
A Model-agnostic Approach for Generating Saliency Maps to Explain
Inferred Decisions of Deep Learning Models
Savvas Karatsiolis
1a
and Andreas Kamilaris
1,2 b
1
CYENS Centre of Excellence, Nicosia, Cyprus
2
University of Twente, Department of Computer Science, Enschede, Netherlands
Keywords: Saliency Map, Neural Networks, Activation Map, Model-Agnostic Approach.
Abstract: The widespread use of black-box AI models has raised the need for algorithms and methods that explain the
decisions made by these models. In recent years, the AI research community is increasingly interested in
models’ explainability since black-box models take over more and more complicated and challenging tasks.
In the direction of understanding the inference process of deep learning models, many methods that provide
human comprehensible evidence for the decisions of AI models have been developed, with the vast majority
relying their operation on having access to the internal architecture and parameters of these models (e.g., the
weights of neural networks). We propose a model-agnostic method for generating saliency maps that has
access only to the output of the model and does not require additional information such as gradients. We use
Differential Evolution (DE) to identify which image pixels are the most influential in a model’s decision-
making process and produce class activation maps (CAMs) whose quality is comparable to the quality of
CAMs created with model-specific algorithms. DE-CAM achieves good performance without requiring
access to the internal details of the model’s architecture at the cost of more computational complexity.
1 INTRODUCTION
In recent years, Artificial Intelligence (AI) has been
undertaking or facilitating many technological
applications in almost every field of modern society:
healthcare, industrial automation and manufacturing,
logistics and retail, policy-making and marketing. AI
technologies have such a huge impact on the
economy and our societies that AI has been called the
“new electricity” (Catherine Jewell, 2019). AI is
expected to transform every industry and create huge
economic value in the following years. Regardless of
AI’s impressive performance in decision-making and
problem-solving, which some years ago seemed very
difficult for machines to achieve, the AI models
designed for probabilistic inference have highly
complex architectures while their internal mechanics
are hidden behind an overwhelming number of
calculations. Such models are often built with deep
learning (DL) methodologies or ensembles based on
methods like bagging or boosting. Because of the
difficulty to understand the logic behind the decisions
a
https://orcid.org/0000-0002-4034-7709
b
https://orcid.org/0000-0002-8484-4256
made during inference, these models are often
referred to as “black-box models” (Guidotti et al.,
2019; Innerarity, 2021), characterized as non-
transparent entities that can only be probed to provide
output for specific input.
The lack of models’ explainability is a compound
and significant problem in AI as it is not just related
to the absence of supporting evidence for their
decisions: model explainability can reveal biases
caused by flawed training data and can identify
possible ethical issues regarding the model’s
inference. Model biases constitute a major problem in
AI and may render a system useless or societally
disapproved because of ethical and practical
concerns. For example, an algorithm used in United
States hospitals to predict which patients would likely
need extra medical care, heavily favored white
patients over black patients (Obermeyer and
Mullainathan, 2019) and it was withdrawn until the
problem was fixed. Another example is an algorithm
used by Amazon for facilitating personnel hiring and
it was greatly favouring men over women (Maude
Karatsiolis, S. and Kamilaris, A.
A Model-agnostic Approach for Generating Saliency Maps to Explain Inferred Decisions of Deep Learning Models.
DOI: 10.5220/0011612400003417
In Proceedings of the 18th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theor y and Applications (VISIGRAPP 2023) - Volume 4: VISAPP, pages
39-46
ISBN: 978-989-758-634-7; ISSN: 2184-4321
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
39

Lavanchy, 2018; The Guardian, 2018). Such
discriminative functionality could be identified and
resolved before the algorithms reached the production
phase if model explainability was studied during the
development process. Model explainability is also
extremely significant for models that facilitate or
fully undertake a medical diagnosis. Any AI decision
that influences the life of a patient and her family
should be supported by evidence and convincingly
explained to the doctors that will adopt the machine’s
decision or ask/perform further tests. Besides the
ethical biases revealed by algorithms that explain the
models’ decisions, such algorithms can also reveal
biases in the training data that prevent the model from
learning suitable features. For example, Freitas
(Freitas, 2013) builds his argument upon the amount
of bias that data may introduce to a model, based on
a neural network application failure story that is not
necessarily real: a neural network was trained to
discriminate between friendly and enemy tanks.
While its performance was very good on the test set,
it had a very bad performance when tested in the field.
Later, it was discovered that most enemy tank images
were taken on cloudy days while most friendly tank
images were taken on sunny days. The model learned
to discriminate between sunny and cloudy days
instead of focusing on the tank types. A similar
situation is described by Ribeiro et al (Ribeiro, Singh
and Guestrin, 2016), where a classifier discriminating
between wolves and husky dogs relied solely on the
snowy background to identify a wolf.
The extended use of AI algorithms in many fields
raised the European Parliament’s concerns regarding
privacy rights and the conservation of customers’
private information by companies. Specifically, in
2018, a set of new clauses were introduced to the
General Data Protection Regulation (GDPR)
(European Parliament, 2018) to ensure the civilians’
right to meaningful explanations of the logic involved
in automated decision-making. Meanwhile, the High-
Level Expert Group on AI published the ethics
guidelines for trustworthy AI in 2019 (High-Level
Expert Group on AI, 2019). Explaining the decisions
of AI models is crucial for preventing unethical use,
avoiding discriminative decision-making, and
preventing models’ failure to perform as expected
because of inappropriate training data. It is also
crucial for making a sustainable and beneficial
transition to an AI era where machines will take over
critical decision-making that currently requires a lot
of effort by human experts.
In this paper, we focus solely on explaining the
decisions of AI models that process images (computer
vision DL models). The most popular explanation
mean in computer vision is saliency maps (SMs). A
saliency map is an image having a width and a height
equal to the dimensions of the images used as input to
the model. The brightness of each pixel in the SM
represents how salient the pixel is: the brighter a pixel
is, the more its contribution to the decision of the
model.
There is a plethora of algorithms that generate
SMs to explain the AI models’ decisions. These
algorithms are categorized as model-specific or
model-agnostic, depending on whether they need
information sourced from the model parameters or
not. This information is either in the form of gradients
flowing from the output towards a specific layer (that
could be the input layer) or the activations of an
intermediate model layer or both. The model-specific
algorithms require such information to quantify the
sensitivity of the model’s output to a specific pixel at
the input. On the contrary, model-agnostic algorithms
do not need any further information besides the scores
at the output of the model for some specific input.
Model-agnostic algorithms provide actual black-box
explainability because they require no interaction
with the model besides inference.
This paper proposes a model-agnostic method for
generating SMs that has access only to the output of
the model and does not require additional information
such as gradients. We use Differential Evolution (DE)
to identify which image pixels are the most influential
in a model’s decision-making process and we call this
method DE-CAM. The rest of the paper describes the
DE-CAM technique (Sections 3 and 4) after
presenting related work in the field (Section 2).
2 RELATED WORK
As mentioned above, the algorithms that generate
SMs to explain the AI models’ decisions are
categorized as model-specific or model-agnostic
.
2.1 Model-specific Algorithms
The most popular model-specific algorithms for
generating SMs are GradCAM (Selvaraju et al.,
2020), GradCAM++ (Chattopadhyay et al., 2018),
Integrated Gradient (Sundararajan, Taly and Yan,
2017) and Full-Gradient (Srinivas and Fleuret, 2019).
We provide a brief description of each algorithm
below.
GradCAM: uses gradient information from the
last convolutional layer of the model to attribute
saliency to each input pixel. As convolutional layers
retain spatial information, the feature map of the last
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
40

convolutional layer provides a link between the high-
level semantics of the input image and their spatial
information. GradCam computes the gradient of a
particular class with respect to the activations of the
last convolutional layer and then the low-resolution
heatmap is calculated by summing the feature maps
after being scaled by their respective gradient. The
final saliency map (having the same dimensions as
the input image) is obtained by upsampling the low-
resolution heatmap. GradCAM is a popular choice for
computing SMs because it performs decently,
requires no hyperparameter tuning, and is fast and
simple to implement.
GradCAM++: is an extension of GradCAM and
uses a weighted combination of the positive partial
derivatives of the last convolutional layer feature
maps with respect to a specific class score. This
approach improves GradCAM, especially in the case
when multiple objects of the selected class are present
in the image, a case that may cause problems for
GradCAM because it tends to underestimate object
representations that appear fewer times in the feature
maps than others.
Integrated Gradient: uses the integral of
gradients with respect to inputs along the path from a
given baseline (image consisting of pixels heaving
either zero or max value) to input. Integrated Gradient
relies on two fundamental axioms: sensitivity and
implementation invariance (Sundararajan, Taly and
Yan, 2017). A problem with this method is that the
choice of the baseline (black or white image) may
cause performance issues during explainability
(Erion et al., 2019).
FullGradient: aggregates layer-wise gradient
maps multiplied by the bias terms. FullGradient
provides attributions to both the input and the neurons
of intermediate layers which allows the method to
satisfy two key properties: completeness and weak
dependence (Srinivas and Fleuret, 2019).
(Kindermans et al., 2019) and (Adebayo et al.,
2018) argue that gradient-based methods are exposed
to several problems that render them unreliable, with
the saturating gradients problem being the most
profound one.
2.2 Model-agnostic Algorithms
Model-agnostic algorithms do not suffer from the
limitations of model-specific algorithms as
mentioned above. The most popular model-agnostic
algorithms for generating SMs are LIME (Ribeiro,
Singh and Guestrin, 2016) and RISE (Petsiuk, Das
and Saenko, 2018).
LIME: achieves interpretability by training an
interpretable surrogate model, such as a linear model.
The training points of the surrogate model are
comprised of model evaluations of sampled data
points around a specified input example. Practically,
LIME learns an interpretable model by focusing
locally around the prediction. LIME often does not
work out of the box, especially for small-resolution
images, while its parameters need significant fine-
tuning (Bodria et al., 2021).
RISE: operates solely on the input of the model
to assign saliency to the input image pixels. It
generates 𝑁 random masks with values sampled from
a Gaussian distribution. These masks are multiplied
with the image and the resulting images are fed to the
model. Then, a saliency map is obtained by linearly
combining the masks with the model predictions
corresponding to each masked input. The key idea is
that the masked inputs that contain significant pixels
for the task get a higher output when used for model
prediction. The quality of the results produced by this
method is much lower than the quality of the results
of gradient-based methods; often the saliency maps
produced are not interpretable.
For an extensive survey on various explanation
methods, the readers are referred to (Bodria et al.,
2021). In this paper, we propose a model-agnostic
method called Differential Evolution CAM (DE-
CAM) that produces results that are comparable to
and in some cases better than the results of gradient-
based methods, without requiring any information
regarding the internal structure of the model. DE-
CAM combines the advantages of model-agnostic
and model-specific methods at the cost of
computational time required to run.
3 THE DE-CAM ALGORITHM
Our proposed method aims at creating an SM for a
certain image by identifying which pixels of the
image contribute the most to the identification of a
specific class. Instead of exploiting information
sourced from the architecture of the model (layer
activations, gradients, etc.), DE-CAM solves the
optimization problem of finding which set of pixels 𝑝
in image 𝑋 of height 𝐻 and width 𝑊 maximizes the
output of the model for a certain class while satisfying
|
𝑝
|
≪ |𝑊 𝐻|. Let 𝑀 be a 2-dimensional binary
mask of height 𝐻 and width 𝑊 and its element 𝑚
,
at coordinates 𝑖,𝑗 has a binary value, i.e., 𝑚
,
∈
0,1. Mask 𝑀 is multiplied with the input image 𝑋
to provide a modified image 𝑋′ such as 𝑋′ 𝑋⊙𝑀
A Model-agnostic Approach for Generating Saliency Maps to Explain Inferred Decisions of Deep Learning Models
41
that feeds the model producing a new output score for
a specific class. Since mask 𝑀 is 2-dimensional, each
element 𝑚
,
preserves or eliminates (i.e. by changing
to a zero value) all channels of a pixel in image 𝑋, at
the coordinates (i, j). DE-CAM solves the following
optimization problem:
𝑎𝑟𝑔𝑚𝑎𝑥
𝑓
𝑋 ⊙𝑀
𝛼
∑
,
|
∀∈
,
,∀∈,
(1)
where 𝛼 is the weight of the second term and 𝑓.
represents the model function without the softmax
layer (i.e., the logits’ values). The second term of the
objective function serves the requirement of
favouring masks that have a larger number of
eliminated pixels: SMs should attribute significance
only to the subset of the pixels that contribute the
most to the output of a specific class. Since SMs need
to be grayscaled (and not binary) images, the solution
obtained by DE-CAM (optimal binary mask 𝑀) is not
a valid SM. Thus, we apply a Monte Carlo approach
for obtaining the SM from a large set of binary masks
that are in the vicinity of the optimal solution: DE-
CAM computes hundreds of decent solutions to the
problem and combines them to obtain the SM.
Specifically, the final SM is the result of a process
during which each candidate solution assigns a score
to the pixels of the SM. Candidate solutions are
defined as the individuals of the evolutionary
algorithm at convergence time that have a fitness
greater than the mean population fitness.
DE-CAM uses Differential Evolution (DE) (Storn
and Price, 1997; Krink, Filipic and Fogel, 2004; Han
et al., 2021) to evolve a population of 𝑁 candidate
solutions to the optimization problem. DE is a good
fit for the specific optimization problem because it
can deal with real-valued problems, constantly
improving the general fitness of the population and
pushing the solutions towards search areas that tend
to provide high fitness values. This is important when
applying the Monte Carlo step to many feasible
solutions. We represent each individual (candidate
mask) in the population as a set of 𝐾 ellipses. Each
ellipse contains pixels with a value equal to 1 and thus
represents which image pixels are preserved after
masking the input image. Each ellipse is defined by
its left-most point and its right-most point of its
bounding box and its rotation such as
𝑥
,𝑦
,𝑥
,𝑦
,𝑟
. Ellipses defined with their top-left
and their bottom-right points only (without a rotation
angle) are aligned to the x-y axes, and they only differ
in their position in space and their size. Using a
rotational angle in the ellipses’ definition provides
infinite shape orientations that add the flexibility to
construct every possible combination of ellipses (and
mask shapes). This allows the algorithm to sustain
great mask diversity which is important for
eliminating or preserving various configurations of
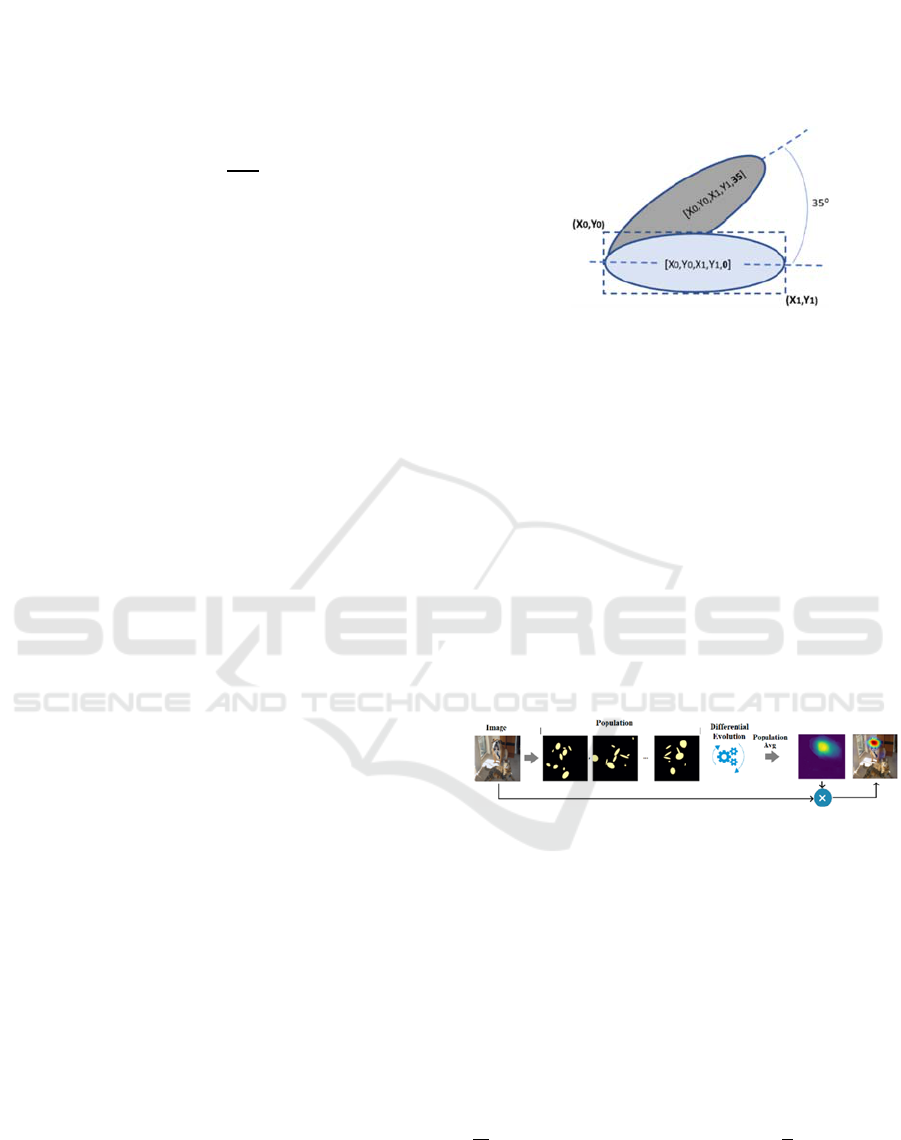
image pixels. Figure 1 shows how a single ellipse is
encoded to a “gene” by the evolutionary algorithm.
Figure 1: The encoding scheme of the evolutionary
algorithm: each ellipse of the 𝐾 ellipses contained in an
individual is defined by the top-left/bottom-right
coordinates of its containing bounding box and its rotational
angle. This definition allows the creation of 𝐾 ellipses per
individual that have different sizes and orientations and
their combination produces diverse masks. In this example,
the resulting mask spans the area of the two ellipses.
Since each individual consists of 𝐾 ellipses’
definitions, it has a total size of 𝐾5 genes. The
combination of the 𝐾 ellipses constitutes the mask
that selects which pixels from the image are preserved
and which are eliminated. The operation of the DE-
CAM is demonstrated in Figure 2 showing how DE-
CAM evolves a population of masks to solve the
optimization problem defined in Equation (1).
Figure 2: Candidate masks with 𝐾10 are manipulated
by the evolutionary algorithm of the DE-CAM. Each mask
contains 𝐾 ellipses of various sizes and orientations. In the
right-most mask, only 9 ellipses are visible because one
ellipse fully overlaps with another. The algorithm evolves a
population of masks and aims at computing masks that
identify the pixels of the image that contribute to the score
of the output class the most, while maintaining the number
of selected pixels as small as possible.
DE-CAM restrains the size of the ellipses
contained in the individuals during the evolutionary
process: the minimum distance between the
coordinates of the ellipses’ bounding boxes is set to
and the maximum distance is set to
, assuming a
square input image with 𝐻𝑊. Enforcing a
minimum distance prevents the use of very small
ellipses that are not useful, while enforcing a
maximum distance prevents the use of large ellipses
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
42

that can compromise the requirement of maintaining
only a fraction of the image pixels that are invaluable
to the model for achieving high output on the specific
class. The DE-CAM algorithm’s pseudocode is
shown in Algorithm 1. The values of the DE
algorithm’s hyperparameters, i.e., the Crossover
Probability (CR), the Differential Weight (F) and the
number of ellipses in every individual (K) were
determined experimentally by applying the DE-CAM
with various hyperparameters on different DL
models.
Algorithm 1: DE-CAM.
𝐶𝑅 0.2 , 𝐹 0.8, 𝐾 10, 𝑀𝑎𝑥𝐼𝑡𝑒𝑟 200 ,
Fitness = 𝑓
𝑋 ⊙𝑀
𝛼
∑
,
Initialize a population 𝑃 of 𝑁 solutions (individuals).
Each solution contains 𝐾 masks.
Repeat until 𝑀𝑎𝑥𝐼𝑡𝑒𝑟 is reached
Repeat for every individual 𝑥 in 𝑃
Randomly choose 3 different individuals 𝑎, 𝑏, 𝑐
Repeat for each gene (parameter) 𝑖 in 𝑥
With probability 𝐶𝑅 : 𝑥
𝑎
𝐹
𝑏
𝑐
else: 𝑥
𝑥
Clip the genes (parameters) of 𝑥′ to comply
with min/max size requirements
If 𝐹𝑖𝑡𝑛𝑒𝑠𝑠
𝑥
𝐹𝑖𝑡𝑛𝑒𝑠𝑠𝑥
replace 𝑥
with 𝑥
in 𝑃
SumMasks = Sum all 𝑥 in 𝑃 for which
𝐹𝑖𝑡𝑛𝑒𝑠𝑠
𝑥
𝑃𝑜𝑝𝑀𝑒𝑎𝑛𝐹𝑖𝑡𝑛𝑒𝑠𝑠
SM = SumMasks/MAX(SumMasks)
#score assignment
4 DE-CAM EVALUATION
We tested the DE-CAM on ImageNet (Deng et al.,
2009) classification explaining the decisions of three
popular models: VGG19 (Simonyan and Zisserman,
2015), ResNet50 (He et al., 2016) and MobileNetv2
(Sandler et al., 2018). A visual comparison of our
results for the VGG19 model with GradCAM,
FullGradient and Integrated Gradient is shown in
Figure 3. An analogous comparison is shown for
ResNet50 and the MobileNetv2 model in Figures 4
and 5. Considering all approaches listed in related
work (see Section 2), we decided to compare DE-
CAM with GradCAM, FullGradient and
IntegratedGradient, because these are the most
popular model-specific algorithms for explaining
models’ decisions. GradCAM++ could be a good
candidate for comparison as well, however,
GradCAM++ specializes in multi-object images
which was not the focus of this paper (see future
work, Section 5).
The results suggest that all methods tend to identify
similar areas as being important for the classification,
but the computed SMs occasionally exhibit some
subtle differences. For example, DE-CAM used on
the snail image with VGG19 (Figure 3, last row)
attributes more saliency to the shell of the snail and
less to its head and tentacles. DE-CAM also attributes
importance to the face of the person playing the violin
when used on the violin image with ResNet50 (Figure
4, 3
rd
row) while other methods concentrate solely on
the violin. Finally, DE-CAM perceives the uniform of
the hockey player as the most important part of the
image while other methods also focus on the athlete’s
stick (Figure 5, 2
nd
row). In Figure 6 it is evident that
the SMs created for Mobilenetv2 by the other
methods attribute saliency to larger image regions
while DE-CAM’s SMs attribute importance to a
smaller number of pixels.
To evaluate the results, we employed the Insertion-
Deletion metrics (Petsiuk, Das and Saenko, 2018).
These metrics measure how the confidence of the
model changes when we delete or insert certain
features. To get the deletion metric we start from the
original image and iteratively mute pixels (i.e., we
make their value equal to zero) in the order of
importance score indicated by the SM. Analogously,
to get the insertion metric, we start from a blurred
image and start restoring the pixel values in the order
of importance score as provided by the SM. An SM’s
quality is reflected by exhibiting a small Area Under
Curve (AUC) for the deletion process and a large
AUC for the insertion process, which suggests that
the SM conveys reliable information regarding the
importance of the image pixels. Figure 6 shows
examples of the Insertion-Deletion evaluation for
several examples contained in Figures 3-5.
To get a single-value evaluation metric for
comparing the performance of each method, we
computed the mean difference between
𝐴𝑈𝐶
and 𝐴𝑈𝐶
for the SMs of 1K
images in the ImageNet test set, assuming that the
magnitude of 𝐷𝑖𝑓𝑓𝐴𝑈𝐶
∆𝐴𝑈𝐶
,𝐴𝑈𝐶
reflects the quality of
the computed SMs (we aim at very high 𝐴𝑈𝐶
and very small 𝐴𝑈𝐶
. We computed this
evaluation metric for each model studied and the
results are shown in Table 1.
Based on the Insertion-Deletion metrics, DE-
CAM surpasses the GradCAM and FullGradient
methods on the task of explaining the results of the
VGG19 and Mobilenetv2 models. However, it has a
A Model-agnostic Approach for Generating Saliency Maps to Explain Inferred Decisions of Deep Learning Models
43
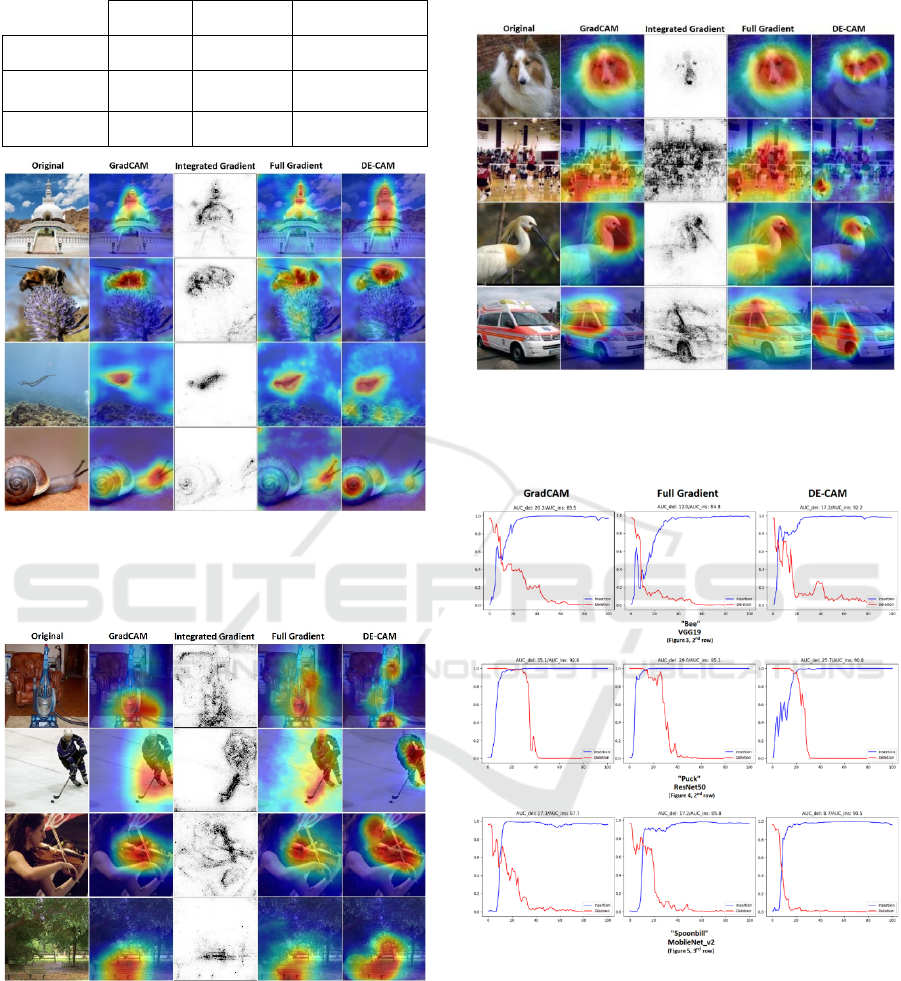
Table1: DiffAUC evaluation on ImageNet test set.
VGG19 ResNet50 MobileNet_v2
GradCAM 66.5 71.8 61.2
FullGrad 60.3 73.4
64.4
DE-CAM 66.8 70.5 64.6
Figure 3: SMs produced for the images shown in the left-
most column by various methods and DE-CAM with
VGG19. The classes of the images from top to bottom are
stupa, bee, sea snake and snail.
Figure 4: SMs produced for the images shown in the left-
most column by various methods and DE-CAM for
ResNet50. The classes of the images from top to bottom are
vacuum, puck, violin and park bench.
lower score than the other two methods when
computing SMs for the ResNet50 model. These
results are interesting because DE-CAM is a model-
agnostic method and does not use the gradients of the
model or any information regarding its architecture
and still its performance is comparable with the
performance of model-specific models.
Figure 5: SMs produced for the images shown in the left-
most column by various methods and DE-CAM for
Mobilenet_v2. From top to bottom: Shetland sheepdog,
volleyball, spoonbill and ambulance.
Figure 6: Evaluation of SMs shown in Figures 3-5 with the
Insertion-Deletion metrics. In each graph, the two curves
show how the classification changes by inserting/deleting
pixels. The x-axis shows the percentage of the pixels
inserted or deleted in the image and the y-axis shows the
classification score.
DE-CAM uses a DE algorithm to search for
candidate SMs which requires a lot of iterations and
classifications/assessments from the AI model to
compute the fitness function of each solution. For
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
44

example, DE-CAM’s computational complexity is
orders of magnitude higher than the computational
complexity of GradCAM. Being a model-agnostic
method, DE-CAM must make a great number of
attempts to discover the combinations of pixels that
are impactful on the score of a specific class.
However, the way the DE algorithm works allows for
execution in a multi-processing manner which can
reduce the execution time significantly. Furthermore,
computing the fitness function of the individuals of
the population can be done in large batches and in
parallel on multiple Graphical Processing Units
(GPUs). For the execution of DE-CAM, we used a
multi-processing implementation and two RTX3060
GPUs achieving execution times of 1 minute per run,
which is comparable to the execution time of
Integrated Gradient and a little higher than the
execution time of AblationCAM (Desai and
Ramaswamy, 2020).
5 CONCLUSIONS
This paper proposes the DE-CAM method, a model-
agnostic method for computing SMs for deep learning
models based on a differential evolution algorithm.
Through various experiments, we showed that DE-
CAM computes SMs of similar quality to model-
specific methods like GradCAM and FullGradient
without using any information about the architecture
and the inner mechanisms of the model whose
inference is trying to explain. Although DE-CAM has
a generally high computational complexity, the use of
multi-processing, parallel and large-batch model
inferences make it highly practicable for computing
SMs in the model-agnostic regime. In future work, we
plan to improve DE-CAM to be even more precise in
selecting the salient image pixels and introduce
mechanisms that enhance the ability of the algorithm
to deal with images that contain multiple objects of
the same class.
Funding: This project received funding from the
European Union’s Horizon 2020 Research and
Innovation Programme under Grant Agreement No.
739578 and the Government of the Republic of
Cyprus through the Deputy Ministry of Research,
Innovation and Digital Policy.
REFERENCES
Adebayo, J., Gilmer, J., Muelly, M., Goodfellow, I.J.,
Hardt, M. and Kim, B. (2018) ‘Sanity Checks for
Saliency Maps’, in S. Bengio, H.M. Wallach, H.
Larochelle, K. Grauman, N. Cesa-Bianchi, and R.
Garnett (eds) Advances in Neural Information
Processing Systems 31: Annual Conference on Neural
Information Processing Systems 2018, NeurIPS 2018,
December 3-8, 2018, Montréal, Canada, pp. 9525–
9536. Available at: https://proceedings.neurips.cc/
paper/2018/hash/294a8ed24b1ad22ec2e7efea049b873
7-Abstract.html.
Bodria, F., Giannotti, F., Guidotti, R., Naretto, F.,
Pedreschi, D. and Rinzivillo, S. (2021) ‘Benchmarking
and Survey of Explanation Methods for Black Box
Models’, CoRR, abs/2102.13076. Available at:
https://arxiv. org/abs/2102.13076.
Catherine Jewell (2019) WIPO Magazine, AI:the new
electricity. Available at: https://www.wipo.int/wipo_
magazine/en/2019/03/article_0001.html (Accessed: 8
August 2022).
Chattopadhyay, A., Sarkar, A., Howlader, P. and
Balasubramanian, V.N. (2018) ‘Grad-CAM++:
Generalized Gradient-Based Visual Explanations for
Deep Convolutional Networks’, in 2018 IEEE Winter
Conference on Applications of Computer
Vision, WACV 2018, Lake Tahoe, NV, USA, March 12-
15, 2018. IEEE Computer Society, pp. 839–847.
Available at: https://doi.org/10.1109/WACV.2018.
00097.
Deng, J., Dong, W., Socher, R., Li, L.-J., Li, K. and Fei-Fei,
L. (2009) ‘Imagenet: A large-scale hierarchical image
database’, in 2009 IEEE conference on computer vision
and pattern recognition, pp. 248–255.
Desai, S. and Ramaswamy, H.G. (2020) ‘Ablation-CAM:
Visual Explanations for Deep Convolutional Network
via Gradient-free Localization’, in IEEE Winter
Conference on Applications of Computer Vision,
WACV 2020, Snowmass Village, CO, USA, March 1-5,
2020. IEEE, pp. 972–980. Available at:
https://doi.org/10.1109/WACV45572.2020.9093360.
Erion, G.G., Janizek, J.D., Sturmfels, P., Lundberg, S.M.
and Lee, S.-I. (2019) ‘Learning Explainable Models
Using Attribution Priors’, CoRR, abs/1906.10670.
Available at: http://arxiv.org/abs/1906.10670.
European Parliament (2018) Data protection in the EU, The
General Data Protection Regulation (GDPR), the Data
Protection Law Enforcement Directive and other rules
concerning the protection of personal data. Available at:
https://ec.europa.eu/info/law/law-topic/data-protection/
data-protection-eu_en (Accessed: 8 August 2022).
Freitas, A.A. (2013) ‘Comprehensible classification
models: a position paper’, SIGKDD Explorations,
15(1), pp. 1–10. Available at: https://doi.org/10.1145/
2594473.2594475.
Guidotti, R., Monreale, A., Ruggieri, S., Turini, F.,
Giannotti, F. and Pedreschi, D. (2019) ‘A Survey of
Methods for Explaining Black Box Models’, ACM
Computing Surveys, 51(5), pp. 93:1–93:42. Available
at: https://doi.org/10.1145/3236009.
Han, Y., Peng, H., Jiang, A., Wang, C., Kong, F. and Li, M.
(2021) ‘A Differential Evolution Algorithm for Multi-
objective Mixed-Variable Optimization Problems’, in
L. Pan, Z. Cui, J. Cai, and L. Li (eds) Bio-Inspired
A Model-agnostic Approach for Generating Saliency Maps to Explain Inferred Decisions of Deep Learning Models
45

Computing: Theories and Applications - 16th
International Conference, BIC-TA 2021, Taiyuan,
China, December 17-19, 2021, Revised Selected
Papers, Part I. Springer (Communications in Computer
and Information Science), pp. 145–159. Available at:
https://doi.org/10.1007/978-981-19-1256-6_11.
He, K., Zhang, X., Ren, S. and Sun, J. (2016) ‘Deep
Residual Learning for Image Recognition’, in
Conference on Computer Vision and Pattern
Recognition (CVPR), pp. 770–778.
High-Level Expert Group on AI (2019) Ethics guidelines
for trustworthy AI. Available at: https://digital-
strategy.ec.europa.eu/en/library/ethics-guidelines-
trustworthy-ai (Accessed: 8 August 2022).
Innerarity, D. (2021) ‘Making the black box society
transparent’, AI and Society, 36(3), pp. 975–981.
Available at: https://doi.org/10.1007/s00146-020-
01130-8.
Kindermans, P.-J., Hooker, S., Adebayo, J., Alber, M.,
Schütt, K.T., Dähne, S., Erhan, D. and Kim, B. (2019)
‘The (Un)reliability of Saliency Methods’, in W. Samek,
G. Montavon, A. Vedaldi, L.K. Hansen, and K.-R.
Müller (eds) Explainable AI: Interpreting, Explaining
and Visualizing Deep Learning. Springer (Lecture Notes
in Computer Science), pp. 267–280. Available at:
https://doi.org/10.1007/978-3-030-28954-6_14.
Krink, T., Filipic, B. and Fogel, G.B. (2004) ‘Noisy
optimization problems - a particular challenge for
differential evolution?’, in Proceedings of the IEEE
Congress on Evolutionary Computation, CEC 2004,
19-23 June 2004, Portland, OR, USA. IEEE, pp. 332–
339. Available at: https://doi.org/10.1109/CEC.
2004.1330876.
Maude Lavanchy (2018) Amazon’s sexist hiring algorithm
could still be better than a human. Expecting algorithms
to perform perfectly might be asking too much of
ourselves. Available at: https://www.imd.org/research-
knowledge/articles/amazons-sexist-hiring-algorithm-
could-still-be-better-than-a-human/ (Accessed: 8 August
2022).
Obermeyer, Z. and Mullainathan, S. (2019) ‘Dissecting
Racial Bias in an Algorithm that Guides Health
Decisions for 70 Million People’, in danah boyd and
J.H. Morgenstern (eds) Proceedings of the Conference
on Fairness, Accountability, and Transparency,
Atlanta, GA, USA, January 29-31, 2019. ACM,
p. 89. Available at: https://doi.org/10.1145/3287560.
3287593.
Petsiuk, V., Das, A. and Saenko, K. (2018) ‘RISE:
Randomized Input Sampling for Explanation of Black-
box Models’, in British Machine Vision Conference
2018, BMVC 2018, Newcastle, UK, September 3-6,
2018. BMVA Press, p. 151. Available at: http://
bmvc2018.org/contents/papers/1064.pdf.
Ribeiro, M.T., Singh, S. and Guestrin, C. (2016) ‘“Why
Should I Trust You?”: Explaining the Predictions of
Any Classifier’, in B. Krishnapuram, M. Shah, A.J.
Smola, C.C. Aggarwal, D. Shen, and R. Rastogi (eds)
Proceedings of the 22nd ACM SIGKDD International
Conference on Knowledge Discovery and Data
Mining, San Francisco, CA, USA, August 13-17, 2016.
ACM, pp. 1135–1144. Available at: https://doi.org/
10.1145/2939672.2939778.
Sandler, M., Howard, A.G., Zhu, M., Zhmoginov, A. and
Chen, L.-C. (2018) ‘MobileNetV2: Inverted Residuals
and Linear Bottlenecks’, in 2018 IEEE Conference on
Computer Vision and Pattern Recognition, CVPR
2018, Salt Lake City, UT, USA, June 18-22, 2018.
Computer Vision Foundation / IEEE Computer Society,
pp. 4510–4520. Available at: https://doi.org/10.1109/
CVPR.2018.00474.
Selvaraju, R.R., Cogswell, M., Das, A., Vedantam, R.,
Parikh, D. and Batra, D. (2020) ‘Grad-CAM: Visual
Explanations from Deep Networks via Gradient-
Based Localization’, International Journal of
Computer Vision, 128(2), pp. 336–359. Available at:
https://doi.org/10.1007/s11263-019-01228-7.
Simonyan, K. and Zisserman, A. (2015) ‘Very Deep
Convolutional Networks for Large-Scale Image
Recognition’, in Y. Bengio and Y. LeCun (eds) 3rd
International Conference on Learning Representations,
ICLR 2015, San Diego, CA, USA, May 7-9, 2015,
Conference Track Proceedings.
Srinivas, S. and Fleuret, F. (2019) ‘Full-Gradient
Representation for Neural Network Visualization’, in
H.M. Wallach, H. Larochelle, A. Beygelzimer, F.
d’Alché-Buc, E.B. Fox, and R. Garnett (eds) Advances
in Neural Information Processing Systems 32: Annual
Conference on Neural Information Processing Systems
2019, NeurIPS 2019, December 8-14, 2019,
Vancouver, BC, Canada, pp. 4126–4135. Available at:
https://proceedings.neurips.cc/paper/2019/hash/80537
a945c7aaa788ccfcdf1b99b5d8f-Abstract.html.
Storn, R. and Price, K. v (1997) ‘Differential Evolution - A
Simple and Efficient Heuristic for global Optimization
over Continuous Spaces’, J. Glob. Optim., 11(4), pp.
341–359. Available at: https://doi.org/10.1023/A:
1008202821328.
Sundararajan, M., Taly, A. and Yan, Q. (2017) ‘Axiomatic
Attribution for Deep Networks’, in D. Precup and Y.W.
Teh (eds) Proceedings of the 34th International
Conference on Machine Learning, ICML 2017, Sydney,
NSW, Australia, 6-11 August 2017. PMLR (Proceedings
of Machine Learning Research), pp. 3319–
3328. Available at: http://proceedings.mlr.press/v70/
sundararajan17a.html.
The Guardian (2018) Amazon ditched AI recruiting tool
that favored men for technical jobs. Available at:
https://www.theguardian.com/technology/2018/oct/10/
amazon-hiring-ai-gender-bias-recruiting-engine
(Accessed: 8 August 2022).
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
46
