
Robust Path Planning in the Wild for Automatic Look-Ahead Camera
Control
Sander R. Klomp
1,2 a
and Peter H. N. de With
1 b
1
Department of Electrical Engineering, Eindhoven University of Technology, Eindhoven, The Netherlands
2
ViNotion B.V., Eindhoven, The Netherlands
Keywords:
Semantic Segmentation, Deep Learning, Road Segmentation, Path Planning.
Abstract:
Finding potential driving paths on unstructured roads is a challenging problem for autonomous driving and
robotics applications. Although the rise of autonomous driving has resulted in massive public datasets, most
of these datasets focus on urban environments and feature almost exclusively paved roads. To circumvent
the problem of limited public datasets of unpaved roads, we combine seven public vehicle-mounted-camera
datasets with a very small private dataset and train a neural network to achieve accurate road segmentation on
almost any type of road. This trained network vastly outperforms networks trained on individual datasets when
validated on our unpaved road datasets, with only a minor performance reduction on the highly challenging
public WildDash dataset, which is mostly urban. Finally, we develop an algorithm to robustly transform these
road segmentations to road centerlines, used to automatically control a vehicle-mounted PTZ camera.
1 INTRODUCTION
Road segmentation and path planning are two essen-
tial components of autonomous driving systems. In
recent years, large performance gains over conven-
tional computer vision-based systems have been real-
ized using deep learning, allowing for self-driving ve-
hicles on most public roads. However, several corner
cases remain in which these well-established meth-
ods cause failures (Grigorescu et al., 2020), especially
when the perception part of the algorithm cannot seg-
ment the drivable surface correctly.
One of the cases where modern neural network-
based solutions struggle with path planning is on un-
structured roads, where a lack of lane markings can
confuse lane detection networks or networks that di-
rectly perform the path-planning task. This prob-
lem is exacerbated by the fact that the large public
datasets for autonomous driving focus on urban en-
vironments where most roads are structured, such as
BDD100k (Yu et al., 2020) and Cityscapes (Cordts
et al., 2016). The Mapillary Vistas (Neuhold et al.,
2017) and IDD datasets (Varma et al., 2019) include
some types of unstructured roads, but limit their vari-
ation to paved roads. For robust path planning in any
environment, we argue that unpaved roads, such as
a
https://orcid.org/0000-0002-0874-4720
b
https://orcid.org/0000-0002-7639-7716
sand, dirt or even just tire tracks, should be included
also.
This research focuses on developing a robust path-
planning system for any type of road. The road seg-
mentation is performed using a HRNetV2-W48 net-
work (Sun et al., 2019) trained on a combination
of eight different datasets, in order to maximize the
variation of learned road types. Additional post-
processing is introduced on the road segmentations
to further improve the robustness. Because existing
datasets are not annotated with paths, we fall back
to a conventional computer vision approach to per-
form the final path planning, which is consequently
based on the segmentation masks. Whereas most
of the algorithms in this paper can be also applied
to autonomous driving, the more specific use case
for which this work has been performed, is differ-
ent. Our main use case is a person-driven vehicle
with a mounted Pan-Tilt-Zoom (PTZ) camera, where
the camera view should automatically stay concen-
trated at the center of the road at a certain distance
in front of the vehicle, thereby actively following any
curves in the road. Several design decisions in the
path-planning algorithm are specific to this use case,
though most of the algorithms may also be applied
for collision avoidance. Some example outputs of the
algorithm are shown in Fig. 1.
Our contributions are summarized as follows.
1. We combine several urban and non-urban datasets
Klomp, S. and N. de With, P.
Robust Path Planning in the Wild for Automatic Look-Ahead Camera Control.
DOI: 10.5220/0011614200003417
In Proceedings of the 18th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2023) - Volume 4: VISAPP, pages
553-561
ISBN: 978-989-758-634-7; ISSN: 2184-4321
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
553
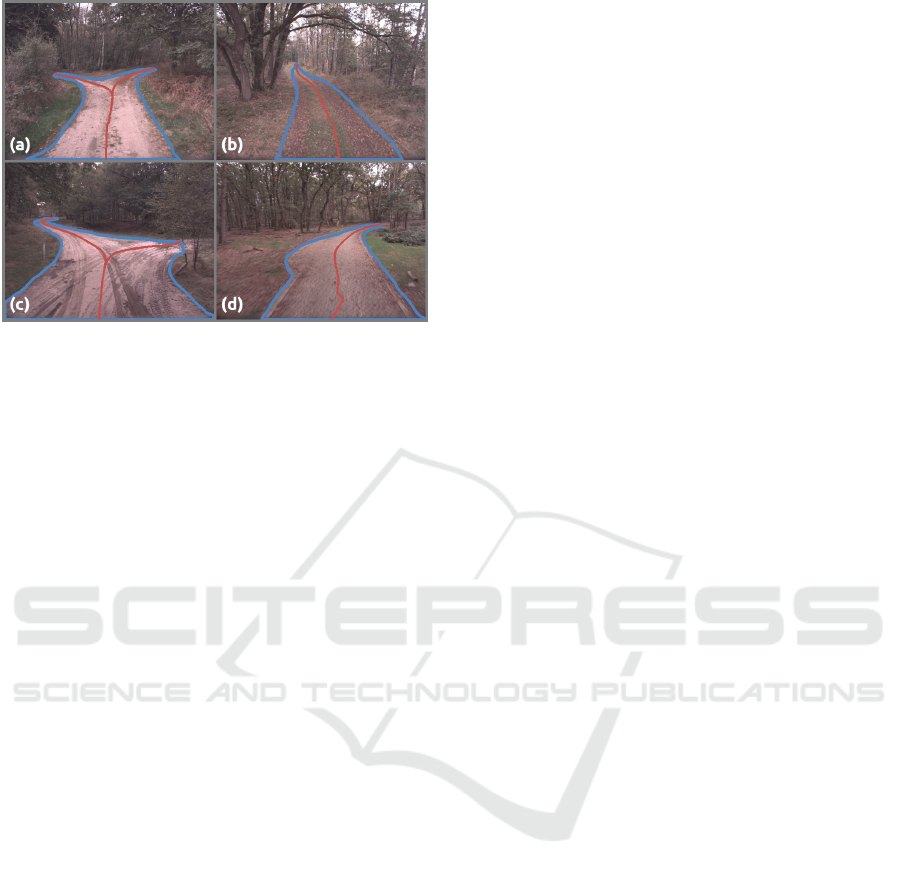
Figure 1: Pathfinding examples. Road segmentations are
outlined in blue, estimated centerlines in red.
into a diverse, new large dataset, to maximize the
robustness of a trained segmentation network, al-
lowing it to segment nearly any type of road.
2. A novel path-planning algorithm is developed that
transforms the road segmentation into road cen-
terlines, to be used to control a forward-looking
vehicle-mounted PTZ camera.
2 RELATED WORK
The path-planning system has related work in both
neural networks for semantic segmentation and gen-
eral path planning, which are discussed separately.
2.1 Semantic Segmentation
Early semantic segmentation research using neural
networks, such as the FCN (Shelhamer et al., 2016),
focused on general object segmentation. Since then,
two main improved architectures have become pop-
ular: the encoder-decoder structure with skip con-
nections, popularized by the U-net (Ronneberger
et al., 2015), and the structures that maintain high-
resolution features throughout the entire network,
such as HRNet (Sun et al., 2019). Both types of net-
works reach state-of-the-art performance on various
semantic segmentation datasets.
With the emerging application of autonomous
driving, more public driving segmentation datasets
have become available. These datasets include
Cityscapes (Cordts et al., 2016), IDD (Varma et al.,
2019), BDD100K (Yu et al., 2020) and Mapillary Vis-
tas (Neuhold et al., 2017), which all focus on segmen-
tation in urban environments.
Many works focus on achieving the highest pos-
sible accuracy on these public urban datasets, but
we are interested specifically in generalizing perfor-
mance on non-urban settings with unstructured roads.
Several works do focus on the detection of unstruc-
tured roads, such as (Nakagomi et al., 2021), (Ya-
dav et al., 2017), (Giusti et al., 2016), (Valada et al.,
2016), but they either require LIDAR (Nakagomi
et al., 2021), use heuristics that are sensitive to color
differences on the road such as shadows (Yadav et al.,
2017), or train on a small dataset with very little
road variation ((Giusti et al., 2016) and (Valada et al.,
2016)). Several datasets also exist containing natu-
ral or rural environments, such as YCOR (Maturana
et al., 2018), RUGD (Wigness et al., 2019), Freiburg
Forest (Valada et al., 2016) and Rellis-3D (Jiang et al.,
2020), but all of these datasets show little variety in
road types and environments. To our knowledge, nei-
ther a comprehensive dataset nor a robust road seg-
mentation method exists yet that yields an acceptable
performance on general unstructured road. Because
of this, our road segmentation will be performed by
training on a combination of the aforementioned un-
paved road datasets.
2.2 Path Planning
For regular autonomous driving, path planning gen-
erally consists of four steps: route planning, behav-
ioral decision-making, motion planning and vehicle
control (Paden et al., 2016). Considering that our
use case is only to control the camera viewing direc-
tion instead of automated driving of the entire vehicle,
most of these steps can be simplified or even omitted.
“Route planning” is somewhat relevant, because at in-
tersections, the system should choose the correct road
to follow. “Behavioral decision-making” is unneces-
sary, because the human driver determines the route
and the camera does not need to react in any way to
other road users. “Motion planning” involves deter-
mining the detailed path based on the current view of
the road, and is the primary focus of this work. “Ve-
hicle control”, which becomes camera control in our
case, is trivial: rotating a simple PTZ camera is much
simpler than steering a vehicle and does not require
complex vehicle models.
Motion planning can be performed in several
ways. The most straightforward methods are graph
search-based planners, such as the Dijkstra and A* al-
gorithms, although planners based on sampling such
as Rapidly-exploring Random Trees (RRT) are also
common (Gonz
´
alez et al., 2016). More complex
methods aim to either be faster to compute than A*,
allow for easier integration of other parameters such
as vehicle size, or provide smoother paths which en-
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
554

3.2.1 Road-Mask Processing
3.2.2 Path Planning
Preprocessing
Image inference
Class remapping
Dataset
expansion
Network
training
Connected-
component
filtering
Hole filling
Row-gap filling
Bird’s-eye view
transform
Close-range
filling
Start point
detection
End point(s)
detection
Path finding
Reverse bird’s-
eye transform
3.1 Road Segmentation
Multiple
Datasets
Train time only
Eind point(s)
filtering
3.2 Robust Path Planning
Figure 2: Flow chart of the path-planning system. Note that a poorly trained network is used deliberately for the segmentation
to highlight the effect of road-mask processing. Road path, start point and end point are shown in the right image.
able smoother vehicle control. For example, motion
planning can be performed far more efficiently using a
neural network (Qureshi et al., 2019), by teaching it to
imitate paths generated using RRT. This is especially
useful in high-dimensional spaces and not necessary
for our simple 2D path-planning case. To conclude,
we will perform path planning using the simple A* al-
gorithm, because it is sufficiently fast for our use case
and the additional features of more complex methods
are not necessary for camera control.
3 CREATING A ROBUST
PATH-PLANNING SYSTEM
The proposed method consists of three main compo-
nents, as shown in Fig. 2: semantic segmentation,
road-mask processing and path planning. For seman-
tic segmentation, the focus is on how to combine ex-
isting datasets and jointly train on them to achieve
strong generalization. During inference, the seman-
tic segmentation stage simply consists of executing
the network and mapping several classes to a road
mask. The road mask is then post-processed using
multiple conventional computer vision algorithms, to
ensure better pathfinding in the final stage. Pathfind-
ing itself employs the A* algorithm, although auto-
matically finding the correct start and end points for
that algorithm is not always straightforward. These
components are now further discussed in detail.
3.1 Road Segmentation: Multi-Dataset
Training for Improved Robustness
This section first briefly describes the employed
CNN and the applied training procedure, followed
by an overview of suitable datasets and the proposed
method for combining these datasets.
The base network that is employed for road seg-
mentation is the HRNetV2-W48 network (Sun et al.,
2019). This neural network does not follow the com-
mon encoder-decoder structure, but instead maintains
a full-resolution branch throughout the entire network
and several downsampled branches in parallel for en-
larging the receptive field. To finally combine the
separate branches, the downsampled branches are up-
sampled and concatenated to the main branch (Sun
et al., 2019). Whereas optimizing this architecture
further to improve the robustness of our road segmen-
tation task may be possible, we instead adopt the idea
from MSeg (Grigorescu et al., 2020) and focus on the
data instead of the CNN architecture.
The authors from MSeg have already shown
that an unaltered HRNetV2 trained on seven differ-
ent datasets simultaneously outperforms robustness-
specialized techniques on the highly challenging and
diverse WildDash (Zendel et al., 2018) test set. How-
ever, Mseg does not yet include datasets with unpaved
roads. Furthermore, while WildDash is highly var-
ied from a weather and environments point of view, it
still primarily focuses on urban scenes, making it less
suited as a test set for our work. Because of this, we
will only employ WildDash to verify generalization
of our trained network to urban scenes.
To perform dataset balancing, we adopt the
method from Mseg: in every training batch an equal
number of images from each dataset is used. For
example, this means that if there is one dataset of
10,000 images and one of 1,000 images, the former
will only be seen by the network once per epoch,
while the latter will be seen ten times per epoch.
The advantage of this approach is that it forces the
network to perform well on all datasets, but the
downside is that it may also cause overfitting on
small datasets or datasets with low variety. We expect
overfitting on the small datasets to not be a problem,
due to the large number of different datasets that we
Robust Path Planning in the Wild for Automatic Look-Ahead Camera Control
555

will be combining, but this aspect should certainly be
kept in mind when combining fewer datasets.
Dataset Expansion. The training datasets that MSeg
employs are extremely varied: two datasets contain-
ing all kinds of scenes, both indoor and outdoor, with
various objects (COCO and ADE20K), the indoor
segmentation dataset SUN RGBD, and the four driv-
ing datasets Mapillary Vistas, IDD, BDD100K and
Cityscapes. MSeg also tests on highly varied datasets,
but we limit ourselves to the testing of road segmenta-
tion, to achieve stronger performance on our special-
ized task: robust road segmentation on unstructured
and unpaved roads.
A. Public Off-Road Dataset Additions.
Several small segmentation datasets exist that may
contain useful data for unpaved road segmentation.
All datasets are filtered to only contain images with
at least one pixel labeled as “road”. The number of
images left after filtering is given between brackets.
• Yamaha-CMU Off-Road (YCOR) dataset (Matu-
rana et al., 2018): 1,076 (982) labeled images col-
lected at four different locations using a vehicle-
mounted camera, with quite variable road types:
concrete, dirt, gravel and tire tracks, providing a
good baseline for unpaved road segmentation.
• Robot Unstructured Driving Ground (RUGD)
dataset (Wigness et al., 2019): 7,453 (3,637) la-
beled images in eight different terrains, recorded
using a small robot. The dataset contains mostly
asphalt and some gravel roads. However, the
roads are clearly not the focus of the data collec-
tion, as the robot mostly drives besides the roads
and paths. The size of the robot also causes the
camera to be very close to the ground.
• Freiburg Forest (FF) dataset (Valada et al., 2016):
366 (366) labeled images in forest environments,
recorded using both an infrared camera and a reg-
ular RGB camera. This data are highly relevant
to our use case, even though the set is relatively
small and contains limited variety. Most roads in
the dataset are gravel-like.
• Rellis-3D dataset (Jiang et al., 2020): A dataset
with 6,235 (3,906) images, recorded in a grass
field with dirt tire tracks. Although the dataset is
quite large, the image variety is extremely limited.
We remap all the labels of these four datasets and
combine them with the four public urban driving
datasets, for a total of eight different training datasets.
B. Semi-Supervised Addition of New Data
To increase the variety of data further, additional
data are recorded and annotated. Data are recorded
on several road types: sand, dirt, tire tracks, as-
phalt, concrete and stone-paved roads, mostly in for-
est environments. Since the focus is on road seg-
mentation and the creation of full-image semantic la-
bels is extremely time-consuming, we only manu-
ally label the road class. All non-road pixels in the
dataset are (pseudo-)labeled automatically using the
HRNetV2-W48, which is trained on a combination of
all Mseg datasets that contain roads (Mapillary Vistas,
BDD100k, Cityscapes and IDD) and the four public
unpaved road datasets (YCOR, RUGD, FF and Rel-
lis3D). Since inference time is irrelevant for one-time
labeling, we improve the pseudo-labels by applying
the common trick of performing inference on both the
original and mirrored version of the same image at
multiple scales and averaging the predictions to ob-
tain the final pseudo-labeled image.
This procedure results in 114 annotated images
that were recorded in one location in forests in The
Netherlands, another 283 images spread over multi-
ple locations in The Netherlands and 116 images that
were captured in forests and fields in Austria. The
recordings were performed over several days, so that
there is some weather variety, though it is mostly
overcast and sunny. The 114 images of the first loca-
tion in The Netherlands are added to the training data
(NL), the 283 images of other locations in the Nether-
lands and 116 Austria images are used as validation
sets NL-val and AT-val, respectively.
3.2 Robust Path Planning
The primary goal of the system is to find the center of
the road, or all possible road centers in all directions
in the case of crossings. In general, the path-planning
algorithm consists of the following steps: the seman-
tic output of the neural network is converted to a bi-
nary road mask, then transformed into a bird’s-eye
view (BEV), and finally used for the path planning, by
detecting start and end points of the roads and draw-
ing paths between these points.
Although this general method is adequate to de-
tect the road centerline in ideal conditions, there are
several common cases that result in less ideal paths
without additional filtering. These cases are:
• Poor road segmentation. In most cases, this oc-
curs because parts of the road are mapped to road-
like classes, such as “gravel” instead of the spe-
cific “road” class, or sometimes road pixels are
mapped to entirely different classes if the domain
of the test image is too different from the CNN
training data. Both cases can cause holes in the
road mask.
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
556

• Perspective transform distortion of far-away pix-
els. After perspective transformation, far-away
pixels become very large in the BEV road mask,
which can cause separate road detections on tiny
bumps in the original road mask.
• Poor close-range road centerline accuracy. Due
to a limited horizontal camera field of view, the
entire width of the road will not be captured near
the camera position. If the vehicle is not in the
center of the road, this causes an incorrect path-
planning start point.
• Detected end points not at the road center. For
example, for a perfectly straight road, BFS will
find the largest distance to the start point at the
top-left and top-right corners of the road, instead
of the road center.
The following sections describe the implementation
and improvement of the proposed path-planning al-
gorithms to significantly reduce the aforementioned
problems, structured according to the Road Mask Pro-
cessing and Path Planning blocks of Fig. 2.
3.2.1 Road-Mask Processing
Compared to simply using the binary road mask re-
sulting from segmentation directly, several improve-
ments are proposed for more robust path generation.
A. Class Remapping. To convert the semantic seg-
mentation map into a road mask, it is possible to
remap multiple classes of the output of the neural
network to road, instead of only the “road” class it-
self. The classes that generally still match road are:
“gravel”, “railroad” (especially in the presence of
tram rails), and “runway”. In practice, we have no-
ticed that it can help to also remap “snow” to road,
as some sandy roads are misclassified into snow, al-
though clearly this is only viable if the system will
never be used in an environment containing actual
snow. Note that this remapping is performed at in-
ference time only and not during training of the seg-
mentation CNN. Remapping during training would
require manual relabeling, especially for the “gravel”
class, because this class sometimes refers to ter-
rain and sometimes to gravel-like roads in the public
datasets.
B. Connected-Component Filtering. We assume that
in normal operating conditions, there can only be a
single “road” blob. Hence, small spurious road de-
tections are removed by finding the largest connected
component and setting all other mask pixels to black.
C. Hole Filling. A normal road will not have areas of
non-road inside it, hence holes are filled by finding the
contours of all blobs of the road mask and filling the
inner contours. Note that this step is only viable for
camera control, where the center of the road should
be found regardless of objects on the road. In the case
of autonomous driving, this step should be omitted,
because holes in the road mask likely indicate objects
that should be avoided. In Fig. 3 a single hole is filled,
shown in green.
D. Row-Gap Filling. When using a perspective trans-
form to compute a BEV, far-away pixels will cover a
larger area of the BEV road mask than nearby ones.
This causes strong jagged edges in the upper part of
the road mask, which is harmful for road end-point
detection. A simple heuristic for circumventing this
problem, is filling up small (up to a few pixels) hori-
zontal gaps at the edge of the road mask, prior to com-
puting the BEV. An example of this issue and why
filling horizontal row gaps resolves the jagged edges,
is shown in Fig. 3 and highlighted in red.
E. Bird’s-Eye View Transform. To simplify the path-
planning process, the road mask is converted to BEV
using a perspective transformation. The perspective
transformation parameters are estimated based on a
single image from the vehicle-mounted camera setup
on a long flat straight road, where a vanishing point is
clearly visible. Note that this calibration is only valid
for a fixed tilt and zoom setting of the PTZ camera
and will result in an increasingly incorrectly warped
result in case the road surface is not flat. Thankfully,
in practice, the path-planning algorithms are quite ro-
bust against incorrect perspective transformations be-
cause of the inversion of the transform at the end of
the path-planning stage.
F. Close-Range Filling. Due to the limited camera
field of view, the road area that is very close to the
vehicle is normally out of view. When the vehicle is
not currently positioned at the center of the road, the
road centerline estimation becomes inaccurate when
close to the vehicle. Filling the BEV downwards from
the point where the detected road touches the edges of
the original image, solves this problem. An example
is shown in Fig. 3, at the bottom of the BEV road
mask, where the filled area is indicated in blue.
3.2.2 Path Planning
Path planning consists of finding the shortest possible
paths from a start point to one or several end points, as
visualized in the rightmost image in the flowchart of
Fig. 2. More specifically, the possible paths are con-
strained to be as close to the road center as possible.
Besides simply finding these start and end points, we
perform several steps to improve their quality.
Detection of the Start Point. To find the path-planning
start point, it is assumed that the vehicle is driving on
the road. Under this assumption, the middle of the
bottom row of “road” pixels in the BEV is a reason-
Robust Path Planning in the Wild for Automatic Look-Ahead Camera Control
557

Figure 3: Mask filtering impact example. The impact of
row-gap filling is enhanced and highlighted in red at the top
of the road, out-of-view filling is shown in blue and hole
filling in green.
able starting point from which the path planning is
commencing. Note that this point can be slightly in
front of the vehicle depending on camera tilt, because
the camera is at a certain height above the ground
and has limited vertical field of view. Hence, the bot-
tom row of pixels in the original image, which corre-
sponds to the bottom row of pixels in the BEV image,
is aligned with the line where the vertical field of view
of the camera intersects with the ground plane. In our
test setup, the tilt of the PTZ camera is set such that
this point is approximately four meters in front of the
vehicle.
Detection of End Point(s). In order to find all viable
road centerlines, end points should be located on all
branching roads in the image. For example, an inter-
section generally results in three viable road center-
lines. Potential endpoints are detected by applying a
Breadth First Search (BFS) on the BEV road mask.
This search returns an image where every pixel has
a value representing the distance to the start point.
End points are then estimated by finding local max-
ima in the resulting image. To prevent a large number
of spurious maxima at rough edges of the mask, we
consider a local maximum only if it is the maximum
value within a certain window size, instead of merely
comparing to adjacent pixels.
Improving the BFS is one way to achieve more
reliable endpoints. We modify the 8-way BFS so
that moving diagonally costs
√
2 movement instead
of unity. This improves the detection of end points
for side roads or roads with strong curves, as the ap-
proximated distance is closer to a Euclidean distance.
End point(s) Filtering. Using the above algorithm,
results in several incorrect end points. The majority
of these incorrect end points are caused by two as-
pects. First, due to the way that endpoints are de-
tected, namely using BFS, the end points may not end
up in the middle of the road, but instead at the cor-
ners of the road mask, because they are slightly fur-
ther away. This only causes the last part of the path
to be incorrect, but this issue is still worth addressing.
To alleviate this problem, we search for end points at
the top row of road mask pixels and merge (in case
of two end points connected by only white pixels) or
move them (in case of a single end point) to the cen-
ter of this row of pixels. An example is shown at the
top of Fig. 4. The issue is now resolved for straight
roads, but end points for curved roads may also be
moved incorrectly. To prevent moving end points of
curved roads, end points are only moved if their hori-
zontal positions are within the width of the road at the
bottom of the BEV, plus a small margin. The second
cause of incorrect end points is shape deviations in the
road mask, which primarily appear when the road is
not clearly separable from the roadside. This happens
most often close to the vehicle, where the high reso-
lution allows for example small clumps of grass to be
detected as “not road”, as in the bottom right of Fig. 4.
In practice, because this issue only appears close to
the vehicle, we simply filter out road end points that
appear too close to the vehicle. In case there really is
a road fork this close to the vehicle, the camera should
have been tracking it earlier, and would have rotated
its orientation such that the fork would no longer be
at the side of the view. Hence, we can conclude that
this road fork is not the desired path anyway.
Figure 4: Example of end point filtering which shows both
centering end points at road endings and filtering out nearby
end points.
Path Finding. To find a path through the center of the
road from the start point to all end points, a distance
transform is applied to the BEV road mask, inverted
and then used as the cost for an A* path-finding al-
gorithm. The low cost far away from non-road pixels
causes the A* algorithm to find a path as far away as
possible from these non-road pixels, which approxi-
mates the center of the road.
When taking the regular distance transform of an
image, at every pixel, the distance to the nearest zero
pixel is returned. Local high values in the distance
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
558
transform are a good approximation of the center of
the road, as long as the road touches both the top and
bottom of the BEV image. In cases where distant road
is occluded, for example due to a height difference,
the road mask in the BEV will end partway in the im-
age. An example of this is shown in Fig. 5. As can be
observed at the bottom left of the Figure, this causes
the high values in the distance transform to no longer
align with the center of the road. To remedy this,
the BEV mask is temporarily modified by changing
the pixel values of the rows above the top-most road-
mask pixel to white, after which the distance trans-
form is applied. The rows of changed pixels are then
set back to black in the distance transform, resulting
in the bottom-right image of Fig. 5. A similar process
can be applied for cases where the road pixels do not
start at the bottom-most row of the BEV, although this
case is uncommon.
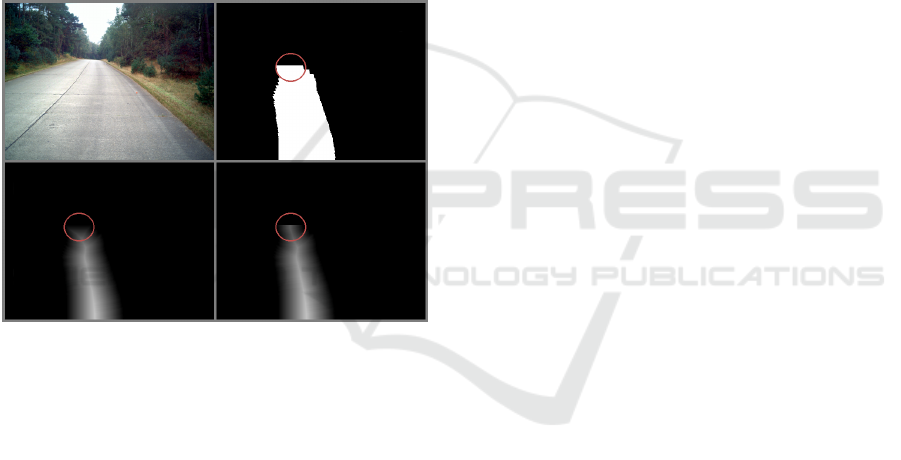
Figure 5: Modified distance transform example. The local
maxima of the distance transform now more clearly follow
the center of the road, all the way until the end of the road
mask.
4 EXPERIMENTAL RESULTS
The resulting path-finding system performs well on
our private datasets. In the following sections, the
road segmentation and path-finding results are dis-
cussed separately. For road segmentation, we primar-
ily investigate the impact of training with different
datasets.
4.1 Impact of Datasets on Performance
The selection of datasets that are used to train the road
segmentation model has a large impact on the perfor-
mance. To evaluate the impact of each dataset on un-
structured road segmentation performance, we fine-
tune the Mseg-pretrained HRNet-W48 for 10 epochs
on each individual dataset and test the road segmen-
tation performance on our two validation datasets
in the Netherlands (NL-val) and Austria (AT-val).
The road IoU of the WildDash validation set (WD-
val) is reported to verify that the model is not over-
trained on only unstructured or unpaved roads, but
the performance on this dataset is not leading for
our application. The results of fine-tuning on indi-
vidual datasets are listed in the middle block of Ta-
ble 1. “Mseg HRNet-W48” refers to the model spre-
trained by (Grigorescu et al., 2020) on ADE20K,
BDD100K, Cityscapes, COCO-Panoptic, IDD, Map-
illary Vistas and SUNRGBD. “Public” refers to all
public datasets that we found to be potentially use-
ful for unstructured road segmentation: BDD100K,
Cityscapes, IDD, Mapillary Vistas, Freiburg Forest,
RUGD and YCOR. A Cityscapes-pretrained PSPNet-
50 (Zhao et al., 2017) is included as a baseline.
From the bottom half of Table 1, it could be con-
cluded that some datasets are not worth combining,
as they cause rather poor IoU scores on our own
recorded datasets when applied independently. The
most extreme case of this is the RUGD dataset, which
is likely due to the extremely low viewpoint, driving
mostly besides the road instead of on it, and having a
limited variety of road types. The top half of Table 1
shows the results of combining multiple datasets to
further improve the performance. It shows that re-
moving the lower-performing RUGD data can indeed
improve accuracy in some cases, but the impact is mi-
nor enough such that simply combining all possible
relevant datasets seems to be a reasonable guideline
in general.
4.2 Path-Finding Qualitative Results
The path planning is difficult to evaluate quantita-
tively without extensive manual labeling effort, there-
fore we focus on reporting some failure cases that
persist even after using our best segmentation model
(trained on Public+NL) and applying all the path-
planning improvements described in Sections 3.2.1
and 3.2.2. The NL-val dataset shows worse path-
finding failures than the AT-val dataset, hence the ex-
amples displayed here are all from NL-val.
Fig. 6 shows four different path-finding failure
cases, with blue borders indicating the detected road
and the red lines the estimated centerline(s). In (a),
a noisy offshoot from the segmentation is sufficiently
far away, such that after the BEV transformation it
becomes sufficiently large to be recognized as a side
road. This is hard to repair afterwards, hence it would
likely require a better segmentation, and thus a better
trained network, to prevent this. In (b), a tire-track
Robust Path Planning in the Wild for Automatic Look-Ahead Camera Control
559
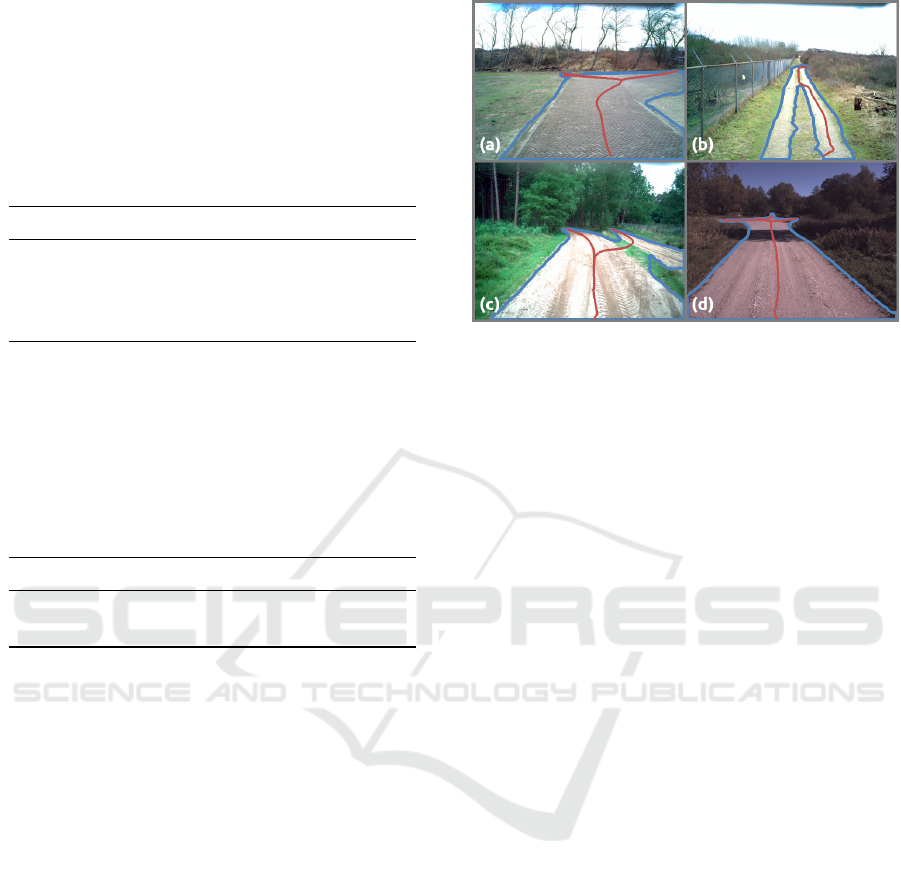
Table 1: Results of fine-tuning the HRNet-W48 network
on several different (combinations of) datasets, where bold
scores are highest and italic are second-highest. Top block
of the table has been trained on combinations of datasets,
middle block on single datasets and bottom block are pre-
trained networks from other authors. Each block is sorted
by the mean IoU. *(Note: only road segmentation is eval-
uated, not any other classes, hence these WildDash scores
cannot directly be compared to other works that evaluate on
it).
Train Dataset NL-val AT-val WD-val* Mean
Public+NL 0.928 0.964 0.844 0.912
Public+NL-RUGD 0.927 0.961 0.840 0.909
Public-RUGD 0.907 0.944 0.849 0.900
Public 0.814 0.943 0.818 0.858
YCOR 0.927 0.941 0.784 0.884
IDD 0.875 0.911 0.878 0.888
NL 0.918 0.945 0.593 0.819
Cityscapes 0.886 0.875 0.878 0.880
Mapillary Vistas 0.551 0.805 0.828 0.728
Freiburg Forest 0.652 0.773 0.496 0.640
Rellis3D 0.733 0.733 0.515 0.660
BDD 0.256 0.687 0.829 0.591
RUGD 0.138 0.030 0.371 0.179
Pretrained baselines
Mseg HRNet-W48 0.395 0.880 0.809 0.695
PSPNet-50 0.609 0.378 0.538 0.508
road is detected as two separate roads. This failure
case is common, because all public datasets with tire-
track roads also annotate it as separate tracks. Hence,
manual relabeling of the public datasets is likely the
easiest solution, but time-consuming. In (c), two par-
allel roads separated by some grass are partially de-
tected as a single road. This is the opposite of the
problem in (b): it looks similar to a tire track with
grass in the middle, and our private dataset has tire
tracks annotated as a single blob, causing this edge-
case error. This error only happens in this specific
frame and nowhere else in the dataset, hence it is
probably not a big issue. In (d), a 4-way crossing re-
sults in 5 detected paths. This is rather common when
the crossing is still far away, because the shape is not
yet well-defined. This problem solves itself once the
vehicle more closely approaches the crossing, thus it
is not a real problem in practice.
Overall, the failure cases are deemed acceptable
for the application of camera control, but applica-
tion of the proposed algorithm for autonomous driv-
ing may require additional robustness improvements,
such as temporal filtering.
Figure 6: Path-finding failure cases in the NL-val dataset.
Road segmentations are outlined in blue, estimated center-
lines in red. (a) Noisy segmentation offshoot, (b) sepa-
rated tire-track road, (c) merged close-together roads, (d)
too many paths at intersection (spurious tiny path at top
left).
5 DISCUSSION
Although the path-planning system works well on our
test cases, it also has several limitations. First, while
many road types are now present in the combined
dataset, there are still edge cases that are not captured.
For example, the unpaved road datasets do not contain
many images in the dark or with rainy weather, hence
performance in those situations is likely to remain
limited, as can be partly observed from the WildDash
dataset performance.
Second, even though the final performance on our
test set is considered good, the performance with only
the seven public datasets, thus without the NL images,
is moderate at the NL-val set, which shows that gener-
alizing to new road types still remains difficult. Over-
all, there is still a lack of good public datasets, even
small ones, that contain all possible road types.
Third, the path-planning algorithm currently does
not take other road users into account. While this is
actually beneficial to our specific use case of camera
control, it is detrimental when applying this algorithm
for autonomous driving. Thus, when trying to use
our work for autonomous driving, the most valuable
part is the robust road segmentation and not the path-
finding algorithm.
6 CONCLUSION
In this paper we have proposed a robust path-planning
system for any type of road, with a focus on un-
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
560

paved roads. There are two main contributions. First,
we have combined seven public driving and robotics
datasets, which together contain a large variety of
road types, and trained a HRNet-W48 network on this
data to achieve robust road segmentation. Second,
we have developed a path-finding algorithm and im-
proved its robustness to incorrect road segmentation
in several ways, allowing for automated control of a
vehicle-mounted PTZ camera, which can handle road
crossings and forks.
Our experimental results have shown that individ-
ual driving datasets contain insufficient variety to al-
low training of a robust road segmentation system
for all road types. Combining seven different pub-
lic datasets and adding just a small number of semi-
automatically labeled images greatly improves the
performance to the point that all roads in the test
dataset can be accurately segmented. Although this
paper is primarily concerned with camera control, the
robust road segmentation for a broad class of roads
can also be of interest for work in autonomous driv-
ing.
Overall, we conclude that robust path planning on
any type of road is feasible, but will still require com-
parable extensive datasets that autonomous driving re-
search has generated for urban environments over the
past few years. Until then, combining many existing
datasets is a good alternative for generalization.
REFERENCES
Cordts, M., Omran, M., Ramos, S., Rehfeld, T., Enzweiler,
M., Benenson, R., Franke, U., Roth, S., and Schiele,
B. (2016). The Cityscapes Dataset for Semantic Urban
Scene Understanding. In CVPR 2016.
Giusti, A., Guzzi, J., Ciresan, D. C., He, F. L., Rodriguez,
J. P., Fontana, F., Faessler, M., Forster, C., Schmid-
huber, J., Caro, G. D., Scaramuzza, D., and Gam-
bardella, L. M. (2016). A Machine Learning Ap-
proach to Visual Perception of Forest Trails for Mo-
bile Robots. IEEE Robotics and Automation Letters,
1(2):661–667.
Gonz
´
alez, D., P
´
erez, J., Milan
´
es, V., and Nashashibi, F.
(2016). A Review of Motion Planning Techniques for
Automated Vehicles. IEEE Transactions on Intelli-
gent Transportation Systems, 17(4):1135–1145.
Grigorescu, S., Trasnea, B., Cocias, T., and Macesanu,
G. (2020). A survey of deep learning techniques
for autonomous driving. Journal of Field Robotics,
37(3):362–386.
Jiang, P., Osteen, P., Wigness, M., and Saripalli, S. (2020).
RELLIS-3D dataset: Data, benchmarks and analysis.
arXiv 2011.12954v2.
Maturana, D., Chou, P.-W., Uenoyama, M., and Scherer,
S. (2018). Real-Time Semantic Mapping for Au-
tonomous Off-Road Navigation. In Springer Proceed-
ings in Advanced Robotics, pages 335–350.
Nakagomi, H., Fuse, Y., Nagata, Y., Hosaka, H., Miyamoto,
H., Yokozuka, M., Kamimura, A., Watanabe, H., Tan-
zawa, T., and Kotani, S. (2021). Forest road sur-
face detection using LiDAR-SLAM and U-Net. 2021
IEEE/SICE International Symposium on System Inte-
gration, pages 727–732.
Neuhold, G., Ollmann, T., Bulo, S. R., and Kontschieder,
P. (2017). The Mapillary Vistas Dataset for Semantic
Understanding of Street Scenes. In ICCV 2017.
Paden, B.,
ˇ
C
´
ap, M., Yong, S. Z., Yershov, D., and Fraz-
zoli, E. (2016). A survey of motion planning and con-
trol techniques for self-driving urban vehicles. IEEE
Transactions on Intelligent Vehicles, 1(1):33–55.
Qureshi, A. H., Simeonov, A., Bency, M. J., and Yip, M. C.
(2019). Motion planning networks. In Proceedings -
IEEE International Conference on Robotics and Au-
tomation, volume 2019-May, pages 2118–2124.
Ronneberger, O., Fischer, P., and Brox, T. (2015). U-Net
: Convolutional Networks for Biomedical. In Med-
ical Image Computing and Computer-Assisted Inter-
vention (MICCAI), pages 234–241.
Shelhamer, E., Long, J., and Darrell, T. (2016). Fully con-
volutional networks for semantic segmentation. IEEE
Transactions on Pattern Analysis and Machine Intel-
ligence, 39(4):640–651.
Sun, K., Zhao, Y., Jiang, B., Cheng, T., Xiao, B., Liu, D.,
Mu, Y., Wang, X., Liu, W., and Wang, J. (2019). High-
resolution representations for labeling pixels and re-
gions. arXiv 1904.04514v1.
Valada, A., Oliveira, G. L., Brox, T., and Burgard, W.
(2016). Deep Multispectral Semantic Scene Under-
standing of Forested Environments Using Multimodal
Fusion. In International Symposium on Experimental
Robotics (ISER).
Varma, G., Subramanian, A., Nboodiri, A., and Chandraker,
M. (2019). IDD : A Dataset for Exploring Problems of
Autonomous Navigation in Unconstrained Environ-
ments. In IEEE Winter Conference on Applications
of Computer Vision (WACV).
Wigness, M., Eum, S., Rogers, J. G., Han, D., and Kwon,
H. (2019). A RUGD Dataset for Autonomous Navi-
gation and Visual Perception in Unstructured Outdoor
Environments. IEEE International Conference on In-
telligent Robots and Systems, pages 5000–5007.
Yadav, S., Patra, S., Arora, C., and Banerjee, S. (2017).
Deep CNN with Color Lines Model for Unmarked
Road Segmentation. In IEEE International Confer-
ence on Image Processing (ICIP), pages 585–589.
Yu, F., Chen, H., Wang, X., Xian, W., Chen, Y., Liu, F.,
Madhavan, V., and Darrell, T. (2020). BDD100K: A
Diverse Driving Dataset for Heterogeneous Multitask
Learning. In CVPR 2020, pages 2633–2642.
Zendel, O., Honauer, K., Murschitz, M., Steininger, D.,
and Dom
´
ınguez, G. F. (2018). WildDash - Creating
Hazard-Aware Benchmarks. In Proceedings of ECCV,
pages 407–421.
Zhao, H., Shi, J., Qi, X., Wang, X., and Jia, J. (2017). Pyra-
mid Scene Parsing Network. In CVPR.
Robust Path Planning in the Wild for Automatic Look-Ahead Camera Control
561
