
Spatial Positions of Operator’s Finger and Operation Device Influencing
Sense of Direct Manipulation and Operation Performance
Kazuhisa Miwa
1
, Hojun Choi
1
, Mizuki Hirata
1
and Tomomi Shimizu
2
1
Graduate School of Informatics, Nagoya University, Nagoya, 4648601, Japan
2
Advanced Development Div., Tokai Rika Co., Ltd., Toyota, Oguchi-cho, Niwa-gun, Aichi, 4800195, Japan
Keywords:
Indirect Manipulation, Interface, Sense of Agency.
Abstract:
When operating an interface using an input device (such as a mouse or trackpad,) one’s fingers (referred to
as the “Operating Subject”), indirectly operate a target device through a pointer displayed on the interface
(referred to as the “Operation Media”). Our experiment investigated the effects of the spatial positions of
the Operating Subject and Operation Media on the sense of direct manipulation and operation performance.
The results showed that the sense of direct manipulation increased when the Operation Media was placed
diagonally toward the left than on the front, and the operation performance was higher when the Operating
Subject was placed on the right side of the body than on the front (for right-handed individuals).
1 INTRODUCTION
1.1 User Representation
When operating an interface using an input device
(such as a mouse or trackpad), one’s hands or fingers
[hereafter referred to as “Operating Subject” (OS)]
indirectly operate a target device, such as a naviga-
tion system in an automobile or an operation panel
of an in-car device, through a pointer displayed on
the interface [hereafter referred to as “Operation Me-
dia” (OM)]. Figure 1 shows the relationship among
the OS, OM, and manipulated target device.
Figure 1: Relationship among the finger as an operating
subject, a pointer as an operation media, and the target de-
vice for operation.
Manipulating the target device through such an
OM is in contrast to manipulating a device like a
tablet, which are manipulated by directly touching the
device.
The OM acts as a substitute for our own bodies. In
indirect manipulation, we use this substitute to touch
and interact with the target device. This substitute is
called “user representation,” and various types of in-
direct operations have been discussed (Seinfeld et al.,
2021). Seinfeld et al. called the space that the OS
touches the “input space,” and the space that the OM
touches the “output space.” The output space is the
operating surface or interface of the target device that
is manipulated by the operator.
The concept of user representation is applied to
understanding interactions with various artifacts. The
example discussed at the beginning of this study was
an arrow-shaped mouse’s cursor on a desktop; how-
ever, for on-screen avatars (Marcos et al., 2010), body
parts such as arms displayed in a VR space (Rautaray
and Agrawal, 2015), robots, and even drones can be
included as examples of user representation.
1.2 Tacit Knowledge
In considering the issue of indirect manipulation, it
is useful to refer to the concept of tacit knowledge as
described by Polanyi (Polanyi, 1958).
Generally, tacit knowledge is defined as the
knowledge that is used empirically but cannot be ex-
plained in words. Tacit knowledge is typically related
to physical actions. Consider, for example, riding a
bicycle, which requires the integrated coordination of
Miwa, K., Choi, H., Hirata, M. and Shimizu, T.
Spatial Positions of Operator’s Finger and Operation Device Influencing Sense of Direct Manipulation and Operation Performance.
DOI: 10.5220/0011724500003417
In Proceedings of the 18th Inter national Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2023) - Volume 2: HUCAPP, pages
229-235
ISBN: 978-989-758-634-7; ISSN: 2184-4321
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
229
multiple muscles. However, upon acquiring this phys-
ical knowledge, one can perform it unconsciously and
without any difficulties. Moreover, once one learns
how to ride, one never forgets. A characteristic of
tacit knowledge is that it is difficult to verbalize, de-
spite being easily operationalized. It is almost impos-
sible to explain verbally and teach others how to ride
a bicycle.
One of the most important concepts in tacit knowl-
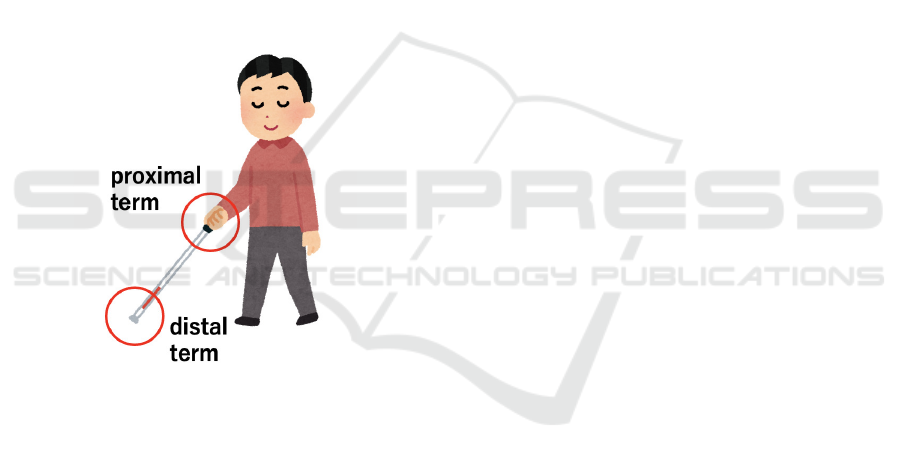
edge is the proximal and distal terms.
For instance, while walking down a street with a
cane (see Figure 2), if an obstacle hits the tip of the
cane, vibration is transmitted to the palm of the hand
that is holding it. The vibration felt by the hand is
the proximal term and the feeling of detecting the ob-
stacle at the end of the cane is the distal term. We
sense the vibration of the hand as the proximal term,
but what we perceive is the obstacle at the end of the
cane. We do not know the vibration, but we know that
there is an obstacle.
Figure 2: Proximal and distal terms.
In tacit knowledge, this phenomenon is referred to
as the tacitization of the proximal term or the forma-
tion of perceptions of the distal term using the proxi-
mal term as a cue.
It is reasonable to say that the solution to various
issues in indirect manipulation can be summed up as
the formation of tacit knowledge, as described so far.
In indirect manipulation, the proximal term emerges
in the operating space that the OS directly touches
(the input space), and the distal term emerges in the
space that the OM touches (the output space), such as
the operating surface and the interface of the operat-
ing device.
If the proximal term is not tacitly known, it is im-
possible to obtain a good operating experience. The
key to improving the experience of direct operation is
to make the proximal term tacitly known and form an
awareness of the distal term.
1.3 Sense of Agency
In direct manipulation, the body touches the target de-
vice directly. In contrast, in indirect manipulation, the
target device is manipulated through an OM. One of
the problems that can occur with indirect manipula-
tion in such a situation is the separation of the OS and
OM. In this case, the OM is manipulated, instead of
the target device; the manipulated OM interacts with
the target device. In this case, the sense of directly
manipulating the target device, that is, the direct ma-
nipulation sensation, is missing.
An important concept related to the sense of direct
manipulation is the “sense of agency” (SoA), which is
the feeling that one is the operating principal of a cer-
tain movement, controls the target, and feels respon-
sible for the result of the movement (Limerick et al.,
2014; Moore, 2016). In this study, SoA was used as
an evaluation index for a good sense of operation in
indirect manipulation.
SoA measurement can be divided into two meth-
ods: subjective methods rated by the operator, and
objective methods. For the former, answering ques-
tions “How much your actions caused that event?”
(Sato and Yasuda, 2005; Aarts et al., 2006) and “How
much control you had over the actions?” (Kalckert
and Ehrsson, 2012; Braun et al., 2014) in a question-
naire is the gold standard method. For the latter, a
method to measure the degree of Intentional Binding
using an interface called the Libet Clock is often used
(Haggard et al., 2002; Limerick et al., 2014). A high
SoA score indicates that the proximal term is known
tacitly.
1.4 Spatial Relation Between OS and
OM
In indirect manipulation, it is necessary to focus on
the spatial positional relationship between the opera-
tor and the OS (which is a part of one’s body), and
between the operator and the OM (which touches the
target device). For example, if the target device in
front of the operator is manipulated with their hand
facing the direction of the device (in front of their
body), the spatial orientations of the OS and OM will
be coincident. By contrast, when the hand is placed
on the right side of the body and the device placed
on the operator’s left side is operated by the hand, the
spatial orientations of the OS and OM will not coin-
cide.
Researchers examined the influence of the spatial
alignment of the OS’ positions (in this case, the fin-
ger) and the tablet as the target device on the sense of
operation in a VR experimental environment (Feucht-
HUCAPP 2023 - 7th International Conference on Human Computer Interaction Theory and Applications
230

ner and M
¨
uller, 2018). When the tablet was located
above the front of the operator, the operator was re-
quired to raise their arm to reach the tablet, which
aligned the OS and OM. However, with long-term use
of the tablet, the physical fatigue of the arm increased.
The participant gradually lowered their arm to oper-
ate the tablet in a stable position, resulting in a spatial
mismatch between the OS and OM; however, the pa-
tient still reported no significant reduction in the sense
of operation.
The length of the operator’s arm is the distance
between the operator and the OS. However, when the
target device is manipulated by the hand displayed in
a VR space, the length of the arm on the VR is the dis-
tance between the operator and the OM. The effect of
this congruence on the feeling of manipulating the tar-
get device has been discussed (Feuchtner and M
¨
uller,
2017). In this experiment, the operator manipulated
the target object in a VR space with an arm that was
significantly extended in length. Even in this case,
the participants reported that it was possible to have a
sense of physical ownership of the long extended arm
as one’s own arm.
1.5 Motion-Capture Device
Recently, motion-capture devices have attracted at-
tention as input devices (Vlasic et al., 2007). Input
using motion-capture devices has many advantages
from the user’s perspective, including the fact that it
does not require a physical manipulation device, the
input location is not restricted by physical space, and
various input tokens can be generated by free body
movements. They hold great promise as input devices
in the future.
In input using a motion-capture device, the oper-
ator can manipulate the target device by taking their
hand to any location in space and pointing to the hol-
low. When a motion-capture device is used to ma-
nipulate a target device placed at various locations in
space, the spatial positioning relationship between the
operator and the OS, and between the operator and the
OM becomes diverse.
1.6 Research Questions
Based on the above, this study aimed to answer the
following two research questions:
Research Question 1:
In indirect manipulation using a motion-capture in-
put device, how would the operator’s sense of direct
manipulation of the target device be affected by the
spatial arrangement of the OS (in this case, a finger)
and OM (in this case, a pointer displayed on the in-
terface of the target device)? In this study, the spatial
placement of the OM was manipulated by placement
of the target device.
Research Question 2:
How would the operational performances of the target
device be affected by the spatial arrangement of the
OS and OM?
Figure 3: Framework of experimental design.
Our main aim was to investigate whether there is
an interaction between the effects of OS and OM spa-
tial placement on the sense of direct manipulation and
operational performances. For example, do the effects
on the sense of direct manipulation when the target
device is placed in the front or the front-left of the
body (OM factor) differ when manipulation is per-
formed in the space in the front or on the right side
of the body (OS factor)?
The experimental framework is shown in
Figure 3.
2 EXPERIMENT
2.1 Participants
A total of 16 right-handed adults were recruited from
the public.
2.2 Apparatus
In this study, a motion-capture device (Figure 4) was
developed as an input device. This device could mea-
sure a participant’s finger movements by attaching
markers to the tip and root of the index finger of the
right hand.
A display monitor was used as the target device.
An overview of the experimental apparatus is shown
in Figure 5.
Spatial Positions of Operator’s Finger and Operation Device Influencing Sense of Direct Manipulation and Operation Performance
231

Figure 4: Motion capture device used in experiment.
Figure 5: Scene of experimental setting.
Participants performed a pointing task by manipu-
lating the pointer on the monitor through index finger
movements performed in midair.
In this experiment, the participant’s finger corre-
sponded to the OS, the monitor on which the point-
ing task was displayed corresponded to the target de-
vice, and the pointer displayed on the monitor corre-
sponded to the OM.
2.3 Experimental Design
2.3.1 Independent Variables
The three independent variables in this experiment
were the input device position factor, the monitor di-
rection factor, and the monitor distance factor, all of
which were within-participant factors (Table 1).
Input Device Position Factor
The spatial position of the OS was manipulated by
moving the casing of the motion-capture device. This
was the input device position factor, and was com-
posed of the front and right conditions.
Specifically, in one condition, the motion-capture
device was positioned in front of the participant, and
diagonally to the right of the participant in the other
condition.
Monitor Direction Factor
The spatial position of the OM was manipulated by
moving the position of the monitor as the target de-
vice. This was the monitor direction factor, and was
composed of the front and left conditions.
Specifically, the monitor was placed either in front
of the participant or a little to their left . In the latter
condition, the monitor was rotated 55 degrees to the
left from the participant’s frontal direction.
Monitor Distance Factor
The distance between the participant and monitor was
manipulated. This was the monitor distance factor,
and was composed of the near and far conditions.
Specifically, in the near condition, the monitor
was placed 50 cm from the participant; in the far con-
dition, the monitor was placed 100 cm from the par-
ticipant.
2.3.2 Independent Variables
Operation Performance
For each trial, task performance was measured in
terms of the number of errors that indicated the num-
ber of incorrect inputs, completion time (ms), and
pointer travel distance (mm).
SoA
As a subjective measure, participants’ SoA was mea-
sured. Specifically, participants were asked “How
well did you feel you had control over pointing?” and
rated on a seven-point scale from “not at all” to “very
much.”
2.4 Task
The task used in this experiment was to input math-
ematical expressions (such as 21-51=), using a cal-
culator that appeared at the top of the monitor screen.
The calculator was operated by a pointer that was ma-
nipulated by the participant’s right-hand movements.
Figure 6 shows the pointer for inputting digits for the
calculator.
The participants were instructed to enter mathe-
matical expressions as quickly and accurately as pos-
sible. When a digit was entered, its color changed
from blue to orange and a sound was played to pro-
vide feedback to the participants. If the digit was en-
tered correctly, it was displayed below the formula; if
an incorrect digit was entered, it was not displayed.
HUCAPP 2023 - 7th International Conference on Human Computer Interaction Theory and Applications
232
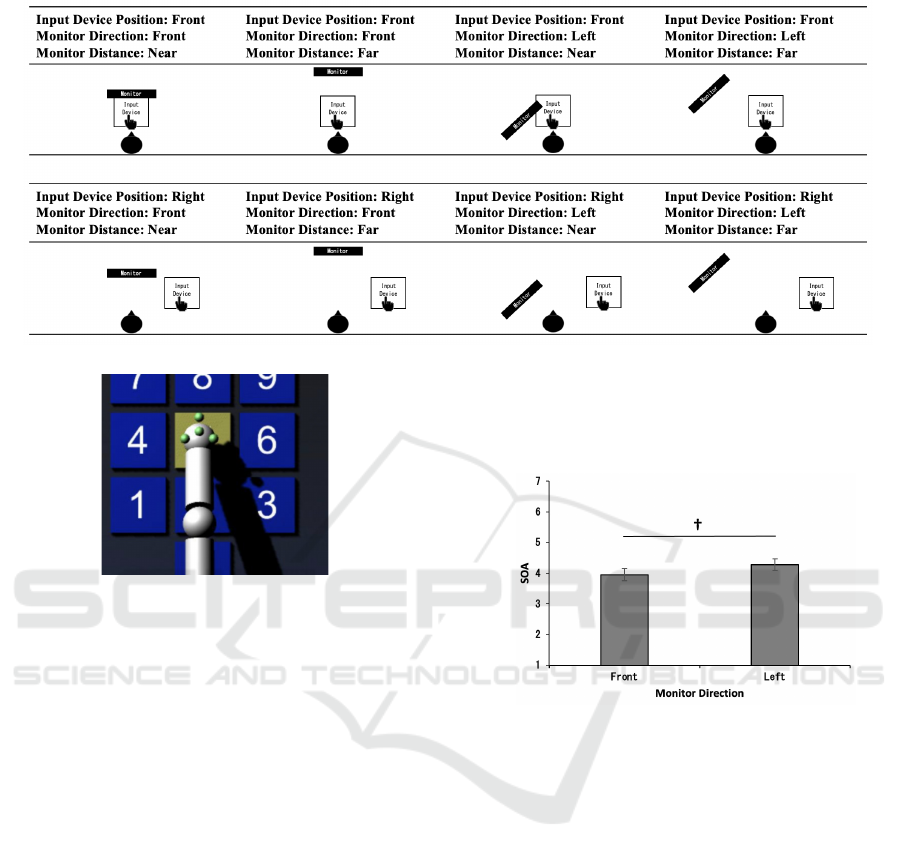
Table 1: Experimental design.
Figure 6: Pointer displayed on the monitor as target device.
2.5 Procedures
The participants first performed practice trials. In
each of the eight conditions, that is, the 2 × 2 × 2 con-
ditions of the three experimental factors, they entered
free formulas for one minute, and confirmed their op-
erations before moving on to the production trials.
The production trial consisted of task and evalua-
tion phases. For each condition, the evaluation phase
was conducted after the task phase was completed.
Twenty-five trials were conducted for each condition
during the task phase. The order of the conditions was
counterbalanced by using the Latin square method.
During the evaluation phase, the participants re-
sponded to a paper-based questionnaire for measuring
the SoA.
3 RESULTS
3.1 SoA
For sense of agency, a three-factor within-participant
analysis of variance (ANOVA) (2: input device posi-
tion factor × 2: monitor direction factor × 2: mon-
itor distance factor) revealed a marginal significance
in the main effect of the monitor direction factor (see
Figure 7). Specifically, the SoA tended to be rated
higher in the left condition than in the front condition
(F(1,15) = 4.158, p = .060).
Figure 7: Result for sense of agency evaluation. Error bars
show standard errors.
Neither the main effects of the input device posi-
tion factor nor the monitor distance factor was signif-
icant.
None of the second-order interaction or the three
first-order interactions were significant.
3.2 Operation Performances
Number of Errors
For the number of errors, the same ANOVA revealed
a significant interaction between the input device po-
sition factor and the monitor distance factor (F(1,15)
= 9.401, p = .008). Figure 8 shows the result for the
number of errors. Simple main effect tests showed
that there were significantly fewer errors in the near
condition than in the far condition of the monitor dis-
tance factor when the input device was placed in front
of the participants (t(15) = 9.775, p = .007), and also
showed fewer errors in the right condition than in
Spatial Positions of Operator’s Finger and Operation Device Influencing Sense of Direct Manipulation and Operation Performance
233

the front condition of the input device position fac-
tor when the target device was placed far from the
participants (t(15) = 10.757, p = .005).
Figure 8: Result for number of errors. Error bars show stan-
dard errors.
None of the three main effects were significant.
A second-order interaction did not reach signifi-
cance, and none of the first-order interactions, other
than the above interaction, reached significance.
Completion Time
For the completion time, the same ANOVA showed
that none of the main effects, the first-order, or the
second-order interactions were significant.
Pointer Travel Distance
For the pointer travel distance, the same ANOVA
showed that the main effect of the monitor distance
factor was significant (Figure 9). Specifically, in the
far condition, the operating distance was significantly
shorter in the near condition (F(1,15) = 11.137, p =
.005).
Figure 9: Result for pointer traveled distance. Error bars
show standard errors.
Neither the main effects of the input device posi-
tion factor nor the monitor direction factor was signif-
icant.
None of the second-order interaction or the three
first-order interactions were significant.
4 DISCUSSION AND
CONCLUSIONS
The SoA (or the sense of direct manipulation) was
slightly higher when the target device was placed at
a left oblique angle than at the front of the partici-
pants. Notably, this effect did not depend on whether
the participants pointed at the front or to the right of
their bodies because we did not detect the interaction
effect of the monitor direction and the input device
position factors.
These results suggest that the improvement in the
sense of direct manipulation does not depend on the
consistency of the orientation of the OS and OM; in-
stead, assigning the OM to the front-left, regardless
of the spatial arrangement of the OS, has a positive
effect on the sense of direct manipulation.
A series of perceptual psychology studies have
shown that humans prefer viewing objects from an
angle rather than from the front (Blanz et al., 1999;
Niimi and Yokosawa, 2009). This is called the three-
quarter view and is often considered the canonical
view. The advantage of the three-quarter view, which
has been confirmed in the perceptual psychology do-
main, is thought to be brought about by the appear-
ance of objects. Although the situation in those stud-
ies is different from that in the present experiment, the
nature of the underlying human cognitive architecture
may explain the experimental results.
There was no interaction effect of the spatial po-
sitions of the OS and OM in determining the sense
of direct manipulation; however, for operational per-
formance, the interaction effect of the input device
position factor and the monitor distance factor was
detected. Specifically, when the input device was
placed in front of the participant (when the participant
stretched their hand in front of themselves to perform
the input), a decrease in performance was observed
when the monitor as the target device was placed far-
ther away. No such performance reduction was ob-
served when the input device was placed at the right
of the participant (when they performed the input on
their right side).
This result indicates the advantage of perform-
ing input operations on the right side of the body for
right-handed participants. This advantage may be be-
cause of the constraints of the body structure, wherein
the right hand rests at the right side of the body. In
the current experiment, we identified only this phe-
nomenon. From a cognitive science perspective, we
need to explain why these advantages emerge.
Finally, from the current limited experiment, we
drew the following hypotheses for two design princi-
ples for indirect manipulation devices when the oper-
HUCAPP 2023 - 7th International Conference on Human Computer Interaction Theory and Applications
234

ation is performed by pointing with a finger:
• When an operator is right-handed, the input oper-
ation should be made on the right side of the their
body (maybe on the left side of the body for left-
handed).
• The target device should be placed on the left front
of the operator. We do not need the consistence
of direction of the target device and the space in
which the finger operates.
REFERENCES
Aarts, H., Wegner, D. M., and Dijksterhuis, A. (2006). On
the feeling of doing: Dysphoria and the implicit mod-
ulation of authorship ascription. Behaviour Research
and Therapy, 44(11):1621–1627.
Blanz, V., Tarr, M. J., and B
¨
ulthoff, H. H. (1999). What ob-
ject attributes determine canonical views? Perception,
28(5):575–599.
Braun, N., Thorne, J. D., Hildebrandt, H., and Debener, S.
(2014). Interplay of agency and ownership: the in-
tentional binding and rubber hand illusion paradigm
combined. PloS one, 9(11):e111967.
Feuchtner, T. and M
¨
uller, J. (2017). Extending the body for
interaction with reality. In Proceedings of the 2017
CHI Conference on Human Factors in Computing Sys-
tems, pages 5145–5157.
Feuchtner, T. and M
¨
uller, J. (2018). Ownershift: Facili-
tating overhead interaction in virtual reality with an
ownership-preserving hand space shift. In Proceed-
ings of the 31st Annual ACM Symposium on User In-
terface Software and Technology, pages 31–43.
Haggard, P., Clark, S., and Kalogeras, J. (2002). Voluntary
action and conscious awareness. Nature neuroscience,
5(4):382–385.
Kalckert, A. and Ehrsson, H. H. (2012). Moving a rubber
hand that feels like your own: a dissociation of own-
ership and agency. Frontiers in human neuroscience,
6:40.
Limerick, H., Coyle, D., and Moore, J. W. (2014). The
experience of agency in human-computer interactions:
a review. Frontiers in human neuroscience, 8:643.
Marcos, S., G
´
omez-Garc
´
ıa-Bermejo, J., and Zalama, E.
(2010). A realistic, virtual head for human–computer
interaction. Interacting with Computers, 22(3):176–
192.
Moore, J. W. (2016). What is the sense of agency and why
does it matter? Frontiers in psychology, 7:1272.
Niimi, R. and Yokosawa, K. (2009). Three-quarter views
are subjectively good because object orientation is un-
certain. Psychonomic bulletin & review, 16(2):289–
294.
Polanyi, M. (1958). Personal knowledge: Towards a Post-
Critical Philosophy. University of Chicago Press.
Rautaray, S. S. and Agrawal, A. (2015). Vision based hand
gesture recognition for human computer interaction: a
survey. Artificial intelligence review, 43(1):1–54.
Sato, A. and Yasuda, A. (2005). Illusion of sense of self-
agency: discrepancy between the predicted and actual
sensory consequences of actions modulates the sense
of self-agency, but not the sense of self-ownership.
Cognition, 94(3):241–255.
Seinfeld, S., Feuchtner, T., Maselli, A., and M
¨
uller, J.
(2021). User representations in human-computer
interaction. Human–Computer Interaction, 36(5-
6):400–438.
Vlasic, D., Adelsberger, R., Vannucci, G., Barnwell, J.,
Gross, M., Matusik, W., and Popovi
´
c, J. (2007). Prac-
tical motion capture in everyday surroundings. ACM
transactions on graphics (TOG), 26(3):35–es.
Spatial Positions of Operator’s Finger and Operation Device Influencing Sense of Direct Manipulation and Operation Performance
235
