxari, G., Dollár, P., and Girshick, R. B. (2017).
Mask R-CNN. In IEEE International Conference on
Computer Vision, ICCV 2017, Venice, Italy, October
22-29, 2017, pages 2980–2988. IEEE Computer Soci-
ety.
Jin, B., Hu, Y., Tang, Q., Niu, J., Shi, Z., Han, Y., and Li, X.
(2020). Exploring spatial-temporal multi-frequency
analysis for high-fidelity and temporal-consistency
video prediction. In 2020 IEEE/CVF Conference
on Computer Vision and Pattern Recognition, CVPR
2020, Seattle, WA, USA, June 13-19, 2020, pages
4553–4562. Computer Vision Foundation / IEEE.
Lee, S., Kim, H. G., Choi, D. H., Kim, H., and Ro, Y. M.
(2021). Video prediction recalling long-term motion
context via memory alignment learning. In IEEE Con-
ference on Computer Vision and Pattern Recognition,
CVPR 2021, virtual, June 19-25, 2021, pages 3054–
3063. Computer Vision Foundation / IEEE.
Li, M., Wang, Y., and Ramanan, D. (2020). Towards
streaming perception. In Vedaldi, A., Bischof, H.,
Brox, T., and Frahm, J., editors, Computer Vision -
ECCV 2020 - 16th European Conference, Glasgow,
UK, August 23-28, 2020, Proceedings, Part II, volume
12347 of Lecture Notes in Computer Science, pages
473–488. Springer.
Li, Z., Wang, W., Li, H., Xie, E., Sima, C., Lu, T.,
Qiao, Y., and Dai, J. (2022). Bevformer: Learning
bird’s-eye-view representation from multi-camera im-
ages via spatiotemporal transformers. arXiv preprint
arXiv:2203.17270.
Lin, T., Dollár, P., Girshick, R. B., He, K., Hariharan, B.,
and Belongie, S. J. (2016). Feature pyramid networks
for object detection. CoRR, abs/1612.03144.
Lin, T., Goyal, P., Girshick, R. B., He, K., and Dollár, P.
(2017). Focal loss for dense object detection. CoRR,
abs/1708.02002.
Lin, T., Maire, M., Belongie, S. J., Bourdev, L. D., Girshick,
R. B., Hays, J., Perona, P., Ramanan, D., Dollár, P.,
and Zitnick, C. L. (2014). Microsoft COCO: common
objects in context. CoRR, abs/1405.0312.
Liu, Z., Tang, H., Amini, A., Yang, X., Mao, H., Rus, D.,
and Han, S. (2022). Bevfusion: Multi-task multi-
sensor fusion with unified bird’s-eye view represen-
tation. arXiv.
Lobanov, M. and Sholomov, D. (2021). Application of
shared backbone dnns in adas perception systems.
Proceedings of SPIE - The International Society for
Optical Engineering, 11605.
Luc, P., Neverova, N., Couprie, C., Verbeek, J., and LeCun,
Y. (2017). Predicting deeper into the future of seman-
tic segmentation. In IEEE International Conference
on Computer Vision, ICCV 2017, Venice, Italy, Oc-
tober 22-29, 2017, pages 648–657. IEEE Computer
Society.
Ma, Y., Liu, S., Li, Z., and Sun, J. (2021). Iqdet: Instance-
wise quality distribution sampling for object detec-
tion. In IEEE Conference on Computer Vision and
Pattern Recognition, CVPR 2021, virtual, June 19-25,
2021, pages 1717–1725. Computer Vision Foundation
/ IEEE.
Ramachandran, P., Zoph, B., and Le, Q. V. (2017). Search-
ing for activation functions. CoRR, abs/1710.05941.
Redmon, J. and Farhadi, A. (2018). Yolov3: An incremental
improvement. arXiv.
Wang, Y., Guizilini, V., Zhang, T., Wang, Y., Zhao, H.,
and Solomon, J. (2021). DETR3D: 3d object de-
tection from multi-view images via 3d-to-2d queries.
In Faust, A., Hsu, D., and Neumann, G., editors,
Conference on Robot Learning, 8-11 November 2021,
London, UK, volume 164 of Proceedings of Machine
Learning Research, pages 180–191. PMLR.
Wang, Y., Wu, J., Long, M., and Tenenbaum, J. B. (2020).
Probabilistic video prediction from noisy data with a
posterior confidence. In 2020 IEEE/CVF Conference
on Computer Vision and Pattern Recognition, CVPR
2020, Seattle, WA, USA, June 13-19, 2020, pages
10827–10836. Computer Vision Foundation / IEEE.
Yang, J., Liu, S., Li, Z., Li, X., and Sun, J. (2022). Real-time
object detection for streaming perception. In Proceed-
ings of the IEEE/CVF Conference on Computer Vision
and Pattern Recognition (CVPR), pages 5385–5395.
Zhu, X., Wang, Y., Dai, J., Yuan, L., and Wei, Y. (2017).
Flow-guided feature aggregation for video object de-
tection. In IEEE International Conference on Com-
puter Vision, ICCV 2017, Venice, Italy, October 22-
29, 2017, pages 408–417. IEEE Computer Society.
Zilberstein, S. (1996). Using anytime algorithms in intelli-
gent systems. AI Mag., 17(3):73–83.
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
46
