
Improving Throughput of Mobile Robots in Narrow Aisles
Simon G. Thomsen
1
, Martin Davidsen
1
, Lakshadeep Naik
2 a
, Avgi Kollakidou
2 b
,
Leon Bodenhagen
2 c
and Norbert Kr
¨
uger
2 d
1
Faculty of Engineering, University of Southern Denmark, Campusvej 55, 5230 Odense M, Denmark
2
SDU Robotics, Maersk Mc-Kinney Mollar Institute (MMMI), Faculty of Engineering, University of Southern Denmark,
Campusvej 55, Odense M, Denmark
Keywords:
Mobile Robotics, Human-Robot-Interaction.
Abstract:
Emergency brakes applied by mobile robots to avoid collision with humans often block the traffic in narrow
hallways. The ability to smoothly navigate in such environments can enable the deployment of robots in shared
spaces with humans such as hospitals, cafeterias and so on. The standard navigation stacks used by these
robots only use spatial information of the environment while planning its motion. In this work, we propose
a predictive approach for handling dynamic objects such as humans. The use of this temporal information
enables a mobile robot to predict collisions early enough and avoid the use of emergency brakes. We validated
our approach in a real-world set-up at a busy university hallway. Our experiments show that the proposed
approach results in fewer stops compared to the standard navigation stack only using spatial information.
1 INTRODUCTION
Today, Autonomous Mobile Robots (AMR) are
widely used for logistic transportation in warehouses
(Allied-Market-Research, 2019). They typically use
a occupancy grid representation of the environment
to localize themselves and navigate by first making a
plan on a global level and then execute this global plan
using a local planner. The global planner uses spatial
heuristics such as shortest distance from point A to B
for computing the path using search algorithms such
as A* (Hart et al., 1968). The local planner uses the
robot kinematic model (such as differential drive) to
predict all possible trajectories for the specified look-
ahead time in the future based on the robot’s costmap
and global plan, and selects the trajectory that doesn’t
involve a collision with any obstacles while trying to
follow the global plan. Local planning is often ac-
complished using algorithms such as Dynamic Win-
dow Approach (DWA) (Fox et al., 1997), Elastic band
planner (R
¨
osmann et al., 2017) or Vector Field His-
togram (VFH) (Borenstein and Koren, 1991).
Motivated by the success of these autonomous
mobile robots in warehouses, many hospitals or
other public institutions are trying to integrate mobile
a
https://orcid.org/0000-0002-2614-8594
b
https://orcid.org/0000-0002-0648-4478
c
https://orcid.org/0000-0002-8083-0770
d
https://orcid.org/0000-0002-3931-116X
robots to perform logistic tasks into their everyday
workflows (Fragapane et al., 2020), for example to
reduce the non-nursing related workload (Yen et al.,
2018). However, the structure as well as dynamics of
these environments is quite different compared to the
warehouse environments. Since robots often have to
navigate through narrow hallways in the vicinity of
humans. This can result in a significant number of
emergency stops during navigation due to simplistic
management of collisions in the standard navigation
stack and can block the traffic in hospital hallways,
which can be costly during emergencies. Because of
that, some hospitals have even abandoned the use of
mobile robots (DR, 2019).
Let’s take the example in Fig. 1 to understand the
problem. In Fig. 1a, we see that the mobile robot
(blue rectangle) is navigating across the hallway by
following its global plan (blue line). A person (2
blue dots and green cost originating from the person’s
legs) starts approaching in opposite direction and we
can see that it will result in a collision if the robot
doesn’t deviate from its global plan. As robot and
person move towards each other, the cost associated
with the person falls within the prediction horizon of
the local planner and it starts to plan a local trajec-
tory that will avoid a collision with the person (see
Fig. 1b). However, before the robot can execute this
planned trajectory, the person is already very close to
the robot and finally the robot just stops in the mid-
Thomsen, S., Davidsen, M., Naik, L., Kollakidou, A., Bodenhagen, L. and Krüger, N.
Improving Throughput of Mobile Robots in Narrow Aisles.
DOI: 10.5220/0011717500003417
In Proceedings of the 18th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2023) - Volume 2: HUCAPP, pages
221-228
ISBN: 978-989-758-634-7; ISSN: 2184-4321
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
221

(a) Person appears in the robots costmap.
(b) Person continue moving towards the robot.
(c) Robot starts to plan local trajectory to avoid collision with the person, but it is too late
and the situation end in an emergency stop.
Figure 1: Handling of interaction with humans in the standard navigation system. Images to the left show the camera feed
from the system; images to the right show visualized data from the system. The robot (blue rectangle) is following the global
path (blue line). Green pixels indicate obstacles, while grey pixels indicate free space.
dle of the hallway to avoid a collision. One simple
solution for this is to increase the look-ahead time of
the local planner, however, this is computationally ex-
pensive as local planners are required to run at a very
high frequency.
Recent improvements in deep learning have sig-
nificantly improved the perception capabilities of the
robots to detect and track humans etc. (Toshev and
Szegedy, 2014; Mehta et al., 2017; Juel et al., 2020).
This has made it possible to consider costs based on
the context such as social groups to enable human-
friendly trajectories (Charalampous et al., 2017; Kol-
lakidou et al., 2021). However, in addition to this
contextual information, humans also use temporal in-
formation while making navigation decisions such as
how fast and in which direction someone is moving.
Inspired by this navigation behaviour of humans, we
implement a predictive way of handling dynamic ob-
jects and avoiding collisions. We show that by pre-
dicting the future trajectories of humans, we can re-
duce the number of times the robot has to stop in sit-
uations with high person densities and thus improve
the throughput of mobile robots in narrow aisles.
2 RELATED WORK
In this section, we describe related work in human
pose estimation, human motion prediction, predictive
navigation and then summarize our contribution.
Human Pose Estimation and Tracking: Data-
driven approaches (Wang et al., 2021) such as Open-
Pose (Cao et al., 2017) have made it possible to accu-
rately track the different human joints in real-time on
low-cost hardware. This has resulted in several new
possibilities for robots such as task learning (Zimmer-
mann et al., 2018), socially aware navigation (Yang
et al., 2019) etc. Further, Juel et al. (Juel et al.,
2020) have shown that these data-driven methods can
be used in combination with probabilistic tracking
HUCAPP 2023 - 7th International Conference on Human Computer Interaction Theory and Applications
222

frameworks such as Kalman filter to track the 3D pose
of the humans for use on mobile robots.
Human Motion Prediction for Robot Navigation:
(Helbing and Molnar, 1995) have proposed a social
force model for predicting human motion. Some
other works have used well-engineered features re-
lated to humans or environments to learn the human
motion using techniques such as inverse reinforce-
ment learning (Henry et al., 2010), inverse optimal
control (Kitani et al., 2012) etc. Recent works (Alahi
et al., 2014; Alahi et al., 2016; Chen et al., 2019)
have used experiences to learn and predict human mo-
tion. These are early recognition approaches, i.e. they
monitor the motion for some time and then predict the
object trajectory.
Predictive Navigation: (Chung and Huang, 2011)
have proposed A* predictive motion planner to incor-
porate human motion while planning navigation us-
ing Dynamic Bayesian Networks. Thompson et al.
(Thompson et al., 2009) have also presented a similar
probabilistic motion model. (Unhelkar et al., 2015)
have used anticipatory indicators of human motion to
plan the robot’s motion. Recent work by (Chen et al.,
2019) have directly tried to learn to avoid collision
with humans during navigation using an end to end
approach.
In this work, our focus is to improve the com-
monly used ROS navigation stack (Guimar
˜
aes et al.,
2016) by reducing the number of emergency robot
stops in narrow aisles. As shown by Helbind et al.
(Helbing and Molnar, 1995), humans often tend to
walk in hallways on the left or right lane. Thus, in-
stead of using complex motion models for predicting
human motion, we rely on real-time human pose es-
timators and use the tracking by detection paradigm
similar to Juel et al. (Juel et al., 2020) to track and pre-
dict human motion using probabilistic Kalman filter.
We also show that associating information from the
robot’s LiDAR and camera results in better tracking
performance. Instead of directly planning the robot
motion on the human motion (Chen et al., 2019; Un-
helkar et al., 2015; Thompson et al., 2009), we exploit
predictions based on a Kalman filter that enable the
robot to modigy its local plan early enough enabling a
smooth robot motion in the vicinity of humans and re-
ducing the number of unintended stops. Our solution
can easily be integrated with the standard navigation
stacks (Guimar
˜
aes et al., 2016) used by many mobile
robots today.
Camera Detector
Tracker
Costmap Editor
Robot laser
Collision Checker
Robot Trajectroy Estimator
Robot path
Robot Navigation
Transform
Laser Fusion
Figure 2: System overview - components colored in blue
are part of the mobile robot navigation stack, components
colored in red are introduced in the proposed solution.
3 METHODOLOGY
Fig. 2 depicts an overview of our system. The De-
tector finds a human h and its corresponding 3D co-
ordinates from camera data in frame k. The 3D po-
sition of the human in the camera frame is indicated
as p
h
(k). These 3D coordinates are then transformed
(see Transform) into the map frame as ˜p
h
(k) and then
merged with the laser data for stabilization purposes,
creating a 3D position p
∗
h
(k) in the map frame.
The Tracker associates 3D detections across the
image sequence arriving at tracks ˆp
id
(k) where id
indicates the same person across time. Hereafter,
the prediction of the to be expected trajectory of the
tracked human T
id
(k) is computed and is passed to
the Collision Checker.
These tracks need to be compared with the trajec-
tory of the robot T
r
(k). The collision checking is then
performed to check for possible intersections ˆc
id
(k)
between the robot’s trajectory and the predicted tra-
jectory of each human.
The Costmap Editor manipulates the costmap
ˆ
C
id
(k) to allow for the robot to navigate taking the
predicted positions of humans into account. In the
following subsections, we describe these components
in detail.
Improving Throughput of Mobile Robots in Narrow Aisles
223
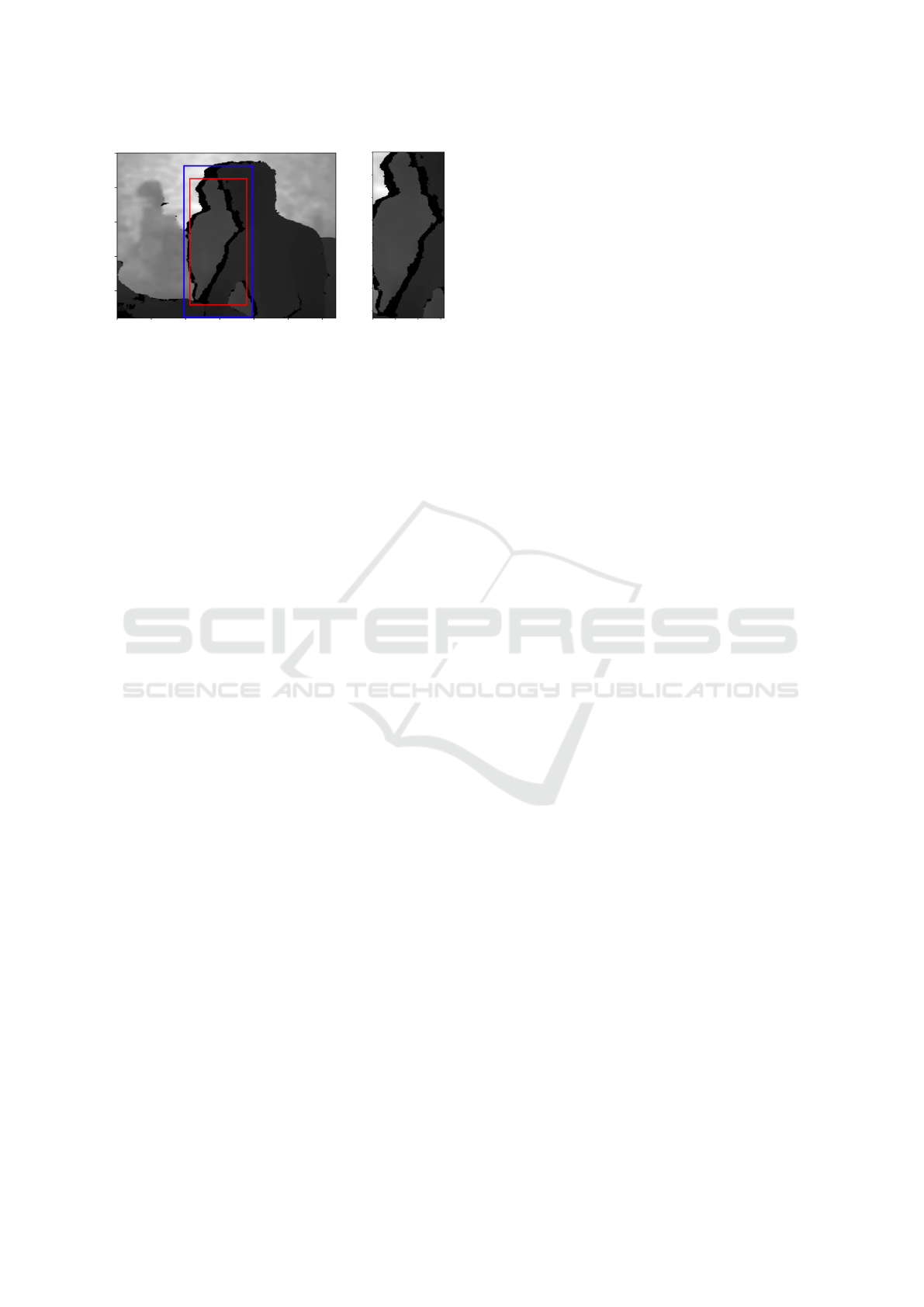
(a) (b)
Figure 3: A) shows a captured depth image with the bound-
ing box (blue) for the detected human and the downscaled
bounding box (red). b) shows the cropped image used for
human position estimation.
3.1 Human Detection
Human detection involves the computation of 2D
pixel coordinates p
2,h
(k) for different humans h for
the k-th image and transforming the respective 3D po-
sitions ˜p
h
(k) to the map frame.
We use CenterNet (Zhou et al., 2019) for human
detection. The output from image k is the center of the
detected human p
2,h
(k) and a corresponding bound-
ing box S
h
(k). To distinguish between robot move-
ment and human movement, the center is transformed
to the robot’s map frame. This transformation is per-
formed as follows: First, the distance d
h
(k) to hu-
man h is obtained through the depth image. Next, the
bounding box estimate S
h
(k) is used to crop the depth
image to fit the object of interest. To further ensure
that mainly the desired object is captured, the size of
the bounding box is reduced by 20% as seen in Fig.
3a. The resulting depth information can be seen in
Fig. 3b.
In Fig. 3 it can be seen that humans may be oc-
cluded and that multiple areas of the image could cor-
respond to the human in question. We apply K-means
clustering on the bounding box to determine the most
likely distance d
h
(k) of the human to the camera from
the cropped depth image by identifying the largest
cluster.
This distance is then used to project the 2D center
pixel coordinate, p
2,h
(k) into the 3D coordinate p
h
(k).
This is done by finding the unit vector passing through
the camera center to the pixel coordinate and extend-
ing the vector with the found distance. Finally, the
transformation between the coordinate frames is used
to convert the 3D position to the map frame ( ˜p
h
(k)).
When the robot moves, the variance of the esti-
mated human position increases due to the limited
frame rate of the camera and the rolling shutter of
the RGB sensor. Furthermore, under rotational move-
ment, static objects are erroneously tracked as mov-
ing, due to a communication delay between camera
and robot. This makes it necessary to improve the
estimate of the positions as done in the following sec-
tion.
3.2 Camera and Laser Sensor Fusion
Since the laser sensor of the robot is much more pre-
cise than the 3D positions ˜p
h
(k) computed from the
camera, we perform fusion of the laser and camera
data and arrive at improved estimates p
∗
h
(k).
A fusion algorithm is implemented based on creat-
ing a K-dimensional tree of the laser scan point cloud
z(k) for efficient nearest neighbor range searches. The
search point used is the human detection ˜p
h
(k) result
in associated points z
h
(k). The impact of the fusion
algorithm can be seen in Fig. 4.
The centroid of the associated laser data z
h
(k) pro-
vides an estimate of the position of the human ¯z
h
(k).
The centroid is given by the mean of associated laser
scan points. This is then fused with the human detec-
tion with bias λ to give different weights to the human
detection ˜p
h
(k) and the centroid ¯z
h
(k). The resulting
estimated human position p
∗
h
(k) is given by (1).
p
∗
h
(k) = λ ¯z
h
(k) + (1 − λ) ˜p
h
(k) (1)
where we used λ = 0.3.
3.3 Human Tracking
The information computed in section 3.2 is still for
a single frame. In this subsection, we connect these
individual estimates to tracks across different image
frames in which the human track position is repre-
sented by ˆp
id
(k) for a given track id at time k. From
this, we can compute the velocity and perform predic-
tions about the future state of the human (as done in
section 3.4).
Data Association. To be able to use velocity in-
formation of humans, the DeepSORT (Wojke et al.,
2017) object tracker is used. We use the Kalman fil-
ter and the Hungarian method (Kuhn, 1955) with an
association metric for frame-by-frame data associa-
tion that combine both motion and appearance infor-
mation. The original DeepSORT algorithm, tracks in
the image plane, which only provides 2D information
about found objects. Hence the tracker is modified to
track in the 3D map frame according to (Juel et al.,
2020).
The Kalman filter model is chosen according to
the dynamics of humans. Here a constant velocity
Kalman filter is used, which thereof assumes nearly
constant velocity.
HUCAPP 2023 - 7th International Conference on Human Computer Interaction Theory and Applications
224

Figure 4: Camera and laser data fusion for improved human
pose estimation. The laser data points (red points), the raw
measurement ˜p
h
(k) from the human detection (purple), the
measurement from the fused estimate p
∗
h
(k) (green) and the
resulting track influenced by the Kalman filter ˆp
id
(k) (blue).
The motion information from the Kalman filter
is incorporated by calculating the squared Maha-
lanobis distance between measurements and predicted
Kalman states of tracks. However, the squared Maha-
lanobis distance favors tracks with larger uncertain-
ties. Therefore, a matching cascade that matches the
detections and tracks is set up to prioritize tracks with
smaller ages.
The appearance information is implemented by
computing an appearance descriptor for each bound-
ing box. The last descriptors are then stored in a
gallery for each track. The smallest cosine distance
between track and detection appearances is finally
computed. The resulting track ˆp
id
(k) and improve-
ment hereof can be seen in Fig. 4.
Track Maintenance. To handle incoming, persistent
and outgoing humans with respect to the field of view
of the camera, track maintenance is required. Tracks
are initiated for each detection that cannot be associ-
ated with an existing track and are classified as tenta-
tive. Tentative tracks are expected to have a success-
ful measurement to track association for n consecutive
frames to be classified as confirmed tracks. If no asso-
ciation occurs or the track age reaches the set max-age
the track is deleted.
3.4 Predicting Object Trajectories
To be able to predict potential collisions, as done in
Section 3.5, the future position of the human needs to
be computed. For that, we predict the likely trajectory
T
id
(k) of the tracked human ˆp
id
(k) up to five seconds
ahead from the current state of the track.
The Kalman filter can create multiple predictions,
from the current state and covariance for each tracked
human. A range of timestamps is defined and used
for prediction, which thereby results in a trajectory
prediction for each track.
T
id
(k) = { ˆp
id
(k+0|k), ˆp
id
(k+0.5|k),..., ˆp
id
(k+5|k)}
(2)
where ˆp
id
(k + i|k) is the predicted position of track id
id at time k + i based on current state k computed for
every half second up to 5 seconds in the future.
3.5 Collision Detection
To modify the costmap, as done in Section 3.6, a pre-
dictive collision system is necessary. Based on the
predicted path T
id
(k), we can compute whether colli-
sions occur on the planned path of the robot. A colli-
sion ˆc
id
(k) occurs when the human trajectory T
id
(k)
intersect the robot trajectory T
r
(k) at the approximate
same location and time.
As standard, the robot only provides a path, which
doesn’t contain time information. Therefore, a tra-
jectory must be computed before the collision check-
ing can be performed. The acceleration of the robot
varies during the execution making the exact trajec-
tory unknown. Instead, an approximation is used as
the robot shares information about its desired veloc-
ity. The approximate velocity throughout the path is
then estimated to be the mean of the current velocity
and desired velocity.
Collision checking is performed by checking if
the Euclidean distance between any point from the
predicted trajectories of tracks T
id
(k) and any point
along the trajectory of the robot T
r
(k) is within a de-
fined distance threshold and at a time difference lower
than the set time threshold. If both constraints are ac-
cepted, a possible collision ˆc
id
(k) is found.
3.6 Costmap Editor
Based on the predictions of the human, the costmap is
modified to take the changed dynamic situation into
account: Given the estimated position ˆp
id
(k), we de-
fine a circle around ˆc
id
(k) with radius r marking the
potential collision and by that increasing the respec-
tive costs in the cost map to avoid that the robot is
planning a path through that area.
Further, we perform a nearest neighbour range
search on the estimated position ˆp
id
(k) from which
the human has moved away decreasing the costs in
the costmap in that respective area in a certain radius
r.
Currently, when the robot computes a new global
path, it uses the combination of the local and global
costmap containing recorded laser data where found
obstacles are inflated for safer maneuvering. Hence
a sub-optimal plan is often the result in a dynamic
Improving Throughput of Mobile Robots in Narrow Aisles
225

environment. The costmap editing is performed to re-
move the laser data for humans which are tracked and
by that the planner is able to plan based on what is to
be expected and not the originally recorded situation,
allowing the robot to generate a more optimal path.
The improvement of the proposed system can be seen
in Fig. 5.
For stationary or intersecting humans, the robot
has information of the potential collisions from the
collision detection described in Section 3.5. Further-
more, in the event of imprecise tracking or other pos-
sible failures, the original collision checking system
is still based on the unmodified laser data and applied
to ensure safe operation. As a consequence, the robot
would drive around the person in due time in each of
these cases.
4 EXPERIMENTAL EVALUATION
Experimental Set-Up. To validate the performance
of the proposed system over the original system, both
systems are tested using the setup illustrated on Fig.
6. An external camera counting the people walking
through the area operates at a rate of 0.5Hz.
The mission of the robot was to repeatedly drive
between two points placed 24 m apart at the side of
the aisle (see Fig. 6). The testing period expands over
4 days, consisting of one early and one late time slot,
both within the peak time at around 12pm, with a du-
ration of 20 min. The peak time was chosen as ex-
periments showed that people tend to avoid the robot
in light densities, with such margin that the system
would have too little influence to indicate a different
behavior. Throughout the test period, the robot was
equipped with either the original system without pre-
dicting collisions or the proposed system for the early
time slot and the other system for the late time slot.
Each day the system order was flipped. The people
walking in the aisle are not aware of the purpose of
the test and are assumed to be unbiased towards the
performance of the robot.
Results. The collected metrics to be compared (see
table 1) are the number of stops, the average number
of stops per run, average duration timed per run, the
average velocity computed per run, the average pop-
ulation size per min and the average number of stops
per person in the aisle. One run hereby means from
point A to B or vice versa. The average number of
stops per person in the aisle will give a comparable
metric as the average population size and the num-
ber of stops are correlated. Hence this will take the
population size difference at different runs out of the
equation.
Table 1: Collected data from 4 days of testing using the
original and the proposed system.
Day 1 Day 2 Day 3 Day 4 Overall
Number of stops
Original 19 10 5 8 42
Proposed 7 10 6 12 35
Average stops per run
Original 0.73 0.39 0.19 0.29 0.39
Proposed 0.30 0.39 0.25 0.44 0.35
Average duration per run [s]
Original 43.65 42.27 40.22 39.67 41.45
Proposed 41.30 42.06 41.29 42.73 41.88
Average velocity [m/s]
Original 0.58 0.59 0.61 0.60 0.60
Proposed 0.59 0.59 0.60 0.58 0.59
Average population size per min
Original 9.85 8.5 5 11.55 8.73
Proposed 12.4 9.75 11.95 11.3 11.35
To avoid repeatedly counting stops, a stop has
been defined as follows. The distance from the robot
to the goal has to be bigger than 1 m to avoid counting
natural stops when turning. Furthermore, two thresh-
olds are used to ensure that the robot starts moving
again before counting a new stop. Hence the robot has
to reach the upper threshold of 0.3 m/s and then slow
down under the lower threshold of 0.05 m/s. The ac-
complishment of reaching a threshold will be reset
for each run. The lower threshold is not set to 0 m/s
because of practical reasons such as the risk of not
counting a stop, as the published velocity never sta-
bilizes at exactly 0 m/s. The results from the testing
can be seen on Table 1.
The results show an increase in performance with
regards to the number of stops and an average number
of stops per run (first two rows in table 1). The num-
ber of stops decreased with 17% although our system
in average has dealt with more difficult situations (i.e.,
a higher average population).
Table 1 also shows a very slight decrease in the
overall performance of the average duration per run
and average velocity (third and fourth row). Practi-
cally, avoiding a stop should help increase the perfor-
mance of these metrics. A possible reason for this
is the addition of the collision system combined with
the behavior of the navigation stack of the MiR robot:
When the robot is in the proximity area of an obstacle,
the navigation stack will automatically slow down the
robot for safer maneuvering. Hence the probabilistic
collision checking can cause slowing down for colli-
HUCAPP 2023 - 7th International Conference on Human Computer Interaction Theory and Applications
226

(a) Before generated path.
(b) After generated path.
(c) Following the path.
Figure 5: A) The environment before the robot generates a path. Person p
1
is directly in front and moving away from the
robot, while person p
2
is moving towards the robot. Note that at that point no reliable trajectories for the movement of the
two persons has been computed yet. b) The generated global path by the robot, which goes directly through p
1
. c) The robot
is following the computed path because it has taken into account that person p
1
has moved and hence it is possible to continue
without colliding with p
1
.
Figure 6: The test setup: The purple area represent the field
of view of the camera for people counting; the dashed line
suggest a possible path for the robot from start to end point.
sions that are not going to happen, making it a possi-
ble side effect of the proposed system.
5 CONCLUSIONS
In this work, we have investigated the problem of
emergency stops applied by mobile robots while nav-
igating in narrow aisles in the vicinity of the humans.
We therefore proposed a predictive navigation ap-
proach that predicts the collision with humans early
enough to adapt the trajectory and to avoid the use
of emergency brakes. Our results indicate a reduc-
tion of the number of stops compared to the standard
navigation stack. However, more testing needs to be
performed to further substantiate the results as well
as more development work to achieve a smoother in-
tegration of our approach in the MiR softare architec-
ture.
ACKNOWLEDGEMENTS
This work is supported by the Innovation Fund Den-
mark for the project DIREC (9142-00001B).
REFERENCES
Alahi, A., Goel, K., Ramanathan, V., Robicquet, A., Fei-
Fei, L., and Savarese, S. (2016). Social lstm: Human
trajectory prediction in crowded spaces. In IEEE con-
ference on computer vision and pattern recognition,
pages 961–971.
Improving Throughput of Mobile Robots in Narrow Aisles
227

Alahi, A., Ramanathan, V., and Fei-Fei, L. (2014). Socially-
aware large-scale crowd forecasting. In IEEE Con-
ference on Computer Vision and Pattern Recognition,
pages 2203–2210.
Allied-Market-Research (2019). Mobile logistic robot -
market size and industry.
Borenstein, J. and Koren, Y. (1991). The vector field
histogram-fast obstacle avoidance for mobile robots.
IEEE Transactions on Robotics and Automation,
7(3):278–288.
Cao, Z., Simon, T., Wei, S.-E., and Sheikh, Y. (2017). Real-
time multi-person 2d pose estimation using part affin-
ity fields. In IEEE conference on computer vision and
pattern recognition, pages 7291–7299.
Charalampous, K., Kostavelis, I., and Gasteratos, A. (2017).
Recent trends in social aware robot navigation: A sur-
vey. Robotics and Autonomous Systems, 93:85–104.
Chen, C., Liu, Y., Kreiss, S., and Alahi, A. (2019). Crowd-
robot interaction: Crowd-aware robot navigation with
attention-based deep reinforcement learning. In In-
ternational Conference on Robotics and Automation,
pages 6015–6022. IEEE.
Chung, S.-Y. and Huang, H.-P. (2011). Predictive naviga-
tion by understanding human motion patterns. In-
ternational Journal of Advanced Robotic Systems,
8(1):3.
DR (2019). Hospital sætter robotter for millioner i garagen:
Kunne ikke færdes blandt mennesker.
Fox, D., Burgard, W., and Thrun, S. (1997). The dy-
namic window approach to collision avoidance. IEEE
Robotics & Automation Magazine, 4(1):23–33.
Fragapane, G., Hvolby, H.-H., Sgarbossa, F., and Strandha-
gen, J. O. (2020). Autonomous mobile robots in hos-
pital logistics. In IFIP International Conference on
Advances in Production Management Systems, pages
672–679. Springer.
Guimar
˜
aes, R. L., Oliveira, A. S. d., Fabro, J. A., Becker, T.,
and Brenner, V. A. (2016). Ros navigation: Concepts
and tutorial. In Robot Operating System (ROS), pages
121–160. Springer.
Hart, P. E., Nilsson, N. J., and Raphael, B. (1968). A for-
mal basis for the heuristic determination of minimum
cost paths. IEEE transactions on Systems Science and
Cybernetics, 4(2):100–107.
Helbing, D. and Molnar, P. (1995). Social force model for
pedestrian dynamics. Physical review E, 51(5):4282.
Henry, P., Vollmer, C., Ferris, B., and Fox, D. (2010).
Learning to navigate through crowded environments.
In IEEE International Conference on Robotics and
Automation, pages 981–986. IEEE.
Juel, W. K., Haarslev, F., Kr
¨
uger, N., and Bodenhagen, L.
(2020). An integrated object detection and tracking
framework for mobile robots. In International Con-
ference on Informatics in Control, Automation and
Robotics, pages 513–520. SCITEPRESS Digital Li-
brary.
Kitani, K. M., Ziebart, B. D., Bagnell, J. A., and Hebert, M.
(2012). Activity forecasting. In European conference
on computer vision, pages 201–214. Springer.
Kollakidou, A., Naik, L., Palinko, O., and Bodenhagen, L.
(2021). Enabling robots to adhere to social norms by
detecting f-formations. In IEEE International Confer-
ence on Robot & Human Interactive Communication,
pages 110–116. IEEE.
Kuhn, H. W. (1955). The hungarian method for the assign-
ment problem. Naval Research Logistics Quarterly,
2(1-2):83–97.
Mehta, D., Sridhar, S., Sotnychenko, O., Rhodin, H.,
Shafiei, M., Seidel, H.-P., Xu, W., Casas, D., and
Theobalt, C. (2017). VNect: Real-time 3D human
pose estimation with a single RGB camera. ACM
Transactions on Graphics (TOG), 36(4):1–14.
R
¨
osmann, C., Hoffmann, F., and Bertram, T. (2017). Kino-
dynamic trajectory optimization and control for car-
like robots. In IEEE/RSJ International Conference
on Intelligent Robots and Systems, pages 5681–5686.
IEEE.
Thompson, S., Horiuchi, T., and Kagami, S. (2009). A
probabilistic model of human motion and navigation
intent for mobile robot path planning. In International
Conference on Autonomous Robots and Agents, pages
663–668. IEEE.
Toshev, A. and Szegedy, C. (2014). Deeppose: Human pose
estimation via deep neural networks. In IEEE con-
ference on computer vision and pattern recognition,
pages 1653–1660.
Unhelkar, V. V., P
´
erez-D’Arpino, C., Stirling, L., and Shah,
J. A. (2015). Human-robot co-navigation using an-
ticipatory indicators of human walking motion. In
IEEE International Conference on Robotics and Au-
tomation, pages 6183–6190. IEEE.
Wang, J., Tan, S., Zhen, X., Xu, S., Zheng, F., He, Z., and
Shao, L. (2021). Deep 3d human pose estimation: A
review. Computer Vision and Image Understanding,
210:103225.
Wojke, N., Bewley, A., and Paulus, D. (2017). Simple on-
line and realtime tracking with a deep association met-
ric.
Yang, C.-T., Zhang, T., Chen, L.-P., and Fu, L.-C. (2019).
Socially-aware navigation of omnidirectional mobile
robot with extended social force model in multi-
human environment. In IEEE International Confer-
ence on Systems, Man and Cybernetics, pages 1963–
1968. IEEE.
Yen, P.-Y., Kellye, M., Lopetegui, M., Saha, A., Loversidge,
J., Chipps, E. M., Gallagher-Ford, L., and Buck, J.
(2018). Nurses’ time allocation and multitasking of
nursing activities: a time motion study. In AMIA An-
nual Symposium, volume 2018, page 1137. American
Medical Informatics Association.
Zhou, X., Wang, D., and Kr
¨
ahenb
¨
uhl, P. (2019). Objects as
points.
Zimmermann, C., Welschehold, T., Dornhege, C., Burgard,
W., and Brox, T. (2018). 3D human pose estimation in
RGBD images for robotic task learning. In IEEE In-
ternational Conference on Robotics and Automation,
pages 1986–1992. IEEE.
HUCAPP 2023 - 7th International Conference on Human Computer Interaction Theory and Applications
228
