
Conflicting Moral Codes for Self-Driving Cars: The Single Car Case
Ahmed Ibrahim , Yasmin Mansy, Nourhan Ehab and Amr Elmougy
Computer Science and Engineering Department, German University in Cairo, Cairo, Egypt
Keywords:
Conflict Resolution, Thomas Kilmann Model, Self-Driving Cars.
Abstract:
There has been incremental advances in the development of self-driving cars. However, there are still several
gaps that must be filled before a fully autonomous vehicle can be achieved. The ability to resolve conflicts
in the event of an unavoidable accident is one of the most prominent and crucial aspects of a self-driving car
that is currently absent. To address this gap, this paper aims to resolve moral conflicts in self-driving cars in
the case of an unavoidable accidents. Assuming we have a predefined rule set that specifies how a car should
morally react, any clash between these rules could result in a critical conflict. In this paper, we propose a novel
procedure to resolve such conflicts by combining the Thomas Kilmann conflict resolution model together with
decision trees. Evaluation results showcase that our proposed procedure excels in distinct ways, enabling the
self-driving car to make a decision that will yield the best moral outcome in conflicting scenarios.
1 INTRODUCTION
Driving a vehicle with minimum human intervention
is no longer science fiction (Cowger Jr, 2018). Cur-
rently, the automotive industry is undergoing a quan-
tum shift towards a future in which the driver’s role in
operating his or her vehicle will diminish to the point
of being eliminated (Barabas et al., 2017). For a self-
driving car to reach a stage where it would be fully
autonomous, it must be able to make faster decisions
under a wide range of situations, which could include
moral dilemmas such as choosing which potential vic-
tims to avoid. Such situations include unavoidable
accidents where life and death decisions have to be
made.
Although autonomous vehicles will eliminate the
major cause of human error, unavoidable deadly ac-
cidents, where the vehicle must make a life-or-death
decision in a fraction of a second, cannot be prevented
(Borenstein et al., 2017). In situations where moral
decisions need to be made by the vehicle, an ethical
framework must be implemented, where a predefined
set of rules would allow the car to react. However,
if these rules contradict, the car would be unable to
determine a proper action, leading to a conflict. As
discussed later in this study, this must be resolved to
prevent catastrophic losses from indecision.
Accordingly, the objective of this research which
is to apply different conflict resolution techniques to
resolve conflicts that may arise due to various factors
that would be discussed in further details later in this
study, allowing the self-driving car to react in a timely
manner. As such, the ability to resolve conflicts that
may arise within a single self-driving vehicle has not
been previously addressed. In addition, the Thomas
Kilmann Model has primarily been used to resolve
conflicts between humans. Since we are attempting
to imitate a human-like trait, ethics, it stands to rea-
son that in order to imitate the ways in which con-
flicts in ethics should be resolved, we would need to
employ another negotiation method used by humans,
which has not been attempted before to resolve con-
flicts within self-driving vehicles using the Thomas
Kilmann Model in previous literature. Thus, the aim
is to provide a fast and accurate conflict resolution
technique that would allow self-driving cars to resolve
the conflict and react on time in case of an unavoid-
able accident. With the help of the Carla simulator
and ScenarioRunner, it is possible to build complex
conflicting scenarios where different resolution tech-
niques can be applied to imitate a real-world scenario
as closely as possible.
The rest of this paper is structured as follows. Sec-
tion 2 will present necessary background. Section
3 describes the proposed conflict resolution model.
Section 4 presents the evaluation of the proposed
model. Finally, Section 5 outlines some concluding
remarks.
Ibrahim, A., Mansy, Y., Ehab, N. and Elmougy, A.
Conflicting Moral Codes for Self-Driving Cars: The Single Car Case.
DOI: 10.5220/0011677500003393
In Proceedings of the 15th International Conference on Agents and Artificial Intelligence (ICAART 2023) - Volume 1, pages 249-256
ISBN: 978-989-758-623-1; ISSN: 2184-433X
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
249
2 BACKGROUND
Unavoidable accidents are described as crucial situ-
ations in which no solutions can be developed in the
time available (to a human or self-driving car) to com-
pletely avoid the accident. The focus of this work is
on unavoidable accidents that result in fatalities, or
catastrophes in which human lives are lost. A self-
driving car must decide what action to take in the
event of an unavoidable accident, which includes de-
ciding on potential casualties. This is only partially
today investigated legally and ethically (Karnouskos,
2018).
2.1 The Need for Ethics
In a research paper by (Lin, 2016), the author provides
a basic scenario demonstrating the need for ethics in
self driving vehicles. When a self-driving car is faced
with a terrible choice in the distant future: where
it would hit an eight-year-old girl if it swerved to
the left, or an 80-year-old grandma if it swerved to
the right. Given the speed of the car, both victims
would almost probably die upon impact. If you do not
swerve, you will hit and kill both victims. Therefore,
there are sufficient reasons to believe that you should
swerve in one of two directions (Lin, 2016). But how
should the vehicle react in such a scenario? There
may be reasons to pick one over the other, regardless
of how unappealing or distressing those reasons may
be. This is a dilemma that is not easily solvable, high-
lighting the importance of ethics in the development
of self-driving cars.
2.2 Conflicts in Decisions
Referring to the same case given in a research paper
by (Patrick, 2016), some may claim that hitting the
grandma is the lesser of two evils, at least in some
people’s eyes. As the girl has her entire life ahead of
her, whereas the grandmother has already lived a full
life and had her fair share of experiences, there are
reasons that seem to weigh in favor of saving the little
girl over the grandmother, if an accident is unavoid-
able.
But what if there were two girls of the same age
on each side of the road? Even if an autonomous car
with an ethical framework can select between the two
evils. Both sides would have equal priority according
to the car’s framework, having the same age, gender,
and any other aspect the car could compare to. Re-
sulting in a conflict since the car can no longer make
a decision. So even if we develop an ethical frame-
work capable of resolving such complex scenarios in
an attempt to replicate a human trait, conflicts will
still arise. Conflicts can arise for a number of reasons,
some of which are predictable and could be avoided,
while others we would not even know about.
Some might argue that future cars will not have to
make difficult ethical decisions, that stopping the car
or handing control to the human driver is the easy way
around ethics. However, braking and handing over
control will not always be enough. These solutions
may be the best we have today, but if automated cars
are ever to be used more widely outside of limited
highway environments, they will need more response
capabilities (Lin, 2016).
In future autonomous cars, crash-avoidance fea-
tures alone will not be sufficient. Sometimes an ac-
cident will be unavoidable as a matter of physics,
for myriad reasons–such as insufficient time to press
the brakes, technological errors, misaligned sen-
sors, terrible weather conditions, and just pure bad
luck. Therefore, self-driving cars will require crash-
optimization strategies.
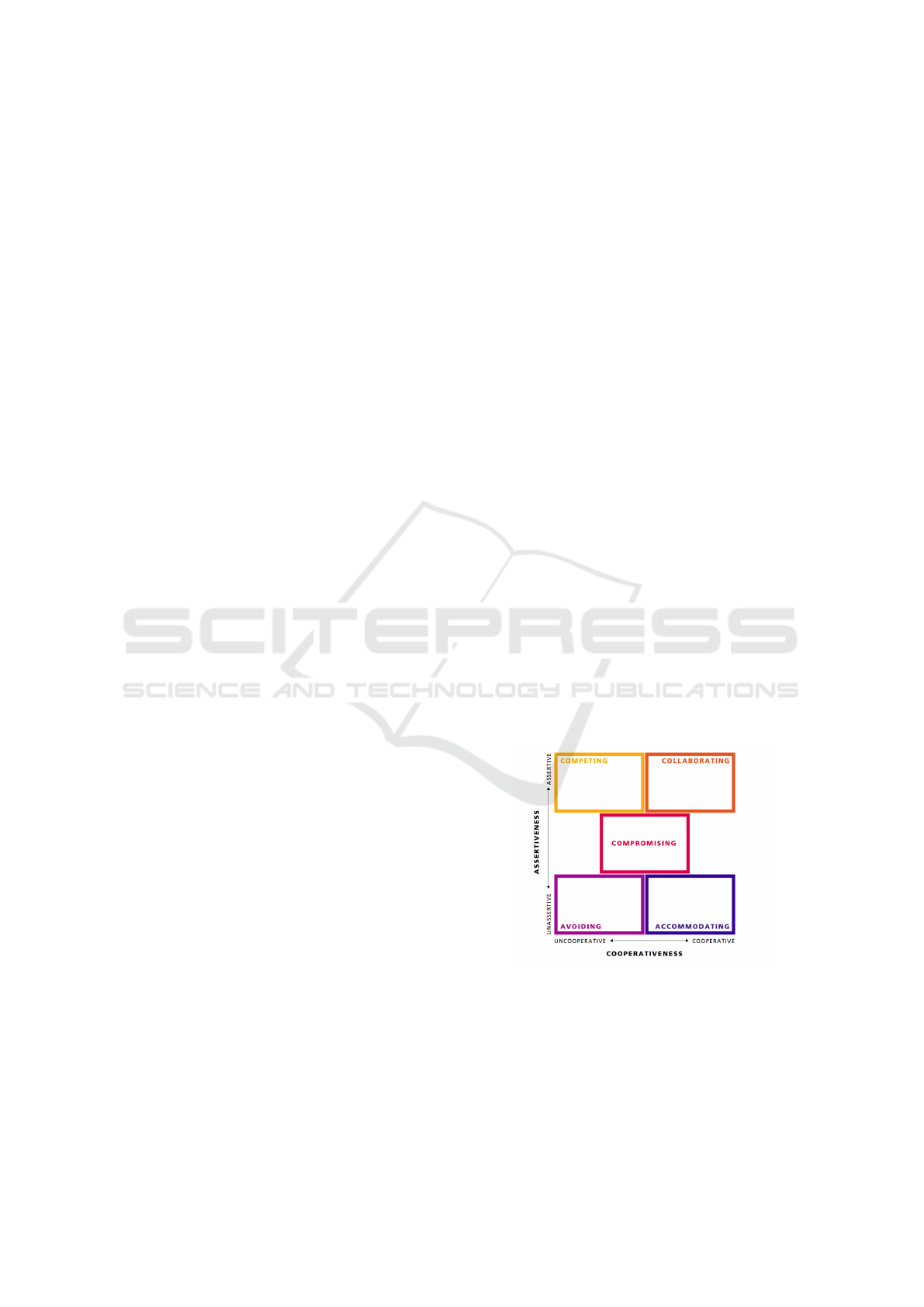
2.3 Thomas-Kilmann Conflict Model
In 1974, Kenneth W. Thomas and Ralph H. Kilmann
introduced the ThomasKilmann Conflict Mode In-
strument, which is presented as an alternative ap-
proach to the arising conflicts. The Thomas-Kilmann
model identifies five distinct conflict resolution be-
haviours and how they effect problem resolution. As
illustrated in Figure 1, the various types of behaviour
reflect various degrees of assertiveness and coopera-
tion (Fahy et al., 2021).
Figure 1: Thomas-Kilmann Conflict Model.
The Thomas-Kilmann technique has primarily
been used to resolve conflicts in human-to-human ne-
gotiations. It has previously been used to resolve
conflicts between medical staff in pediatric surgery.
(Fahy et al., 2021). This is a real-time, critical,
and time-sensitive situation in which a decision made
could mean the difference between life and death.
ICAART 2023 - 15th International Conference on Agents and Artificial Intelligence
250
And must be made within a matter of seconds. This
is very similar to the situations we would face in the
event of an unavoidable accident, where the conflicts
must be resolved within very short deadlines. Fur-
thermore, since we are attempting to mimic a human-
like trait, ethics, it stands to reason that in order to
mimic the way conflicts in ethics should be resolved,
we would need to employ another human negotiation
method.
Next, we will analyse the five distinct types of be-
haviour and how they can be utilised to resolve an eth-
ical conflict in the event of an unavoidable accident.
1. Competing: Power-oriented, assertive, and unco-
operative. Having rules/decisions of equal impor-
tance. Each decision uses whatever power seems
appropriate to win that position, by competing on
any aspect favoring one side over the other.
2. Collaborating: assertive and cooperative. Usu-
ally involves two or more entities trying to find a
solution that meets and satisfies both concerns.
3. Compromising: assertive and cooperative. Com-
promising splits the difference or exchanges con-
cessions to find a quick middle-ground position.
4. Avoiding: unassertive and uncooperative. Know-
ing one of two conflicting decisions is wrong al-
lowing for a better decision to be considered.
5. Accommodating: is unassertive and coopera-
tivethe opposite of competingand involves an ele-
ment of self-sacrifice. During conflict resolution,
one side may realise its decision was wrong, thus
backing up allowing for a better solution.
3 CONFLICT RESOLUTION
Our proposed conflict resolution model consists of a
pipeline of three main stages: (1) Collecting diverse
data using a variety of sensors. Along with the for-
mulation of rules that would serve as the car’s ethical
foundation in the event of an unavoidable accident;
(2) Conflict resolution in case moral conflicts arise by
utilizing decision trees; and (3) Deciding which ac-
tions to take after the conflict resolution. The three
stages are described in this section.
3.1 Data & Rule Set
First we start by data collection, CARLA simulator
(Dosovitskiy et al., 2017) was used which is an open-
source autonomous driving simulator that utilize lot
of sensors that vehicles rely on to obtain data from
their surroundings, ranging from cameras to Radar,
LIDAR, and many more.
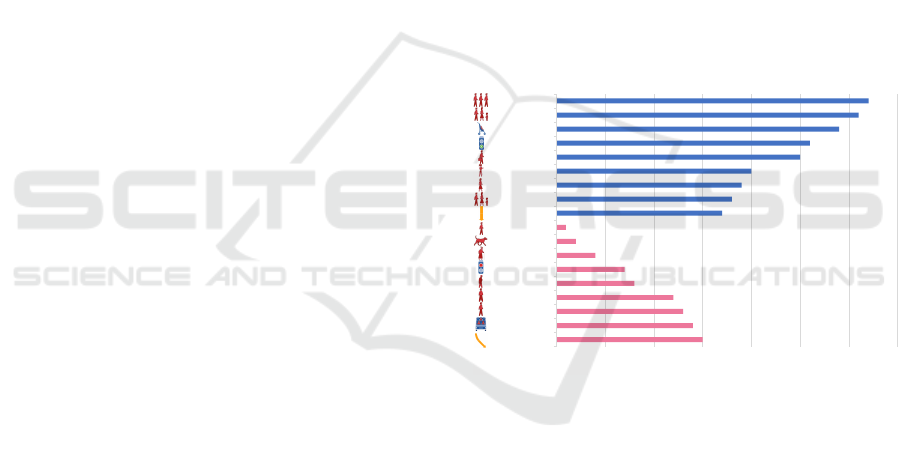
After we are done with data collected using dif-
ferent and various types of sensors, we then referred
to the MIT Moral Machine Experiment (Awad and
Dsouza, 2018) as our rule set. Allowing us to create a
18 priority based rule set as shown in Figure 2.
Having the top 9 rules indicated in blue as the
highest priority rules and the other nine indicated in
red as the lower priority rules. These priorities were
established in the following manner according to a re-
search paper by (Anbar, 1983) on estimating the dif-
ference between two probabilities.
(nd ∗ (1 − (highest∆P − current∆P)) + k
Where n is the number of the rules multiplied by a
factor d and ∆ P is the difference between the proba-
bility of sparing characters having the attribute in blue
and the probability of sparing characters having the
opposing attribute in red (for example Elderly/Young)
(Awad and Dsouza, 2018). And k is an offset that is
larger than the smallest expected negative number in
our rule set.
0 5 10 15 20 25 30 35
Action
Passengers
Males
Large
Lower status
Unlawful
Elderly
Pets
Fewer characters
Inaction
Pedestrians
Females
Fit
Higher status
Lawful
Young
Humans
More characters
Priority
Figure 2: Priority Based Rule Set.
3.2 Conflict Resolution via Decision
Trees
In this work, we use decision trees as means to re-
solve conflicts. A decision tree is an optimal choice
for data structuring since it allow for computational
efficiency and accuracy of classification according to
a research paper by (Safavian et al, 1991) (Safavian
and Landgrebe, 1991).
3.2.1 Types of Conflicts
Decision trees classify any object, in our case a sce-
nario by moving it down the tree from the root to a
leaf node, with the leaf node providing the scenario’s
evaluation. Each node in the tree represents a test case
for some attribute, and each edge descending from
Conflicting Moral Codes for Self-Driving Cars: The Single Car Case
251
that node represents one of the test case’s possible an-
swers. This recursive approach is repeated for each
sub-tree rooted at the new nodes. A priority score can
be assigned at each level moving down the decision
tree and adds up until a leaf node is reached. The
situation with the highest final priority score will be
given the top priority. There are two types of possible
conflicts that can occur:
1. Conflicting Nodes: this form of conflict would
occur within the decision tree nodes themselves.
We classified such types of conflicts into three
main categories.
(a) Comparable Branching: Where an attribute
depends on comparing its value to the other
lanes, such as more (versus less) characters,
having both lanes with the same number of
characters would cause a conflict and prevent
branching to either node.
(b) Mix of Characters: Having a mix of different
characters standing on the same lane, such as
having young and elderly ages standing on the
same lane in certain scenarios, prevents branch-
ing to either node, as illustrated in Figure 3.
(c) Attributes with no Value: Finally, not having
the value for a certain attribute available at a
certain level, which could be due to various fac-
tors such as a lack of time or inaccurate sensors.
2. Conflicting Priority Scores: occurs when the de-
cision tree has been entirely traversed and the as-
signed scores for each lane are exactly equal.
Root
More Characters
Priority: 32
Priority: 1
Priority: 29
Priority: 4
Young Elderly
61
36
Fewer Characters
Priority: 29 Priority: 4
Young
Elderly
30 5
Figure 3: Conflicting decision tree.
3.2.2 Resolution Techniques
We use the Thomas Kilmann model techniques: com-
peting, avoiding, and accommodating. The remain-
ing two techniques (collaborating and compromising)
are not considered since they deal with multi-agent
cases, which is not the focus in this paper. Alongside
the above mentioned techniques, the verifying nodes
technique is used. Since the time required to traverse
the entire tree may exceed the time available before
the collision, the resolution strategies make use of a
deadline by which we must stop traversing the deci-
sion tree and assign the current scores, leaving extra
time to resolve any conflicts if both lanes have the
same priority scores. In what follows, we describe
the operation of the different resolution techniques on
decision trees.
Competing: implies contending over one or more as-
pects that might give one lane an edge over the other.
In our case the competition would be based on two
critical factors, time and highest priority score.
Root
Priority: 32 Priority: 1
More Characters
Priority: 29
Priority: 4
Young
Lawful
Elderly
Fewer Characters
Priority: 29
Priority: 4
Elderly
Young
Unlawful
Lawful
Unlawful
Lawful
Unlawful Lawful
Unlawful
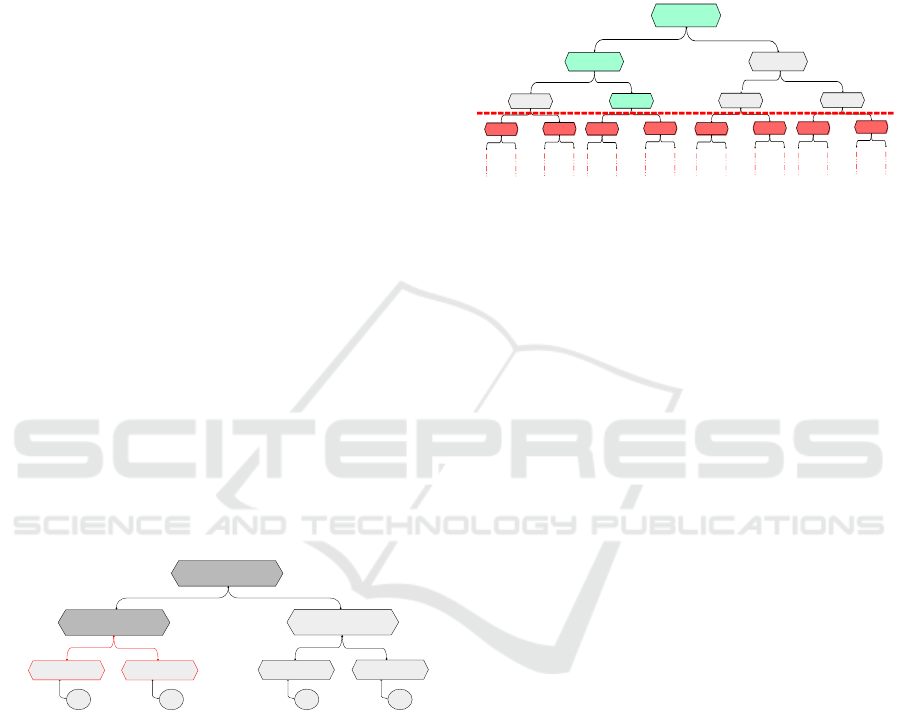
Deadline
Figure 4: Deadline met before traversing entire tree.
Figure 6 illustrates a scenario in which we were
unable to traverse the entire decision tree as we hit the
deadline. Although we ended up with the same prior-
ity score, resulting in a conflict, it is uncertain whether
either of the lanes might have achieved a higher pri-
ority if we had enough time to complete the entire
decision tree.
As there is insufficient time to traverse the entire
tree, the competing technique scans all of the leaf
nodes for each of the two lanes in search of the highest
possible priority score that could have been obtained.
And the one that have the highest possible score is
assigned a higher priority.
Competing is utilized in situations where time is
a prime concern, so time is considered to be a vital
factor. Each lane’s time to reach a final node and
provide a score is recorded, regardless of whether
this final node is a leaf or if the lane did not complete
the entire tree. The quicker a lane was able to receive
a score, the fewer conflicting nodes it encountered
while traversing the tree, resulting in it being faster
and having an advantage over the other lane by
completing the task in less time. And because an
unavoidable accident is an extremely time-sensitive
situation, it would be essential to have a lane with
fewer conflicts and a shorter computation time.
Avoiding: implies admitting that you were mistaken
or knowing that the other side has a better approach
to this circumstance (Schaubhut, 2007).
As shown in Figure 5, lane A contained all Pets,
while lane B contained humans, which should be pri-
oritised according to our rule set. However, lane A
received a higher Priority Score due to the fact that
the traversal of the decision tree was interrupted after
just two levels, resulting in both lanes having equal or
even higher priority to lane A.
ICAART 2023 - 15th International Conference on Agents and Artificial Intelligence
252
Root
Priority: 32 Priority: 1
More Characters
Priority: 31
Priority: 2
Human
Young
Pet
Fewer Characters
Priority: 31
Priority: 2
Pet
Human
Elderly
Young
Elderly
Deadline
Lawful
Lawful
Lawful
Lawful
Lawful
Lawful
Lawful
Lawful
Figure 5: One of the two lanes is a leaf node.
In this case, the decision tree was not entirely
completed. The avoidance technique would be
applied by determining whether or not the final node
for each lane has any children. If a lane came to a
stop at a leaf node. It should declare so and thus avoid
the conflict in the first place, saving us more time
and resulting in a better outcome since the decision
would be made earlier.
Accommodating: is realizing that its own decision
was incorrect, allowing for a better solution to be con-
sidered (Schaubhut, 2007). It is also possible that
the current choice or node has been chosen most of
the time so it would accommodate to allow the other
nodes to contribute to the process of decision making
as well, given that both lanes have equal priority.
Root
More Characters
Young
Elderly
Fewer Characters
Elderly
Young
Correctness: 11/13
Frequency: 13
Correctness: 3/7
Frequency: 7
Correctness: 7/9
Frequency: 9
Correctness: 3/4
Frequency: 4
Correctness: 2/4
Frequency: 4
Correctness: 1/3
Frequency: 3
Figure 6: Correctness and frequency logs.
The main idea behind the accommodating tech-
nique is to record a history log, which is in charge of
two main things:
• Correctness Log. The correctness log stores in-
formation on comparable instances in the same
street or neighbourhood and the ratio at which
choosing this leaf or node was correct.
• Frequency Log. The Frequency log records the
number of times that leaf or node was chosen, al-
lowing for a balance in the frequency at which
each node is chose, given that both nodes have
equal priority.
In the event of a conflict if we have prior knowl-
edge about the accident location or the conflicting de-
cision tree nodes. The accommodating technique ex-
amines the node’s history for each processing lane, as
shown in 6. Starting with the Correctness ratio, if a
node’s correctness ratio is low, it allows for the other
lane to be selected. Similarly, if a node’s frequency is
higher, indicating that it has been selected more fre-
quently, it allows for the other lane to be selected.
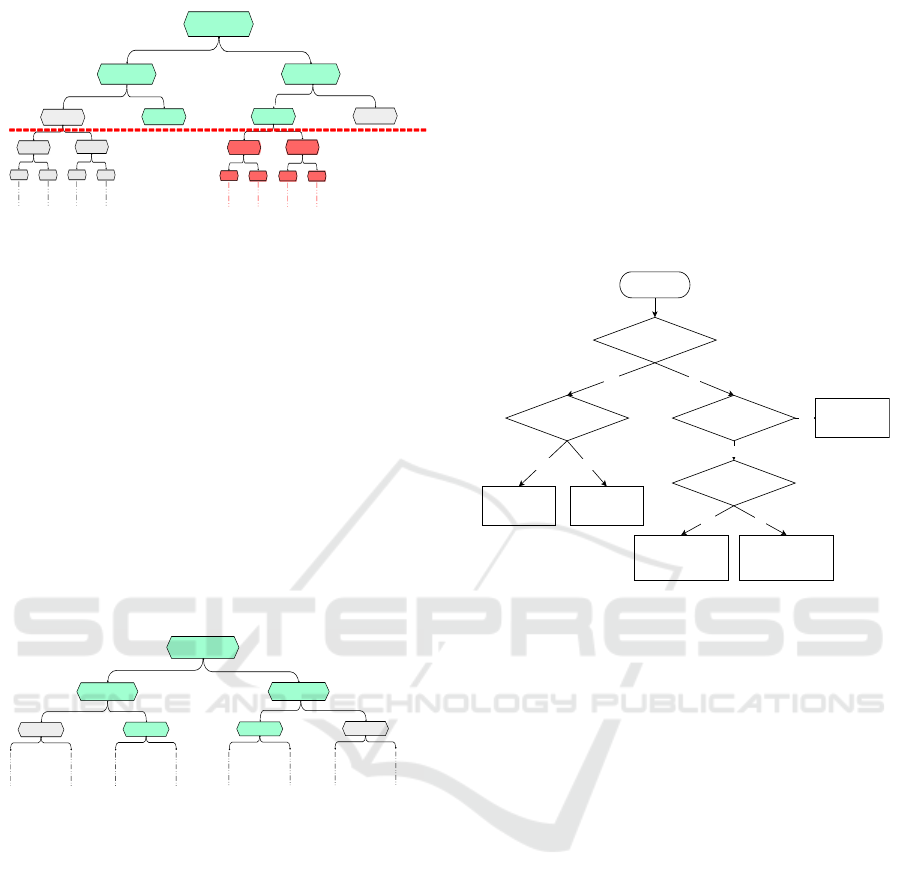
Verifying Nodes: is a method inspired from (Bazan
et al., 2016) establishing a procedure for generating
trees with verifications of cuts defined on numerous
attributes. The distribution of objects based on the op-
timal cut is confirmed in each node of a tree formed
using this method by subsequent cuts on different at-
tributes that separate objects in a similar fashion.
Start
Only lane A is of a
mixed characters?
Characters on
lane B are of a higher
priority?
- Assign higher
priority to lane B.
- Assign lower
priority to lane A.
- Assign higher
priority to lane A.
- Assign lower
priority to lane B.
Ratio of lane A
is higher than ratio of
lane B?
- Assign higher
priority to lane A.
- Assign lower
priority to lane B.
Ratio of lane B
is higher than ratio of
lane A?
- Assign higher priority
to lane B.
- Assign lower priority to
lane A.
Assign zero to both lane
as both have the same
exact ratio, no lane have
an edge over the other.
No
Yes
Yes
No
Yes
Yes No
No
Figure 7: Verifying node flowchart.
The verifying node technique resolve conflicting
nodes where we have a mix of characters standing
within the same lane preventing us from branching as
illustrated earlier in Figure 3.
As shown in Figure 7, we start by comparing one
of the two lanes, let’s call it lane A, to the other, lane
B. If only one of the two lanes contains a mix of char-
acters, we check to see if lane B contains characters
with a higher priority; if it does, lane B is assigned the
higher priority.
In the event that both lanes contained a mix of
characters, the lane with the higher ratio of high-
priority characters is assigned a higher priority.
For the two other conflicting nodes scenarios men-
tioned earlier: comparable branching and having at-
tributes with no value, as the values for both lanes
are equally identically or unknown, we skip that level
of the decision tree and assign zero score for both
lanes at that level, preventing it from affecting the ac-
curacy and final priority scores of either lane.
3.3 Decision Making
The process of decision making depends on two main
factors:
• Time Remaining Before Collision. The time re-
maining determines whether we will be able to
Conflicting Moral Codes for Self-Driving Cars: The Single Car Case
253
traverse the whole tree, and whether we will be
able to run all the conflict resolution techniques
presented within the remaining time.
• The Complexity of the Scenario. Complexity of
the scenario, number of characters, lighting, and
other factors determine the time needed to process
this data and whether missing data will cause node
conflicts that must be resolved, taking more time.
Having one conflict resolution technique resolve
the issue is sufficient to terminate and move forward
with this decision. Different resolution techniques
may be suitable in different situations, as some are
faster and more certain than others. In the next sec-
tion, we’ll examine all the different techniques and
determine which one excels in which aspects.
4 RESULTS & DISCUSSION
To ensure that the presented conflict resolution tech-
nique will be effective in a real-world scenario, and to
analyze and evaluate each of the techniques. This sec-
tion presents the method used to evaluate this project
and the results we obtained.
Carla simulation was used combined with Scenar-
ioRunner To simulate a real-world scenario as closely
as possible, generating conflicting scenarios in which
the proposed resolution techniques can be evaluated.
4.1 Evaluation Technique
Three different metrics were used to evaluate the effi-
ciency of our conflict resolution techniques, that take
into account a range of relevant factors:
• Decidability. In this analysis, we adopt the de-
cidability index d (Williams, 1996), as a measure-
ment index of whether the technique is decidable
and would eventually result in a resolution.
• Correctness. Correctness is the accuracy of a de-
cision, and verifying a technique’s correctness can
be done by comparing its outcome to the top nine
priorities in Figure 2, and calculating a ratio of the
number of rules met against these top nine priori-
ties, which was adopted based on a related line of
research includes robust detection (Huber, 1965).
• Time. The time to reaction has been considered in
the literature (Wagner et al., 2018; Tamke et al.,
2011; Junietz et al., 2018) for which the time
needed by each technique to resolve a conflict
would be measured in a variety of complex sce-
narios, allowing us to determine whether a partic-
ular technique would be able to meet the deadline
and, if not, by how much it missed the deadline.
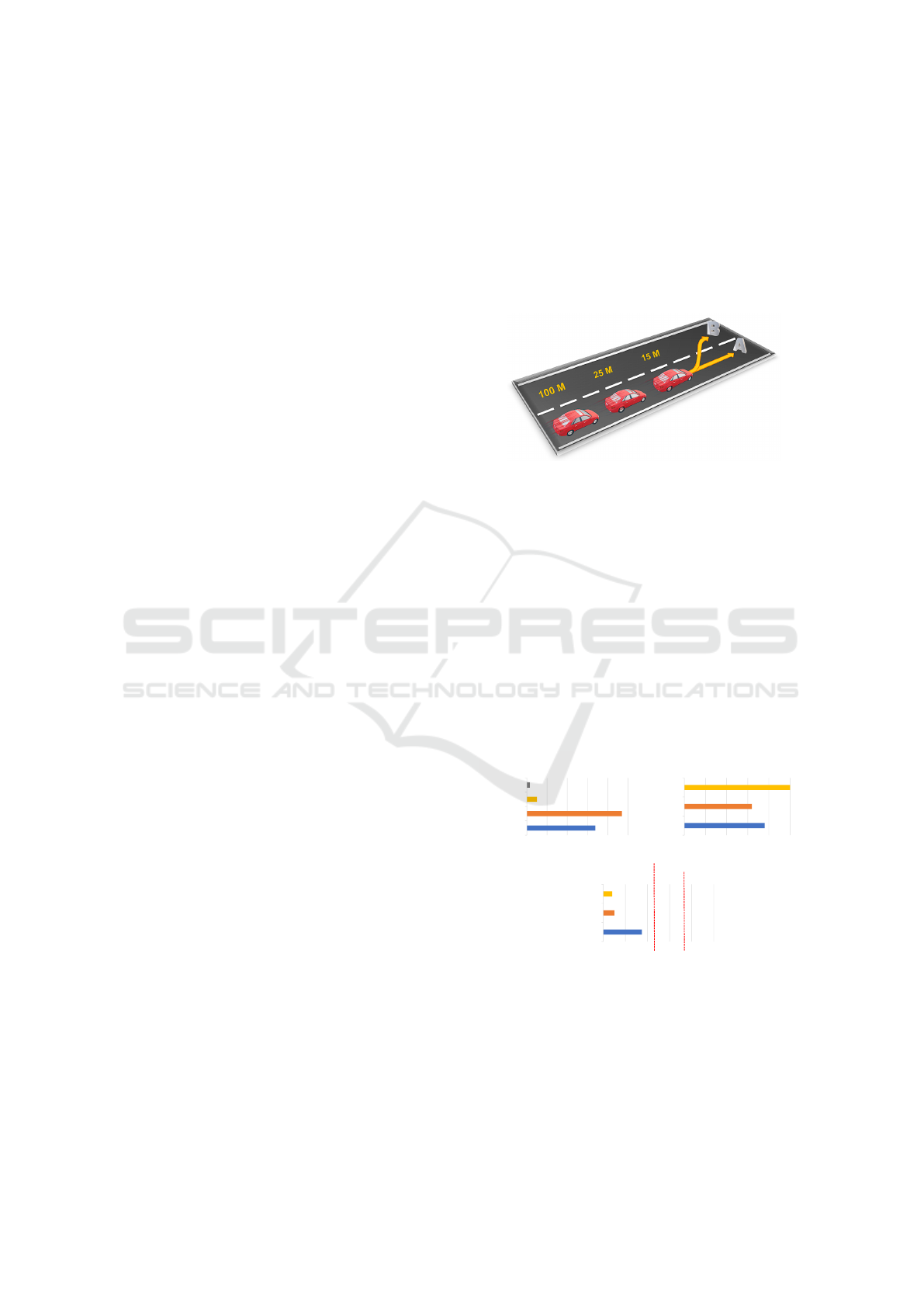
4.2 Testing Scenarios
As shown in Figure 8, all scenarios were ran three dif-
ferent times at three different distances to simulate a
shorter time remaining for reaction and conflict reso-
lution at each point. In each scenario, a random set of
characters were present on lanes A and B, where the
car was faced with a conflicting situation and must
react within the time available.
Figure 8: Evaluation Technique.
To ensure accurate results, a random set of 80 dif-
ferent conflicting scenarios were generated. Having
fifty scenarios represent the case where the entire de-
cision tree could be traversed, while the remaining
thirty scenarios represent the case where there is no
time to traverse the entire decision tree before the
deadline. The results of the two cases are deeply ana-
lyzed in the following section.
4.3 Results
Figure 9 show an overall analysis after running 50
different scenarios that succeeded in traversing the
whole decision tree.
68%
94%
10%
3%
0% 20% 40% 60% 80% 100%
Competing
Accommodating
Avoiding
None
Decidability
76%
64%
100%
0% 20% 40% 60% 80% 100%
Competing
Accommodating
Avoiding
Correctness
0.35s
0.1s
0.08s
0 0.2 0.4 0.6 0.8 1
Competing
Accommodating
Avoiding
Time
Deadline 15m
0.45s
Deadline 25m
0.75s
Figure 9: Results of traversing the whole tree.
Where each of the graphs represented in Figure 9
is discussed in more details below:
• Decidability. In 97% of the cases, we reached
a resolution, with the Accommodating technique
being the most successful, reaching a resolution in
94% of the scenarios, followed by the Competing
ICAART 2023 - 15th International Conference on Agents and Artificial Intelligence
254

technique, with a resolution of 68%, and finally
the Avoiding technique, which only succeeded in
reaching a resolution in 10% of the cases.
• Correctness. Although the Accommodating
technique was the most effective in resolving most
scenarios, it was the least accurate, achieving only
64% accuracy, followed by the Competing tech-
nique with 76% accuracy, and finally the Avoid-
ing technique, which was the most accurate with
100% accuracy in an event of a conflict.
• Time. The Avoiding and Accommodating tech-
niques were the fastest in just under 0.1s, with the
Avoiding technique achieving faster averages by
0.08s. The competing technique was the slow-
est with 0.35s, yet it managed to finish before the
deadline of the shortest distance (0.45s).
4.3.1 Deadline met Analysis
Figure 10 show an overall analysis after running
30 different scenarios that were terminated before
traversing the whole decision tree.
Where each of the graphs represented in Figure 10
is discussed in more details below:
• Decidability. The results this time were rather in-
teresting, with a resolution being reached in 100%
of the cases. The Competing technique was the
most successful, resolving 96% of the scenarios,
followed by the Accommodating technique, with
a resolution of 92%, and finally the Avoiding tech-
nique, with a resolution of only 12%.
• Correctness. The Avoiding technique contin-
ues to be the most accurate with a highest score
of 100%, followed by the Competing technique,
which achieved 78% accuracy, and then the Ac-
commodating technique, which was once again
the least accurate with 67%.
• Time. The Avoiding and Accommodating tech-
niques still achieved nearly identical averages,
with the Avoiding technique remaining faster and
averaging 0.08s, while the competing technique
became even slower with 0.48s, missing the dead-
line for the shortest distance (0.45s) and therefore
failing to resolve the conflict in the third and clos-
est run at 15m.
5 DISCUSSION
The purpose of this research was to reach a resolution
in the first place in the event of a conflict. The results
in section 4.3 show that in either case, whether the
96%
92%
12%
0% 20% 40% 60% 80% 100%
Competing
Accommodating
Avoiding
Decidability
78%
67%
100%
0% 20% 40% 60% 80% 100%
Competing
Accommodating
Avoiding
Correctness
0.48s
0.1s
0.08s
0 0.2 0.4 0.6 0.8 1
Competing
Accommodating
Avoiding
Time
Deadline 15m
0.45s
Deadline 25m
0.75s
Figure 10: Deadline met before traversing whole tree.
algorithm managed to fully traverse the decision tree
or not, it managed to resolve the conflict in 97% of all
the scenarios generated.
Leaving 3% of scenarios in which the scenarios
were near identical and there were basically no differ-
ences between the two lanes; at this point, choosing
one or the other randomly would not make a differ-
ence, given that the analyses conducted were unable
to distinguish between them.
5.1 Comparing Different Techniques
The Competing technique provides the best result of
all techniques, reaching a resolution in most cases
while excelling in situations where the algorithm
couldn’t traverse the entire decision tree. Having a
decidability of 96% and an accuracy of greater than
75%, covers situations where there was insufficient
time to traverse the entire tree. The main drawback
is that it is the slowest, as it takes longer to check all
the leaves of the decision tree to determine which lane
could have earned the maximum potential score.
The Avoiding technique provided the most accu-
rate result, with an accuracy of 100% in both cases,
As if the decision tree traversal had not been termi-
nated, the decision tree scores would not have been
conflicting in the first place, with one of the lanes hav-
ing a higher priority than the other. Furthermore, It’s
also the fastest among them all. The main downside is
that, only 11% of scenarios are decidable on average.
The Accommodating technique had the highest
decidability in both cases, at 93%, ensuring a reso-
lution if the others failed. However, it had the low-
est correctness, with an average of 66%; this percent-
age would increase as the self-driving car encountered
more roads and scenarios, as it is the only technique
that relies on the history log. Therefore, the more data
that is available, the more precise the results will be.
In conclusion, the three techniques excel in dis-
tinct aspects. Therefore, integrating the results of all
Conflicting Moral Codes for Self-Driving Cars: The Single Car Case
255

three techniques to enable the self-driving car to
make a decision would yield the best possible results.
6 CONCLUSIONS & FUTURE
WORK
The aim of the paper was to resolve conflicts that
could arise in a self-driving car in the event of un-
avoidable accidents. A conflict resolution technique
was implemented using the Thomas-Kilmann Con-
flict Model, along with the Verifying Nodes technique
to resolve the conflicts that may arise. Both tech-
niques were applied over a decision tree that was con-
structed based on the MIT Moral Machine Experi-
ment results (Awad and Dsouza, 2018). We managed
to create a system where we tested 80 different con-
flicting scenarios achieving a decidability of 97% in
the scenarios, and an average accuracy of 80%. Over-
all, we managed to resolve 97% of the conflicting sce-
narios generated, in an average of just 0.2 seconds,
leaving out only 3% where the scenarios were fairly
identical that randomly choosing one over the other
would have made no difference.
Future research can go in several directions. First,
the presented testing scenarios can be enriched by
gathered more data about the environment using im-
age processing techniques. The behaviour of the pro-
posed conflict-resolution model can then be further
verified. It is also worth investigating the combina-
tion of the three different resolution techniques which
could potentially result in faster and even more ac-
curate results. Extending the work presented in this
paper beyond the single car case to resolve conflicts
among a swarm of cars is also a natural next step.
REFERENCES
Anbar, D. (1983). On estimating the difference between two
probabilities, with special reference to clinical trials.
Biometrics, pages 257–262.
Awad, E. and Dsouza (2018). The moral machine experi-
ment. Nature, 563(7729):59–64.
Barabas, I., Todorut¸, A., Cordos¸, N., and Molea, A. (2017).
Current challenges in autonomous driving. In IOP
conference series: materials science and engineering,
volume 252, page 012096. IOP Publishing.
Bazan, J. G., Bazan-Socha, S., Buregwa-Czuma, S., Dydo,
L., Rzasa, W., and Skowron, A. (2016). A classifier
based on a decision tree with verifying cuts. Funda-
menta Informaticae, 143(1-2):1–18.
Borenstein, J., Herkert, J., and Miller, K. (2017). Self-
driving cars: Ethical responsibilities of design en-
gineers. IEEE Technology and Society Magazine,
36(2):67–75.
Cowger Jr, A. R. (2018). Liability considerations when au-
tonomous vehicles choose the accident victim. J. High
Tech. L., 19:1.
Dosovitskiy, A., Ros, G., Codevilla, F., Lopez, A., and
Koltun, V. (2017). Carla: An open urban driving sim-
ulator. In Conference on robot learning, pages 1–16.
PMLR.
Fahy, A. S., Mueller, C., and Fecteau, A. (2021). Con-
flict resolution and negotiation in pediatric surgery.
In Seminars in Pediatric Surgery, volume 30, page
151100. Elsevier.
Huber, P. J. (1965). A robust version of the probability ra-
tio test. The Annals of Mathematical Statistics, pages
1753–1758.
Junietz, P., Bonakdar, F., Klamann, B., and Winner, H.
(2018). Criticality metric for the safety validation of
automated driving using model predictive trajectory
optimization. In 2018 21st International Conference
on Intelligent Transportation Systems (ITSC), pages
60–65. IEEE.
Karnouskos, S. (2018). Self-driving car acceptance and
the role of ethics. IEEE Transactions on Engineering
Management, 67(2):252–265.
Lin, P. (2016). Why ethics matters for autonomous cars. In
Autonomous driving, pages 69–85. Springer, Berlin,
Heidelberg.
Safavian, S. R. and Landgrebe, D. (1991). A survey of de-
cision tree classifier methodology. IEEE transactions
on systems, man, and cybernetics, 21(3):660–674.
Schaubhut, N. A. (2007). Thomas-kilmann conflict mode
instrument. CPP Research Department.
Tamke, A., Dang, T., and Breuel, G. (2011). A flexible
method for criticality assessment in driver assistance
systems. In 2011 IEEE Intelligent Vehicles Sympo-
sium (IV), pages 697–702. IEEE.
Wagner, S., Groh, K., Kuhbeck, T., Dorfel, M., and Knoll,
A. (2018). Using time-to-react based on naturalistic
traffic object behavior for scenario-based risk assess-
ment of automated driving. In 2018 IEEE Intelligent
Vehicles Symposium (IV), pages 1521–1528. IEEE.
Williams, G. O. (1996). The use of d’as a decidability index.
In 1996 30th Annual International Carnahan Confer-
ence on Security Technology, pages 65–71. IEEE.
ICAART 2023 - 15th International Conference on Agents and Artificial Intelligence
256
