
A Study Toward Multi-Objective Multiagent Reinforcement Learning
Considering Worst Case and Fairness Among Agents
Toshihiro Matsui
a
Nagoya Institute of Technology, Gokiso-cho Showa-ku Nagoya Aichi 466-8555, Japan
Keywords:
Multiagent System, Multi-Objective, Reinforcement Learning, Cooperative Problem Solving, Fairness,
Leximin.
Abstract:
Multiagent reinforcement learning has been studied as a fundamental approach to empirically optimize the
policies of cooperative/competitive agents. A previous study proposed an extended class of multi-objective
reinforcement learning whose objectives correspond to individual agents, and the worst case and fairness
among the objectives was considered. However, that work concentrated on the case of joint-state-action space
that is handled by a centralized learner performing an offline learning. Toward decentralized solution methods,
we investigate the situations including on-line learning where agents individually own their learning tables
and selects optimum joint actions by cooperatively combining the decomposed tables with other agents. We
experimentally investigate the possibility and influence of the decomposed approach.
1 INTRODUCTION
Reinforcement learning (Sutton and Barto, 1998) is a
form of machine learning where an agent experimen-
tally learns its optimal policy in an environment based
on exploration and exploits with rewards/costs from
the environment. In multiagent reinforcement learn-
ing, agents cooperatively/competitively learn their
policies. As extended classes of reinforcement learn-
ing, multi-objective reinforcement learning (Liu et al.,
2015; Moffaert et al., 2013) for single agent sys-
tems and the learning for equilibrium among multiple
agents (Hu and Wellman, ; Hu et al., 2015; Awheda
and Schwartz, 2016) have been studied.
In this paper, we focus on the multi-objective rein-
forcement learning where each agent has its own ob-
jective. Improving fairness among agents is critical
in the practical domains of multiagent reinforcement
learning. For example, when cooperative robots have
limited power resources, the equalization/leveling of
resource consumption might be an issue to reduce the
inequality of robots’ lifetime.
A previous study (Matsui, 2019) proposed an ex-
tended class of multi-objective reinforcement learn-
ing whose objectives correspond to individual agents,
and the worst case and fairness among the objectives
were considered. In that study, each objective is de-
a
https://orcid.org/0000-0001-8557-8167
fined as the total cost of actions of an agent in an
episode, and the objectives are simultaneously opti-
mized improving their fairness. For this optimization,
the multi-objective reinforcement learning has been
extended by employing a criterion that considers the
worst case and fairness, and the effect of the proposed
approach was experimentally shown in a pursuit prob-
lem domain. However, the previous work concen-
trated on the case of joint state-action space that is
handled by a centralized learner, and only a case of
off-line learning was addressed.
In related studies of multi-agent reinforcement
learning (Zhang and Lesser, 2012; Nguyen et al.,
2014), the global problem is decomposed into mul-
tiple agents. Although the agents manage their own
learning tables, they select the best joint action by per-
forming a cooperative protocol that aggregates the in-
formation of individual learning tables and optimizes
joint actions.
Toward a decentralized solution method, we ex-
tend the previous study in multi-objective reinforce-
ment learning for fairness among multiple agents to
investigate the case of learning tables decomposed to
agents with joint action selection based on the tables.
We also investigate the possibility of on-line learn-
ing with the decomposed setting. We experimentally
show the possibilities and influence of the decom-
posed approach.
Matsui, T.
A Study Toward Multi-Objective Multiagent Reinforcement Learning Considering Worst Case and Fairness Among Agents.
DOI: 10.5220/0011687100003393
In Proceedings of the 15th International Conference on Agents and Artificial Intelligence (ICAART 2023) - Volume 1, pages 269-277
ISBN: 978-989-758-623-1; ISSN: 2184-433X
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
269

2 PRELIMINARY
We present the background of our study by referring
to previous study (Matsui, 2019).
2.1 Multi-Objective Reinforcement
Learning
Reinforcement learning is a machine learning method
where an agent experientially obtains an optimal pol-
icy that is a sequence of its own actions in an environ-
ment (Sutton and Barto, 1998). An agent observes its
current state s ∈ S and performs action a ∈ A. Then
the agent receives a reward or cost value from the en-
vironment. By exploring an environment, an agent
updates its learning table that represents the values of
(s, a) ∈ S × A and selects its optimal action based on
the learning table. The learning rule of Q-learning on
minimization problems is as follows.
Q(s, a) ← (1 − α)Q(s, a) + α(c + γ min
a
0
Q(s
0
, a
0
)) .
(1)
Here Q(s, a) denotes the Q-table to be learned, and
c is the current cost received from an environment.
Parameters α and γ are the learning and discount rates,
respectively.
Multi-objective reinforcement learning has been
studied to simultaneously optimize multiple objec-
tives (Liu et al., 2015). That introduces the ap-
proaches of multi-objective optimization problems
into reinforcement learning. The above Q-leaning
with single objectives is extended to a multi-objective
Q-learning:
Q
Q
Q(s, a) ← (1 − α)Q
Q
Q(s, a) + α(c
c
c + γ minws(v
v
v, Q
Q
Q(s
0
, a
0
))) .
(2)
‘minws’ is a minimization operator based
on a weighted summation with vector v
v
v:
argmin
Q
Q
Q(s
0
,a
0
) for a
0
v
v
v · Q
Q
Q(s
0
, a
0
). For multiple ob-
jectives, single cost values are extended to cost
vectors, and learning is performed based on the
scalarization/filtering criteria of multi-objective
optimization problems. The above operation of
‘minws’ can be replaced by other operators based
on different criteria employed for multi-objective
optimization. We concentrate on the above case
of single policy learning that can be handled with
relatively reasonable computational cost.
Although a major part of studies on multi-
objective reinforcement learning addresses the case of
a single agent system with different objectives, multi-
objective optimization among individual agents can
be issues to be investigated.
2.2 Learning Joint Policy Considering
Bottleneck and Fairness
A previous study (Matsui, 2019) proposed a solu-
tion method based on multi-objective reinforcement
learning and a criterion to optimize the joint policies
of agents. Here individual agents’ total action cost
values are simultaneously optimized improving the
worst case and fairness. This approach extends multi-
objective Q-learning to employ the leximax criterion
that considers fairness and the worst case among mul-
tiple objectives. Leximax is a variant of a similar cri-
terion called leximin for maximization problems.
The leximax is defined with a dictionary order on
sorted objective vectors whose values are sorted in de-
scending order (Bouveret and Lema
ˆ
ıtre, 2009; Greco
and Scarcello, 2013; Matsui et al., 2018). Suppose
that v
v
v = [v
1
, ··· , v
K
] and v
v
v
0
= [v
0
1
, ··· , v
0
K
] denote the
sorted objective vectors of length K. Then order rela-
tion
leximax
is defined as: v
v
v
leximax
v
v
v
0
if and only if
∃t, ∀t
0
< t, v
t
0
= v
0
t
0
∧ v
t
> v
0
t
. The minimization of the
objective vectors on leximax improves fairness and
the worst case cost value among the cost values. We
assume that an inherent trade-off between efficiency
(i.e., the total utility/cost value) and fairness is accept-
able, similar to related studies.
In this sub-section, we still use the notations
of state s and action a as those in the previous
sub-section, although the context of states/actions
changed to that of joint states/actions among agents.
We will replace these notations from Section 3. To ap-
ply leximax, the previous study adjusted the learning
and action-selection rules. For simple cases in deter-
ministic environments, the following learning rule is
applied. Here both learning rate α and discount rate γ
are set to 1.
Q
Q
Q(s, a) ← min
leximax
a
0
(c
c
c + Q
Q
Q(s
0
, a
0
)) , (3)
where c
c
c is a cost vector for current action a. The vec-
tors are compared using the leximax criterion. A ma-
jor difference from conventional methods is that cost
vector c
c
c for the current action is aggregated with ex-
pected future cost vectors before minimization. This
modification aims to avoid the confusion of evalu-
ations in future actions (Section 3.2.2 of (Matsui,
2019)). For the modified learning rule, the action se-
lection is also modified to satisfy the following condi-
tion: Q
Q
Q(s
−
, a
−
) = c
c
c
−
+ Q
Q
Q(s, a), where Q
Q
Q(s
−
, a
−
) is a
Q-vector for the previous state and action and Q
Q
Q(s, a)
is a Q-vector for the current state and action. c
c
c
−
is
a cost vector for previous action a
−
. The actions are
filtered by this condition in the current state, and the
best action is selected from the available ones. In the
initial state, the best action is selected only by refer-
ring to the learning table.
ICAART 2023 - 15th International Conference on Agents and Artificial Intelligence
270

For general cases of Equation (3) including non-
deterministic environments, the following learning
rule is applied:
Q
Q
Q(s, a) ← (1−α)Q
Q
Q(s, a)+α min
leximax
a
0
(c
c
c+γ Q
Q
Q(s
0
, a
0
)) .
(4)
In this problem setting that consider the fairness
among the total cost values for individual agents’ ac-
tions in an episode, γ = 1 is preferred to evenly accu-
mulate future action cost values. The action selection
is also modified using an approximation with the lex-
imax operator for the difference between Q
Q
Q(s
−
, a
−
)
and c
c
c
−
+ Q
Q
Q(s, a). For current state s, it selects action
a = argmin
leximax
a
0
((c
c
c
−
+ Q
Q
Q(s, a
0
)) −Q
Q
Q(s
−
, a
−
)) .
(5)
Ties are broken with
a = argmin
leximax
a
0
(c
c
c
−
+ Q
Q
Q(s, a
0
)). (6)
In the previous study (Matsui, 2019), several ex-
perimental investigations were performed in a simple
case where the learning and action phases were sep-
arated. In a learning phase, every joint state-action
pair is repeatedly scanned to propagate the informa-
tion in the learning tables. In an action phase, from
the initial states of the agents, a sequence of the best
actions is selected based on the learning results and
the immediate cost vectors of the current actions un-
til agents reach a goal state. Since the previous study
only addressed the case of joint state-action space that
is learned with a single learning table, therefore, ad-
ditional investigations are necessary toward an exten-
sion to cooperative learning by multiple agents.
2.3 Multiagent Reinforcement Learning
with Cooperative Joint Action
Selection
In general multiagent reinforcement learning, each
agent has its own learning table and cooperatively/-
competitively performs learning. A top-down ap-
proach in multiagent cases is the decomposition and
approximation of a single learning table for joint ac-
tions. In such methods, agents individually learn with
their own tables but cooperatively determine their best
joint actions by solving an optimization problem that
is built by combining the information in decomposed
tables. In related studies (Zhang and Lesser, 2012;
Nguyen et al., 2014), agents cooperatively determine
their best joint action by solving a Distributed Con-
straint Optimization Problem (DCOP) (Fioretto et al.,
2018), which is a class of general combinational opti-
mization problems in decentralized settings.
t
h
0
h
1
h
2
h
3
Hunter
Target
Figure 1: Pursuit problem domain (Matsui, 2019).
As an extended class of DCOPs, the asymmet-
ric multi-objective DCOP has been proposed (Matsui
et al., 2018; Matsui, 2022). In this problem, objec-
tive functions between pairs of agents are asymmet-
rically defined to represent the individual evaluations
of agents. These individual objective functions are
aggregated into the objective values of agents, and
then this multi-objective problem is solved by a de-
centralized solution method using leximin for the op-
timization criterion. As shown in Section 2.2, a pre-
vious multi-objective reinforcement learning (Matsui,
2019) method optimized the joint policies based on
leximax, which is a variant of leximin for minimiza-
tion problems. Therefore, there are opportunities to
decompose this learning process to individual agents
with joint action selection by the leximin (leximax)
based decentralized optimization method. Several
fundamental investigations are necessary on the influ-
ences of the decomposition.
2.4 Pursuit Problem Domain
We employ an example domain of the pursuit prob-
lem presented in a previous study (Matsui, 2019). As
shown in Fig. 1, hunter agents pursuit a target agent
in a torus grid world. An agent can move to one of
the cells adjoining its current location. The two ac-
tions of hunters are to move closer to the targets or
to remain in their current locations. Such simplifica-
tion conserves the action space, and the directions of
the hunter agent moves are deterministically selected
with a fixed tie-break rule. The target moves to max-
imize the minimum distance to the hunters. Depend-
ing on the settings, one of the multiple best actions by
the target is deterministically or non-deterministically
selected. From their initial locations, the agents iter-
ate the observation of states and the selection of ac-
tions. An episode terminates when one hunter and the
target are in the same cell. To eliminate noise, the
observations of agents are complete. Each hunter re-
ceives its individual cost value 1 or 0 for a move or
a stay. In addition, a sufficiently large cost value is
given to all the hunters when all of them stay at their
current location. Without this rule or similar knowl-
A Study Toward Multi-Objective Multiagent Reinforcement Learning Considering Worst Case and Fairness Among Agents
271

edge/signals, all hunters in this problem domain will
simply learn an inappropriate joint action where they
select no move to reduce action costs. The goal of
the problem is to learn the joint policy that reduces
the cost values of hunter agents and improves fairness
and the worst case as possible. In the previous study,
the learning method that employs a single learning ta-
ble containing objective vectors of hunters was per-
formed on a joint-action space for the entire system.
We basically inherit this example problem domain
to analyze our methods. In addition, as mentioned
below, we modified the handling of inhibited joint ac-
tions where no agent moves so that such cases are ex-
cluded from action spaces by an action shaping.
3 LEARNING FAIR POLICIES IN
DECOMPOSED SETTINGS
Toward decentralized solution methods extending the
previous study (Matsui, 2019), we investigate the sit-
uations where each agent owns its learning table and
selects optimum joint actions by combining the de-
composed tables.
3.1 Decomposition of Problems
We decompose the single learning table of joint state-
action spaces Q
Q
Q(s
s
s, a
a
a) to multiple tables Q
i
(s
s
s, a
i
) for
pairs of joint state space and individual action space
of agent i. Here s
s
s ∈ S
S
S and a
a
a ∈
∏
i
A explicitly de-
note joint states and joint actions, and A denotes a
common set of each agent’s actions. We still em-
ploy joint states s
s
s of all agent locations including the
target agent for complete observation. By this mod-
ification, the size of learning table is reduced from
|S
S
S| × |A|
|H|
to |H| × |S
S
S| × |A|, where |H| denotes the
number of hunter agents. Therefore, each agent only
learns the cost values of its own actions. However,
each agent should cooperate with the others to deter-
mine joint actions by a protocol. We focus on this ap-
proximated situation in multi-objective problems with
leximax criterion. In addition, to simplify the learning
process, we remove a large cost value of a joint action
for which all the hunter agents stop and introduce an
action shaping that inhibits all-stop joint action. In
cooperative situations, such an action shaping can be
applied within the decision-making process of joint
actions among agents.
1 (Initialize agents location. Globally synchronized time step
t ← 0.)
2 Initialize its own learning table Q
i
(s
s
s, a
i
).
3 Until goal state do begin
4 Observe current joint state s
s
s
t
including its current.
5 Find the best joint action
ˆ
a
a
a
t
for s
s
s
t
by cooperatively solving
a multi-objective optimization problem based on
learning tables of all the agents.
6 Perform an action referring its own action ˆa
i,t
in the best
joint action
ˆ
a
a
a
t
.
7 Observe new joint state s
s
s
t+1
and receive cost c
i
.
8 Find the best joint action
ˆ
a
a
a
t+1
for the new joint state s
s
s
t+1
by cooperatively solving a multi-objective
optimization problem based on learning tables of all
the agents..
9 Update Q
i
(s
s
s
t
, ˆa
i,t
) using Q
i
(s
s
s
t
, ˆa
i,t
), Q
i
(s
s
s
t+1
, ˆa
i,t+1
) and
cost c
i
.
10 (t ← t +1.)
11 end.
Figure 2: Learning with decomposed learning table and co-
operative problem solving to determine joint action (agent
i).
3.2 Cooperation of Agents by
Optimization of Joint Actions
We assume an approach that resembles previous
work (Zhang and Lesser, 2012; Nguyen et al., 2014)
where agents individually learn with their own tables
but cooperatively determine their best joint actions.
The cooperation problem is translated to a DCOP that
is also commonly represented by a constraint graph,
and the problem is solved using a solution method.
In our case, the relationship among agents is simply
represented as a fully connected constraint graph with
unary function nodes of Q
i
. While the previous stud-
ies addressed single objective problems with the tra-
ditional summation criterion of cost/utility values, we
address a similar approach to multi-objective prob-
lems with a leximax criterion. Although several solu-
tion methods that aggregate individual objective val-
ues with leximin/leximax criterion are available (Mat-
sui et al., 2018; Matsui, 2022), we emulate an exact
solution method in a simulator to simply implement
the first analysis.
The total flow of the learning, including coopera-
tive problem solving for the determination of joint ac-
tions, is shown in Fig. 2. After the initialization (lines
1-2), the agents repeat both their learning and action
processes (lines 3-11). In each iteration, agents first
observe their current joint state s
s
s
t
including the lo-
cations of all the hunter agents and the target agent
(line 4). Then the agents determine their joint action
ˆ
a
a
a
t
in s
s
s
t
(line 5). To compute their best joint action,
agents cooperate to aggregate the information of their
tables and to solve a selection problem for joint ac-
tions. Here the agents solve the following problem
based on Equation (5) in most cases.
ICAART 2023 - 15th International Conference on Agents and Artificial Intelligence
272

ˆ
a
a
a
t
= argmin
leximax
a
a
a∈
∏
i
A
⊕
i
(
(c
i,t−1
+ Q
i
(s
s
s
t
, a
a
a
↓a
i
)) − Q
i
(s
s
s
t−1
, a
i,t−1
))) ,
(7)
where ⊕ is the constructor operator of sorted ob-
jective vectors. a
i,t−1
is the action in the previous
state, and c
i,t−1
is the cost value received in the previ-
ous state. a
a
a
↓a
i
denotes a projection from joint action
a
a
a to an action of agent i. In the initial state, terms of
the previous state are ignored. The problem for other
cases shown in Equation (6) is similarly decomposed
and aggregated. Then each agent i performs an action
a
i,t
, considering its own part ˆa
i,t
of the selected joint
action
ˆ
a
a
a
t
(line 6), observes new joint state s
s
s
t+1
, and
receives its own cost c
i,t
(i.e., negative reward) from
the environment (line 7).
Each agent performs learning with the received
cost value and its own learning table, Since Q-
learning calculates the minimum expected cost value
(vector) for future actions, agents also cooperatively
solve the selection problem of the best joint action
ˆ
a
a
a
t+1
in new state s
s
s
t+1
(line 8). Here the agents solve
the following problem that is a part of Equation (4).
ˆ
a
a
a
t+1
= argmin
leximax
a
a
a∈
∏
i
A
⊕
i
(c
i,t
+ γQ
i
(s
s
s
t+1
, a
a
a
↓a
i
)) (8)
With its own part ˆa
i,t+1
of the selected joint action
ˆ
a
a
a
t+1
, each agent calculates its related cost values and
updates its own learning table (line 9):
Q
i
(s
s
s
t
, a
i,t
) ←
(1 − α) Q
i
(s
s
s
t
, a
i,t
) + α (c
i,t
+ γ Q
i
(s
s
s
t+1
, ˆa
i,t+1
)) .
(9)
In the first part of our experiment, we separately
perform the learning and action phases by decom-
posing the above on-line learning to sufficiently and
evenly scan the state-action space like Bellman-Ford
algorithm instead of Monte Caro method.
3.3 Experimental Analysis Of On-Line
Learning
In the analysis presented in the previous study (Mat-
sui, 2019), a learning phase was separated from an
action phase so that the learning process sufficiently
covers the joint state-action space. We also investigate
the case of on-line learning used in general reinforce-
ment learning.
There are several issues related to the behaviors
of agents that perform the learning in an explore-
and-exploit manner. One is that agents should im-
prove fairness and the worst case among their poli-
cies. Therefore, the discount rate of the reinforcement
learning should ideally be 1 to evenly evaluate the cost
of each action. Agents will be highly affected by the
estimated future costs that contain large errors in the
earlier steps of exploration.
In addition, convergence issues emerge due to
aliasing by decomposed learning tables. We exper-
imentally investigate the influence of the settings in
this class of problems.
4 EVALUATION
4.1 Settings
We experimentally evaluated our proposed approach
on the pursuit problem domain shown in Section 2.4
with deterministic and non-deterministic settings.
While the deterministic target agent selects one of its
best moving directions with a fixed order on the direc-
tions, the non-deterministic target agent randomly se-
lects one of their best moving directions with uniform
distribution. The non-deterministic tie-break on the
best moves causes a small noise and affects the learn-
ing process. All hunter agents always select one of
their best moving directions with a fixed order on the
directions. We set the cutoff iteration of agent moves
in an episode to 500.
We performed two cases of experiments. In the
first, the learning and action selection phases were
separated, similar to the previous study, to learn by
evenly scanning the state-action space like Bellman-
Ford algorithm. In the second experiment, the agents
performed on-line learning by exploring their en-
vironment. Due to the limitation of memory us-
age and computational time to handle multiple and
multi-objective Q-tables with complete observation of
states, we addressed the size of problems up to 5 × 5
and 7 × 7 grids for the off-line and on-line settings.
We employed initial value α
0
of learning rate α
with decay coefficient α
d
multiplied to α at each
episode. Also, we typically employed discount pa-
rameter γ = 1 to accumulate the future action cost
values evenly. In the second case of experiment, we
employed ε-greedy method, and its parameters were
initial value ε
0
of random-walk probability ε and de-
cay coefficient ε
d
multiplied to ε at each episode.
We compared two cases of scalarization/filtering
criteria of summation (sum) and leximax (lxm). In the
case of ‘sum’, the rule in Equation (2) was decom-
posed for the multiple learning tables in the agents
like in the case of lxm. Here weight vector v
v
v of the
summation was an all-one vector. Namely, it was de-
fined as almost equivalent to the traditional summa-
tion of cost values. However, the decomposition of
the summation case is also different from the previ-
ous study that has single tables of joint state-action
A Study Toward Multi-Objective Multiagent Reinforcement Learning Considering Worst Case and Fairness Among Agents
273

Table 1: Moving cost (deterministic, α
0
= 0.5, α
d
= 0.95,
averaged for trials).
alg. 4 × 4 grid 5 × 5 grid
min. ave. max. Theil min. ave. max. Theil
sum 0.1 1.5 3.9 0.666 0.8 2.6 4.9 0.247
lxm 0.6 1.3 2.1 0.180 1.5 2.6 4.4 0.113
Table 2: Moving cost (non-deterministic, α
0
= 0.5, α
d
=
0.95, averaged for trials).
alg. 4 × 4 grid 5 × 5 grid
min. ave. max. Theil min. ave. max. Theil
sum 0.9 3.7 7.8 0.354 4.1 10.1 16.7 0.157
lxm 1.5 2.7 3.9 0.109 3.5 5.3 7.1 0.064
spaces, and will be affected by the decomposition.
Since the value of leximax cannot be directly rep-
resented, we evaluated the results by the average,
minimum, and maximum cost values of the agents’
moves during the episodes. In addition, the Theil
index that is a measurement of inequality is evalu-
ated. For n objectives, Theil index T is defined as
T =
1
n
∑
i
v
i
¯v
log
v
i
¯v
, where v
i
is the utility or the cost
value of an objective, and ¯v is the mean utility value
for all the objectives. When all the objective values
are identical, the Theil index takes minimum value 0.
Due to our problem setting, the Theil index is evalu-
ated for the agents’ moving costs although it is origi-
nally defined for incomes.
4.2 Results: Separated Learning and
Action Selection Phases
We first show the results of experiment where the
learning and action selection phases are separated. In
the learning phase, we scanned the whole joint state-
action space 100 times. We set learning rate α by pre-
liminary experiments, and discount rate γ was set to
1. In the action selection phase after learning, we set
the initial locations of the hunter agents to four cor-
ner cells of a grid world and varied the target’s initial
location except for the goal situations. Note that the
environment was actually a torus world. The results
were averaged for all the initial locations of the target.
In all the experiments with these settings, the agents
completed the episodes within the cut-off iteration of
their moves.
Table 1 shows the learning results of moving cost
in the deterministic cases. Ideally, ‘sum’ should re-
duce the average cost values among the agents, and
lxm should reduce the maximum cost values if there
is no noise. In the actual results, the maximum cost
value and the Theil index value were relatively small
for lxm. On the other hand, there were cases where
0
5
10
15
20
25
0 1 2 3 5
Count
Move cost
Sum
0
5
10
15
20
25
0 1 2 3
Count
Move cost
Lxm
Figure 3: Histogram of moving cost (deterministic, 5 × 5
grid, α
0
= 0.5, α
d
= 0.95, for all trials).
0
50
100
150
0 3 6 9 12151821242730333639435579
Count
Move cost
Sum
0
50
100
150
0 2 4 6 8 10 12 14 16 19 22
Count
Move cost
Lxm
Figure 4: Histogram of moving cost (non-deterministic, 5×
5 grid, α
0
= 0.5, α
d
= 0.95, for all trials).
the average cost value for lxm was also smaller than
that for sum. We found relatively large perturbation in
the learning process and the results even in the deter-
ministic cases. A possible reason is the aliasing sim-
ilar to partial observation due to the decomposition
of the global learning table into those of individual
agents. Our result revealed the necessity of further
studies to improve convergence, although the decay
coefficient to learning rate mitigated the issue.
Table 2 shows the learning results of moving cost
in the non-deterministic cases. While there were
some influence of noise in the target’s actions, the
maximum cost value and the Theil index value were
relatively small for lxm. Figures 3 and 4 show the
histograms of the moving-cost values of the agents
in the experiment. Here the result were accumu-
lated for all the episodes without averaging for each
episode. For lxm in the deterministic settings, agents
moved relatively fairly and the range of the moving-
cost values was rather narrow. The results of the non-
deterministic settings were similar, while there were
several outliers of the maximum moving-cost values
due to noise.
ICAART 2023 - 15th International Conference on Agents and Artificial Intelligence
274
0
0.05
0.1
0.15
0.2
0.25
0
10
20
30
40
50
60
70
1.E+04
1.E+05
2.E+05
3.E+05
4.E+05
5.E+05
6.E+05
6.E+05
7.E+05
8.E+05
9.E+05
1.E+06
Theil
Cost
Episode
min ave
max Theil
Figure 5: Learning curve (deterministic, 7 × 7 grid, α
d
=
0.5, α
0
= 0.999995, γ = 1, ε
0
= 0.5, ε
d
= 0.99999, sum).
0
0.05
0.1
0.15
0.2
0.25
0
10
20
30
40
50
60
70
1.E+04
1.E+05
2.E+05
3.E+05
4.E+05
5.E+05
6.E+05
6.E+05
7.E+05
8.E+05
9.E+05
1.E+06
Theil
Cost
Episode
min ave
max Theil
Figure 6: Learning curve (deterministic, 7 × 7 grid, α
d
=
0.5, α
0
= 0.999995, γ = 1, ε
0
= 0.5, ε
d
= 0.99999, lxm).
0
0.05
0.1
0.15
0.2
0.25
0.3
0
50
100
150
200
1.E+04
1.E+05
2.E+05
3.E+05
4.E+05
5.E+05
6.E+05
6.E+05
7.E+05
8.E+05
9.E+05
1.E+06
Theil
Cost
Episode
min ave
max Theil
Figure 7: Learning curve (non-deterministic, 7 × 7 grid,
α
d
= 0.5, α
0
= 0.999995, γ = 1, ε
0
= 0.5, ε
d
= 0.99999,
sum).
0
0.05
0.1
0.15
0.2
0.25
0.3
0
50
100
150
200
1.E+04
1.E+05
2.E+05
3.E+05
4.E+05
5.E+05
6.E+05
6.E+05
7.E+05
8.E+05
9.E+05
1.E+06
Theil
Cost
Episode
min ave
max Theil
Figure 8: Learning curve (non-deterministic, 7 × 7 grid,
α
d
= 0.5, α
0
= 0.999995, γ = 1, ε
0
= 0.5, ε
d
= 0.99999,
lxm).
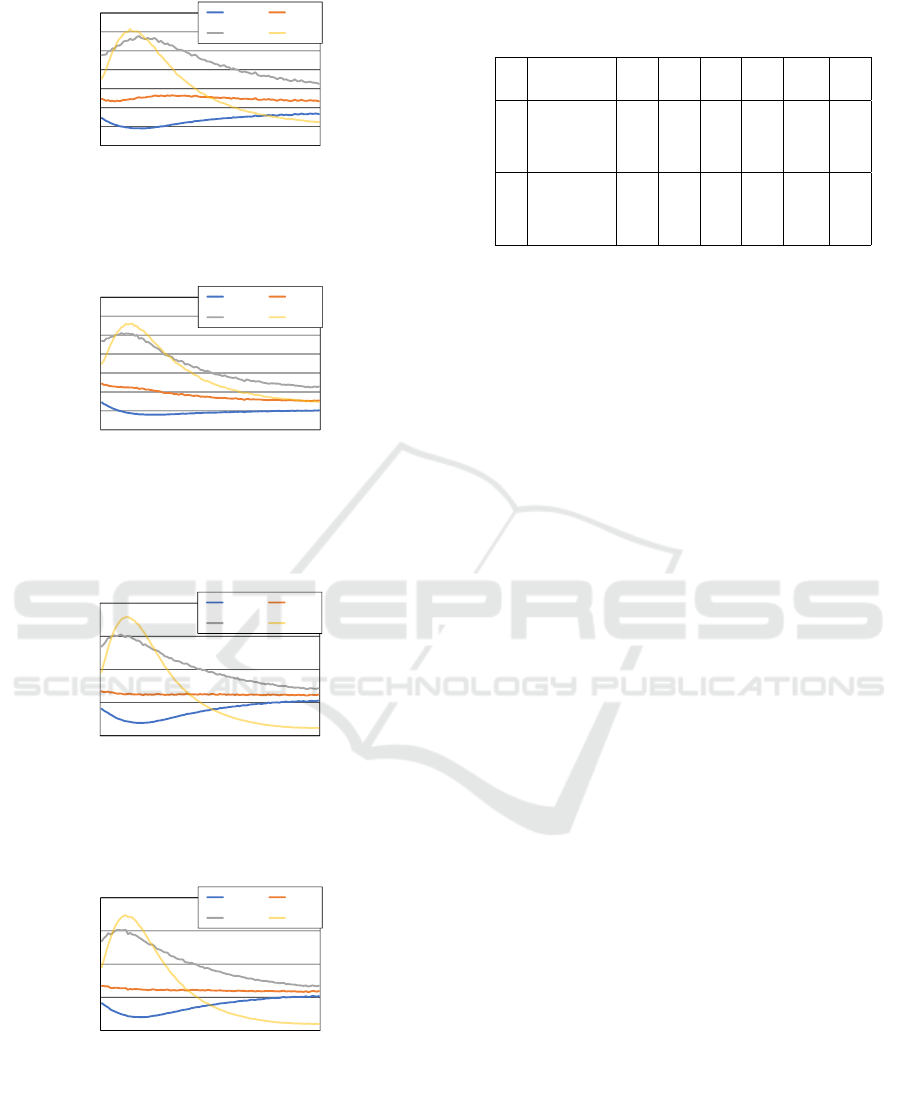
4.3 Results: On-Line Learning
We next show the results of experiment when the
agents performed on-line learning. In this experi-
Table 3: Moving cost averaged for every 100 episodes in
last steps (non-deterministic, non-deterministic, 7 × 7 grid,
α
d
= 0.5, α
0
= 0.999995, γ = 1, ε
0
= 0.5, ε
d
= 0.99999).
alg 100 episodes 9996 9997 9998 9999 10000 ave.
to (×10
2
)
sum min. 56.6 50.2 53.2 49.9 49.7 51.9
ave. 66.7 58.8 61.5 59.2 58.6 61.0
max. 76.6 67.7 70.5 68.1 68.6 70.3
Theil 0.015 0.026 0.017 0.016 0.020 0.019
lxm min. 47.6 50.8 52.5 58.9 46.9 51.4
ave. 55.2 57.7 60.0 66.9 54.0 58.8
max. 63.3 65.3 67.9 75.6 61.2 66.6
Theil 0.017 0.014 0.023 0.014 0.017 0.017
ment, we set the initial locations of the hunter agents
to four corner cells of a 7 × 7 grid world (actually a
torus world) and varied the target’s initial location ex-
cept for the goal situations. With extensive prelimi-
nary experiments, we selected initial learning rate α
0
,
learning decay coefficient α
d
, discount rate γ, initial
random-walk probability ε
0
and decay coefficient ε
d
of ε-greedy method. The cut-off iteration of agents’
moves in an episode was set to 500, and we performed
the experiments until 10
6
episodes.
Figures 5 and 6 show the learning curves of the
cost values in the case of the deterministic settings.
The results plotted in the graphs are average values
for every 1000 episodes. We found that the average
cost values slightly changed from those in the initial
state, while the maximum cost values and the Theil
index values relatively decreased. There were rela-
tively large perturbation in the learning process due
to the decomposed learning tables and the agents’ ex-
ploration. However, in the case of lxm with discount
rate γ = 1 shown in Fig. 6, the maximum (and av-
erage) cost values were relatively smaller than those
of ‘sum’ shown in Fig. 5. In addition, we observed
that the cost values for lxm with γ = 1 were relatively
small in comparison to the cases of γ = 0.5 and 0.75.
It reveals that the correct scale of the estimated future
cost values is important for this problem domain.
Figures 7 and 8 show the learning curves of cost
values in the case of non-deterministic settings. Due
to noise in the problem settings and the exploration,
the results of both methods were similar. However,
for lxm, the maximum cost value and the Theil in-
dex value were slightly smaller than those of ‘sum’
in average among last episodes of the experiment as
shown in Table 3. Here we show average values for
every 100 episodes to emphasize perturbations.
5 DISCUSSION
Our major contribution is the investigation on the pos-
sibility of decomposed learning process including on-
A Study Toward Multi-Objective Multiagent Reinforcement Learning Considering Worst Case and Fairness Among Agents
275

line learning based on the previous approach (Matsui,
2019). For our first investigation, we concentrated on
a case where agents have complete observation of an
environment like in the previous study. On the other
hand, the decomposition of learning tables caused the
aliasing similar to partial observation that affected the
learning process. As a result, a relatively large per-
turbation was caused in the learning process. Since
the solutions of the investigated class of problems re-
quire relatively accurate expected future cost values,
the noise due to the aliasing should be avoided as
much as possible. Mitigation of the influence of the
aliasing and analysis of the allowable range of noise
are a directions of future studies.
To improve the stability of the learning process,
several approaches, including dynamic tuning of the
learning parameters, extending the exploration strate-
gies and filtering the policies, might be effective.
Since the conventional simple aggregation of esti-
mated future cost values mixes different policies,
some analysis of the influence of such an aggrega-
tion is required to improve the learning rules. More-
over, there might be appropriate exploration strategies
to optimize fairness among the agents’ policies.
While we investigated a case of decomposed
learning tables aiming the class of multiagent rein-
forcement learning where agents select their joint ac-
tion by cooperatively solving an optimization prob-
lem, there are different cooperation approaches in-
cluding reward shaping techniques (Agogino and
Tumer, 2004; Devlin et al., 2014). How such tech-
niques including game theoretic approaches can be
applied to our investigated problem will be an inter-
esting issue.
6 CONCLUSION
We investigated the decomposition of multi-objective
reinforcement learning that considers fairness and the
worst case among agents’ action costs toward decen-
tralized multiagent reinforcement learning. Our ex-
perimental results identified the possibility of our pro-
posed approach and revealed the influence of decom-
posed learning tables on the stability of learning. Our
future work will include a detailed and theoretical
analysis of the learning process and improving our
proposed method for more stable learning with dis-
tributed protocols among agents.
ACKNOWLEDGEMENTS
This work was supported in part by JSPS KAKENHI
Grant Number JP22H03647.
REFERENCES
Agogino, A. K. and Tumer, K. (2004). Unifying tempo-
ral and structural credit assignment problems. In the
Third International Joint Conference on Autonomous
Agents and Multiagent Systems, volume 2, pages 980–
987.
Awheda, M. D. and Schwartz, H. M. (2016). Exponen-
tial moving average based multiagent reinforcement
learning algorithms. Artificial Intelligence Review,
45(3):299–332.
Bouveret, S. and Lema
ˆ
ıtre, M. (2009). Computing leximin-
optimal solutions in constraint networks. Artificial In-
telligence, 173(2):343–364.
Devlin, S., Yliniemi, L., Kudenko, D., and Tumer, K.
(2014). Potential-based difference rewards for mul-
tiagent reinforcement learning. In the 13th Interna-
tional Conference on Autonomous Agents and Multia-
gent System, pages 165–172.
Fioretto, F., Pontelli, E., and Yeoh, W. (2018). Distributed
constraint optimization problems and applications: A
survey. Journal of Artificial Intelligence Research,
61:623–698.
Greco, G. and Scarcello, F. (2013). Constraint satisfac-
tion and fair multi-objective optimization problems:
Foundations, complexity, and islands of tractability.
In Proc. 23th International Joint Conference on Arti-
ficial Intelligence, pages 545–551.
Hu, J. and Wellman, M. P. Nash Q-learning for General-
sum Stochastic Games. Journal of Machine Learning
Research.
Hu, Y., Gao, Y., and An, B. (2015). Multiagent reinforce-
ment learning with unshared value functions. IEEE
Transactions on Cybernetics, 45(4):647–662.
Liu, C., Xu, X., and Hu, D. (2015). Multiobjective rein-
forcement learning: A comprehensive overview. IEEE
Transactions on Systems, Man, and Cybernetics: Sys-
tems, 45(3):385–398.
Matsui, T. (2019). A Study of Joint Policies Considering
Bottlenecks and Fairness. In Proc. 11th International
Conference on Agents and Artificial Intelligence, vol-
ume 1, pages 80–90.
Matsui, T. (2022). Study on Applying Decentralized Evo-
lutionary Algorithm to Asymmetric Multi-objective
DCOPs with Fairness and Worst Case. In Proc. 14th
International Conference on Agents and Artificial In-
telligence, volume 1, pages 417–424.
Matsui, T., Matsuo, H., Silaghi, M., Hirayama, K., and
Yokoo, M. (2018). Leximin asymmetric multiple
objective distributed constraint optimization problem.
Computational Intelligence, 34(1):49–84.
Moffaert, K. V., Drugan, M. M., and Now
´
e, A. (2013).
Scalarized multi-objective reinforcement learning:
ICAART 2023 - 15th International Conference on Agents and Artificial Intelligence
276

Novel design techniques. In 2013 IEEE Symposium on
Adaptive Dynamic Programming and Reinforcement
Learning, pages 191–199.
Nguyen, D. T., Yeoh, W., Lau, H. C., Zilberstein, S., and
Zhang, C. (2014). Decentralized multi-agent rein-
forcement learning in average-reward dynamic dcops.
In Proc. 28th AAAI Conference on Artificial Intelli-
gence, pages 1447–1455.
Sutton, R. S. and Barto, A. G. (1998). Reinforcement learn-
ing : an introduction. MIT Press.
Zhang, C. and Lesser, V. (2012). Coordinated multi-agent
learning for decentralized pomdps. In Proc. 7th An-
nual Workshop on Multiagent Sequential Decision
Making Under Uncertainty held in conjunction with
AAMAS.
A Study Toward Multi-Objective Multiagent Reinforcement Learning Considering Worst Case and Fairness Among Agents
277
