
Deep Interactive Volume Exploration Through Pre-Trained 3D CNN and
Active Learning
Marwa Salhi
1
and Riadh Ksantini
2
and Belhassen Zouari
1
1
Mediatron Lab, Higher School of Communications of Tunis, University of Carthage, Tunisia
2
Department of Computer Science, College of IT, University of Bahrain, Bahrain
Keywords:
Volume Visualization, Image Processing, Active Learning, CNN, Deep Features, Supervised Classification.
Abstract:
Direct volume rendering (DVR) is a powerful technique for visualizing 3D images. Though, generating high-
quality efficient rendering results is still a challenging task because of the complexity of volumetric datasets.
This paper introduces a direct volume rendering framework based on 3D CNN and active learning. First, a
pre-trained 3D CNN was developed to extract deep features while minimizing the loss of information. Then,
the 3D CNN was incorporated into the proposed image-centric system to generate a transfer function for
DVR. The method employs active learning by involving incremental classification along with user interaction.
The interactive process is simple, and the rendering result is generated in real-time. We conducted extensive
experiments on many volumetric datasets achieving qualitative and quantitative results outperforming state-
of-the-art approaches.
1 INTRODUCTION
The development of scientific visualization technol-
ogy has enabled humans to analyze and observe dif-
ferent shapes in 3D scanned data. These evolutions
are useful for data analysis, drug development, and
disease detection. Based on many machine learning
and deep learning techniques, researchers proposed
relevant approaches for data exploration.
Generating visual images from volume data us-
ing direct volume rendering (DVR) is a common
workflow. The key technique for DVR is the trans-
fer function (TF) by assigning colors and opacity to
the voxel data. Many data-centric and image-centric
transfer function approaches have been proposed. The
main difference between the data-centric and image-
centric approaches is that data-centric TFs are de-
signed based on volumetric data information. On the
contrary, image-centric methods employ rendered im-
ages themselves, not volume properties. The main
difference between the data-centric and image-centric
approaches is that data-centric TFs are designed based
on volumetric data information. Despite the good vi-
sual performance achieved by many proposed data-
centric methods, the interaction process was difficult
for the end user. This is owing to the complex widgets
like histograms and clusters that users have to manip-
ulate. On the contrary, image-centric methods employ
rendered images themselves, not volume properties.
As a result, the interaction process became easy for
the user. Many effective image-centric methods were
proposed but they are not real-time. Recently, a novel
image-centric approach was proposed in (Salhi et al.,
2022). It allows simple interaction with real-time ren-
dering. However, the method uses handcrafted fea-
tures for data description. These handcrafted features
work well when the shape structure is relatively sim-
ple. Nevertheless, as the complexity of the data in-
creases and the target becomes finer, it becomes in-
creasingly challenging to accurately characterize the
structure using manually designed features.
On the other hand, Convolutional Neural Net-
works (CNNs) have become prominent in the solu-
tion of many computer vision problems. In fact,
CNNs are suitable for image analysis and deep fea-
tures extraction. However, despite the promising im-
pact of CNNs, they are still too slow for practice sys-
tems since they require a sufficient amount of time
and large datasets for training. Pre-trained 2D CNNs
show promising results with 2D Data, but they are not
able to work with 3D efficiently. In addition, it has
been shown that 3D CNN is still underdeveloped and
still needs more research (Guo et al., 2020). More-
over, because of the lack of 3D publicly available
datasets that is large and diverse enough for universal
pretraining, using transfer learning methods based on
170
Salhi, M., Ksantini, R. and Zouari, B.
Deep Interactive Volume Exploration Through Pre-Trained 3D CNN and Active Learning.
DOI: 10.5220/0011638500003417
In Proceedings of the 18th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2023) - Volume 1: GRAPP, pages
170-178
ISBN: 978-989-758-634-7; ISSN: 2184-4321
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)

2D CNNs can help to reduce computing time and the
minimum dataset size that is needed to obtain signifi-
cant results. For this reason, many researchers tried to
use 2D CNNs with 3D data. Doing this requires the
transformation of the 3D image. Nevertheless, trans-
forming a 3D object into 2D grids results in losing
information which is not optimal for 3D vision tasks.
In this paper, we propose an image-centric frame-
work that generates a visual presentation of volume
data in real-time. Specifically, we aim to automati-
cally extract deep features for 3D data using a novel
pre-trained 3D CNN while minimizing the loss of in-
formation and computational cost. Then, we integrate
them into an incremental based interactive system.
The proposed framework is simple and intuitive, al-
lowing both user image-based interactions and deep
data processing. The user can guide the generation of
final results without manipulating complex widgets.
After the generation of deep features, a simple GUI
containing the most three informative slices is pre-
sented to the user to select some critical voxels and
assign them to the classes. Then, we use an incre-
mental classifier that learns incrementally the voxels
chosen for training and classification of the volume.
The different classes are mapped automatically to col-
ors and opacity, and the visual result is rendered to the
user in real-time thanks to the incrementality.
Our main contributions are as follows.
• We propose a pre-trained 3D CNN that learns
from a pre-trained 2D CNN to minimize the train-
ing data and time.
• We use the proposed CNN to extract deep features
from the original data to minimize the loss of in-
formation.
• We design an image-driven transfer function ap-
proach based on deep features generation and ac-
tive learning by coupling incremental classifica-
tion with expert knowledge.
• We use incremental classification to achieve real-
time rendering.
• We validate the effectiveness and usefulness of the
framework with a set of experiments on many 3D
data and compare results with other data-centric
and image-centric methods.
2 RELATED WORK
The following section briefly summarizes proposed
methods for direct volume rendering. We review both
data-centric and image-centric approaches.
2.1 Data-Centric Methods
The 1D histogram Transfer function was the first and
the most common technique used in various studies
(Drebin et al., 1988), (He et al., 1996), (Li et al.,
2007), (Fogal and Kr
¨
uger, 2010), (Childs et al., 2012).
However, since using solely the intensity property
was not efficient when separating voxels with differ-
ent features, many researchers proposed 2D or higher
dimensional TFs to overcome the limitations of 1D
TFs. They included many properties, including gra-
dient magnitude (Kniss et al., 2002), color distance
gradient (Morris and Ebert, 2002), curvature (Kindl-
mann et al., 2003), occlusion spectrum (Correa and
Ma, 2009), and view-dependent occlusion (Correa
and Ma, 2010). Athawale et al. (Athawale et al.,
2020) recently proposed a 2D transfer function frame-
work to explore uncertain data.
Since using higher dimensions of the feature space
results in more complications in designing the trans-
fer function, many data-centric methods used cluster-
ing techniques to generate visual results. They cou-
pled clustering with other properties, including LH
histogram (Sereda et al., 2006), density distribution
(Maciejewski et al., 2009), spherical self-organizing
map (Khan et al., 2015), and Lattice Boltzmann (Ge
et al., 2017) to generate TFs.
More recently, researchers include deep learning
techniques to design their TF frameworks. These
techniques provide hierarchical architecture and al-
low better analysis of data. Yang et al. (Yang et al.,
2018) combined a nonlinear neural network with an
improved LH to design the transfer function. Also,
Hong et al. (Hong et al., 2019) incorporated CNNs
and GANs for volume exploration. Torayev et al.
(Torayev and Schultz, 2020) applied a proposed dual-
branch CNN to extract features used for classification.
Data-centric approaches are based on volume
properties. Augmentation of the number of used
domain properties allows efficient distinction of the
structures and achieves better volume rendering.
However, It becomes more complex for the end user
to interact with the system, which results in the need
for much effort to design applicable TFs.
2.2 Image-Centric Methods
Unlike data-centric, image-centric methods are de-
signed on the volume itself, not on its properties.
Thus, image-centric TFs are much easier for the user
to interact with.
Ropinski et al. (Ropinski et al., 2008) presented a
transfer function design where users could draw di-
rectly on a monochromatic view to define strokes.
Deep Interactive Volume Exploration Through Pre-Trained 3D CNN and Active Learning
171

Then, defined strokes are used for the classification
and generation of the transfer functions. Guo et al.
(Guo et al., 2011) presented a popular technique. It
is based on enabling the end user to use a set of in-
tuitive tools to modify visual appearances. Then, the
users’ changes are used to update the rendering re-
sults. A similar approach was proposed recently in
(Khan et al., 2018). They enable users to directly in-
teract with a set of selected slices from the 3D image.
Then, the rendering result is generated based on some
user-selected voxels. Recently, Salhi et al. (Salhi
et al., 2022) proposed an extension of khan et al.’s
method. They simplified the interaction process and
achieved real-time rendering. However, the method
does not use deep features, which affects the quality
of rendering results.
In addition, many deep learning-based image-
centric methods were proposed. Luo et al. (Drebin
et al., 1988) introduced a method to improve the uti-
lization of the GPU and visualize 3D data quickly.
Han et al. (He et al., 1996) introduced a generative
adversarial network-based model for volume comple-
tion. Berger et al. (Berger et al., 2019) employed
GANs for synthesizing renderings of 3D data.
Recently, some image-centric methods based on
CNN were proposed. A CNN allows the effective
description of complex data thanks to its deep fea-
tures. Shi and Tao (Shi and Tao, 2019) used a CNN
to solve the viewpoint selection problem for volume
visualization. They trained the CNN using a gener-
ated dataset containing a large number of viewpoint-
annotated images. Kim et al. (Kim et al., 2021) pro-
posed a TF design based on CNN to automatically
generate a DVR result. They used Internet images to
construct labeled datasets that are used next to train a
CNN model. Then, they extracted label colors using
the trained CNN to construct the final labeled TF.
Contrary to the above-mentioned studies, the pro-
posed method is simple, fast, effective, and doesn’t
require a lot of data for training. It enables user in-
volvement in designing the system without manipu-
lating complex widgets. Besides, the method com-
bines deep and Active learning for generating efficient
and real-time image-centric TF.
3 PROPOSED CNN-based
IMAGE-CENTRIC METHOD
Designing an effective TF depends on three essential
elements, speed, ease of use, and good quality of the
rendering result. For this reason, our proposed ap-
proach is an image-centric method where the user can
interact directly with 2D images that he is familiar
with. It makes use of a 3D CNN designed to minimize
the loss of information while extracting deep features
and incremental classification to generate real-time
rendering.
Figure 1: The CNN-based image-centric TF block diagram.
3.1 User Interaction for Voxels Selection
The performance of most of the existing studies is af-
fected by the human-computer interaction side of the
system. Researchers enable the domain expert to in-
teract with the system not just for usage but also to
control the final result. However, manipulating com-
plex techniques can hinder their workflow. In our
framework, we aim to gather knowledge from the do-
main expert through easy-to-use controls because he
is the best one that knows what to look for. For this
reason, the proposed system enables users to perform
selection operations on volume slices. To ensure that
the GUI is simple enough and not crowded with use-
less images, we pick the most three representative
slices along the X, Y , and Z directions. For this rea-
son, we used image entropy to calculate the quantity
of information in each slice. The slices with the high-
est entropy values are the ones containing the most
variations. So, we select the best one from each direc-
tion as the most informative slice. Through a simple
GUI view, as presented in Figure 2, the user can inter-
act with the slices to select regions that he is interested
in. He chooses the number of classes he wants to see,
GRAPP 2023 - 18th International Conference on Computer Graphics Theory and Applications
172

selects some voxels with the mouse, and affects them
to the corresponding groups.
Figure 2: The GUI with extracted slices and selected voxels.
3.2 Classes Generation from Labeled
Voxels
After the user decides what he wants to see, we used
the labeled voxels as training samples to classify the
volume voxels accordingly. The first step is to char-
acterize each voxel with a set of deep features using
the 3D CNN detailed above. Then, we used the incre-
mental classifier IDSVM (Incremental Discriminant
based Support Vector Machine) to classify the Whole
volumetric data. Both steps are detailed next.
3.2.1 Pretarained 3D CNN for Deep Features
Extraction
Designing the 3D CNN is a foundation step for the
proposed image-centric framework. In this section,
we detail the architecture of the novel pre-trained 3D
CNN. The proposed CNN is motivated by the bene-
fit of the amazing success of the 2D CNN to build 3D
pre-trained CNN without sacrificing data information.
As the 3D image is composed of a set of 2D slices,
weights obtained from training on 2D content can be
meaningful to describe volume voxels. So, the idea
is to transfer learning from a pre-trained 2D CNN to
a novel 3D CNN. Figure 3 shows the 3D CNN archi-
tecture. We designed a new architecture of the 3D
CNN inspired by the architecture of Resnet50 trained
with ImageNet. First, we create the input layer with-
out a restriction on the input size, as in the case of
Resnet50. As we said before, we want to minimize
the loss of information. Therefore, the input layer re-
ceives the 3D image without doing a resize. After
that, we limit the number of 3D convolutions to eight
layers.
Figure 3: The 3D CNN architecture.
Those layers are initialized with the weights of the
Resnet50. 2D weights can be defined as 2D matri-
ces. Therefore, we need to convert a 2D matrix into
Deep Interactive Volume Exploration Through Pre-Trained 3D CNN and Active Learning
173

a 3D tensor by filling the tensor and copying the val-
ues along one axis. The convolution receptive field is
7 ∗ 7 ∗ 7. Each 3D convolutional layer is proceeded
by a batch normalization layer and then the activa-
tion function. Since we want to use the 3D CNN as
a feature extractor for volumetric data, the model has
to be capable of extracting a set of features for each
voxel. So, the data have to be passed through all the
convolutions layers without resizing. For this reason,
we didn’t use pooling layers in the proposed archi-
tecture. For the same reason, we fixed the stride to
1, and the padding to SAME. As discussed before,
methods mostly use hand-crafted features. However,
the problem with those features is that they cannot ex-
tract voxel information very properly. Since present-
day volumetric data have some inherent noise asso-
ciated with them, losing information might prove to
be costly and may not properly classify the volume
data for volumetric rendering. Nevertheless, the pro-
posed model can generate a set of deep features for
each voxel while minimizing the loss of information
due to the use of the proposed 3D CNN. As a result, in
the proposed model, one significant advantage of us-
ing a 3D CNN is that generated features are not statics
but adapted to different used datasets.
3.2.2 Incremental Classifcation
After extracting deep features from the 3D image,
the IDSVM classifier is trained using the extracted
deep features of the user-selected voxels. The IDSVM
was proposed and described in detail in (Salhi et al.,
2022). It is motivated by building a separating hy-
perplane based on the merits of both discriminant-
based classifiers and the classical SVM. The IDSVM
calculates first the within-class scatter matrix and the
between-class scatter matrix in the input space to ex-
tract the global properties of the training distribu-
tion. Then, it integrates the resulting matrix into
the optimization problem of the SVM to consider
the local characteristics. The fundamental advantage
of our image-centric method is the combination be-
tween deep learning and active learning to achieve
efficiency and speed. Active learning is defined by
a combination of user interaction with incremental
classification. The utility of incremental classification
in the proposed method derives from the improve-
ment in computational complexity, both in terms of
needed memory and time. This is because the IDSVM
doesn’t require retraining each time a new voxel is se-
lected. Also, calculating the scatter matrices in the in-
put space results in minimizing required memory and
time. The classifier is capable of separating the user-
labeled training samples with a hyperplane placed in
an optimum way. Therefore, the whole 3D data is
classified efficiently, and the rendering result is shown
to the user in real time.
3.3 TF Generation Using Harmonic
Colors
Assigning optical properties to the voxel data in each
structure impacts strongly the final result. For this
reason, in the proposed method, the user does not
need to handle color and opacity, but values are auto-
matically generated using color harmonization, which
is a concept borrowed from the arts (Itten, 1961).
Consequently, the visual result can be rendered more
quickly and efficiently. In this study, the opacity is
calculated based on the user’s perception. To define
the appropriate color for voxel data, we need to de-
fine the hue (H), saturation (S), and lightness (V) val-
ues for the HSV color space.
• The hue value (H) for each voxel of each class is
calculated as follows.
H
v
g
= ξ
g
l
+ (ξ
g
h
− ξ
g
l
) × F
v
, g = 1...N. (1)
Where, ξ
g
l
and ξ
g
h
are the limits of the hue range
of each classe g, N is the number of groups, and
F
v
is the Gradient Factor of the voxel.
• The Saturation (S) is calculated for a group g ac-
cording to the spatial variance σ
g
. Since classes
having larger spatial variances cover a larger
viewing area compared to classes with smaller
spatial variances, we can assume that the classes
with smaller spatial variances need to have a more
saturated color to highlight them properly. Hence,
the saturation value for each class is calculated by:
S
g
=
1
1 + σ
2
g
, g = 1, . . . , N. (2)
• Similarly, we can intuitively find that voxel
classes closer to the center of the volume requires
to be brighter than voxel classes that are farther
from the center so that they are not overshadowed
by them. Hence, The lightness (V) of each class
is defined by:
V
g
=
1
1 + D
g
, g = 1, . . . , N. (3)
Here, D
g
denotes the distance between the cen-
troid of the group g and the center of the 3D im-
age. Using this method to assign the saturation
and brightness values, we can increase visualiza-
tion of voxel classes that are relatively more diffi-
cult to highlight.
GRAPP 2023 - 18th International Conference on Computer Graphics Theory and Applications
174

• The opacity of a voxel v belongs to a class g is
calculated as:
O = (1−
σ
2
g
maxσ
2
g
)×(1 +F
v
), g = 1, . . . , N. (4)
As we can see, the opacity value is calculated
based on the spatial variance. To avoid block-
ing the viewing of classes with smaller spatial
variances by those with larger spatial variances,
groups with smaller spatial variances will be as-
signed higher opacity values. In Addition, us-
ing the multiplication (1+ F
v
), the method allows
boundaries enhancement to reveal the embedded
structures.
4 RESULTS AND DISCUSSION
In this section, we first provide the details of the
datasets used to validate our approach and then
present a quantitative and qualitative comparison be-
tween the results of the proposed method and other
state-of-the-art techniques, including image-centric
(Khan et al., 2018), (Salhi et al., 2022) and data-
centric methods (Khan et al., 2015). To show the use-
fulness of our method, we used five datasets namely,
CT scans of an Engine, VisMale, Cross, Hydrogen,
and Foot to present the rendering results. Details of
the datasets are listed in Table 1.
Table 1: Details of used datasets and training times for each
system in seconds.
Dataset Dimensions
Data-
centric
Image-
centric
Ours
Hydrogene 128*128*128 119 4.667 0.035
VisMale 128*256*256 284 8.861 0.673
Cross 64*64*64 78 1.082 0.021
Foot 256*256*256 388 24.720 0.790
Engine 256*256*256 371 11.887 0.190
After training the CNN and extracting deep fea-
tures, we present a simple GUI to the user. The user
can select some voxels as regions of interest. The vox-
els of the selected regions are used to train the IDSVM
and classify the volume. The colored groups accord-
ing to the TF are then rendered in real time.
As noted before, due to the use of deep features
that well describe voxels, the system doesn’t need a
high number of voxels for training. Some selected
voxels from the user are good enough for an effi-
cient classification and visualization of the different
groups. Such a low number of training voxels is
reasonable here since, as we can see from the slices
shown in figure 4, the selection process is not easy
with small datasets like the Cross dataset, especially
when small classes are not visually distinguishable in
slices. Besides, using a low number of training vox-
els results in reducing the training time. Table 1 il-
lustrates the results of the comparison of the training
time required by the proposed system with a batch-
based image-centric (Khan et al., 2018) and a data-
centric method (Khan et al., 2015). As we said, the
proposed method doesn’t need a lot of training sam-
ples to achieve good visualization thanks to the use of
deep features. Besides, it makes use of incremental
classification. As a result, it can be seen from the Ta-
ble that it doesn’t need a lot of time to complete the
training. On the other hand, the data-centric method
takes a lot of time since the training process requires a
lot of training voxels (in the range of millions) (Khan
et al., 2015). In addition, even if the other method is
image-centric, using batch classification results in the
augmentation of required training times.
Figure 4 illustrates obtained rendering results for
different datasets from the comparative experiments.
As can be seen, the volumetric data are visualized
using the proposed deep-based method, and useful
structural information can be gathered from these re-
sults. As we can see, even for small datasets, the crit-
ical structures can be highlighted easily. Also, we
can see that the inner bones are visible for the foot
dataset. Besides, for the engine, the tubes are clearly
detected. This definitely depicts the effectiveness of
our method. Compared to the other results, the power
of deep features is apparent. Since the classification
is based on user interaction and the user can freely se-
lect whatever voxels he is interested in, the technique
is very flexible. Also, As a result of the use of incre-
mentality, it is easy to yield real-time rendering each
time the user selects new voxels or adds a new class.
To thoroughly evaluate the performance of the
proposed framework, besides visual results, we con-
ducted a quantitative evaluation using the Dice over-
Table 2: The obtained dice similarity results for each ap-
proach (best results are in bold, and second-best are empha-
sized).
Dataset
Batch
Image-
centric
Incremental
Image-
centric
Data-
centric
Ours
Hydrogene 0.5691 0.7491 0.7569 0.8452
VisMale 0.7088 0.7477 0.7101 0.8087
Cross 0.6733 0.8041 0.8924 0.9320
Foot 0.8045
0.84877
0.8153 0.8603
Engine 0.6584 0.8256 0.9195 0.9295
Deep Interactive Volume Exploration Through Pre-Trained 3D CNN and Active Learning
175
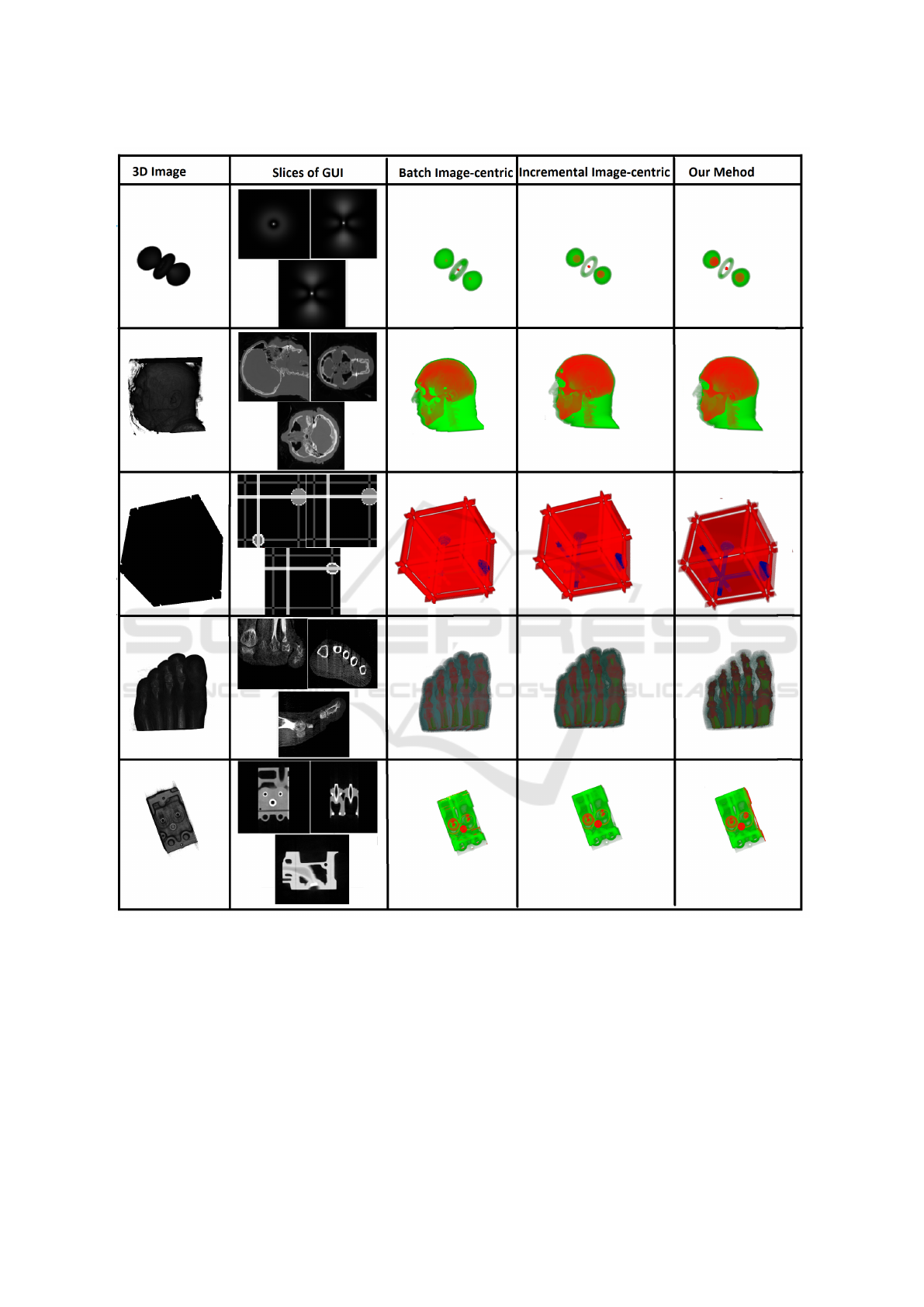
Figure 4: Comparison of rendering images with batch-based (Khan et al., 2018) and incremental-based (Salhi et al., 2022)
image-centric approaches using the same user-selected voxels from Slices of GUI.
lap coefficient. The dice coefficient metric compares
the obtained rendering results with the ground truth
to compute the accuracy using the following equa-
tion. As we can see from Table 2, results indicate that
the proposed technique achieves the best dice similar-
ity results compared to the other methods for all used
datasets. In addition, the proposed method achieves
an average dice similarity coefficient equal to 0.8751.
This value proves the efficiency of the proposed ap-
proach and makes it suitable for use in applications
that requires high precision, like the medical domain.
GRAPP 2023 - 18th International Conference on Computer Graphics Theory and Applications
176

5 CONCLUSIONS
In this paper, we tackle the problem of hand-crafted
feature learning limitations in the context of volume
rendering. We introduced a pre-trained 3D CNN deep
learning framework, consisting of a new architecture
inspired by Resnet50, that learns weights from the 2D
Resnet50 for initialization. The novel CNN allows
for gathering deeper information from the data vox-
els. We incorporate the 3D CNN into an incremental-
based image-centric method to improve the feature
learning process and classification efficiency. The
performance of the image-centric was evaluated on
many popular 3D datasets. Results were compared
against other methods. We demonstrated that the
new framework performs with the highest accuracy
on all three datasets. The empirical results con-
firmed that the 3D CNN improves the performance of
visualization-based classification. This framework al-
lows users to interact with an intuitive user interface
and control the final rendering results. Finally, we
compared the required training time for the proposed
system with other methods and showed that the pro-
posed CNN-based framework outperforms the other
methods in all experimented datasets. As a result, the
proposed method achieves real-time rendering of vi-
sual results while the users select regions of interest,
thanks to the use of incremental classification. In the
future, we aim to improve the network performance.
The proposed method has a few limitations that will
be worked on. In this approach, we worked with the
best slices along X ,Y , and Z directions to create a sim-
ple GUI without being crowded with unnecessary im-
ages. The choice of the slices is based only on en-
tropy. To ensure that we pick the best representative
ones, other criteria could also be used like informa-
tion gain or mutual information. Besides, the final re-
sult depends strongly on the user’s choice. Even if the
system needs to be used by a domain expert who is fa-
miliar with grayscale images and knows exactly what
he looks for, a bad choice does not provide satisfac-
tory results. So rather than restarting the system, the
elimination of some selected voxels needs to be taken
into consideration. As a result, using a decremental
classification could be useful in some cases to per-
form satisfactory results. Also, we can investigate the
effectiveness of the 3D CNN-based method to explore
volumetric data in real-time clinical applications.
REFERENCES
Athawale, T. M., Ma, B., Sakhaee, E., Johnson, C. R.,
and Entezari, A. (2020). Direct volume rendering
with nonparametric models of uncertainty. IEEE
Transactions on Visualization and Computer Graph-
ics, 27(2):1797–1807.
Berger, M., Li, J., and Levine, J. A. (2019). A generative
model for volume rendering. IEEE transactions on vi-
sualization and computer graphics, 25(4):1636–1650.
Childs, H., Brugger, E., Whitlock, B., Meredith, J., Ahern,
S., Pugmire, D., Biagas, K., Miller, M., Harrison, C.,
Weber, G. H., et al. (2012). Visit: An end-user tool for
visualizing and analyzing very large data.
Correa, C. and Ma, K.-L. (2009). The occlusion spec-
trum for volume classification and visualization. IEEE
Transactions on Visualization and Computer Graph-
ics, 15(6):1465–1472.
Correa, C. D. and Ma, K.-L. (2010). Visibility his-
tograms and visibility-driven transfer functions. IEEE
Transactions on Visualization and Computer Graph-
ics, 17(2):192–204.
Drebin, R. A., Carpenter, L., and Hanrahan, P. (1988). Vol-
ume rendering. ACM Siggraph Computer Graphics,
22(4):65–74.
Fogal, T. and Kr
¨
uger, J. H. (2010). Tuvok, an architecture
for large scale volume rendering. In VMV, volume 10,
pages 139–146.
Ge, F., No
¨
el, R., Navarro, L., and Courbebaisse, G. (2017).
Volume rendering and lattice-boltzmann method. In
GRETSI.
Guo, H., Mao, N., and Yuan, X. (2011). Wysiwyg (what
you see is what you get) volume visualization. IEEE
Transactions on Visualization and Computer Graph-
ics, 17(12):2106–2114.
Guo, Y., Wang, H., Hu, Q., Liu, H., Liu, L., and Ben-
namoun, M. (2020). Deep learning for 3d point
clouds: A survey. IEEE transactions on pattern anal-
ysis and machine intelligence, 43(12):4338–4364.
He, T., Hong, L., Kaufman, A., and Pfister, H. (1996).
Generation of transfer functions with stochastic search
techniques. In Proceedings of Seventh Annual IEEE
Visualization’96, pages 227–234. IEEE.
Hong, F., Liu, C., and Yuan, X. (2019). Dnn-volvis: Inter-
active volume visualization supported by deep neural
network. In 2019 IEEE Pacific Visualization Sympo-
sium (PacificVis), pages 282–291. IEEE.
Itten, J. (1961). The art of color the subjective experience
and objective rationale of color.
Khan, N. M., Ksantini, R., and Guan, L. (2018). A novel
image-centric approach toward direct volume render-
ing. ACM Transactions on Intelligent Systems and
Technology (TIST), 9(4):1–18.
Khan, N. M., Kyan, M., and Guan, L. (2015). Intuitive
volume exploration through spherical self-organizing
map and color harmonization. Neurocomputing,
147:160–173.
Kim, S., Jang, Y., and Kim, S.-E. (2021). Image-based
tf colorization with cnn for direct volume rendering.
IEEE Access, 9:124281–124294.
Kindlmann, G., Whitaker, R., Tasdizen, T., and Moller, T.
(2003). Curvature-based transfer functions for direct
volume rendering: Methods and applications. In IEEE
Visualization, 2003. VIS 2003., pages 513–520. IEEE.
Deep Interactive Volume Exploration Through Pre-Trained 3D CNN and Active Learning
177

Kniss, J., Kindlmann, G., and Hansen, C. (2002). Multi-
dimensional transfer functions for interactive volume
rendering. IEEE Transactions on visualization and
computer graphics, 8(3):270–285.
Li, J., Zhou, L., Yu, H., Liang, H., and Wang, L. (2007).
Classification for volume rendering of industrial ct
based on moment of histogram. In 2007 2nd IEEE
Conference on Industrial Electronics and Applica-
tions, pages 913–918. IEEE.
Maciejewski, R., Woo, I., Chen, W., and Ebert, D. (2009).
Structuring feature space: A non-parametric method
for volumetric transfer function generation. IEEE
Transactions on Visualization and Computer Graph-
ics, 15(6):1473–1480.
Morris, C. J. and Ebert, D. (2002). Direct volume render-
ing of photographic volumes using multi-dimensional
color-based transfer functions. In Proceedings of the
symposium on Data Visualisation 2002, pages 115–ff.
Ropinski, T., Praßni, J.-S., Steinicke, F., and Hinrichs, K. H.
(2008). Stroke-based transfer function design. In Vol-
ume Graphics, pages 41–48. Citeseer.
Salhi, M., Ksantini, R., and Zouari, B. (2022). A real-
time image-centric transfer function design based on
incremental classification. Journal of Real-Time Im-
age Processing, 19(1):185–203.
Sereda, P., Bartroli, A. V., Serlie, I. W., and Gerritsen, F. A.
(2006). Visualization of boundaries in volumetric data
sets using lh histograms. IEEE Transactions on Visu-
alization and Computer Graphics, 12(2):208–218.
Shi, N. and Tao, Y. (2019). Cnns based viewpoint estima-
tion for volume visualization. ACM Transactions on
Intelligent Systems and Technology (TIST), 10(3):1–
22.
Torayev, A. and Schultz, T. (2020). Interactive classification
of multi-shell diffusion mri with features from a dual-
branch cnn autoencoder.
Yang, F., Meng, X., Lang, J., Lu, W., and Liu, L. (2018).
Region space guided transfer function design for non-
linear neural network augmented image visualization.
Advances in Multimedia, 2018.
GRAPP 2023 - 18th International Conference on Computer Graphics Theory and Applications
178
