
Diverse Level Generation for Tile-Based Video Game using Generative
Adversarial Networks from Few Samples
Soichiro Takata, Yuichi Sei
a
, Yasuyuki Tahara
b
and Akihiko Ohsuga
c
Department of Informatics, The University of Electro-Communications, Chofu, Tokyo, Japan
Keywords:
Procedural Content Generation, Generative Adversarial Networks, Deep Learning.
Abstract:
The procedural generation of levels in video games has been studied mainly to reduce the burden on producers.
In recent years, methods based on deep learning have been attracting attention. In level generations with deep
learning, GAN-based methods have achieved some success in tile-based video games, but the preparation of
the dataset has been an issue. In this study, we investigate a method to acquire a model that can generate
various levels by learning a GAN from only a small amount of data. It was confirmed that a greater variety
and lower playability of levels can be generated than with conventional methods by quantitative evaluation of
the levels generated by the proposed methods. In addition, the model learned by the proposed method can
generate levels that reflect the objectives more strongly than the conventional method by using CMA-ES to
search for latent variables.
1 INTRODUCTION
Research on automatic game content creation tech-
nology, known as Procedural Content Generation
(PCG), has been active since the birth of video games.
Among video game content, levels are directly related
to the difficulty and fun of a game, but the cost of
manually generating many levels is high. Therefore,
many studies on automatic level generation are being
conducted with the motivation of reducing the bur-
den on game creators. In recent years, PCG has also
been used to develop an environment for evaluating
and learning game AI (Justesen et al., 2018).
With the development of deep generative models,
deep learning has been increasingly used in PCG (Liu
et al., 2020). In tile-based video games, level genera-
tion using GANs, one of the deep generative models,
has been successful. However, the cost of preparing
data sets for training GANs is an issue, and it is gen-
erally difficult to train generators that generate diverse
levels from a few samples. In video game level gen-
eration models, the ability to generate diverse levels
is important to create different game experiences or to
create levels that are consistent with a concept from
a variety of levels. A variety of levels is also neces-
a
https://orcid.org/0000-0002-2552-6717
b
https://orcid.org/0000-0002-1939-4455
c
https://orcid.org/0000-0001-6717-7028
sary to evaluate and improve the generalization per-
formance of AI. Generators with neural networks can
generate a large amount of data in parallel, so if a va-
riety of levels can be generated, the desired level can
be selected from among many candidates.
In this study, we investigate a learning method
for GANs that can generate a variety of levels from
only a small amount of training set. Learning a gen-
erator that can generate diverse levels makes it pos-
sible to not only select good levels from generated
levels but also use more effectively the level gener-
ation method that reflects the objective by optimiz-
ing latent variables as inputs to the GAN (Volz et al.,
2018). In this paper, we proposed a data augmentation
method that adds levels that satisfy the constraints
among the levels generated by GAN as training data
and regularization terms in GAN training that facili-
tate the exploration of diverse levels. We prepare sev-
eral evaluation indicators for quantitative evaluation
and the experimental results showed that the model
trained by the proposed method was able to generate
more diverse levels than the model trained by the con-
ventional method. Although the playability was re-
duced, it was quantitatively confirmed that the model
trained by the proposed method was able to gener-
ate more diverse levels than the one by conventional
methods. We also confirmed that models trained by
the proposed method can generate playable and more
objective-reflected levels than conventional methods
326
Takata, S., Sei, Y., Tahara, Y. and Ohsuga, A.
Diverse Level Generation for Tile-Based Video Game using Generative Adversarial Networks from Few Samples.
DOI: 10.5220/0011666200003393
In Proceedings of the 15th International Conference on Agents and Artificial Intelligence (ICAART 2023) - Volume 3, pages 326-333
ISBN: 978-989-758-623-1; ISSN: 2184-433X
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)

by exploring the latent space.
This paper is organized as follows. Section 2 pro-
vides research backgrounds on PCG with deep learn-
ing. Section 3 describes the proposed method, fol-
lowed by experiments and results in Section 4. Fi-
nally, we conclude the paper and discuss future work.
2 BACKGROUND
2.1 Procedural Content Generation
(PCG)
The procedural generation of video game content,
called Procedural Content Generation, has been stud-
ied for many years, and a variety of game content
has been generated by algorithms. Within the field of
PCG, game level generation is the most popular, and
many studies have targeted 2D tile-based games such
as Super Mario Bros. side-scrolling action games
and exploration-based action games called roguelike
games. (Nelson, 2016). In recent years, deep learn-
ing has achieved remarkable results in content gener-
ation, such as images and text. Thus, its usefulness
in the field of PCG is expected to increase, and re-
search on the use of deep generative models and deep
reinforcement learning for game content generation
is gaining momentum (Liu et al., 2020; Gissl
´
en et al.,
2021; Bontrager and Togelius, 2021; Khalifa et al.,
2020).
2.2 Generative Adversarial
Networks(GAN)
Adversarial Generative Network (GAN), one of the
generative models based on deep learning, has been
actively studied mainly as a generative model for
images since it was proposed by Goodfellow et al.
(Goodfellow et al., 2014) in 2014 and has achieved
remarkable results in image generation. In a basic
GAN, in addition to the generator, a neural network
that generates data, a discriminator, a network that
discriminates between data generated by the gener-
ator and real data, is trained alternately to make the
distribution of data generated by the generator closer
to the distribution of real data. This is done by al-
ternately training the discriminator, which is a net-
work that discriminates between the data generated
by the generator and the real data. Specifically, the
generator G is learned through a minimax game using
the value function V(D, G) formulated in the form of
the equation (1).
min
D
max
G
V(D,G) = E
x∼p
data
[log D(x)]
+ E
z∼p
z
[log D(G(z))]
(1)
2.3 Procedural Content Generation
using Generative Adversarial
Networks
In recent years, research on level generation using
GANs has been successful. Volz et al. (Volz et al.,
2018) used DCGAN (Radford et al., 2015) to gen-
erate levels for Super Mario Bros. and proposed a
method to generate levels that satisfy specified ob-
jectives by optimizing latent variables in the GAN
using Covariance Matrix Adaption Evolution Strat-
egy (CMA-ES) (Hansen et al., 2003), a black box
optimization method based on evolutionary compu-
tation. The proposed method generates a level that
satisfies the specified objective by optimizing latent
variables of the GAN. Torrado et al. (Rodriguez Tor-
rado et al., 2020) performed level generation in the
Zelda environment of the GVGAI Framework (Perez-
Liebana et al., 2018) using a model based on Self-
Attention in SAGAN (Zhang et al., 2018) for the gen-
erator and discriminator. By combining the informa-
tion on the number of tiles on each level with the
Self-Attention Map and performing conditional gen-
eration, it was shown that level generation with higher
playability and a lower percentage of duplicated lev-
els were achieved than with conventional DCGAN
generation. A method for learning GANs from a
small number of data by adding data generated by
the generator as training data during the GAN train-
ing process is also proposed, and it is reported that
47% of the 15,000 levels generated were playable and
60.3% were duplicates. In addition, GAN-based level
generation methods have been studied for various tile-
based video games (Awiszus et al., 2020; Hald et al.,
2020; Park et al., 2019; Steckel and Schrum, 2021;
Kumaran et al., 2020).
3 METHOD
In this study, we aim to generate a variety of levels
in tile-based video games using GANs from only a
small number of training data. We propose a method
that focuses on a loss function during model training
and a better augmentation of training data with GAN-
generated data.
Diverse Level Generation for Tile-Based Video Game using Generative Adversarial Networks from Few Samples
327

3.1 Data Augmentation with Generated
Levels
This study diversifies the training data by adding the
levels generated to the dataset during the GAN train-
ing process, as in the bootstrap method of Torrado et
al, so that the generator can generate a variety of data.
In this study, we propose two methods of data aug-
mentation.
3.1.1 Conventional Bootstrap Method
In a previous work (Rodriguez Torrado et al., 2020),
the bootstrap method was proposed to improve the
diversity of the training set by periodically adding
playable levels to the training set during model train-
ing. In this method, the generated playable levels are
mapped into a two-dimensional space using PCA, and
then clustered using the Elbow and k-means methods,
and the level closest to the center of gravity of each is
selected and added to the training set.
3.1.2 Method 1: Bootstrap with Filtering
An overview of this method is shown in Figure 1.
Conventional bootstrap method was a method to in-
Figure 1: An overview of proposed method 1.
crease the number of training data by adding playable
data to the dataset during the training of the GAN.
This method does not compare the data to be added
to the dataset with the data in the dataset, which may
result in the levels in the dataset being similar to each
other. To avoid the problem of biased data in the
dataset, this method compares all levels in the dataset
with the levels to be added when adding levels, and
adds only those with a large hamming distance (the
number of tiles of different types placed at the same
location when two levels are compared). This would
add more novelty to the level and deal with the issue
of bias in the dataset. It is possible that a better crite-
rion could be used to reduce the bias of the data, but
that is a subject for future work. In this study, we used
a simple hamming distance criterion that is applicable
to all types of 2D tile-based games.
3.1.3 Method 2: Separeted Augmenration and
Training
An overview of this method is shown in Figure 2.
Figure 2: An overview of proposed method 2.
In the method with bootstrap, even with the pro-
cess of Method 1, if the distribution of data in the
dataset is biased, a cycle could occur in which the
data to be generated will also be biased. Therefore,
we propose a method to create and train a less bi-
ased dataset by separating the training part of the
GAN from the augmentation of the training data. In
this method, the GAN used for data augmentation is
learned from the original data, and the playable levels
generated by the GAN are used to train a new GAN
model. This method is inspired by previous work
(Park et al., 2019).
In this method, two types of models are prepared.
An augmentation model, which performs data aug-
mentation, and a performance model, which learns
with the augmented data. The augmentation model
is trained by augmenting data using training set for
the augmentation model according to Method 1, and
the levels bootstrapped by the augmentation model
is also added to training set for the performance
model. When the size of training set of the perfor-
mance model is large enough, the performance model
is trained from the training set. As the augmenta-
tion model is trained, training set for the augmenta-
tion model may become biased, but the weights of the
learned model and the initialization of training set for
the augmentation model are periodically performed to
ensure that the bias does not worsen. This will re-
sult in a less biased training set for the performance
model, which can be used to train GANs from a wide
variety of levels.
3.2 Diversity Loss
In order to generate various levels in the GAN train-
ing process, a regularization term that maximizes the
L1 distance between generated data in a minibatch
is added to the loss function during training. In the
implementation, it averages the L1 distance between
the two samples in the minibatch and adds the term
ICAART 2023 - 15th International Conference on Agents and Artificial Intelligence
328

weighted by the coefficient λ
div
to the generator’s loss
function.
We propose to train GAN by gradient descent ac-
cording to following equation (3), (4), which is the
Hinge Adversarial Loss (Lim and Ye, 2017) plus a
regularization term L
div
. L
D
and L
G
are loss functions
by minibatch of the discriminator D and generator G
respectively. x is sampled from training set, z is sam-
pled from standard normal distributions and m is the
size of the minibatch.
This regularization term is expected to facilitate
the exploration of levels different from the levels in
training set in the GAN learning process.
L
div
= −λ
div
1
m − 1
m−1
X
i=0
|G(z
(i)
) −G(z
(i+1)
)| (2)
L
D
=
1
m
m
X
i=0
[ − min(0,−1 + D(x
(i)
))
− min(0, −1 − D(G(z
(i)
)))]
(3)
L
G
= [
1
m
m
X
i=0
[−D(G(z
(i)
))] + L
div
] (4)
4 EXPERIMENTS AND RESULTS
We evaluated and discussed quantitatively and visu-
ally the ability of the proposed method to learn GANs
from a small amount of data and to generate levels
and their diversity for a tile-based video game. We
also optimized latent variables using CMA-ES for the
model obtained by the proposed method, and verified
the degree to which it is able to generate levels in ac-
cordance with the objectives.
4.1 Experimental Settings
4.1.1 The Zelda Environment from GVGAI
Framework
In this study, the Zelda environment of the GVGAI
Framework was used as the environment for level
generation. In this environment, the player moves on
a grid-like level with a height of 12 and a width of 16,
and completes the game by obtaining keys and reach-
ing the goal square. Enemies may be present on the
level and must be defeated by avoiding or attacking
them. The level consists of a total of eight types of
squares, including wall squares, floor squares, enemy
squares etc.. The following constraints must be satis-
fied for a level to be playable.
Figure 3: Original levels used for training GAN.
• There is only one player, one key, and one goal
tile.
• The key and goal tiles are reachable from the
player tile.
• The level is surrounded by wall tiles.
Five manually created levels which shown as Figure
3 were used as the training data for the GAN.
4.1.2 Model Architecture
The levels are represented as a 3D tensor of size
(8,12,16) and total of 8 different tiles allocated in
the channel direction. When converting the genera-
tor output tensor to a level, the tile corresponding to
the channel with the highest value is selected for each
position. In generator and discriminator, three con-
volution layer and two self-attention layer, which has
been shown to be effective in previous works (Chen
and Lyu, 2022; Rodriguez Torrado et al., 2020), were
used. The detailed model structure is shown in Table
4 and Table 5 in the appendix.
4.1.3 Experimental Parameters
The settings for each parameter during GAN train-
ing are shown in Table 6 in the appendix. Note that
the bootstrap method is implemented by starting the
training with an initial dataset of 5 × 7 = 35 since the
minibatch size is 32 and adding data satisfying the
constraints to the dataset every 10 epochs. In Method
1 and 2, only levels with a hamming distance of less
than 90% to each level in the training set were added.
In Method 2, the data was augmented with augmen-
tation models until 1000 levels were generated. The
weights of the model were initialized every time 50
levels were generated, and the dataset was initialized
every time 100 levels were generated.
4.2 Evaluation of Playability and
Diversity
4.2.1 Evaluation Metrics
In order to quantitatively evaluate the levels generated
by the learned model, the following metrics are used.
Playability. Whether the generated levels satisfy the
constraints, i.e., whether they are playable. In
implementation, heuristics were used to check
whether all constraints were satisfied.
Diverse Level Generation for Tile-Based Video Game using Generative Adversarial Networks from Few Samples
329

Average Hamming Distance(AHD). Average ham-
ming distance for all pairs of generated levels.
Duplication Rate(DR). Percentage of generated lev-
els that are not unique.
Special Tile Matches(STM). For all pairs of gener-
ated levels, the percentage of pairs for which the
position of the only existing tile in Zelda, such as
key, door, or player, matches.
Playability evaluation is necessary because the
level generation model should generate playable lev-
els. In addition, several indices were used to quan-
titatively measure the diversity of the generated lev-
els. We considered that the greater the percentage of
unique levels a generator can generate and the greater
the hamming distance between generated levels, the
more diverse the levels it can generate, so we used in-
dices such as duplication rate and average hamming
distance for quantitative evaluation. Furthermore, in
Zelda, there are only one each of the squares for the
key, goal, and player, and we considered these objects
to be important in the game. To evaluate whether we
were able to create different levels as a game experi-
ence, we used the percentage of agreement in the po-
sitions of these objects as an evaluation index. Playa-
bility and duplication rate was calculated from 10000
levels, while average hamming distance and special
tile matches were calculated from 1000 levels.
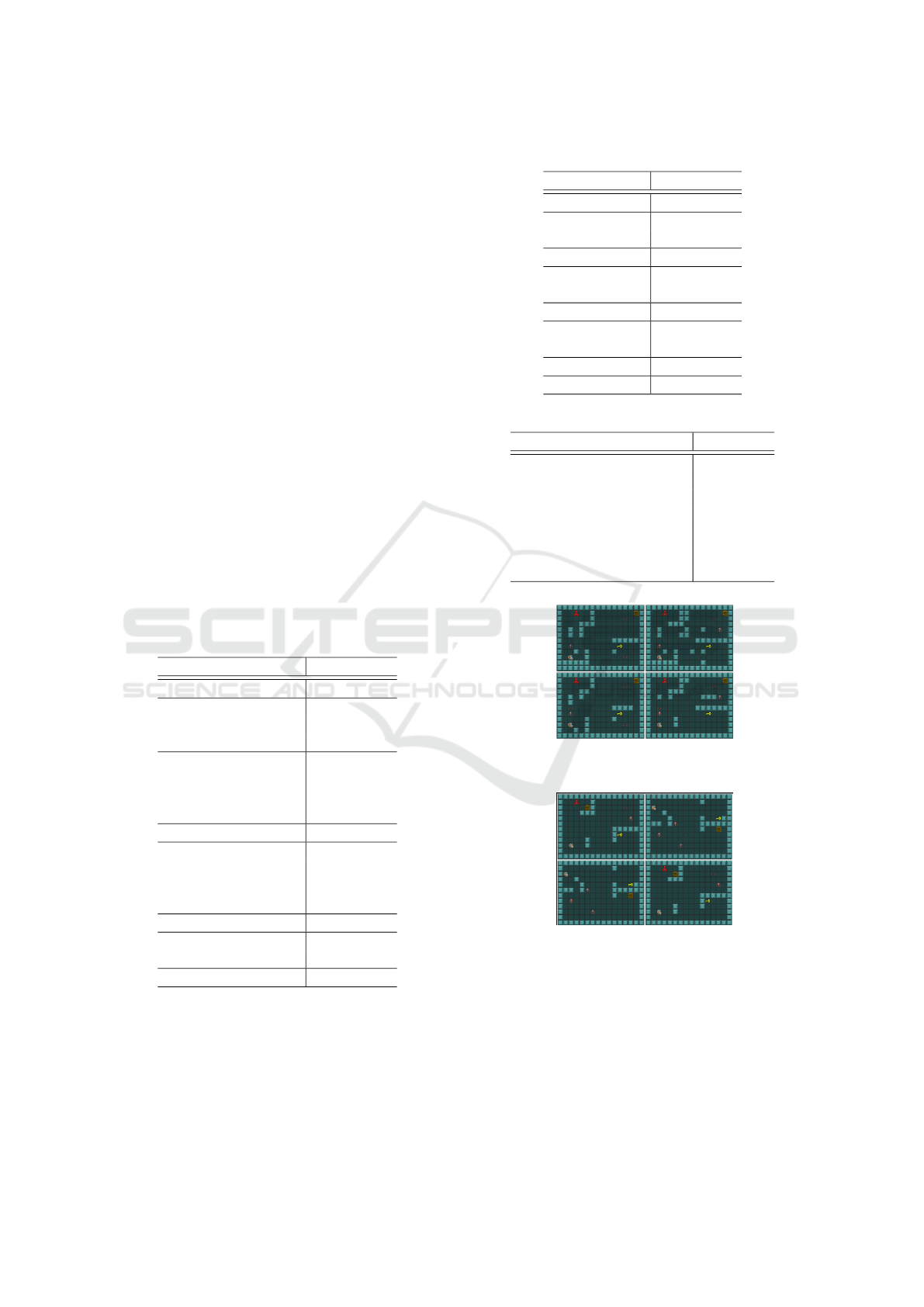
4.2.2 Results and Discussion
The results of the evaluation for each of the learned
models are shown in Table 1 and 2. Examples of
the levels generated by each method are shown in
Figures 4,5,8 and 9. As a comparison method, we
use the conventional method using only bootstrap in
(Rodriguez Torrado et al., 2020) and the GAN train-
ing method without data augmentation and diversity
Loss.
Comparing the proposed and conventional meth-
ods, the proposed methods outperform the conven-
tional bootstrap method and the simple GAN method
in terms of diversity indices such as average hamming
distance, duplication rate, Special tile matches, and
variance of each tile number, indicating that the pro-
posed method is able to generate various levels. In
the conventional bootstrap method, the model used in
this experiment generated only levels that were close
to specific levels in the early stages of training, so the
dataset was biased as bootstrap continued to add only
similar levels as training data, resulting in small dif-
ferences between levels and a high duplication rate.
A simple GAN could only generate levels that were
nearly identical to the training dataset.
Comparing the proposed data augmentation meth-
ods, Method 1 and Method 2, the hamming distance
between the generated data increased for Method 1,
while the average number of tiles in the generated lev-
els was significantly different from the original data.
This may be due to the fact that the distribution of
the level in the dataset gradually became more bi-
ased as generated levels was added to the dataset. In
Method 2, the bias of the tile distribution and the value
of special tile matches are smaller because the data
was augmented so that level bias within the dataset
is less likely to occur. On the other hand, playability
is reduced. Most of the cases where a level cannot
be generated correctly are those where the constraints
on the number of keys, doors, and player tiles are not
satisfied. The baseline method and the simple GAN
method, where the position of these tiles is almost de-
terministic, show high playability, while the proposed
method, where the positions of these tiles are diversi-
fied, shows low playability. As for the low playability,
it could be improved by devising a model structure
like CESAGAN, but since it is possible to generate a
large number of levels in parallel, playable levels can
be selected from among the many levels generated. It
is also possible to generate playable levels with suf-
ficient probability by searching for latent variables as
described in the next subsection.
4.3 The Effectiveness of Evolutionary
Latent Space Search
Since the proposed method has acquired a genera-
tor capable of various outputs, it can effectively uti-
lize the method of generating levels following the ob-
jective by searching latent variables. In a previous
work (Volz et al., 2018), it was shown that level gen-
eration reflecting the creator’s objective is possible
by optimizing the input latent variables according to
the objective function using CMA-ES. CMA-ES is a
black-box optimization algorithm based on evolution-
ary computation and performs continuous optimiza-
tion by evolutionary computation using a multi-point
search with a Gaussian distribution. By optimizing
the latent vectors of the generator’s inputs with CMA-
ES, latent variables that generate levels in line with
the objective function can be discovered.
In this part, we optimize latent variables for the
following two objective functions F
1
and F
2
to exam-
ine the extent to which latent variables reflecting the
objective functions can be generated. Note that P is
a variable that takes 1 if the level is playable and 0
otherwise.
ICAART 2023 - 15th International Conference on Agents and Artificial Intelligence
330

Table 1: Playability and diversity statistics of each method. These values are averages of 5 runs.
Playability(%)↑ AHD↑ DR(%)↓ STM(%)↓
Ours (Method 1) 80.1 44.6 0.0 50.5
Ours (Method 2) 23.8 37.2 0.0 18.4
Conventional Bootstrap 87.6 13.3 10.7 53.2
Simple GAN 84.2 14.1 97.8 65.2
Original Levels 100.0 34.8 0.0 0.0
Table 2: Average and standard deviation of the number of tiles in each level. These values are averages of 5 runs.
Wall Floor Enemy
avg. std. avg. std. avg. std.
Ours (Method 1) 89.2 10.1 94.7 10.1 5.1 1.9
Ours (Method 2) 76.5 6.5 108.1 6.7 4.4 2.3
Conventional Bootstrap 68.0 3.9 117.3 3.6 3.7 1.3
Simple GAN 66.7 3.0 119.1 2.9 3.3 0.4
Original Levels 71.4 8.2 114.4 8.1 3.2 0.39
F
1
= 100P − #walls − 5 × #enemies (5)
F
2
= 100P + #walls + 5 × #enemies (6)
F
1
was designed to maximize the number of walls
and enemies while achieving a playable level, and F
2
was designed to minimize the number of walls and
enemies while achieving a playable level.
For the implementation, we used pycma
1
, a CMA-
ES library in python, and initialized the number of
initial population to 14 and the standard deviation to
0.5 for the optimization of 150 iterations. Examples
of the results of optimization using the objective func-
tion of F
1
, F
2
with z sampled from the Gaussian dis-
tribution as the initial value for the model obtained by
the proposed method using data augmentation method
2 are shown in Figure 6,7.
In both cases of optimization with F
1
and F
2
, the
number of enemies and wall tiles can be varied as de-
sired, indicating that the level can be generated in ac-
cordance with the objective to some extent. By com-
paring the playability of the proposed method and
the conventional method after optimizing each from
50 different initial values and their average objec-
tive function values, we verified whether the proposed
method is able to generate playable levels and how
well the proposed method is able to edit them to meet
the objectives compared to the conventional method.
From Table 3, both the proposed and conventional
methods are able to obtain playable levels by optimiz-
ing latent variables. Comparing the average hamming
distances of the generated levels, it can be seen that
the model with the proposed method is able to gener-
ate more levels with various variations. In addition,
comparing the objective function values, the model
1
https://github.com/CMA-ES/pycma
by the proposed method is as good at generating lev-
els with few enemies and walls and outperforms the
model using the existing method in generating lev-
els with many enemies and walls. From this result, it
can be said that the proposed method is more capable
of generating levels that meet the objective due to its
more diverse outputs.
5 CONCLUSION
In this study, we confirmed that various levels can be
generated by GAN in the Zelda environment of the
GVGAI Framework by expanding training data using
generated data and regularizing during model train-
ing. We have found that we can generate numeri-
cally more diverse levels than GANs using conven-
tional bootstrapping methods. Although playability
is reduced, the latent variables can be optimized by
CMA-ES to generate playable levels in seconds. Not
only that, but the diversity of levels generated by the
proposed method has increased, making it possible to
generate levels that better reflect the intent of the ob-
jective function.
Although the proposed method was able to gen-
erate a variety of levels for Zelda, a relatively small
game with less complex constraints, it is possible to
generate a variety of levels for a game of this size by
randomly placing walls and enemy tiles without using
a GAN. Since the proposed method can be applied to
other tile-based games, we will conduct experiments
on games with larger or more complex levels to verify
their effectiveness.
Diverse Level Generation for Tile-Based Video Game using Generative Adversarial Networks from Few Samples
331
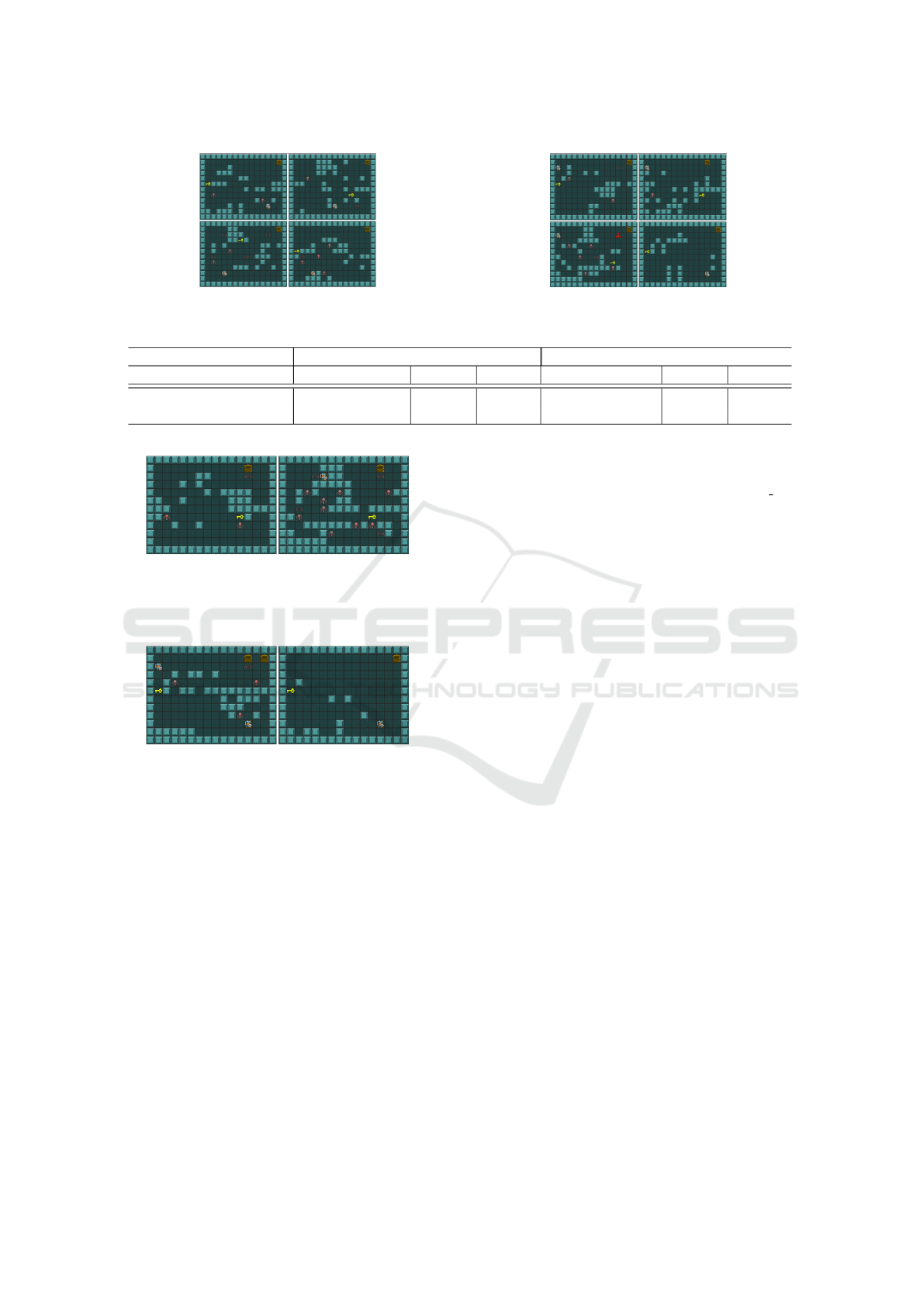
Figure 4: Examples of generated levels by proposed method 1. Figure 5: Examples of generated levels by proposed method 2.
Table 3: Playability and average values of objective function for levels generated from latent variables optimized by CMA-ES.
F
1
F
2
Playability(%)↑ Value ↓ AHD ↑ Playability (%)↑ Value ↓ AHD ↑
Ours (Method 2) 100.0 -144.2 40.8 100.0 59.6 14.6
Conventional Bootstrap 100.0 -119.2 15.8 100.0 59.8 4.4
Figure 6: Results of optimization with F
1
for the model
trained by the proposed method (Method 2). Levels on the
left are generated from the initial values, and levels on the
right are generated from the optimal values.
Figure 7: Results of optimization with F
2
for the model
trained by the proposed method (Method 2). Levels on the
left are generated from the initial values, and levels on the
right are generated from the optimal values.
ACKNOWLEDGEMENT
This work was supported by JSPS KAKENHI Grant
Numbers JP21H03496, JP22K12157.
REFERENCES
Awiszus, M., Schubert, F., and Rosenhahn, B. (2020). Toad-
gan: Coherent style level generation from a single ex-
ample.
Bontrager, P. and Togelius, J. (2021). Learning to Generate
Levels From Nothing. arXiv:2002.05259 [cs]. arXiv:
2002.05259.
Chen, Z. and Lyu, D. (2022). Procedural genera-
tion of virtual pavilions via a deep convolutional
generative adversarial network. Computer Anima-
tion and Virtual Worlds, 33(3-4):e2063. eprint:
https://onlinelibrary.wiley.com/doi/pdf/10.1002/cav.2
063.
Gissl
´
en, L., Eakins, A., Gordillo, C., Bergdahl, J.,
and Tollmar, K. (2021). Adversarial reinforcement
learning for procedural content generation. CoRR,
abs/2103.04847.
Goodfellow, I. J., Pouget-Abadie, J., Mirza, M., Xu, B.,
Warde-Farley, D., Ozair, S., Courville, A., and Ben-
gio, Y. (2014). Generative adversarial networks.
Hald, A., Hansen, J. S., Kristensen, J. T., and Burelli,
P. (2020). Procedural content generation of puzzle
games using conditional generative adversarial net-
works. International Conference on the Foundations
of Digital Games.
Hansen, N., M
¨
uller, S., and Koumoutsakos, P. (2003).
Reducing the time complexity of the derandomized
evolution strategy with covariance matrix adaptation
(cma-es). Evolutionary computation, 11:1–18.
Justesen, N., Torrado, R. R., Bontrager, P., Khalifa, A., To-
gelius, J., and Risi, S. (2018). Procedural level genera-
tion improves generality of deep reinforcement learn-
ing. CoRR, abs/1806.10729.
Khalifa, A., Bontrager, P., Earle, S., and Togelius, J. (2020).
PCGRL: Procedural Content Generation via Rein-
forcement Learning. arXiv:2001.09212 [cs, stat].
arXiv: 2001.09212.
Kumaran, V., Mott, B. W., and Lester, J. C. (2020). Gen-
erating game levels for multiple distinct games with a
common latent space. In AIIDE.
Lim, J. H. and Ye, J. C. (2017). Geometric gan.
Liu, J., Snodgrass, S., Khalifa, A., Risi, S., Yannakakis,
G. N., and Togelius, J. (2020). Deep learning for pro-
cedural content generation. CoRR, abs/2010.04548.
Nelson, N. S. T. J. (2016). Procedural Content Generation
in Games. SpringerLink.
Park, K., Mott, B., Min, W., Boyer, K., Wiebe, E., and
Lester, J. (2019). Generating educational game lev-
ICAART 2023 - 15th International Conference on Agents and Artificial Intelligence
332
els with multistep deep convolutional generative ad-
versarial networks. pages 1–8.
Perez-Liebana, D., Liu, J., Khalifa, A., Gaina, R. D., To-
gelius, J., and Lucas, S. M. (2018). General video
game ai: a multi-track framework for evaluating
agents, games and content generation algorithms.
Radford, A., Metz, L., and Chintala, S. (2015). Unsuper-
vised representation learning with deep convolutional
generative adversarial networks.
Rodriguez Torrado, R., Khalifa, A., Cerny Green, M., Juste-
sen, N., Risi, S., and Togelius, J. (2020). Bootstrap-
ping conditional gans for video game level generation.
In 2020 IEEE Conference on Games (CoG), pages 41–
48.
Steckel, K. and Schrum, J. (2021). Illuminating the space of
beatable lode runner levels produced by various gen-
erative adversarial networks. CoRR, abs/2101.07868.
Volz, V., Schrum, J., Liu, J., Lucas, S. M., Smith, A. M., and
Risi, S. (2018). Evolving mario levels in the latent
space of a deep convolutional generative adversarial
network. CoRR, abs/1805.00728.
Zhang, H., Goodfellow, I., Metaxas, D., and Odena, A.
(2018). Self-attention generative adversarial net-
works.
APPENDIX
Table 4: Model structure of generator.
Layer Shape
Input (32,)
Deconvolution (512,3,4)
Batch Normalization (512,3,4)
ReLU (512,3,4)
Upsample (512,6,8)
Convolution (256,6,8)
Batch Normalization (256,6,8)
ReLU (256,6,8)
Self-Attention (256,6,8)
Upsample (256,12,16)
Convolution (128,12,16)
Batch Normalization (128,12,16)
ReLU (128,12,16)
Self-Attention (128,12,16)
Convolution (8,12,16)
Softmax (8,12,16)
Output (8,12,16)
Table 5: Model structure of discriminator.
Layer Shape
Input (8,12,16)
Convolution (128,12,16)
Leaky ReLU (128,12,16)
Self-Attention (128,12,16)
Convolution (256,6,8)
Leaky ReLU (256,6,8)
Self-Attention (256,6,8)
Convolution (512,3,4)
Leaky ReLU (512,3,4)
Convolution (1,)
Output (1,)
Table 6: Experimental parameters.
values
Latent size 32
Minibatch size 32
Optimization RMSProp
Learning rate (G) 5.0 × 10
−5
Learning rate (D) 5.0 × 10
−5
λ
div
50.0
Training iterations 10000
Figure 8: Examples of generated levels by a conventional
bootstrap GAN method.
Figure 9: Examples of generated levels by a simple GAN
method.
Diverse Level Generation for Tile-Based Video Game using Generative Adversarial Networks from Few Samples
333
