
Interaction-based Implicit Calibration of Eye-Tracking in an
Aircraft Cockpit
Simon Schwerd
a
and Axel Schulte
Institute of Flight Systems, Universität der Bundeswehr München, Neubiberg, Germany
Keywords: Eye-Tracking, Implicit Calibration, Aviation, Flight Deck.
Abstract: We present a method to calibrate an eye-tracking system based on cockpit interactions of a pilot. Many studies
show the feasibility of implicit calibration with specific interactions such as mouse clicks or smooth pursuit
eye movements. In real-world applications, different types of interactions often co-exist in the “natural”
operation of a system. Therefore, we developed a method that combines different types of interaction to enable
implicit calibration in operational work environments. Based on a preselection of calibration candidates, we
use an algorithm to select suitable samples and targets to perform implicit calibration. We evaluated our
approach in an aircraft cockpit simulator with seven pilot candidates. Our approach reached a median accuracy
between 2° to 4° on different cockpit displays dependent on the number of interactions. Differences between
participants indicated that the correlation between gaze and interaction position is influenced by individual
factors such as experience.
1 INTRODUCTION
Eye-tracking is an important tool to study human
factors in aircraft cockpits. In many simulator studies,
gaze measurement is used to analyse pilot attention
(van de Merwe et al., 2012; Ziv, 2016) or conduct
research about pilot cognition (Dahlstrom &
Nahlinder, 2009; Schwerd & Schulte, 2020; van de
Merwe et al., 2012). With ongoing development, it
might be used in real cockpits to complement "black
box" flight recorder information (Peysakhovich et al.,
2018) or to inform adaptive support systems (Brand
& Schulte, 2021; Honecker & Schulte, 2017). Robust
and accurate measurement of pilot gaze is
fundamental to these undertakings. Therefore, proper
calibration of the eye-tracking system plays an
important role (Nyström et al., 2013).
2 BACKGROUND
Calibration of eye-tracking systems requires multiple
pairs of calibration targets 𝑡
(
𝑥, 𝑦
)
and corresponding
measured gaze samples 𝑠
(
𝑥, 𝑦
)
. For explicit
calibration, a user is required to fixate predefined
a
https://orcid.org/0000-0001-6950-2226
calibration targets while gaze is measured. This time-
consuming process might decrease acceptance of eye-
tracking applications in aircraft cockpits. Further,
measurement accuracy can deteriorate during
operation due to head movements, blinking or a
change in the user’s relative position to the screen (M.
X. Huang et al., 2016; Sugano & Bulling, 2015),
which could go unnoticed without re-calibration.
With implicit calibration, no explicit user
cooperation is required, and calibration targets are
determined based on assumptions about probable or
required fixation. This idea was originally proposed
by Hornof and Halverson (2002), where participants
in an experiment had to fixate a specific display
position for task-relevant information which was used
to monitor gaze accuracy. Following this idea,
subsequent studies investigated implicit calibration
based on the correlation of gaze and interaction such
as mouse clicks (M. X. Huang et al., 2016; Sugano et
al., 2008), scene properties like saliency (Kasprowski
et al., 2019; Sugano & Bulling, 2015), moving objects
(Blignaut, 2017; Drewes et al., 2019; Pfeuffer et al.,
2013) or saccade properties (M. X. Huang & Bulling,
2019). Most of this research was conducted in the
context of eye-tracking applications for untrained
users, such as for webcams of internet users
Schwerd, S. and Schulte, A.
Interaction-based Implicit Calibration of Eye-Tracking in an Aircraft Cockpit.
DOI: 10.5220/0011657200003417
In Proceedings of the 18th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2023) - Volume 2: HUCAPP, pages
55-62
ISBN: 978-989-758-634-7; ISSN: 2184-4321
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
55

(Papoutsaki et al., 2017) or for displays in public
spaces (Khamis et al., 2016).
One of the most studied implicit calibration
methods is the correlation of gaze and mouse clicks.
Sugano et al. (2008) and Sugano et al. assumed, that
gaze and mouse click position align when the click
occurs and presented an algorithm that updated their
gaze estimation with every click. According to J.
Huang et al. (2012) the proximity of mouse cursor
and gaze depends on the current mode of interaction
(e.g. read or click) with a median distance of 70-80px
for mouse clicks. In a subsequent study, the authors
found, that the correlation of gaze and interaction is
stronger before than exactly at the moment of
interaction peaking at around 0.4s before interaction
(M. X. Huang et al., 2016). In a more recent study,
Zhang et al. (2018) implemented implicit calibration
combining clicks, touches and keypresses over
multiple devices. These studies showed the feasibility
of interaction-based implicit calibration but pointed
out two relevant problems: First, gaze data is usually
noisy, which challenges the basic assumption, that
gaze always aligns with an interaction. Second, task
context and individual differences cause inconsistent
alignment of gaze and interaction. Both these
observations suggest that the interaction-based
approach must be able to filter for correct gaze-
interaction alignments.
The mentioned research showed the feasibility of
implicit calibration. In most studies, the calibration is
usually based on one specific type of interaction or
scene property. From our review, we identified two
open questions: First, how different interactions can
be used in the same method for calibration. Second,
if the implicit calibration assumptions hold in the use
of human-machine-interfaces not specifically
designed for this use case. We are convinced that
implicit calibration will prove to be useful in
operational workplaces to avoid explicit calibration
and continuously verify eye-tracking quality. This
paper makes the following contributions: First, we
propose a method to select calibration target
candidates that integrates different types of
interactions. Second, we describe an algorithm, which
can process these different types in a unified manner.
Third, we evaluate the implementation of this system
in our aircraft cockpit simulator.
3 METHOD
We propose a method with three stages displayed in
Figure 1. The first step “Calibration Candidate
Selection” is a classification to identify different
types of interaction in natural human-system-
interaction that are suitable for implicit calibration.
After a calibration target and associated samples has
been identified, the second module “Sample
Selection” identifies a subset of samples that are
likely to be a fixation upon the assumed target. After
that, a suitable calibration procedure uses the new and
past selected samples to calibrate the system.
Figure 1: Calibration pipeline. Two stages of selection
result in a selection of samples and calibration targets for
calibration.
3.1 Selection of Calibration Candidates
To identify suitable calibration targets in a natural
human-machine interaction, we propose the
following approach: We think about interaction and
gaze measurements in terms of two parallel data
streams (see
Figure 2
): First, a gaze data stream, which
arrives at high frequency but possibly interrupted
(e.g., when the eye-tracker loses the track) and
second, interactions, which either happen at distinct
moments (e.g., click) or are continuous over a time
period (e.g., hold gesture on a touch screen).
Given this perspective, we propose three
categories to compute calibration targets and gaze
sample candidates: an interaction is either a
successor, companion, or precursor of a probable
fixation target. We define an interaction to be a
HUCAPP 2023 - 7th International Conference on Human Computer Interaction Theory and Applications
56

Figure 2: Gaze samples and interactions as parallel data
streams with three types of calibration target candidates.
successor when the interaction follows a probable
fixation target, for example mouse clicks, which
succeed a fixation on the click position. After
occurrence of a successor, the preceding gaze
samples are selected as calibration candidates. Next,
we define an interaction to be a companion when it
likely occurs together with its associated fixation
target. As an example, consider a slider widget in a
desktop application that controls a numerical value
displayed next to it. A user needs to fixate the
changing number when he uses his mouse to slide,
thus, it can be considered a fixation target. In this
case, all gaze samples measured during an active
companion interaction are calibration candidates.
Finally, we define an interaction to be a precursor
when the interaction occurs before a probable
calibration target. Many interactions with the
interface cause changes that are verified by the user
just after interaction. To give a flight deck example,
when a pilot moves the gear of their plane by control
input, he confirms the position of the gear a few
seconds after his input. The action and confirmation
of the expected result could be used for implicit
calibration, which is especially useful when the
interaction is spatially or temporarily dislocated from
the location where the change is displayed (e.g.,
control input and delayed indication of gear).
3.2 Sample Selection
The calibration candidate selection returns an
assumed fixation position and associated gaze sample
candidates for calibration that were measured either
before, during or after the interaction. Since this data
set is often noisy, we need to identify the most
probable subset of samples representing the fixation
on the assumed target. For this, we propose a simple
algorithm inspired by RANSAC (Fischler & Bolles,
1981), which selects samples that are in both spatial
and temporal proximity to the interaction.
Pseudocode is depicted in Algorithm 1.
INTERACTION -TIME -CONSENSUS
Input: gaze-samples, calibration-target, interaction-time, threshold-dist, threshold-time,
minimum-samples
Result: Best samples for calibration
all-consensus-groups
← empty list
for
sample-candidate
in
gaze-samples
do:
consensus-group
←
gaze-samples
as selected by
candidate selection
for
consensus-candidate
in
consensus-group
do:
spatial-dist
← SPATIAL_DISTANCE (
consensus-candidate
,
sample-candidate
)
time-dist
←TIME_DISTANCE_ABSOLUTE(
consensus-candidate
,
interaction-time
)
if spatial-dist
>
threshold-dist
or
time-dist
>
threshold-time
do:
REMOVE
consensus-candidate
from
consensus-group
if
SIZE(consensus-group) < minimum-samples
do:
continue
ADD
consensus-group
to
all-consensus-groups
return consensus-group with lowest time to interaction
Algorithm 1: Algorithm to select most probable subset of
fixation samples for calibration target.
3.3 Calibration
Optimally, the sample selection algorithm returns a
set of suitable pairs of calibration targets 𝑡
(
𝑥, 𝑦
)
and
measured gaze samples 𝑠
(
𝑥, 𝑦
)
while omitting
targets with noisy measurements or insufficient
sample size. Then, gaze can be calibrated when
enough of these pairs have been identified. The
method of calibration is flexible and depends on the
use-case and desired fitting attributes. In the
following, we present an experiment where we
collected data in an experiment and applied a linear
calibration function.
4 EXPERIMENT
To evaluate our approach, we conducted an
experiment in a research cockpit simulator
resembling a generic fast jet cockpit (see Figure 3),
which is normally used to evaluate human-autonomy
teaming applications (e.g., (Lindner & Schulte,
2020)). The cockpit contains three touchscreens and
a Head-Up-Display (HUD) projected into the visuals
of the outside world. The participant’s gaze was
measured with a commercially available four-camera
system connected to the simulation software
(SmartEye Pro 0.3MP) and gaze was tracked over the
three touchscreen displays and the HUD.
In the experiment, we processed the uncalibrated
screen positions provided by the eye-tracking system
consisting of x- and y-coordinate and the associated
screen. The basic idea of the experiment was to
Interaction-based Implicit Calibration of Eye-Tracking in an Aircraft Cockpit
57

collect natural interaction data and uncalibrated gaze
measurements in a flight mission, which was then
used to perform implicit calibration. Results of this
process were compared to the results of a baseline
calibration based on a conventional 9-point
calibration procedure.
4.1 Calibration Targets
There are a great number of different controls and
displays in the cockpit simulator. The participants
controlled their aircraft via throttle, stick, and touch
interactions. Possible touch interactions were tap,
hold, drag, and pinch dependent on the control
element. From these different touch interactions, we
used all taps as successors, and all holds as
companions. Drag and pinch were not used. In the
following, we want to give a brief overview of the
most important elements on the touchscreen, which
are also displayed in Figure 3.
The tactical map in the central touchscreen can
be used for navigation and creation of mission tasks.
It displays the aircraft, all unmanned systems as well
as tactical objects and mission information. The map
can be dragged and zoomed. It is possible to interact
with tactical elements (e.g., building or waypoint)
by tapping on the respective element, which is
followed by a pop-up context menu used to plan
mission tasks
(e.g., reconnaissance). Taps were used as
predecessors.
On the left side display, the main interaction
element is the mission plan timeline. After the
creation of a task in the map, it can be inserted into
the timeline by tapping a position within the timeline
after which a task box moves to its position from the
bottom of the screen. Taps were used as successors.
The autopilot control can be opened by tapping
on the associated button in the side bar of the central
display. The control contains buttons to increase and
decrease autopilot speed, altitude and heading as well
as buttons to engage autopilot modes. The numeric
values can be adjusted by either tap or hold
interactions on the increase and decrease buttons. The
calibration target of each interaction lies on the
position of the value display. Taps and holds were
used as successor and companions, respectively.
The HUD shows several different flight
parameters of the aircraft. For implicit calibration, we
used the air brake indicator in the centre of the
display. The participants controlled the air brake via
a throttle button and the indicator in the shows its
current position as illustrated by Figure 3. The
interaction to control the air brake is considered a
predecessor.
Figure 3: Simulator (top center) with relevant interaction elements: Mission timeline (top left), HUD air brake indicator (top
right), autopilot control (bottom left), tactical map (bottom center) and context menu (bottom right)
HUCAPP 2023 - 7th International Conference on Human Computer Interaction Theory and Applications
58

4.2 Experimental Task
The experiment contained different tasks for the
participants to trigger interactions on all displays.
Before take-off, participants were asked to plan a
mission, which required the creation of several tasks
for their aircraft and a UAV. This included an
interaction with the mission timeline. With their own
aircraft, they had to take-off and fly over several way
points or tactical objects, while their UAV
investigated four different locations on the map. After
the take-off, participants received messages with
instructions to program the autopilot with given
values. During the flight, the UAV sent pictures
which had to be classified in two categories. The
participant landed again at the airport after
completion of all waypoints.
4.3 Participants & Procedure
We conducted the experiment with seven participants
(all male, 𝜇
=24.9𝑦). Four participants were
students of aeronautical engineering and three were
research assistants. All participants had prior
experience in handling the simulator. In the beginning
the participants received an introduction to the
simulator and the specific tasks necessary to complete
the experimental requirements. Then, each
participant had to complete three training missions to
get familiar with the mission tasks. Before each
mission there was a briefing in which the tasks and
circumstances were demonstrated. Prior to the
experimental mission, we collected validation data
based on a 9-point validation on every screen. After
this data collection, the participant received a briefing
for the experimental mission, which followed on the
briefing.
4.4 Data Processing
During the 9-point validation procedure, we collected
100 samples for 9 points on each display. The error
was computed by average Euclidian distance of each
sample to the calibration target. In the experiment, we
logged the following data: (1) position and timestamp
of uncalibrated gaze measurements and (2) position,
timestamp, type, and associated display element (e.g.,
autopilot value, map) of interaction. For calibration,
we computed the constants that optimized error given
the application of the following function to the
samples for both x- and y-coordinates:
𝑓
(𝑥) = 𝑎
+ 𝑎
𝑥
(1)
For the HUD, we used the following function
since there was only one possible calibration point in
the centre of the display:
𝑓
(𝑥) = 𝑎
+ 𝑥
(2)
Note, that we computed the calibration
parameters for each display independently.
5 RESULTS
First, we aimed to identify the optimal set of
parameters for the sample selection algorithm. After
selecting a set of parameters, we evaluated how many
calibration targets and samples were selected for
calibration. Finally, we compared calibration
performance of implicit calibration with 9-point
calibration.
5.1 Optimal Parametrization of the
Selection Algorithm
The algorithm presented in section 3.2 expects three
parameters: distance threshold, time threshold and
minimum number of samples. We performed a grid
search to identify optimal parameters. We
tested the combinations of the following
parameters: distance threshold
[
1.0, 1.5, 2.0
]
° ,
time threshold
[
0.5, 1.0, 1.5, 2.0
]
𝑠 and minimum
samples [10, 15, 20, 25] . We found varying
parameters for the participants suggesting individual
differences in the gaze-interaction correlation. Also,
an individual random component in gaze
measurement could influence optimal distance
threshold because a low threshold filters fixations
with high variance. For the following analysis, we
selected a set of parameters returning the best median
calibration performance: distance threshold of 2.0°,
time threshold of 2.0𝑠 and minimum samples of 15.
These parameters were used for all participants to
generate the following results.
5.2 Interactions
Interaction with each display differed in frequency as
shown by Table 1. Participants mainly interacted by
taps because this was the primary way to operate the
system. In addition, some participants did not use a
hold interaction to control the autopilot but preferred
to tap the buttons multiple times, which is one reason
for the high variations of successors and companions
in the centre display.
Interaction-based Implicit Calibration of Eye-Tracking in an Aircraft Cockpit
59

Table 1: Number of occurrences of the different forms of interactions, formatted as “Mean (Standard Deviation)”.
There were very few samples for predecessor
interaction on the HUD because was only controlled
to land the aircraft. One participant did not use the air
brake at all. In average, the sample selection removed
15.8% of successors and 81.5% of companions
because no valid sample group was found.
Surprisingly, not many successor interactions on the
left and right display were removed.
5.3 Calibration Performance
We computed calibration constants with the selected
calibration targets and samples from the experiment.
Using these constants, we calibrated the data
collected in the 9-point validation data of each
display. Then, we compared the error of this
implicitly calibrated data with uncalibrated and point-
calibrated data. Results are displayed in Figure 4.
There are improvements against no calibration for
most participants on most displays but there are also
instances where our method deteriorated the gaze
measurement. Table 2 reports absolute and relative
values for implicit calibration. Median accuracy is
between 2.1° on the left display to 3.8° on the HUD.
For very few cases, improvement by implicit
calibration was comparable to point calibration (e.g.,
see Center, P7 or Side Left P6). Standard deviation is
high on the HUD, because of a great implicit
calibration error for participant 2 and 4.
Table 2: Median accuracy and relative improvement of
implicit calibration.
Display Median Accuracy
(
Std
)
Median relative
im
p
rovement
(
Std
)
Cente
r
2.2° (0.96°
)
44%
(
65%
)
Side Left
2.1°
(
1.03°
)
22%
(
41%
)
Side Ri
g
ht
2.8° (0.96°
)
36%
(
36%
)
HUD
3.8° (3.67°
)
0%
(
136%
)
5.4 Discussion
The results showed that the implicit calibration
method can improve average accuracy on the 9-point
validation but did not reach point calibration quality.
Therefore, we conclude that the basic assumptions of
implicit calibration do hold for interactions in work
environments like an aircraft cockpit, but there are
limitations to the presented approach. First, the
parameter search revealed that the algorithm had
different optimal parameters for different participants
which indicates an individual component in implicit
calibration. We assume, that two factors are
responsible for these individual components. First,
participants had different levels of training on the
system e.g., the research assistants developed parts of
this prototype and students had only experience from
prior experiments. When a user is very experienced,
he anticipates system reactions and might be very
quick in his interaction. Second, individual factors
such as computer game experience might also be a
confounding factor influencing the correlation
between gaze and interaction. Apart from individual
difference, another problem is the varying frequency
of different interaction types. In our use-case,
successor interactions (taps on the central
touchscreen) occurred far more often than other forms
and therefore had the largest influence on the results.
Contrary, the HUD had very few interactions on one
possible calibration target, which was problematic in
two ways: First, when our method falsely selects
samples where the implicit calibration assumption
does not apply, there is a great accuracy degradation
due to false calibration. The risk of false calibration
is especially high when sample size is low. Second,
when there are very few targets on the screen (e.g., on
the HUD), calibration procedure might overfit areas
where most interactions happen.
Our experiment had two main limitations. First,
although all participants had prior experience on the
simulator, the degree of proficiency differed, which
could also explain individual calibration differences.
Second, the experimental design did not allow to
analyse the problem of continuous deterioration
during measurement. We collected validation data
before the experiment, so gaze tracking quality
change during the experiment could influence
implicit calibration performance.
HUCAPP 2023 - 7th International Conference on Human Computer Interaction Theory and Applications
60
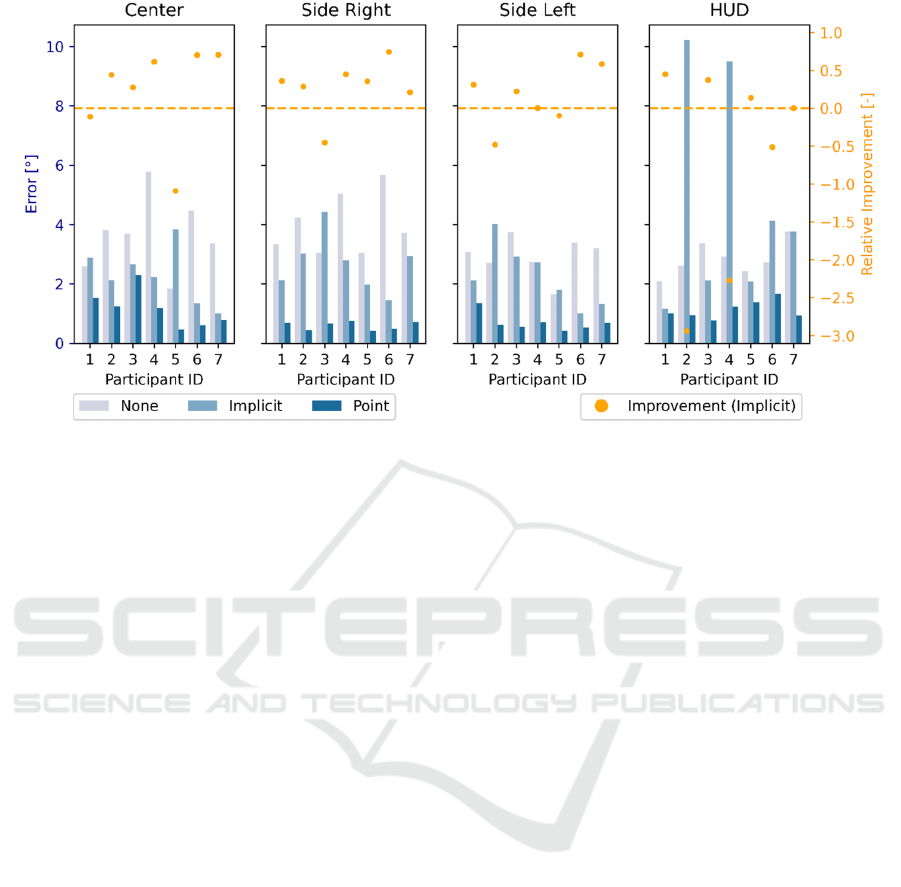
Figure 4: Comparison of no, implicit and point calibration on each display with 9-point validation data (bar, blue/gray).
Relative improvement is displayed only for implicit calibration (point, orange). Note: There were no samples for Participant
7 on the HUD.
6 CONCLUSION
Our approach demonstrated the feasibility and the
challenges of implicit calibration in work
environments, specifically on flight deck. We are
planning to improve the current approach by
integrating smooth-pursuit calibration, which in our
case, could be implemented for moving objects on the
map or in the external view. Another possible
improvement is to extent the predecessor interactions
based on informed use cases of a professional pilot.
Since pilot interaction is standardized to a high
degree, there are many tasks in the cockpit that could
be leveraged for implicit calibration like for example
take-off procedures or checklists.
REFERENCES
Blignaut, P. (2017). Using smooth pursuit calibration for
difficult-to-calibrate participants. Journal of Eye
Movement Research, 10, 1–13. https://doi.org/
10.16910/jemr.10.4.1
Brand, Y., & Schulte, A. (2021). Workload-adaptive and
task-specific support for cockpit crews: design and
evaluation of an adaptive associate system. Human-
Intelligent Systems Integration, 3(2), 187–199.
https://doi.org/10.1007/s42454-020-00018-8
Dahlstrom, N., & Nahlinder, S. (2009). Mental Workload
in Aircraft and Simulator During Basic Civil Aviation
Training. The International Journal of Aviation
Psychology, 19(4), 309–325. https://doi.org/10.1080/
10508410903187547
Drewes, H., Pfeuffer, K., & Alt, F. (2019). Time- and
Space-Efficient Eye Tracker Calibration. In ETRA ’19,
Proceedings of the 11th ACM Symposium on Eye
Tracking Research & Applications. Association for
Computing Machinery. https://doi.org/10.1145/
3314111.3319818
Fischler, M. A., & Bolles, R. C. (1981). Random Sample
Consensus: A Paradigm for Model Fitting with
Applications to Image Analysis and Automated
Cartography. Commun. ACM, 24(6), 381–395.
https://doi.org/10.1145/358669.358692
Honecker, F., & Schulte, A. (2017). Automated Online
Determination of Pilot Activity Under Uncertainty by
Using Evidential Reasoning. In D. Harris (Ed.),
Engineering Psychology and Cognitive Ergonomics:
Cognition and Design (pp. 231–250). Springer
International Publishing.
Hornof, A. J., & Halverson, T. (2002). Cleaning up
systematic error in eye-tracking data by using required
fixation locations. Behavior Research Methods,
Instruments, & Computers : A Journal of the
Psychonomic Society, Inc, 34(4), 592–604.
https://doi.org/10.3758/bf03195487
Huang, J., White, R., & Buscher, G. (2012). User see, user
point: Gaze and cursor alignment in web search. In
Proceedings of the SIGCHI Conference on Human
Factors in Computing Systems (pp. 1341–1350).
https://doi.org/10.1145/2207676.2208591
Huang, M. X., & Bulling, A. (2019). SacCalib. In K. Krejtz
& B. Sharif (Eds.), Proceedings of the 11th ACM
Symposium on Eye Tracking Research & Applications
Interaction-based Implicit Calibration of Eye-Tracking in an Aircraft Cockpit
61

(pp. 1–10). ACM. https://doi.org/10.1145/3317956.
3321553
Huang, M. X., Kwok, T. C., Ngai, G., Chan, S. C., &
Leong, H. V. (2016). Building a Personalized, Auto-
Calibrating Eye Tracker from User Interactions. In
CHI ’16, Proceedings of the 2016 CHI Conference on
Human Factors in Computing Systems (pp. 5169–5179).
Association for Computing Machinery.
https://doi.org/10.1145/2858036.2858404
Kasprowski, P., Harezlak, K., & Skurowski, P. (2019).
Implicit Calibration Using Probable Fixation Targets.
Sensors (Basel, Switzerland), 19(1). https://
doi.org/10.3390/s19010216
Khamis, M., Saltuk, O., Hang, A., Stolz, K., Bulling, A., &
Alt, F. (2016). TextPursuits: Using Text for Pursuits-
Based Interaction and Calibration on Public Displays.
In UbiComp ’16, Proceedings of the 2016 ACM
International Joint Conference on Pervasive and
Ubiquitous Computing (pp. 274–285). Association for
Computing Machinery. https://doi.org/10.1145/
2971648.2971679
Lindner, S., & Schulte, A. (2020). Human-in-the-Loop
Evaluation of a Manned-Unmanned System Approach
to Derive Operational Requirements for Military Air
Missions. In D. Harris & W.-C. Li (Eds.), Engineering
Psychology and Cognitive Ergonomics. Cognition and
Design (pp. 341–356). Springer International
Publishing.
Nyström, M., Andersson, R., Holmqvist, K., & van de
Weijer, J. (2013). The influence of calibration method
and eye physiology on eyetracking data quality.
Behavior Research Methods, 45(1), 272–288.
https://doi.org/10.3758/s13428-012-0247-4
Papoutsaki, A., Laskey, J., & Huang, J. (2017).
Searchgazer: Webcam Eye Tracking for Remote
Studies of Web Search. In R. Nordlie (Ed.), ACM
Digital Library, Proceedings of the 2017 Conference
on Conference Human Information Interaction and
Retrieval (pp. 17–26). ACM. https://doi.org/
10.1145/3020165.3020170
Peysakhovich, V., Lefrançois, O., Dehais, F., & Causse, M.
(2018). The Neuroergonomics of Aircraft Cockpits:
The Four Stages of Eye-Tracking Integration to
Enhance Flight Safety. Safety, 4(1), 8.
https://doi.org/10.3390/safety4010008
Pfeuffer, K., Vidal, M., Turner, J., Bulling, A., &
Gellersen, H. (2013). Pursuit Calibration: Making Gaze
Calibration Less Tedious and More Flexible. In
UIST ’13, Proceedings of the 26th Annual ACM
Symposium on User Interface Software and Technology
(pp. 261–270). Association for Computing Machinery.
https://doi.org/10.1145/2501988.2501998
Schwerd, S., & Schulte, A. (2020). Experimental
Validation of an Eye-Tracking-Based Computational
Method for Continuous Situation Awareness
Assessment in an Aircraft Cockpit. In D. Harris & W.-
C. Li (Eds.), Lecture Notes in Computer Science.
Engineering Psychology and Cognitive Ergonomics.
Cognition and Design (Vol. 12187, pp. 412–425).
Springer International Publishing. https://doi.org/
10.1007/978-3-030-49183-3_32
Sugano, Y., & Bulling, A. (2015). Self-Calibrating Head-
Mounted Eye Trackers Using Egocentric Visual
Saliency. In C. Latulipe, B. Hartmann, & T. Grossman.
(Eds.), Proceedings of the 28th Annual ACM
Symposium on User Interface Software & Technology
(pp. 363–372). ACM. https://doi.org/10.1145/
2807442.2807445
Sugano, Y., Matsushita, Y., & Sato, Y. (2013).
Appearance-based gaze estimation using visual
saliency. IEEE Transactions on Pattern Analysis and
Machine Intelligence, 35(2), 329–341. https://
doi.org/10.1109/TPAMI.2012.101
Sugano, Y., Matsushita, Y., Sato, Y., & Koike, H. (2008).
An Incremental Learning Method for Unconstrained
Gaze Estimation. European Conference on Computer
Vision, 5304, 656–667. https://doi.org/10.1007/978-3-
540-88690-7_49
van de Merwe, K., van Dijk, H., & Zon, R. (2012). Eye
Movements as an Indicator of Situation Awareness in a
Flight Simulator Experiment. The International
Journal of Aviation Psychology, 22(1), 78–95.
https://doi.org/10.1080/10508414.2012.635129
Zhang, X., Huang, M. X., Sugano, Y., & Bulling, A.
(2018). Training Person-Specific Gaze Estimators from
User Interactions with Multiple Devices. In R. Mandryk,
M. Hancock, M. Perry, & A. Cox (Eds.), Proceedings
of the 2018 CHI Conference on Human Factors in
Computing Systems (pp. 1–12). ACM. https://
doi.org/10.1145/3173574.3174198
Ziv, G. (2016). Gaze Behavior and Visual Attention: A
Review of Eye Tracking Studies in Aviation. The
International Journal of Aviation Psychology, 26(3-4),
75–104. https://doi.org/10.1080/10508414.2017.
1313096
HUCAPP 2023 - 7th International Conference on Human Computer Interaction Theory and Applications
62
