
DeNos22: A Pipeline to Learn Object Tracking Using Simulated Depth
Dominik Penk
1
, Maik Horn
2
, Christoph Strohmeyer
2
, Frank Bauer
1
and Marc Stamminger
1
1
Chair of Visual Computing, Friedrich-Alexander-Universit
¨
at Erlangen-N
¨
urnberg, Cauerstraße 11, Erlangen, Germany
2
Schaeffler Technologies AG & Co. KG, Industriestraße 1-3, Herzogenaurach, Germany
fl
Keywords:
6D Pose Estimation, Object Tracking, Depth Simulation, Machine Learning, Robust Estimators.
Abstract:
We propose a novel pipeline to construct a learning based 6D object pose tracker, which is solely trained on
synthetic depth images. The only required input is a (geometric) CAD model of the target object. Training data
is synthesized by rendering stereo images of the CAD model, in front of a large variety of backgrounds gen-
erated by point-based re-renderings of prerecorded background scenes. Finally, depth from stereo is applied
in order to mimic the behavior of depth sensors. The synthesized training input generalizes well to real-world
scenes, but we further show how to improve real-world inference using robust estimators to counteract the
errors introduced by the sim-to-real transfer. As a result, we show that our 6D pose trackers achieve state-of-
the-art results without any annotated real-world data, solely based on a CAD-model of the target object.
1 INTRODUCTION
Object pose estimation for known objects is an inte-
gral part of many tasks, ranging from visual inspec-
tion to augmented reality applications. Despite its
importance, robust and global solutions to this prob-
lem were not available until the emergence of learn-
ing based pose estimation approaches in recent years.
These methods require a large amount of training
data, RGB(-D) images with associated object poses,
to be properly trained. The labeling process is partic-
ularly tedious and time-consuming since navigating a
3D environment and manually fitting an object pose
is unintuitive for most users.
In this paper, we present a pipeline to bootstrap a
depth-based object pose tracker, which does not need
any manually labeled data. The bootstrapping only
requires the geometric CAD data of the object. We do
neither require nor use any kind of real-world train-
ing data or manually crafted labels. Training relies
purely on synthetic depth images, which ensures that
we can produce an exhaustive amount of training data
without any user interaction.
We prefer depth images over RGB images as in-
put for pose estimation for a simple reason: Synthe-
sizing RGB images as training data is a highly desir-
able goal, but also particularly difficult. Many effects,
like environmental illumination, specular highlights,
or object albedo, have a strong impact on the final re-
sult. Thus, these effects need to be modeled, which
makes it necessary to have material properties and
textures of the target object. This kind of data is not
available in most industrial applications. Depth im-
ages on the other hand exclusively contain geometric
information, which can be synthesized using a CAD
model only. They are also less influenced by envi-
ronmental and object specific attributes. We present a
pipeline for the generation of training data for depth-
based pose estimation in Section 3. Pose estimation
trained on our synthesized depth images generalizes
relatively well to real-world data, nevertheless a sim-
to-real domain gap remains. We address this in Sec-
tion 4 by postprocessing and filtering the network pre-
dictions to improve performance. We evaluate this ap-
proach in Section 5 and show that we perform on par
with prior work.
While we present an object tracking network, a
major aspect of our contribution is the proposed syn-
thesis of training data. That data can be employed to
train a variety of other object-related tasks. This ex-
tends the utility of our training approach to various
other applications.
2 RELATED WORK
The field of 6D pose estimation contains a large body
of work. Here, we will give a short overview of some
subfields that are closely related to this work.
Penk, D., Horn, M., Strohmeyer, C., Bauer, F. and Stamminger, M.
DeNos22: A Pipeline to Learn Object Tracking Using Simulated Depth.
DOI: 10.5220/0011635100003417
In Proceedings of the 18th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2023) - Volume 5: VISAPP, pages
953-962
ISBN: 978-989-758-634-7; ISSN: 2184-4321
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
953

DeNos22
Training Pose Estimation
Final Pose
ICP
Tracking
Pose
Filter
RANSAC
Pose Fitting
NOS Map
DeNos22
CAD Model
Depth Image
Reference Output
Input Data
randomized
Data Synthesis
NOS Map
Pixel Mask
Depth Image
Synthesized Data
randomized
Postprocessing
Virtual
Depth
Camera
randomized
IR Projection
randomized
Env. Lighting
3D World
Background
CAD Model
Figure 1: Our proposed pipeline spans the tracker bootstrapping phase and productive use. During setup, we automatically
generate training data for the learning based pose estimate. In production, we deal yield high quality final poses, by using
robust estimators and model-based filtering, despite the sim-to-real gap.
2.1 Local Approaches
Methods in this category expect a CAD model of
the tracked object, an initial rough pose estimation
plus some observation. Probably the most widely
used representative is the iterative closest point (short
ICP) method introduced by (Chen and Medioni,
1992; Besl and McKay, 1992) and its many variants
(Rusinkiewicz and Levoy, 2001). We want to specifi-
cally mention the projective ICP variant introduced by
(Newcombe et al., 2011) which drastically simplifies
the point matching process and is used in this work.
Besides depth or point-cloud observations there are
also methods relying on color images only e.g. (Col-
let et al., 2011).
In general, these methods generate high quality
poses. Unfortunately, the initial pose estimation is a
hard limitation for their practical use, which implies
that these method are often used as a post-processing
step.
2.2 Global Approaches
Methods in this category try to provide a 6D pose
without any prior initialization, which is a much
harder problem compared to the local approach. Clas-
sic approaches commonly rely on handcrafted feature
matches (Birdal and Ilic, 2015; Drost et al., 2010)
between CAD model and an observed point cloud.
Closer related to this work are a large amount of data
driven methods introduced in the last couple of years
that aim to solve 6D pose estimation using neural net-
works. One interesting observation is that a large
portion of these methods try to directly regress the
6D pose on RGB images. One of the first success-
ful approaches in this direction is PoseCNN (Xiang
et al., 2017) which inspired a multitude of similar ap-
proaches (Do et al., 2018; Liu et al., 2019; Liu and
He, 2019).
One major hurdle for any direct regression method
is the representation of rotation, which greatly im-
pacts training speed and the final pose quality. (Kehl
et al., 2017) and (Sundermeyer et al., 2018) propose
to convert direct regression in SO(3) into a classi-
fication problem. However, a simple discretization
into 5° bins yield upwards of 50.000 classes (Sunder-
meyer et al., 2018). As an alternative, some authors
propose complex class generation based on auto en-
coders (Sundermeyer et al., 2020; Sundermeyer et al.,
2018) or viewport proposals (Kehl et al., 2017). On
the other hand, (Zhou et al., 2019) proposes that all
common rotation representations, such as Euler an-
gles or quaternions, are discontinuous in euclidean
space. This inhibits training of neural networks and
they therefore introduce 5D and 6D rotation represen-
tations that are better suited for learning.
Another line of work circumvents these difficul-
ties using a multi stage approach, where per pixel
object space coordinates are found, which are then
used to infer object pose information. Applications of
these method range from body pose estimation (G
¨
uler
et al., 2018) to camera localization (Shotton et al.,
2013). Our method is based on these approaches
which were already applied for instance pose estima-
tion by (Brachmann et al., 2014) and extended to ob-
ject class level pose estimation (Wang et al., 2019).
2.3 Depth Synthesis
Generating high quality synthetic training data is an
active research topic. The task is especially diffi-
cult for RGB data since many real world occurrences,
like lighting or surface properties, must be incorpo-
rated. In this work we try to forgo some of these dif-
ficulties by using depth maps instead. Both (Landau
et al., 2015) and (Planche et al., 2017) propose ex-
tensive frameworks to simulate a specific multi-view
stereo depth sensor as realistically as possible. Simi-
lar works are also available for time of flight sensors
(Keller and Kolb, 2009; Peters and Loffeld, 2008).
Our depth simulation is also tailored to multi-view
stereo sensors and primarily inspired by (Planche
et al., 2017). In order to create an easy to use and
adaptable pipeline we choose to produce semi realis-
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
954

(a) (b)
Figure 2: Depth simulation parameters effect the resulting
depth in different ways. (a) compares the results of block
matching (top) to semi global matching (bottom). Render
settings often lead to less obvious changes in the result-
ing depth. (b) visualizes the resulting depth under changing
lighting projector patterns.
tic depth images. With automated domain randomiza-
tion the trained network nevertheless generalizes well
to different sensors.
A research field closely related to depth simula-
tion is the generation of realistic RGB(-D) images.
Some works use these images to train pose detec-
tion networks, e.g. BlenderProc by (Denninger et al.,
2020) or (Hinterstoisser et al., 2019). In contrast to
our method, these rely on textured meshes and ap-
proximated material properties, which may compli-
cate practical usage.
3 TRAINING DATA SYNTHESIS
At first, our pipeline generates synthetic data to train
a pose estimation network. We aim to create a dataset
containing realistic depth images of the target ob-
ject under varying pose in different environments, to-
gether with all required labels.
Similar to (Planche et al., 2017), we simulate the
depth acquisition process of a stereo camera. This en-
sures that common artifacts of consumer grade RGB-
D cameras such as occlusions and noise are present
in the simulated data. The simulation process is vi-
sualised in the left box of Fig. 1 and consists of two
steps: The scene assembly creates a randomized vir-
tual scene showing the target object in random pose
in front of a plausible, but randomized background.
A virtual stereo camera then captures the scene and
produces the final depth image together with other re-
quired ground truth data. Both steps are detailed in
this section.
Figure 3: Results of our simulation pipeline. From left to
right: The intermediate, rendered left stereo image, the nos
framebuffer and finally the computed depth.
3.1 Scene Assembly
The task of the scene assembly stage is to construct
a set of virtual scenes that sample the real world ade-
quately. This includes, most importantly, varying ob-
ject poses, but also backgrounds and secondary ef-
fects like partial occlusion. To obtain realistic vir-
tual backgrounds, we use a set of RGB-D images of
real world scenes. This is preferred over virtually
created environments, since creating realistic back-
grounds using purely virtual assets is time consum-
ing. Instead, we can easily capture multiple different
views of representative environments using an RGB-
D camera, and increase variation by rendering these
RGB-D images from different perspectives (see next
section). For our examples we use a publicly available
dataset of tables (Wang et al., 2019).
We start the scene assembly with a randomly se-
lected background and place some instances of the
target object into it. In our use cases the tracked ob-
jects are commonly placed on table surfaces, which
we integrated into our assembly process: We extract
large planar regions in the depth map and ensure that
objects always spawn in these regions. To further
increase pose variety we have to rotate the objects
randomly, however, most rotations are not physically
plausible. Instead we compute the convex hull and ro-
tate the object such that a random hull triangle aligns
with the table surface.
Since the background scenes are quite clean we
randomly select additional distractor objects from the
ShapeNet (Chang et al., 2015) dataset and also place
them into the scene.
Finally we place the virtual (stereo) camera to cap-
ture the assembled environment. We also make sure
that the relative position of the camera and the tar-
get objects are similar plausible. This mostly comes
down to a reasonable camera-object distance and
viewing angle (e.g. mostly overhead shots or surface
aligned camera poses).
3.2 Virtual Stereo Rendering
To generate a realistic depth image of our assembled
scene, we closely resemble the computation pipeline
DeNos22: A Pipeline to Learn Object Tracking Using Simulated Depth
955
Central
Differences
Instance Mask
NOS Map
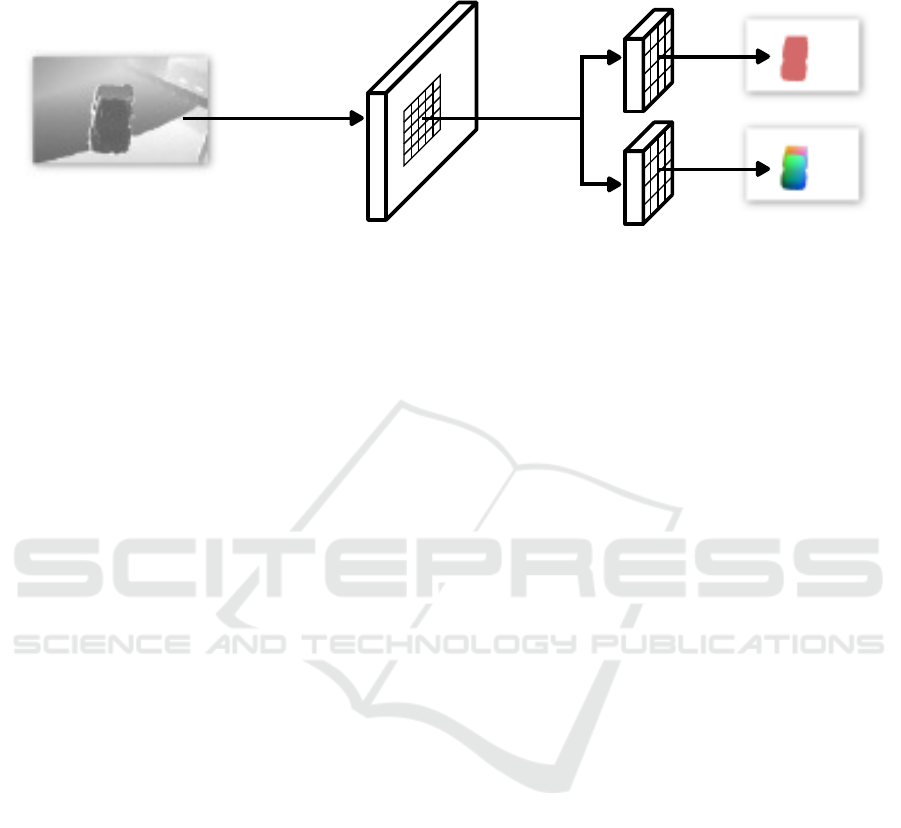
Region Proposal Detection Heads
Depth
ROI Align
conv
conv
Figure 4: The DeNos22 architecture computes the first order derivative of the input depth using central differences and passes
it to the region proposal network. This network generates regions of interest which are processed by two detection heads to
generate nos maps and per pixel instance masks.
as it is used in similar form in RGB-D cameras: first,
two cameras capture an image pair which is, second,
rectified for further processing. Third, corresponding
pixels are matched to compute a disparity map. Fi-
nally, postprocessing filters are applied, e.g. for hole
filling. To improve the finding of correspondences,
most modern RGB-D cameras add high contrast pat-
terns into the scene using a built-in infrared projec-
tor. Some systems use one camera only, and include
knowledge about the projected pattern. We ignore this
case, since the resulting artifacts are similar to a stereo
camera.
The Virtual Stereo Camera block in Fig. 1 resem-
bles this process virtually. We combine image acqui-
sition and rectification by directly rendering perfectly
aligned images and apply correspondence finding and
postprocessing as in real-world depth estimation.
To synthesize the two views, we first render the
chosen captured background scene with point based
rendering (Botsch and Kobbelt, 2003), which allows
us to change perspective for stereo rendering, as well
as to randomize backgrounds. Subsequently, we ras-
terize the placed objects—both target and distractor—
using OpenGL. We use simple Phong shading based
rendering and forego more realistic shading methods
that could imitate secondary effects like reflections.
Similar to (Planche et al., 2017), we simulate the IR
projectors with a textured spotlight. To achieve realis-
tic lighting gradients on the CAD model we use spher-
ical harmonics as environmental illumination. Since
the point clouds are captured from real data, they are
already illuminated, and we only add lighting from
the virtual IR projector.
For each image pair we randomize as many render
settings as possible to capture a wide variety of possi-
ble scenarios. This includes drawing random illumi-
nation coefficients from the Basel illumination prior
(Egger et al., 2018), varying albedo colors and specu-
lar expontents. The exact IR patterns are proprietary,
but are in general semi-random dot patterns or white
noise textures. We therefore generate different dot
patterns using Halton Sequences with random basis.
Note that the goal is not to generate photo-
realistic images—instead the renderings are immedi-
ately passed to a stereo reconstruction pipeline im-
plemented using OpenCV to obtain a realistic depth
map with typical artifacts. In this final step we ap-
ply algorithmic randomization by picking different
stereo matching methods and postprocessing parame-
ters. Figure 2 shows how the rendering and algorith-
mic randomizations impact the final depth map for the
same virtual scene. In general, algorithmic settings
influence the final result the most. Render settings,
on the other hand, have a more subtle influence on the
synthesized depth maps.
With the proposed method we generate ground
truth data including per-pixel labels. The depth im-
ages from the stereo pipeline are perfectly aligned
with the left camera image by construction. There-
fore, any data we output to an additional framebuffer,
while rendering the left camera image, will also be
pixel perfect.
Of particular interest for this paper are per-pixel
correspondences between real world depth and posi-
tion on the CAD surface in object space coordinates
p
o
. We normalize these by the axis aligned bounding
box of the target object to produce normalized object
space coordinates ˜p
o
(short nos coordinates). This en-
sures a value range that is independent of the object
size and is also easy to convert to an RGB image. Re-
construction of the original coordinates is achieved by
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
956

inverting the normalization:
p
o
= p
min
+ ˜p
o
⊙ (p
max
− p
min
) (1)
Here p
min
and p
max
are the extrema of the CAD
model’s bounding box and ⊙ symbolises the element-
wise product.
In Fig. 3 we depict for an example scene the inter-
mediate rendered color, the corresponding nos coor-
dinate and simulated depth map.
4 DeNos22
We adopt a two stage approach for initial pose esti-
mation. A neural network, which we call DeNos22,
receives depth frames and estimates per pixel instance
mask and nos values, which we regress to the initial
pose estimate.
By construction, we know that the predicted nos
coordinate at pixel (u, v) corresponds to the depth
value at the same image location. From these corre-
spondences we can recover the object rotation R and
translation t by minimizing
argmin
R,t
∑
(u,v)∈M
(p
o
(u, v) − Rp
w
(u, v) −t)
2
(2)
with the orthogonal Procrustes method. Here, (u,v) ∈
M refers to all pixels with valid depth values covered
by the object and p
o
is the network prediction denor-
malized using Eq. (1). p
w
is the world space position
we receive by unprojecting the depth at pixel (u, v)
using the depth cameras intrinsic parameters.
4.1 Architecture
The DeNos22 architecture is depicted in Fig. 4 and
originates from the one proposed by (Wang et al.,
2019).
Instead of color images we use the first order
derivative of the depth, computed using central differ-
ences, as input. Using the derivative prevents the net-
work from identifying objects purely based on the dis-
tance to the camera. Our model is based on the pop-
ular Mask R-CNN framework (Doll
´
ar and Girshick,
2017) which has two main stages. First, a region pro-
posal network predicts bounding boxes of foreground
objects and produced feature maps from the input im-
age. In the second stage, the regions of interest are
extracted from the feature maps, reshaped to a com-
mon size and passed to multiple detection heads for
further processing. We use the instance mask and
nos prediction but drop the classification head and as-
sume all foreground objects produced by the region
proposal are valid. The reduced network size did not
Figure 5: RANSAC (center) and least square pose (right)
extracted from a wrongly labeled network prediction. The
RANSAC approach still yields a pose that fits the observed
depth.
lead to a decrease in classification accuracy in our ex-
periments, but reduces training time and increases in-
ference speed.
We train the DeNos22 network with the synthetic
data produced in Section 3 in a supervised fashion.
Similar to (Wang et al., 2019) we do not directly
regress the nos coordinates. Instead, we subdivide
each axis of the unit cube into 32 bins and task the
network to classify to which one a given image pixel
belongs. With this formulation the DeNos22 essen-
tially estimates a three dimensional voxel index with
independent classification tasks. During inference we
use the center of the estimated voxel as an approxi-
mation of the continuous nos coordinate.
4.2 Robust Estimators
In productive use, noisy depth maps and erroneous
nos predictions—which partially originate from the
domain caused by virtual training—decrease the ac-
curacy of the estimated pose. We also observed that
the region proposal stage sometimes outputs false
foreground predictions.
Our network yields many, semi independent, pre-
dictions per observed instance I. Therefore, we can
employ a RANSAC-style method to improve the pose
estimates. For each instance we randomly sample
multiple small subsets M
I
j
from the set of all pre-
dicted nos coordinates M
I
. From those, we predict
rotations R
I
j
and translations t
I
j
according to Eq. (2).
We rate each pose by computing the number of inlier
pixels based on the virtual compared to the observed
depth (
ˆ
d
I
j
and d):
ˆ
d
I
j
(u, v) − d(u, v)
< δ (3)
where δ is a small threshold (e.g. 1cm). We obtain
ˆ
d
I
j
from the depth buffer after rendering the CAD model
using the pose (R
I
j
,t
I
j
).
As depicted in Fig. 5 the proposed method often
yields plausible results, even for wrongly classified
DeNos22: A Pipeline to Learn Object Tracking Using Simulated Depth
957

Figure 6: The bounding box of the rendered object and the
one predicted by DeNos22 match for valid instances (right)
and are often vastly different for invalid ones (left).
foreground regions. This implies the inlier count can-
not be used to identify invalid network predictions. In
a second step, we therefore filter out invalid instances
using two quality metrics, For the first, we compute
the image space bounding box bb
v
of the object given
the estimated pose. This bounding box should match
the one predicted by the network bb
net
, but we ob-
served that this is often not the case for invalid in-
stances, see Fig. 6. This can be described by the in-
tersection over union:
Q
IoU
=
area(bb
v
∩ bb
net
)
area(bb
v
∪ bb
net
)
(4)
Since DeNos22 only produces a bounding box around
the object’s visual parts, we must ensure that the pro-
jected bounding box takes occlusion into account.
This is done by rendering the object and comparing
the depth buffer against the observed depth. In fact,
the required data was already produced to count the
inliers in Eq. (3), so we can reuse it to increase per-
formance.
The second metric is a purely model-based mea-
sure. We assume that the difference between the
network-predicted and simulated nos coordinates
(q
net
and q
v
) is normal-distributed with a zero mean.
In Fig. 7 we show two exemplary distributions (along
a singular dimension). Since the network calculates
the nos coordinate axes independently, we also as-
sume that modalities of the distributions are indepen-
dent. Under these assumptions, we use the Frobenius
norm of the variance to qualify the nos coordinates of
an instance by
Q
nos
= 1.0 −
||
Var(q
net
− q
v
)
||
2
F
(5)
The final instance score combines both metrics
Q
I
= Q
nos
Q
IoU
(6)
Figure 7: The graphs show the difference of rendered and
estimated nos coordinates for two predictions. For a correct
instance (right) these closely follow a normal distribution
centered at 0.
Q
I
covers the range [−∞, 1]. In most of our tests we
dropped instances with a quality below 0.45.
4.3 Pose Refinement
Up to this point, we have shown how to use the
DeNos22 network to obtain a rough estimate for the
pose. (Wang et al., 2019) demonstrated that a final
refinement step can be used to further improve accu-
racy.
Since we have a CAD model of the object, we im-
prove the estimation of the network using the ICP
method. We use projective correspondences intro-
duced by (Newcombe et al., 2011) which where used
to align two depth maps. To use the framework, we
render the virtual depth with an estimated pose as well
as the real depth map. At its core, the method reduces
the point to plane error given a transformation (R,t):
argmin
R,t
∑
i∈M
Rp
i
s
+t − p
i
t
T
n
i
t
2
(7)
Here, p
i
s
and p
i
t
are two world points from the unpro-
jected depth maps and M is a set of pixels, where both
maps contain valid depth data. Similar to Eq. (4) we
have to ensure that M does not include occluded parts
of the CAD model. We do so by dropping matches
where depth values differ too much. This threshold
is crucial for good convergence and high quality final
poses—low values leads to fewer matches and higher
values fail to remove invalid matches. Since the initial
pose is already close, we skew towards a low thresh-
old in our experiments. A value between 5mm and
2cm yielded good results.
Intuitively, we would use the virtual depth to com-
pute p
s
, however this requires to estimate the normals
of the real depth map. These are noisy and we in-
stead compute the inverse transformation—aligning
the depth to the CAD model. With this formulation,
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
958

we use the high quality CAD model normals and do
not introduce additional errors into the optimization.
Many applications track an object through an en-
tire sequence of depth maps. In this case, initial
pose estimation using DeNos22 may be too slow. We
recommend to run the complete pipeline, including
pose refinement at the beginning. For all subsequent
frames, the previous pose can be used to initialize the
ICP algorithm.
5 POSE ESTIMATION QUALITY
In this section we evaluate our 6D pose estimator
trained purely on synthetic data. We evaluate both
on the publicly available LM dataset introduced by
(Hinterstoisser et al., 2012), as well as our own data.
For evaluation we trained the network on datasets
containing 8000 images with 1 to 10 instances of the
target object. While the LM dataset includes albedo
textures, we generated our synthetic data using exclu-
sively the geometry data and a public dataset of RGB-
D backgrounds to imitate a usecase with little real
world data. For training, we use SGD with a learning
rate of 0.001 and two images per batch and terminate
optimization after 100 epochs.
In Table 2 we list the average recall values for
pose-error-functions presented in the BOP 6D pose
detection challenge (Hoda
ˇ
n et al., 2020) for a subset
of all available classes. We used our pipeline to train
a separate DeNos22 per class and the final row of the
table displays the average value over all classes. Our
pipeline performs best in terms of the visible surface
discrepancy AR
V SD
. It measures the per-pixel differ-
ence of rendered depth maps using ground truth and
estimated pose. Note that the local projective ICP
uses a similar optimization criterion. This implies that
a different local pose estimator—tailored to a differ-
ent metric—can be used depending on the use case.
Table 1 shows that our method performs on par
with other state-of-the-art methods, even ones which
use additional input information in form of RGB-D
images. For evaluation we apply pose filtering under
the assumption that an image contains a maximum of
one object instance per class.
We also conduct a small ablation study to investi-
gate the importance of the steps in our pipeline. The
results are compiled in Table 3. We conclude that the
robust pose estimation has a major impact on the final
pose quality. This supports our choice to estimate an
intermediate rotation representation which we regress
manually over a network that directly estimates the
object pose.
Finally, we evaluate the impact of virtual model
acquisition modality on our pipeline. We gathered 9
different objects and produced virtual representations
of them. The CAD models where reconstructed by a
method yielding the best results, including computer
tomography (CT), multi-view-stereo (MVS) or struc-
tured light (SL) reconstruction. We also include two
objects of which we found public, hand crafted, CAD
models. For this evaluation the ground truth pose is
unknown, we therefore rely on an image space metric
inspired by AR
V SD
: We render the CAD model using
the estimated pose and compute the symmetric Haus-
dorff distance between the real and estimated depth
images inside a manually painted visibility mask. In
Fig. 8 we show these per pixel distances in relation
to the object bounding boxes grouped by the differ-
ent acquisition methods. From the plot we can see
that the poses for structure SL reconstructed objects
are highly accurate, whereas MVS-based objects pre-
formed worse. In Fig. 9 we can see two reconstruc-
tions with these methods. The matchbox car was re-
constructed using MVS and is partially noisy, espe-
cially in the highly specular window regions and the
bottom. In contrast, the head figure produced by an
SL scanner shows next to no surface inaccuracies.
We conclude that mesh quality is the main reason for
the difference in pose accuracy. The relation between
pose and mesh quality is plausible, as the CAD model
is integral to all steps of our pipeline. With more
accurate models, we naturally generate more plausi-
ble depth maps for training. We also induce smaller,
model-based errors during pose estimation. This ap-
plies to both, the RANSAC rating and the optimiza-
tion target for the projective ICP.
Figure 8: Hausdorff distance between observed and esti-
mated depth maps for a variety of objects.
6 CONCLUSION
We presented a pipeline to construct a learning based
object tracker from just a CAD model. Our pipeline,
DeNos22: A Pipeline to Learn Object Tracking Using Simulated Depth
959

Table 1: Comparison between our pipeline and state of the art methods on the LM-dataset. The cursive written methods
expect RGB-D input, the others expect just depth.
Method AR
V SD
AR
MSSD
AR
MSPD
AR
Ours 0.875 0.814 0.648 0.779
PPF (Deng, 2022) 0.719 0.856 0.866 0.814
RCVPose (Wu et al., 2021) 0.740 0.826 0.832 0.799
FFB6D (He et al., 2021) 0.673 0.810 0.835 0.773
MGML (Drost et al., 2010) 0.678 0.786 0.789 0.751
Table 2: Average recalls w.r.t. the error metrics defined by
the BOP challenge.
Object A
V SD
A
MSSD
A
MSPD
AR
Statue 0.968 0.912 0.793 0.891
Watering Can 0.652 0.620 0.498 0.590
Kitten 0.949 0.939 0.834 0.908
Screwdriver 0.862 0.837 0.691 0.797
Duck 0.962 0.886 0.717 0.855
Egg Carton 0.947 0.929 0.794 0.890
Glue Bottle 0.765 0.701 0.412 0.626
Puncher 0.892 0.689 0.443 0.675
Average 0.875 0.814 0.648 0.779
Table 3: Average recalls on the LM-dataset for our pipeline
with different parts of the pipeline disabled.
Distractors RANSAC ICP AR
% ✓ ✓ 0.714
✓ % % 0.608
✓ % ✓ 0.666
✓ ✓ % 0.740
✓ ✓ ✓ 0.779
Figure 9: Two samples from of our reconstructed objects.
The matchbox car model was created using multi view
stereo which yields noisy surfaces, e.g. the windows. In
contrast the head statue shows very little noise and was ac-
quired with a structured light scan.
generates a large amount of training data by rendering
stereo images of the object and reconstructing depth
images from these, which results in typical depth
camera artifacts. The large variation in our synthet-
ically generated data set ensures good generalization
of the trained networks to real world sensors. Further
more, we proposed a method to improve pose estima-
tion quality by removing invalid detections and false
poses using a RANSAC-style robust estimator.
Since our pipeline solely relies on a CAD model
it is easy to integrate into many setups that require
an object tracker. In these cases the CAD model is
already required and we do not need to specify any
additional parameters like specularity or surface tex-
ture.
We see four aspects of the depth simulation
pipeline a user might alter to adapt to a specific use-
case: If the background is known—e.g. in an indus-
trial setting where a CAD model of a manufactur-
ing machine is available—the point cloud rendering
could be replaced by rendering the CAD model in-
stead. This yields scenes closer to the real world data
which leads to better foreground-background classi-
fication. Similarly, target object placement can also
be adapted to the specific task. For example, our cur-
rent method yields very fiew partially occluded ob-
jects, which leads to worse detection rates for highly
cluttered scenes. Specifically placing occluder ob-
jects after choosing a camera position would improve
inference quality in this case. Besides this, the cam-
era pose might be restricted for some setups, which
can be directly incorporated into the placement of the
virtual stereo rig. Finally, one could simulate a differ-
ent depth reconstruction modality (e.g. ToF-Cameras)
but keep the inference and scene assembly part of the
proposed pipeline.
REFERENCES
Besl, P. J. and McKay, N. D. (1992). Method for regis-
tration of 3-d shapes. In Sensor fusion IV: control
paradigms and data structures, volume 1611, pages
586–606. Spie.
Birdal, T. and Ilic, S. (2015). Point pair features based ob-
ject detection and pose estimation revisited. In 2015
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
960

International conference on 3D vision, pages 527–
535. IEEE.
Botsch, M. and Kobbelt, L. (2003). High-quality point-
based rendering on modern gpus. In 11th Pacific
Conference onComputer Graphics and Applications,
2003. Proceedings., pages 335–343. IEEE.
Brachmann, E., Krull, A., Michel, F., Gumhold, S., Shot-
ton, J., and Rother, C. (2014). Learning 6d object
pose estimation using 3d object coordinates. In Euro-
pean conference on computer vision, pages 536–551.
Springer.
Chang, A. X., Funkhouser, T., Guibas, L., Hanrahan,
P., Huang, Q., Li, Z., Savarese, S., Savva, M.,
Song, S., Su, H., et al. (2015). Shapenet: An
information-rich 3d model repository. arXiv preprint
arXiv:1512.03012.
Chen, Y. and Medioni, G. (1992). Object modelling by reg-
istration of multiple range images. Image and vision
computing, 10(3):145–155.
Collet, A., Martinez, M., and Srinivasa, S. S. (2011). The
moped framework: Object recognition and pose esti-
mation for manipulation. The international journal of
robotics research, 30(10):1284–1306.
Deng, Y. (2022). Misc3D.
https://github.com/yuecideng/Misc3D/.
Denninger, M., Sundermeyer, M., Winkelbauer, D., Olefir,
D., Hodan, T., Zidan, Y., Elbadrawy, M., Knauer, M.,
Katam, H., and Lodhi, A. (2020). Blenderproc: Re-
ducing the reality gap with photorealistic rendering.
In International Conference on Robotics: Sciene and
Systems, RSS 2020.
Do, T.-T., Cai, M., Pham, T., and Reid, I. (2018). Deep-
6dpose: Recovering 6d object pose from a single rgb
image. arXiv preprint arXiv:1802.10367.
Doll
´
ar, K. H. G. G. P. and Girshick, R. (2017). Mask r-cnn.
In Proceedings of the IEEE international conference
on computer vision, pages 2961–2969.
Drost, B., Ulrich, M., Navab, N., and Ilic, S. (2010). Model
globally, match locally: Efficient and robust 3d ob-
ject recognition. In 2010 IEEE computer society con-
ference on computer vision and pattern recognition,
pages 998–1005. Ieee.
Egger, B., Sch
¨
onborn, S., Schneider, A., Kortylewski, A.,
Morel-Forster, A., Blumer, C., and Vetter, T. (2018).
Occlusion-aware 3d morphable models and an illu-
mination prior for face image analysis. International
Journal of Computer Vision, 126(12):1269–1287.
G
¨
uler, R. A., Neverova, N., and Kokkinos, I. (2018). Dense-
pose: Dense human pose estimation in the wild. In
Proceedings of the IEEE conference on computer vi-
sion and pattern recognition, pages 7297–7306.
He, Y., Huang, H., Fan, H., Chen, Q., and Sun, J. (2021).
Ffb6d: A full flow bidirectional fusion network for
6d pose estimation. In Proceedings of the IEEE/CVF
Conference on Computer Vision and Pattern Recogni-
tion, pages 3003–3013.
Hinterstoisser, S., Lepetit, V., Ilic, S., Holzer, S., Bradski,
G., Konolige, K., and Navab, N. (2012). Model based
training, detection and pose estimation of texture-less
3d objects in heavily cluttered scenes. In Asian con-
ference on computer vision, pages 548–562. Springer.
Hinterstoisser, S., Pauly, O., Heibel, H., Martina, M., and
Bokeloh, M. (2019). An annotation saved is an an-
notation earned: Using fully synthetic training for ob-
ject detection. In Proceedings of the IEEE/CVF in-
ternational conference on computer vision workshops,
pages 0–0.
Hoda
ˇ
n, T., Sundermeyer, M., Drost, B., Labb
´
e, Y., Brach-
mann, E., Michel, F., Rother, C., and Matas, J. (2020).
Bop challenge 2020 on 6d object localization. In Eu-
ropean Conference on Computer Vision, pages 577–
594. Springer.
Kehl, W., Manhardt, F., Tombari, F., Ilic, S., and Navab,
N. (2017). Ssd-6d: Making rgb-based 3d detection
and 6d pose estimation great again. In Proceedings
of the IEEE international conference on computer vi-
sion, pages 1521–1529.
Keller, M. and Kolb, A. (2009). Real-time simulation of
time-of-flight sensors. Simulation Modelling Practice
and Theory, 17(5):967–978.
Landau, M. J., Choo, B. Y., and Beling, P. A. (2015). Sim-
ulating kinect infrared and depth images. IEEE trans-
actions on cybernetics, 46(12):3018–3031.
Liu, F., Fang, P., Yao, Z., Fan, R., Pan, Z., Sheng, W., and
Yang, H. (2019). Recovering 6d object pose from rgb
indoor image based on two-stage detection network
with multi-task loss. Neurocomputing, 337:15–23.
Liu, J. and He, S. (2019). 6d object pose estimation without
pnp. arXiv preprint arXiv:1902.01728.
Newcombe, R. A., Izadi, S., Hilliges, O., Molyneaux, D.,
Kim, D., Davison, A. J., Kohi, P., Shotton, J., Hodges,
S., and Fitzgibbon, A. (2011). Kinectfusion: Real-
time dense surface mapping and tracking. In 2011
10th IEEE international symposium on mixed and
augmented reality, pages 127–136. Ieee.
Peters, V. and Loffeld, O. (2008). A bistatic simulation ap-
proach for a high-resolution 3d pmd (photonic mixer
device)-camera. International Journal of Intelligent
Systems Technologies and Applications, 5(3-4):414–
424.
Planche, B., Wu, Z., Ma, K., Sun, S., Kluckner, S.,
Lehmann, O., Chen, T., Hutter, A., Zakharov, S.,
Kosch, H., et al. (2017). Depthsynth: Real-time re-
alistic synthetic data generation from cad models for
2.5 d recognition. In 2017 International Conference
on 3D Vision (3DV), pages 1–10. IEEE.
Rusinkiewicz, S. and Levoy, M. (2001). Efficient variants
of the icp algorithm. In Proceedings third interna-
tional conference on 3-D digital imaging and model-
ing, pages 145–152. IEEE.
Shotton, J., Glocker, B., Zach, C., Izadi, S., Criminisi, A.,
and Fitzgibbon, A. (2013). Scene coordinate regres-
sion forests for camera relocalization in rgb-d images.
In Proceedings of the IEEE conference on computer
vision and pattern recognition, pages 2930–2937.
Sundermeyer, M., Durner, M., Puang, E. Y., Marton, Z.-
C., Vaskevicius, N., Arras, K. O., and Triebel, R.
(2020). Multi-path learning for object pose estima-
tion across domains. In Proceedings of the IEEE/CVF
DeNos22: A Pipeline to Learn Object Tracking Using Simulated Depth
961

conference on computer vision and pattern recogni-
tion, pages 13916–13925.
Sundermeyer, M., Marton, Z.-C., Durner, M., Brucker, M.,
and Triebel, R. (2018). Implicit 3d orientation learn-
ing for 6d object detection from rgb images. In Pro-
ceedings of the european conference on computer vi-
sion (ECCV), pages 699–715.
Wang, H., Sridhar, S., Huang, J., Valentin, J., Song, S., and
Guibas, L. J. (2019). Normalized object coordinate
space for category-level 6d object pose and size esti-
mation. In Proceedings of the IEEE/CVF Conference
on Computer Vision and Pattern Recognition, pages
2642–2651.
Wu, Y., Zand, M., Etemad, A., and Greenspan, M. (2021).
Vote from the center: 6 dof pose estimation in rgb-
d images by radial keypoint voting. arXiv preprint
arXiv:2104.02527.
Xiang, Y., Schmidt, T., Narayanan, V., and Fox, D. (2017).
Posecnn: A convolutional neural network for 6d ob-
ject pose estimation in cluttered scenes. arXiv preprint
arXiv:1711.00199.
Zhou, Y., Barnes, C., Lu, J., Yang, J., and Li, H. (2019). On
the continuity of rotation representations in neural net-
works. In Proceedings of the IEEE/CVF Conference
on Computer Vision and Pattern Recognition, pages
5745–5753.
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
962
