
Maritime Surveillance by Multiple Data Fusion: An Application Based
on Deep Learning Object Detection, AIS Data and Geofencing
Sergio Ballines-Barrera
1 a
, Leopoldo L
´
opez
1 b
, Daniel Santana-Cedr
´
es
2 c
and Nelson Monz
´
on
1,2 d
1
Qualitas Artificial Intelligence and Science, Spain
2
CTIM, Instituto Universitario de Cibern
´
etica, Empresas y Sociedad, University of Las Palmas de Gran Canaria, Spain
www.qaisc.com
Keywords:
Object Detection, AIS, PTZ cameras, Deep Learning, Geofencing, Maritime Environment.
Abstract:
Marine traffic represents one of the critical points in coastal monitoring. This task has been eased by the
development of Automatic Identification Systems (AIS), which allow ship recognition. However, AIS tech-
nology is not mandatory for all vessels, so there is a need for using alternative techniques to identify and track
them. In this paper, we present the integration of several technologies. First, we perform ship detection by
using different camera-based approaches, depending on the moment of the day (daytime or nighttime). From
this detection, we estimate the vessel’s georeferenced position. Secondly, this estimation is combined with the
information provided by AIS devices. We obtain a correspondence between the scene and the AIS data and we
also detect ships without VHF transmitters. Together with a geofencing technique, we introduce a solution that
fuses data from different sources, providing useful information for decision-making regarding the presence of
vessels in near-shore locations.
1 INTRODUCTION
Seaborne trade encompasses about 90 % of world
trading (Kaluza et al., 2010). Despite the outbreak of
the pandemic, it was affected just by a 3.8 % during
2020, with a recovery of 4.3 % in 2021 (Sirimanne
et al., 2021). Hence, coastal regions, in particular
those with port facilities, are clearly affected by a
large influx of boats throughout the year. As an exam-
ple, in 2021 the Port of Shanghai alone handled a vol-
ume of about 47 million TEU (Twenty-foot Equivalent
Unit) in containers
1
. Furthermore, if we consider the
transit of other sorts of vessels (refueling, repairing,
sports, or leisure), their number rises rapidly. In this
regard, the importance of an accurate harbor traffic
monitoring is quite relevant.
Automatic Identification Systems (AIS) provides
the vessel position surrounding harbors and port au-
thorities, although their use is not mandatory for
all maritime vehicles. Consequently, the monitoring
a
https://orcid.org/0000-0002-3327-5137
b
https://orcid.org/0000-0002-7066-4393
c
https://orcid.org/0000-0003-2032-5649
d
https://orcid.org/0000-0003-0571-9068
1
Top 20 container ports
tasks become arduous, complicating the surveillance
of nearby waters. In this sense, we highlight the im-
portance of using additional technologies, intending
to complement and fill in the weaknesses of the cur-
rent vessel monitoring systems.
The location of objects captured by cameras has
been tackled through different Computer Vision tech-
niques. From background subtraction techniques (Ar-
shad et al., 2010; Hu et al., 2011) to optical flow algo-
rithms (Li and Man, 2016; Larson et al., 2022), these
approaches have been widely used in different envi-
ronments, including coastal scenes. Object recogni-
tion in seaside scenes has been improved by several
proposals (Zhang et al., 2021; Wang et al., 2022), al-
beit it remains considered an unsolved problem. Even
with advances in Neural Networks, the most promis-
ing computational trend of Computer Vision in recent
years, there are still limits to challenges that have not
been overcome yet.
In this work, we integrate the accuracy of AIS to-
gether with the versatility of Neural Networks, sup-
plied with images from a PTZ (Pan-Tilt-Zoom) cam-
era. The main objective is to attain a broader aware-
ness of the port environment, improving security
in nearby waters. Some approaches (Bloisi et al.,
2012; Simonsen et al., 2020) have proposed similar
846
Ballines-Barrera, S., López, L., Santana-Cedrés, D. and Monzón, N.
Maritime Surveillance by Multiple Data Fusion: An Application Based on Deep Learning Object Detection, AIS Data and Geofencing.
DOI: 10.5220/0011670100003417
In Proceedings of the 18th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2023) - Volume 4: VISAPP, pages
846-855
ISBN: 978-989-758-634-7; ISSN: 2184-4321
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)

schemes but we use a more recent CNN’s architec-
ture (Bochkovskiy et al., 2020). Besides, our night
approach is simple but also cheaper due to the fact
that we only use an optical camera and no thermal in-
formation which cost is not negligible. In (Fu et al.,
2021a; Fu et al., 2021b) were proposed an architec-
ture based on YOLOv4 fused with a convolutional at-
tention module. As said, our approach also detects
vessels in optical nocturnal scenes. Also, our solu-
tion provides the vessels’ location in georeferenced
perimeters nearby the ports.
Additionally, in coastal regions that may suffer
from poor connectivity, it is necessary that our AI
strategies work efficiently on remote systems (Satya-
narayanan, 2017; Zhao et al., 2019). Hence, our de-
velopments are carried out under the premise that they
must be embedded in edge computing systems.
This research work is the first step in the strategy
to achieve the future QAISC AI Coastal Surveillance
Solution that is currently developed and validated in
two complementary work environments:
• The Port of Las Palmas de Gran Canaria
2
where
the ICTS PLOCAN
3
has set up a sea observation
station using HF radar technology and an optical
camera. This environment is helping us to develop
and validate approaches against very low visibil-
ity due to calima and haze situations representa-
tive of the South Atlantic and the coast of Africa
and the Middle East.
• The Port of Gij
´
on
4
, where a sea observation sta-
tion with an optical camera has been recently in-
stalled and where the environment provides situ-
ations of very low visibility due to rain, fog and
other complex weather conditions representative
of the North Atlantic.
The rest of this paper is organized as follows:
in section 2 we present the related works regarding
the use of AIS systems and cameras to identify ves-
sels. Afterward, section 3 includes the presented tech-
niques. Then, section 4 outlines the experimental
setup and results of ship detection, including the ap-
plication of geo-fencing. Finally, the conclusions are
summarized in section 5.
2 RELATED WORKS
Object detection in the marine environment has been
classified by many experts as a difficult problem to
overcome (Moosbauer et al., 2019; Prasad et al.,
2
http://www.palmasport.es/en/
3
https://www.plocan.eu/
4
https://www.puertogijon.es/en/
2020). Factors such as weather conditions, waves or
the magnitude of distances, appear as typical obsta-
cles in this type of domain and interfere with the pre-
dictions made by the detectors. Furthermore, the ab-
sence of labeled datasets complicates the use of Neu-
ral Networks as an element to apply inference, which
requires an additional effort to improve the quality of
the results.
Depending on the perspective of the images used,
this topic is classified into two broad categories: boat
detection from an aerial or satellite view and ship de-
tection from a height near the surface. As an exam-
ple of some of the work done for the first of these
groups, the work of (Chen et al., 2009) proposed the
use of polarization cross-entropy in a variant of the
CFAR (Constant False Alarm Rate) algorithm, while
other researchers have experimented with different
approaches using Deep Learning as a common fac-
tor (Kang et al., 2017; Yang et al., 2018). The latter
aspect has also been one of the most popular methods
to perform detection in scenes taken from a ground
viewpoint, although other scientists have presented
alternative techniques, such as the work (Frost and
Tapamo, 2013) in which was proposed the use of pre-
defined silhouettes with priority levels throughout the
image.
In addition to these strategies, the maritime field
has an element that provides highly useful data: AIS
devices (Harre, 2000). This technology receives in-
formation about the geographical position of vessels,
their course and speed, their dimensions, etc. How-
ever, this element presents several limitations, such as
the periodicity of the reports issued by the vehicle it-
self, which can generate a disparity between the last
situation reflected by the AIS and reality (Tu et al.,
2018). Furthermore, the IMO (International Mar-
itime Organization) indicates that the use of AIS is not
mandatory for all vessels, introducing incongruities
between the real position and the data provided by the
AIS
5
.
For this reason, previous studies have already
used Neural Networks (Wang et al., 2019; Chen
et al., 2020) and AIS instruments together. Nonethe-
less, most of its use has been aimed at predicting
the trajectory of ships using a succession of geo-
graphic locations emitted by these transmitters (Xi-
aorui and Changchuan, 2011; Last et al., 2014). Con-
sequently, to try to contribute to this field, in this work
we present a prototype that unifies Neural Networks
Computer Vision Techniques, information from AIS
devices, and geofencing aiming to improve maritime
security and safety.
5
AIS transponders regulation
Maritime Surveillance by Multiple Data Fusion: An Application Based on Deep Learning Object Detection, AIS Data and Geofencing
847

3 METHODOLOGY
Outdoor object detection is affected by environmen-
tal conditions, as in the case of maritime areas. Thus,
finding reliable tools to overcome a real-world sce-
nario is challenging. In this sense, Neural Networks
become useful to face a real context, although feature
extraction is affected by, for instance, low-light con-
ditions (i.e. night scenes). Due to this fact, in this
work, we propose two different approaches in order
to detect vessels, based on such lighting conditions, to
then compute the correspondence between such ves-
sels and AIS information.
First, to cope with images during the day, a
YOLOv4 Neural Network architecture (Bochkovskiy
et al., 2020) has been used. Among its advantages,
this network has a fast loading and inference speed,
low computational cost, and high quality of predic-
tions, as presented in (Ballines Barrera, 2020b). On
the other hand, detection under nighttime conditions
relies on analyzing the distribution of the standard de-
viation inside an image, subdivided into a grid. Both
approaches fit in our remote system.
In this section, we include the description of the
hardware used, the dataset, and the details of both
techniques, as well as the geofencing approach to in-
troduce context information.
3.1 Hardware
Regarding the camera system used to capture mar-
itime scenes, we use Hikvision PTZ cameras models
DS-2DF8836I5X
6
and DS-2DF9C435IHS-DLWT2
7
installed in the Ports of Las Palmas de Gran Canaria
and Gij
´
on, respectively. These models are able to ob-
tain images with a resolution of 4K and has a zoom of
up to 36x so that distant objects can be recorded with
high quality. We observe the cameras and their sur-
rounding environment in the pictures 1(a) and 1(b).
(a) Port of Las Palmas de G.C. (b) Port of Gij
´
on
Figure 1: Cameras installed in the context of this work.
6
DS-2DF8836I5X specifications
7
DS-2DF9C435IHS-DLWT2 specifications
Related to the processing hardware, we use an
NVIDIA RTX 3090 to train the model. Our edge de-
vice is an NVIDIA Xavier NX 8GB with JetPack 4.5
installed (find more details at this link).
The vessels’ detection also uses information from
a dual-channel AIS receiver. This system uses an
NMEA 0183 VDM protocol and includes USB 2.0
outputs delivering the data transmitted by AIS Class
A and Class B transponder devices, AIS SARTs, and
Aids to navigation.
3.2 Dataset
With the idea of improving the network’s ability to
detect ships, we have created a new dataset for train-
ing and validation. To this aim, the PTZ camera de-
scribed above was used to obtain captures from mul-
tiple views and with different zoom levels. Never-
theless, due to the fact that many of the images did
not contain vessels, a previous object detection was
applied with a twofold purpose. On the one hand,
this process allows for differentiating images with and
without vessels. On the other hand, preliminary label-
ing is obtained. Afterward, this last set was revised
to filter the false negatives that would happen during
such first detection.
The obtained dataset consists of 3,000 samples,
which were labeled in YOLO format. Moreover,
to increase its quality, a data augmentation process
was performed by using image transformation effects
such as color or geometry alterations, or noise addi-
tion (among others). In this way, the model can be
strengthened by including scenarios with fog, rain,
and other adverse weather conditions. Finally, parts
of the SeaShips (Shao et al., 2018) and Microsoft
COCO (Lin et al., 2014) datasets were used to incor-
porate a wider diversity of perspectives and vessels,
increasing the total amount of images up to 10,000.
More details can be seen in (Ballines Barrera, 2020a).
3.3 Vessels Detection
As introduced above, vessel detection is a tough task,
due to complex environment and lighting conditions.
In this way, we propose two different approaches de-
pending on the moment of the day, i.e. daytime and
nighttime.
3.3.1 Daytime
Based on pre-trained weights from YOLOv4 network
under COCO dataset, we perform transfer learning
using the dataset described in section 3.2. For this
purpose, this set was divided into training (80 %) and
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
848

testing (20 %). To evaluate the network performance,
we consider the mean Averaged Precision (mAP). Ini-
tially, the model provided a score of 55.7 % mAP,
but after transfer learning, it reached a 85.3 % mAP
(20,000 epochs and using the standard network con-
figuration). We rely on this last model to detect the
vessels in the scene during the daytime.
3.3.2 Nighttime
Instead of using the inferences provided by the re-
trained YOLOv4 network, we propose an alternative
method to obtain the location of boats in nighttime
images. This technique is based on the assumption
that, on the presence of light sources on a maritime
image during the night, such sources correspond to
vessels. However, night scenes suffer from noise and
artifacts, which should be minimized in order to pro-
vide better detection. In this sense, an automatic sys-
tem was developed to adjust the camera’s image pa-
rameters, aiming to reduce flashing lights at nightfall
and reduce noise. Moreover, at dawn, it restores the
daytime settings of the camera to analyze images us-
ing the method proposed in the above section.
The proposed technique works in the following
way: firstly, the input image is converted to grayscale
(Figure 2(a)). The points closer to a light source have
higher levels of intensity, so thresholding is applied
in order to obtain the whiter points. We have ex-
perimentally set a threshold value of 80. In practice,
this value is enough to filter artifacts while preserving
light sources. In Figure 2, we include the results for
different threshold values (Figures 2(b)–2(d)). As ob-
served, the higher the threshold, the lower the lights
preserved, and vice versa. Afterward, using such a
threshold, the image is converted to black and white.
(a) Grayscale image (b) M
T =60
(c) M
T =80
(d) M
T =100
Figure 2: Effect of the threshold value on the BW mask:
(a) input image converted to grayscale and the results for
different thresholds to obtain the corresponding mask (M
T
)
((b) 60,(c) 80, and (d) 100).
Once the input image is filtered, it is divided into
a 20 × 20 grid. The idea is to compute the standard
deviation (σ) in each resulting cell, in order to de-
tect those regions with white pixels. We have experi-
mentally observed that using σ > 20 is enough to de-
tect regions belonging to ship lights, avoiding false
positives, and providing enough cells to build up a
bounding box that contains the ship. Finally, from
the selected cells, a new bounding box is generated,
by annexing the contiguous regions. In this way, an
approximation of detection boxes similar to the ones
provided by the YOLOv4 network is obtained.
(a) Grayscale image (b) BW mask
(c) σ > 10 (d) σ > 10 bounding box
(e) σ > 20 (f) σ > 20 bounding box
(g) σ > 30 (h) σ > 30 bounding box
Figure 3: Effect of the threshold for σ on the bounding
box result: (a) original image, (b) associated mask, and the
results for different sigma thresholds and their associated
bounding box (σ > 10 – (c)(d), σ > 20 – (e)(f), and σ > 30
– (g)(h)).
In order to illustrate the influence of different
thresholds for σ we include Figure 3, which contains
the original image in grayscale (Figure 3(a)), its as-
sociated mask (Figure 3(b)), and the effect of various
threshold values. As observed, for lower values, the
obtained region is bigger, and its associated bounding
box includes water at the bottom. On the other hand,
for greater threshold values, the resulting bounding
box leaves out part of the ship stern. Hence, it seems
suitable to use an intermediate value for the threshold.
Maritime Surveillance by Multiple Data Fusion: An Application Based on Deep Learning Object Detection, AIS Data and Geofencing
849

3.4 Estimation of the Georeferenced
Position
Independently of the approach used to detect the ves-
sels in the scene, we can estimate their georeferenced
position. This can be done by using the Python library
CameraTransform (Gerum et al., 2019), which in-
cludes utilities to perform a projection of points from
an image (2D) to a real-world scene (3D), given the
intrinsic and extrinsic camera parameters. As we are
not using panoramic sequences, a rectilinear projec-
tion (pin-hole camera) is used to estimate such a pro-
jection.
This way, it is possible to obtain the estimated lat-
itude and longitude of any pixel in the image. In par-
ticular, we are interested in obtaining such informa-
tion on the points belonging to bounding boxes from
YOLOv4 inferences. Owing to the fact that bound-
ing boxes are made up of more than a single pixel, if
we compute the geolocation of a ship based on such
pixels, we will obtain multiple distances. To avoid
this, we use the center point of the lower side of the
detection bounding box as a reference to estimate the
location of each ship.
On the other hand, it is possible to know the pre-
cise location of near ships by using the information
transmitted by AIS devices. As the source of such in-
formation is hosted in an external server, it is obtained
with a one-minute frequency. The received file consist
of pairs of NMEA-ZDA
8
and AIVDM
9
/ AIVDO
10
messages, thus managing to assign an instant of time
to all transferred sequences.
To speed up the data file reading, we record the
last processed position and use it as a reference for the
next access. Furthermore, to obtain the most relevant
data, we apply two types of filters to the sequence,
based on the date of transmission and the position of
the ship. For the latter, the Equations 1 and 2 were
used to obtain a specific region of the environment,
taking into account the direction and field of view of
the camera. Finally, only the most recent message
from each vessel is kept for the next steps in the pro-
cess.
ϕ
2
= arcsin
sin(ϕ
1
)cos
d
r
+ cos(ϕ
1
)sin
d
r
cosθ
,
(1)
λ
2
= λ
1
+arctan
sin(θ) sin
d
r
cos(ϕ
1
)
cos
d
r
− sin(ϕ
1
)sin (ϕ
2
)
!
, (2)
where d denotes the haversine distance between both
locations, r the sphere radius, ϕ and λ the latitude and
8
Time and date
9
Received data from other vessels
10
Own vessel’s information
longitude of each perspective point, and θ the bearing
(clockwise from North).
Finally, to determine the disparity between the
AIS information and the estimated position, both are
correlated. First, both data are ordered according to
their latitude and longitude, and then Equation 3 is
used to compute the haversine distance between all
possible combinations.
d = 2r arcsin
r
sin
2
ϕ
1
−ϕ
2
2
+ cos (ϕ
1
)cos(ϕ
2
)sin
2
λ
1
−λ
2
2
!
,
(3)
where r indicates the sphere radius, and ϕ and λ the
latitude and longitude of each perspective point, re-
spectively.
Thus, the real distance between the method esti-
mation and the AIS information is computed, bind-
ing those pairs with the lowest distance. As a con-
sequence, we obtain a correspondence between the
scene captured by the camera and the information
provided by AIS devices, by fusing both data.
3.5 Geofencing
Apart from estimating the georeferenced position of
the vessels in the scene, it is also interesting to ob-
tain information regarding context. Techniques like
geofencing make it possible, which is very useful in
decision-making tasks because it provides a relation-
ship between the ship’s position and its surrounding
region.
With geofencing, we project synthetic lines, re-
gions, or polygons delineated initially on another ref-
erence system. In particular, in our case, we are inter-
ested in performing a back-and-forth projection. On
the one hand, the map includes regions we want to
project on the captured scene. On the other hand,
the vessels’ detection provides as output the bound-
ing boxes, which will be included in the map to repre-
sent the location. As in section 3.4, we use the library
CameraTransform, that includes functionalities to ob-
tain pixel coordinates from GPS data and vice versa.
4 EXPERIMENTAL RESULTS
In order to test the performance of the proposed tech-
niques, we present different experiments. First, we in-
clude results regarding the estimation of vessels’ ge-
olocalization at daytime and nighttime. Afterward, an
analysis including geofencing is presented.
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
850
4.1 Georeferenced Position Estimation
To evaluate the precision of the georeferenced posi-
tion estimation, we measure the distance error by us-
ing equation 4:
E
d
=
|M
d
− AIS
d
|
C
d
· 100, (4)
where E
d
denotes distance error and M
d
, AIS
d
, and
C
d
are the distances given by our method, the AIS de-
vice, and the distance to the camera, respectively. In
this way, we show the percentage error between the
position provided by AIS and the distance obtained
by our proposal. For this aim, we have averaged the
results related to measures carried out within 2 days,
by computing them at different zoom levels and con-
sidering diverse target distances.
4.1.1 Daytime
As described in section 3.3.1, during daytime we use
the inferences given by the re-trained YOLOv4 net-
work to estimate the vessels’ location. In order to
quantitatively characterize the results, in Table 1 we
include figures regarding percentage error computed
using equation 4, depending on the distance of the tar-
get boats and the zoom level used.
Table 1: Daytime geolocation error based on target ship dis-
tance and camera zoom level.
Distance (m)
0–2,500 2,501–5,000 5,001–7,500 7,501–10,000
Zoom
0.1 3.38% 7.61% 12.51% 19.51%
0.2 7.09% 6.18% 7.82% 8.48%
0.3 9.17% 3.13% 8.39% 9.92%
0.4 12.16% 4.93% 1.26% 6.11%
0.5 12.73% 5.69% 2.90% 4.53%
As observed, in general, the zoom level is crucial
to increase method precision. Nevertheless, this is not
true for the closest distance, probably due to the lens
distortion in near objects when using a long focal dis-
tance. Moreover, it is necessary to consider that sev-
eral challenges are faced when we measure in a real
scenario. Firstly, the low height camera position rel-
ative to sea level could lead to wrong distance esti-
mation of distant objects due to the perspective. Sec-
ondly, wind introduces instability in the view plane.
Finally, we rely on the precision of the ships’ detec-
tion given by the network. Therefore, an imprecise
detection results in a wrong estimation of the loca-
tion.
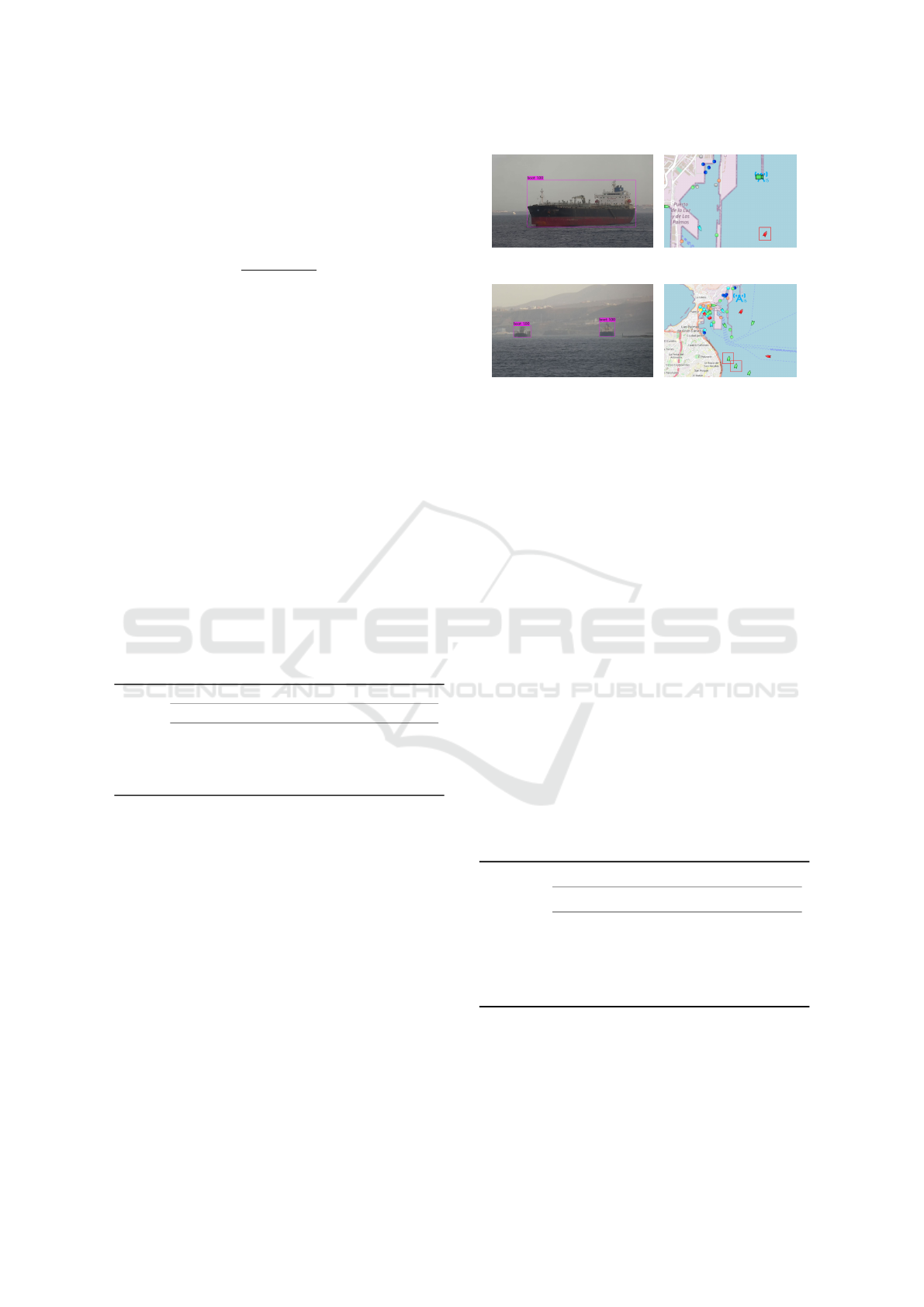
Qualitative results are given in Figure 4. Images
from 4(a) and 4(c) represent the estimation of the po-
sition given by our method, whereas 4(b) and 4(d) in-
clude the real location given by AIS devices. In the
(a) Estimation (b) Location
(c) Estimation (d) Location
Figure 4: Daytime detection results: at a close distance
((a), (b)) and at a medium distance ((c), (d)). We compare
the estimation ((a),(c)) with the real location ((b), (d) – red
squares mark vessels’ positions on the map).
case of a close distance (Figures 4(a) and 4(b)), the re-
sult given by our approach is 1,101 m whilst the AIS
system provides a distance of 1,233 m. On the other
hand, when a medium distance is considered (Figures
4(c) and 4(d)), the re-trained YOLOv4 model result
on 5,639 m (left) and 5,301 m (right), and the AIS
devices indicate 5,539 m and 5,180 m, respectively.
Considering these results, we can estimate a mean er-
ror of about 118 m.
4.1.2 Nighttime
Aiming to estimate the position of vessels during
nighttime, we apply the approach described in sec-
tion 3.3.2. Table 2 includes numbers regarding the
results of the detection, considering different zoom
levels with several target distances, as in the case of
daytime sequences.
Table 2: Nighttime geolocation error based on target ship
distance and camera zoom level.
Distance (m)
0–2,500 2,501–5,000 5,001–7,500
Zoom
0.1 26.96% 30.24% —
0.2 23.48% 21.15% —
0.3 23.25% 8.40% —
0.4 25.69% 6.89% 15.70%
0.5 24.97% 4.26% 18.63%
As can be observed, nighttime detection is less
precise than the daytime one. In this sense, it is nec-
essary to consider that night has several limitations,
mainly due to visibility constraints. Unlike the pre-
vious method, we have observed that the nighttime
scheme is not able to estimate ships between 7,501 m
Maritime Surveillance by Multiple Data Fusion: An Application Based on Deep Learning Object Detection, AIS Data and Geofencing
851

and 10,000 m, nor ships between 5,001 m and 7,500 m
with a low zoom level. Such limitations are mainly
due to the thresholds (black-and-white mask and σ)
and to the grid configuration. Related to the first one,
they can be modified but lead to detect false positives.
Regarding the lattice, shorter zooms provide a more
general view, which makes it tough to distinguish be-
tween ships at different distances.
Besides, since the lights of the ships are located at
a certain height rather than at the waterline, this influ-
ences the quality of the bounding box obtained. This
is observed mainly on nearby vessels, where the re-
sulting bounding box is placed higher than expected.
As a consequence, the estimated distance is farther
than the real one.
(a) Estimation (b) Location
(c) Estimation (d) Location
Figure 5: Nighttime detection results: at a close distance
((a), (b)) and at a medium distance ((c), (d)). We compare
the estimation ((a), (c)) with the real location ((b), (d) – red
squares mark vessels’ positions on the map).
Figure 5 depicts the results obtained during night-
time, comparing our method estimation (Figures 5(a)
and 5(c)) with the position given by the AIS (Fig-
ures 5(b) and 5(c)). For the case of a close distance
(Figures 5(a) and 5(b)), the proposed technique gives
a distance of 1,483 m, whereas the AIS system pro-
vides 1,633 m. On the other hand, when a medium
distance is considered, the nighttime approach results
in 3,292 m, whilst AIS device supplies a 3,058 m dis-
tance. This yields to an averaged error of about 192 m.
4.2 Geofencing
Once we have presented different results related to
vessels detection and location estimation, in this set
of experiments we include an analysis regarding ge-
ofencing.
Figure 6 includes the geofencing applied on an im-
age belonging to the Port of Las Palmas de Gran Ca-
naria. On the map (6(a)), the vessels are represented
with points, which are given by GPS coordinates ob-
tained from the projection resulting detection (repre-
sented with orange points and labeled with numbers
from 1 to 5) in 6(b). Alike, in the scene can be seen
the outcome of projecting the lines from the map to
the scene. Thus, we obtain mutual information, re-
garding the vessels and their position inside a defined
region.
A more complex example is presented in Figure
7, which includes a geofencing in the Port of Gij
´
on.
As represented in the map of Figure 7(a), an anchor-
ing area has been defined. Again, in this map, the
detected vessels are represented by orange points and
labeled with numbers. The corresponding geofenced
region in the scene can be observed in Figure 7(b),
where the ship labeled with 1 is almost on the limit
of the anchoring area, which also corresponds to the
scene viewed in the map.
In order to illustrate the robustness of the re-
trained YOLOv4 network, we include Figure 8. As
observed in Figure 8(a), we have a scene with multi-
ple vessels. In particular, it can be seen that a small
boat is in the forefront, whose detail is illustrated on
the right. One of the strengths of the presented tech-
nique is that is able to detect small boats, even those
which are not required to use AIS devices. Similarly
to previous figures, we also include the result of the
geofencing in the case of this small vessel. Although
in the scene in Figure 8(c) seems that the small boat
and the crane ship behind are close, this is a matter
of perspective. We can see in Figure 8(b), that the
boat labeled with 2 is inside Navigation Channel I,
whereas the crane ship marked with 4 is located in
between Navigation Channels I and II. This can be
also noticed in the geofencing depicted in Figure 8(c),
where the green line is behind the boat and the orange
one is on the starboard of the crane ship.
5 CONCLUSIONS
A solution that fuses data from different sources for
decision-making tasks on coastal regions has been
presented in this work. To this end, two approaches
to detect vessels are used, depending on the moment
of the day. From that outcome, the ships’ distances
are estimated and then paired with the information
provided by AIS devices. Together with a geofenc-
ing technique, mutual information is correlated. This
way, this application gives the vessels’ GPS position
on the map and projects virtual fences on the camera
scene, and includes boats with no AIS systems.
When comparing the used technique to estimate
vessels’ geographic location with the AIS informa-
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
852
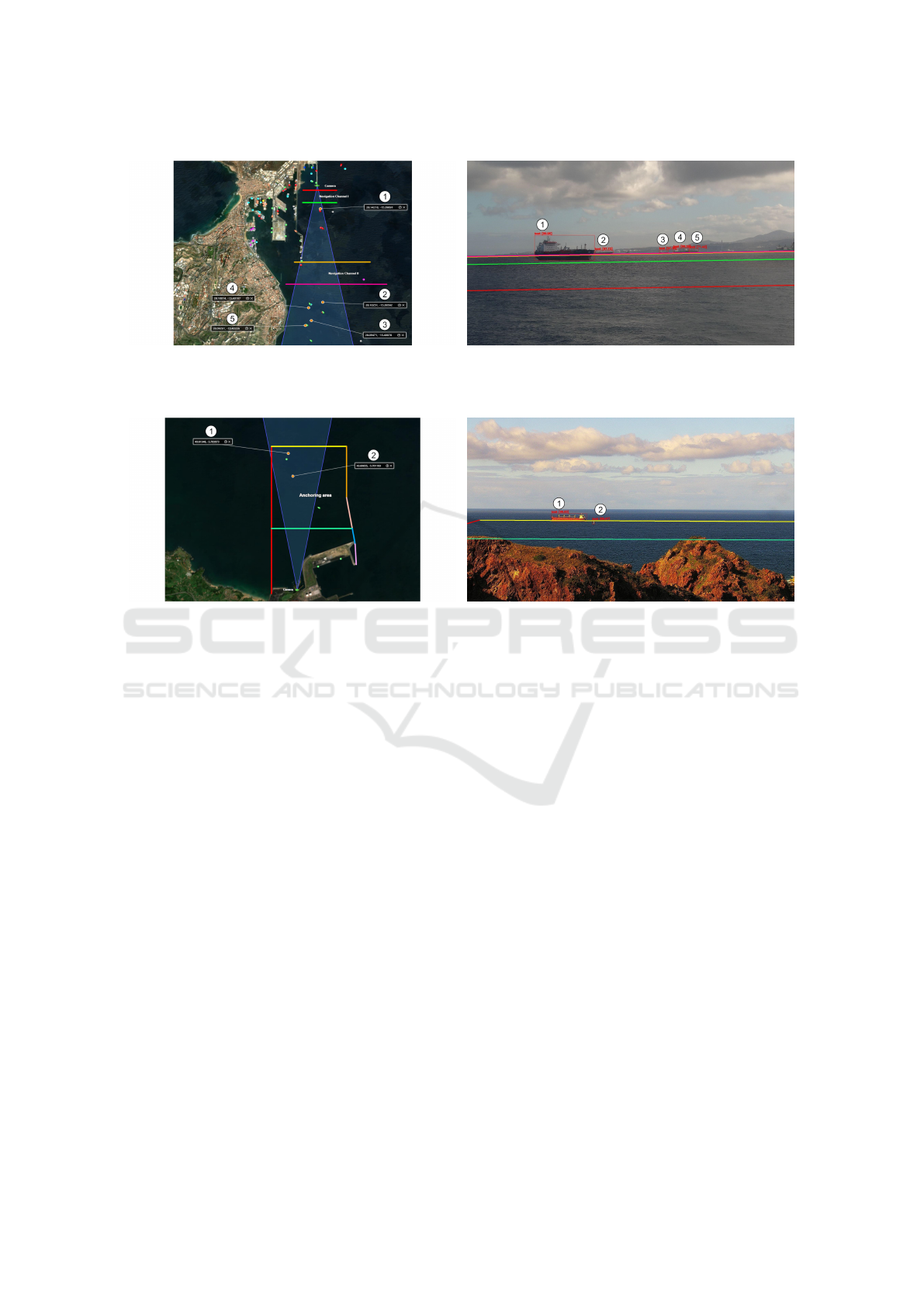
(a) Geofencing map (b) Geofencing scene
Figure 6: Geofencing in the Port of Las Palmas de Gran Canaria: (a) geofencing on the map and (b) geofencing on the scene.
(a) Geofencing map (b) Geofencing scene
Figure 7: Geofencing in the Port of Gij
´
on: (a) geofencing on the map and (b) geofencing on the scene.
tion during the daytime, we have observed that error
ranges between 5 % and 10 %. In general, such an er-
ror is reduced when the zoom is applied, except for
close targets. Elements like camera altitude, wind ex-
posure, and the precision of the detection given by the
network affect the results. As a consequence, the view
and stabilization of the scene for further computations
become a tough task.
Regarding nighttime results, nightly conditions
strongly influence the estimation of far ships, provid-
ing imprecise estimations than the daytime approach.
The use of different thresholds and a fixed grid con-
figuration, affect the outcome as well. Thus, ships in
different positions are assigned to very similar lati-
tudes, and considering the magnitude of distances in
the maritime environment, this fact induces errors in
the remote evaluations.
Future work relies on hardware and software im-
provements. The daytime technique would be bene-
fited by improving camera location, in order to pro-
vide a better perspective, paving the way for bet-
ter distance estimation. Furthermore, the addition of
complementary cameras could improve the detection
of ships, mainly when they are hidden from the cur-
rent single-camera perspective. This contributes to
a wider view, improving region coverage to a possi-
ble security system. To deal with discrepancies re-
garding moving vessels, using the heading and speed
data from AIS devices to compute their new position
would help to improve the results. The nighttime ap-
proach could be improved in two ways. Firstly, us-
ing a dynamic size and position for the grid in the re-
gions of interest, including enhancing the lower mar-
gin of the bounding box, to contain the boat’s water-
line. Secondly, the use of a night camera is another
possibility, although its cost is a disadvantage.
ACKNOWLEDGEMENTS
This research is the result of a collaboration be-
tween QAISC and researchers from CTIM, within the
framework of the research contract C2021/193 signed
between the company and The Canarian Science and
Technology Park Foundation of the University of Las
Palmas de Gran Canaria. We specially thank to Prof.
Agust
´
ın Trujillo.
It also has been partially supported by Vi-
cepresidencia Primera, Consejer
´
ıa de Vicepresiden-
cia Primera y de Obras P
´
ublicas, Infraestructuras,
Maritime Surveillance by Multiple Data Fusion: An Application Based on Deep Learning Object Detection, AIS Data and Geofencing
853

(a) Ships’ detection and detail
(b) Geofencing map (c) Geofencing scene
Figure 8: Detection and geofencing of a small boat in the Port of Las Palmas: (a) original scene and detail of a small boat
without AIS system, (b) geofencing on the map, and (c) geofencing on the scene.
Transporte y Movilidad from Cabildo de Gran Ca-
naria, through the project of reference Resolution No.
45/2021 and by The Canarian Science and Technol-
ogy Park Foundation of the University of Las Pal-
mas de Gran Canaria through the research project
F2021/05 FEI Innovaci
´
on y Transferencia empresar-
ial.
We also thank the Oceanic Platform of the Canary
Islands (PLOCAN) and The Port Authority of Las
Palmas for their authorization to use their coastal ob-
servation facility and their support within the frame-
work of the ”Smart Coast AI SOLUTIONS BLUE
ECONOMY LAB” initiative led by QAISC in col-
laboration with CTIM.
REFERENCES
Arshad, N., Moon, K.-S., and Kim, J.-N. (2010). Multiple
Ship Detection and Tracking Using Background Reg-
istration and Morphological Operations. In Kim, T.-
h., Pal, S. K., Grosky, W. I., Pissinou, N., Shih, T. K.,
and Slkezak, D., editors, Signal Processing and Mul-
timedia, pages 121–126, Berlin, Heidelberg. Springer
Berlin Heidelberg.
Ballines Barrera, S. (2020a). Detecci
´
on de objetos en el en-
torno mar
´
ıtimo mediante dispositivos AIS y c
´
amaras
PTZ. Master’s thesis, University of Las Palmas de
Gran Canaria.
Ballines Barrera, S. (2020b). Identificaci
´
on y detecci
´
on
de objetos m
´
oviles mediante redes neuronales emple-
ando el sistema NVIDIA Jetson TX2. Master’s thesis,
University of Las Palmas de Gran Canaria.
Bloisi, D., Iocchi, L., Fiorini, M., and Graziano, G. (2012).
Camera based target recognition for maritime aware-
ness. In 2012 15th International Conference on Infor-
mation Fusion, pages 1982–1987. IEEE.
Bochkovskiy, A., Wang, C., and Mark Liao, H. (2020).
YOLOv4: Optimal Speed and Accuracy of Ob-
ject Detection. arXiv preprint arXiv:2004.10934,
abs/2004.10934.
Chen, J., Chen, Y., and Yang, J. (2009). Ship Detection
Using Polarization Cross-Entropy. IEEE Geoscience
and Remote Sensing Letters, 6(4):723–727.
Chen, Z., Chen, D., Zhang, Y., Cheng, X., Zhang, M.,
and Wu, C. (2020). Deep learning for autonomous
ship-oriented small ship detection. Safety Science,
130:104812.
Frost, D. and Tapamo, J.-R. (2013). Detection and track-
ing of moving objects in a maritime environment us-
ing level set with shape priors. EURASIP Journal on
Image and Video Processing, 2013(1):1–16.
Fu, H., Song, G., and Wang, Y. (2021a). Improved yolov4
marine target detection combined with cbam. Symme-
try, 13(4).
Fu, H., Zhang, R., Ning, X., and Wang, Y. (2021b). Ship
detection based on improved yolo algorithm. In 2021
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
854

40th Chinese Control Conference (CCC), pages 8181–
8186.
Gerum, R. C., Richter, S., Winterl, A., Mark, C., Fabry, B.,
Le Bohec, C., and Zitterbart, D. P. (2019). Camera-
Transform: A Python package for perspective correc-
tions and image mapping. SoftwareX, 10:1–6.
Harre, I. (2000). Ais adding new quality to vts systems.
Journal of Navigation, 53(3):527–539.
Hu, W.-C., Yang, C.-Y., and Huang, D.-Y. (2011). Ro-
bust real-time ship detection and tracking for vi-
sual surveillance of cage aquaculture. Journal of
Visual Communication and Image Representation,
22(6):543–556.
Kaluza, P., K
¨
olzsch, A., Gastner, M. T., and Blasius, B.
(2010). The complex network of global cargo ship
movements. Journal of the Royal Society Interface,
7(48):1093–1103.
Kang, M., Ji, K., Leng, X., and Lin, Z. (2017). Con-
textual Region-Based Convolutional Neural Network
with Multilayer Fusion for SAR Ship Detection. Re-
mote Sensing, 9(8):1–14.
Larson, K. M., Shand, L., Staid, A., Gray, S., Roesler, E. L.,
and Lyons, D. (2022). An optical flow approach to
tracking ship track behavior using goes-r satellite im-
agery. IEEE Journal of Selected Topics in Applied
Earth Observations and Remote Sensing, 15:6272–
6282.
Last, P., Bahlke, C., Hering-Bertram, M., and Linsen, L.
(2014). Comprehensive Analysis of Automatic Identi-
fication System (AIS) Data in Regard to Vessel Move-
ment Prediction. Journal of Navigation, 67(5):791—-
809.
Li, H. and Man, Y. (2016). Moving ship detection based on
visual saliency for video satellite. In 2016 IEEE Inter-
national Geoscience and Remote Sensing Symposium
(IGARSS), pages 1248–1250.
Lin, T.-Y., Maire, M., Belongie, S., Hays, J., Perona, P., Ra-
manan, D., Doll
´
ar, P., and Zitnick, C. L. (2014). Mi-
crosoft COCO: Common Objects in Context. In Euro-
pean Conference on Computer Vision – ECCV 2014,
pages 740–755. Springer, Springer International Pub-
lishing.
Moosbauer, S., K
¨
onig, D., J
¨
akel, J., and Teutsch, M. (2019).
A Benchmark for Deep Learning Based Object Detec-
tion in Maritime Environments. In Proceedings of the
IEEE/CVF Conference on Computer Vision and Pat-
tern Recognition (CVPR) Workshops, pages 916–925.
Prasad, D. K., Dong, H., Rajan, D., and Quek, C. (2020).
Are object detection assessment criteria ready for mar-
itime computer vision? IEEE Transactions on Intelli-
gent Transportation Systems, 21(12):5295–5304.
Satyanarayanan, M. (2017). The Emergence of Edge Com-
puting. Computer, 50(1):30–39.
Shao, Z., Wu, W., Wang, Z., Du, W., and Li, C. (2018). Sea-
Ships: A Large-Scale Precisely Annotated Dataset for
Ship Detection. IEEE Transactions on Multimedia,
20(10):2593–2604.
Simonsen, C., Theisson, F., Holtskog, Ø., and Gade, R.
(2020). Detecting and locating boats using a ptz
camera with both optical and thermal sensors. In
Farinella, G., Radeva, P., and Braz, J., editors, Pro-
ceedings of the 15th International Joint Conference
on Computer Vision, Imaging and Computer Graph-
ics Theory and Applications, volume 5, pages 395–
403. SCITEPRESS Digital Library. 15th International
Joint Conference on Computer Vision, Imaging and
Computer Graphics Theory and Applications, VISI-
GRAPP 2020 ; Conference date: 27-02-2020 Through
29-02-2020.
Sirimanne, S. N., Hoffmann, J., Asariotis, R., Ayala, G.,
Assaf, M., Bacrot, C., Benamara, H., Chantrel, D.,
Cournoyer, A., Fugazza, M., Hansen, P., Kulaga,
T., Premti, A., Rodr
´
ıguez, L., Salo, B., Tahiri, K.,
Tokuda, H., Ugaz, P., and Youssef, F. (2021). Review
of Maritime Transport 2021. United Nations Con-
ference on Trade and Development (UNCTAD), New
York: United Nations.
Tu, E., Zhang, G., Rachmawati, L., Rajabally, E., and
Huang, G.-B. (2018). Exploiting AIS Data for Intelli-
gent Maritime Navigation: A Comprehensive Survey
From Data to Methodology. IEEE Transactions on In-
telligent Transportation Systems, 19(5):1559–1582.
Wang, N., Wang, Y., and Er, M. J. (2022). Review on
deep learning techniques for marine object recogni-
tion: Architectures and algorithms. Control Engineer-
ing Practice, 118:104458.
Wang, Y., Wang, C., Zhang, H., Dong, Y., and Wei, S.
(2019). Automatic ship detection based on retinanet
using multi-resolution gaofen-3 imagery. Remote
Sensing, 11(5).
Xiaorui, H. and Changchuan, L. (2011). A Preliminary
Study on Targets Association Algorithm of Radar and
AIS Using BP Neural Network. Procedia Engineer-
ing, 15:1441–1445.
Yang, X., Sun, H., Fu, K., Yang, J., Sun, X., Yan, M.,
and Guo, Z. (2018). Automatic Ship Detection in Re-
mote Sensing Images from Google Earth of Complex
Scenes Based on Multiscale Rotation Dense Feature
Pyramid Networks. Remote Sensing, 10(1):1–14.
Zhang, R., Li, S., Ji, G., Zhao, X., Li, J., and Pan, M. (2021).
Survey on deep learning-based marine object detec-
tion. Journal of Advanced Transportation.
Zhao, H., Zhang, W., Sun, H., and Xue, B. (2019). Embed-
ded deep learning for ship detection and recognition.
Future Internet, 11(2).
Maritime Surveillance by Multiple Data Fusion: An Application Based on Deep Learning Object Detection, AIS Data and Geofencing
855
