
3D Human Body Reconstruction from Head-Mounted Omnidirectional
Camera and Light Sources
Ritsuki Hasegawa, Fumihiko Sakaue and Jun Sato
Nagoya Institute of Technology, Nagoya 466-8555, Japan
Keywords:
Human Body, Head-Mounted Camera, Shadow, SMPL, Light Source, Omnidirectional Camera.
Abstract:
In this paper, we propose a method for reconstructing a whole 3D shape of the human body from a single
image taken by a head-mounted omnidirectional camera. In the image of a head-mounted camera, many parts
of the human body are self-occluded, and it is very difficult to reconstruct the 3D shape of the human body
including the invisible parts. The proposed method focuses on the shadows of the human body generated by
the light sources in the scene and uses it to perform highly accurate 3D reconstruction of the whole human
body including the hidden parts.
1 INTRODUCTION
HEREHEREHEREIn recent years, 3D human pose
analysis has been utilized for various applications. In
sports science, human pose analysis is used to im-
prove athletes’ form, and in security, pose analysis is
used to detect dangerous human behavior.
Many methods of 3D human pose estimation have
been proposed in the past. The standard method is
to place cameras around the human body and recover
human poses from images taken by these cameras (El-
hayek et al., 2015a; Mehta et al., 2017a; Mehta et al.,
2017b). However, these methods are difficult to use
in real-world environments because of the space re-
quired to place the cameras and the fact that the cam-
eras cannot be moved.
3D pose estimation methods using self-
attached devices such as inertial measurement
units (IMUs) (von Marcard et al., 2017) and
Structure-From-Motion (SFM) (Shiratori et al., 2011)
that uses multiple cameras have also been proposed.
These methods have problems such as the need
for prior calibration and the inability to perform
real-time estimation due to pose optimization after
measurement.
Recently, Mo
2
cap
2
(Xu et al., 2019) has been pro-
posed for solving these problems. It uses a single
fisheye camera mounted on the human head and uses
deep learning to achieve a highly accurate real-time
estimation of human poses. However, as shown in
Fig. 1 (a), many parts of the human body are often
hidden in the image obtained from the head-mounted
camera, and accurate estimation is not possible in
(a) images taken by head-mounted camera
(b) (c)
Figure 1: Head-mounted camera images and shadows.
such cases. Therefore, in this paper, we propose a
method for using a combination of object and shadow
images to accurately recover the entire shape of the
human body from a single head-mounted image.
As shown in Fig. 1 (b), in many cases, the head-
mounted camera image contains not only the image
of the object but also a shadow of the object. The
shadow is nothing but image information obtained by
observing the object from the viewpoint of a light
source. In other words, if the light source is consid-
ered a camera, the shadow is an image from the view-
point of this virtual camera. Fig. 1 (c) shows an indoor
image, in which we have multiple shadows. This situ-
ation often arises in indoor scenes, since indoors often
have multiple light sources. In such a case, each of the
shadows can be considered as a camera image with a
982
Hasegawa, R., Sakaue, F. and Sato, J.
3D Human Body Reconstruction from Head-Mounted Omnidirectional Camera and Light Sources.
DOI: 10.5220/0011724600003417
In Proceedings of the 18th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2023) - Volume 5: VISAPP, pages
982-989
ISBN: 978-989-758-634-7; ISSN: 2184-4321
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)

different viewpoint, and so we have many camera im-
ages of the human body in a single image. Thus, by
using shadow images, it is possible to recover the 3D
human body using camera images with a large num-
ber of different viewpoints. In this paper, we improve
the accuracy of the reconstruction of hidden parts in
the head-mounted image by using such shadow-based
multi-viewpoint images.
2 RELATED WORK
Human motion capture has traditionally been per-
formed using a large number of fixed cameras. An-
other standard method is to use markers, which re-
quire humans to wear markers or special suits. The
markerless motion capture system (Bregler and Ma-
lik, 1998; Joo et al., 2016) overcomes these limita-
tions of markers. While most methods capture human
motions in indoor scenes, a motion capture method
with a small number of cameras in outdoor scene (Bu-
renius et al., 2013; Elhayek et al., 2015b; Pavlakos
et al., 2017) has also been proposed. However, there
was a problem that it took time to set up the camera
system and there were restrictions on the setup loca-
tion.
Pose estimation using monocular camera images
provides real-time pose estimation by using deep
learning. Some of these methods estimate 3D pose
directly from the image (Pavlakos et al., 2016; Tekin
et al., 2016), while others combine 2D pose es-
timation with depth or heat maps to estimate 3D
pose (Zhou et al., 2017; Pavlakos et al., 2018). How-
ever, these methods use images taken by standard
perspective cameras placed to obtain good views of
the entire human body, whereas our method uses an
omnidirectional camera mounted on the human head.
The camera images obtained from the head-mounted
omnidirectional camera are highly distorted and have
many self-occlusions, so the existing methods cannot
be applied.
Recently, a head-mounted camera based 3D pose
estimation method, Mo
2
Cap
2
(Xu et al., 2019), was
proposed. In this method, while the body parts visi-
ble from the camera can be estimated with high accu-
racy, the hidden parts of the body cannot be estimated
well. Thus, we in this paper propose a method for es-
timating the entire body including such hidden parts
by using shadows generated by light sources.
For 3D human body reconstruction, a parametric
human model is often used. Skinned Multi-Person
Linear (SMPL) model (Loper et al., 2015; Pavlakos
et al., 2019; Anguelov et al., 2005) is one of the most
popular parametric human body models, which is rep-
resented by a mesh of 6890 points and 23 joint points.
They are determined by the pose parameter θ and the
body shape parameter β. Many methods have been
proposed for recovering the 3D human body by us-
ing the SMPL model (Kanazawa et al., 2018; Bogo
et al., 2016; Kolotouros et al., 2019). Kanazawa
et al. (Kanazawa et al., 2018) proposed an efficient
method for estimating the SMPL parameters from an
image by using deep learning. This method can re-
cover SMPL parameters from a single viewpoint im-
age, and the camera parameters are estimated simul-
taneously with the SMPL parameters.
While these methods estimate the human body
shape from front-parallel camera images, our method
uses an omnidirectional camera mounted on the hu-
man head. Therefore, the images used in our method
are highly distorted and many parts of the human
body are self-occluded. So, the existing methods can-
not be applied to our task. In this paper, we solve
these problems by learning the relationship between
the distorted images and SMPL parameters and using
virtual multi-viewpoint images obtained from shad-
ows in a single image.
3 RECOVERY OF 3D HUMAN
BODY USING SHADOWS
In this research, the object and shadows in a single
omnidirectional image are combined for recovering
highly accurate 3D human shapes. For this objective,
we first explain the 3D human model and its parame-
ters.
3.1 3D Human Body Model
For representing the 3D human body, we use the
SMPL model, M(θ, β) ∈ R
3×6980
, which has the pose
parameter θ ∈ R
3K
and the shape parameter β ∈ R
10
,
where K represents the number of joint points, and in
this research K = 23.
Estimation of the SMPL model is performed using
the floor coordinate system. The floor coordinate sys-
tem consists of two axes parallel to the floor surface
and one vertical axis. The origin of the floor coor-
dinate system is at the intersection of a line perpen-
dicular to the floor that passes through the camera’s
viewpoint and the floor. We represent the relationship
between the SMPL model and the floor coordinates
by the rotation R ∈R
3
and the translation t ∈R. Thus,
the SMPL model represented based on the floor coor-
dinates is described as follows:
ˆ
X = RM(θ, β) +t (1)
3D Human Body Reconstruction from Head-Mounted Omnidirectional Camera and Light Sources
983

Encoder
Image
feature
Regression
Update
∆Θ
!
Θ
!"#
= Θ
!
+ ∆Θ
!
Resnet
(pre-train)
Head Image
Discriminator
Θ
T/F
𝐿
$%&'
= 𝒙 − 𝒙
'
(
(
𝐿
&')
𝐿
*$&'+,
= 𝒙 − 𝒙
'
(
(
Body Joints
projection
Shadow Joints
projection
𝐿
-.
𝐿
/&0%1&
𝐿
234$5
Figure 2: Network structure of Method 1.
The reason for representing the human body
model in the floor coordinate system is to consider the
shadow projection of the human body on the floor. We
will consider this shadow projection later.
3.2 Projection to Omnidirectional
Camera
The human body represented in the floor coordinate
system is then converted to the camera coordinate sys-
tem and projected onto the image.
In this research, the camera is fixed to the hu-
man head and its pose is equivalent to the head pose.
Therefore, the camera pose can be obtained from the
estimated SMPL parameters. The camera coordinate
system is defined so that the direction from the neck to
the top of the head is the z-axis, the direction from the
right eye to the left eye is the x-axis, and the y-axis is
orthogonal to these two directions. Then, the human
body represented in the floor coordinate system can
be converted to the camera coordinate system.
In this research, we use an omnidirectional cam-
era. Therefore, the images are represented in equirect-
angular format. In equirectangular format, a 3D point
X= (X, Y, Z) in the camera coordinate systems is pro-
jected to an image point as follows:
λ = tan
−1
Y
X
ϕ = tan
−1
Z
√
X
2
+Y
2
(2)
where, λ and ϕ represent the longitude and latitude in
the image.
Then, the human body represented by the SMPL
model is projected to the omnidirectional image as
follows:
ˆ
x = Π(RM(θ, β) + t) (3)
where Π denotes the projection to the omnidirectional
image with the coordinate transformation.
3.3 Shadow Projection
Shadow projection is performed by obtaining a
shadow on the floor surface in the floor coordinate
system, converting it to the camera coordinate system,
and projecting it onto the omnidirectional image.
The shadow is formed at the intersection of the
straight line connecting the light source and the object
and the floor surface. Assuming that the light source
is at infinity and its direction is (l
x
, l
y
, 1), the shadow
point X
′
= (X
′
, Y
′
, Z
′
) on the floor which corresponds
to the 3D point X = (X, Y, Z) can be represented as
follows:
X
′
= LX (4)
where, L denotes the following matrix:
L =
1 0 −l
x
0 1 −l
y
0 0 0
(5)
Thus, the shadow of the human body represented
by the SMPL model is projected to the omnidirec-
tional image as follows:
ˆ
x = Π(LRM(θ, β) + t) (6)
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
984

Encoder
Image
feature
Regression
Update
∆Θ
!
Θ
!"#
= Θ
!
+ ∆Θ
!
Resnet
(pre-train)
Head Image
Discriminator
Θ
T/F
𝐿
$%&'
= 𝒙 − 𝒙
'
(
(
𝐿
&')
𝐿
*$&'+,
= 𝒙 − 𝒙
'
(
(
Body Joints
projection
Shadow Joints
projection
𝐿
-.
𝐿
/&0%1&
𝐿
234$5
U-Net
Figure 3: Network structure of Method 2.
where Π denotes the projection to the omnidirectional
image with the coordinate transformation, and L de-
notes the shadow generation described by Eq. (4).
3.4 Network and Estimation
In this research, we estimate the SMPL parameters
{θ, β}, rotation R, translation t, and light source pa-
rameters l simultaneously. Thus, we estimate an
83+2n dimensional vector Θ = {θ, β, R, t, l}by using
the network, where n is the number of light sources,
i.e. the number of shadows.
The network structure of the proposed method is
shown in Fig 2. Our network is based on the network
proposed by Kanazawa et al. (Kanazawa et al., 2018),
but it is different from their network in some respects.
Since our method uses shadows in the scene, we es-
timate not only the SMPL model but also the light
sources in the scene. By using the loss obtained from
the shadows, our network can estimate the SMPL
model accurately, even if the head-mounted camera
image has heavy self-occlusions.
The network takes a single head-mounted cam-
era image as input and outputs the parameter Θ =
{θ, β, R, t, l}. Estimation is performed in two steps.
First, the image is input to Encoder, which extracts
image features using a pre-trained Resnet (He et al.,
2015). Next, the output of the Encoder is fed to the
residual network to estimate Θ. The residual network
is used here because it is difficult to estimate the rota-
tion parameters directly in a single estimation.
The estimation is evaluated by L
2
loss of the esti-
mated 3D joint point L
3D
, camera parameters L
camera
,
and light parameters L
light
. The camera parameter
loss L
camera
is used in our network since the accu-
racy of camera pose estimation greatly affects other
parameters and is particularly important. The repro-
jection errors for body joints in the image L
head
and
shadow joints in the image L
shadow
are also evalu-
ated. The reprojection error of shadow joints L
shadow
is computed for the number of shadows.
In addition, the proposed network has the dis-
criminator and performs adversarial training (Good-
fellow et al., 2014). This is to prevent the estimated
SMPL from deviating too much from the real hu-
man body structure by discriminating between the es-
timated SMPL parameters and the SMPL parameter
datasets for various real poses.
Thus, the training loss of our network is described
as follows:
L = w
1
L
3D
+ w
2
L
light
+ w
3
L
camera
+ w
4
L
head
+ w
5
L
shadow
+ w
6
L
adv
(7)
We train the network by minimizing the loss. In our
experiments, we chose w
1
= 1.0, w
2
= 6.0, w
3
= 7.5,
w
4
= 750, w
5
= 1.0, and w
6
= 2.0.
3.5 Estimation with Shadow Extraction
Up to now, a camera image was input to Encoder
without any processing. However, it may be diffi-
3D Human Body Reconstruction from Head-Mounted Omnidirectional Camera and Light Sources
985

(a) (b) camera image (c) segmentation
Figure 4: Dataset images. (a) shows a head-mounted omni-
directional camera, (b) shows camera images, and (c) shows
segmented images.
cult for the network to identify shadows in the im-
age. Therefore, we also consider an alternate method
in which shadow regions are extracted in advance and
input to Encoder with the original camera image. We
call the method without shadow extraction Method 1
and call the method with shadow extraction Method 2
respectively.
The network structure of Method 2 is shown in
Fig. 3. Segmentation images are generated from the
head-mounted camera images and input to different
Encoders to extract image features. These are then
combined and input to a residual network for param-
eter estimation. The loss function for training is the
same as in Method 1.
Shadow regions are extracted by generating seg-
mentation images. Although instance segmentation
can distinguish between objects and can handle mul-
tiple shadows separately, it has a problem in the repre-
sentation of overlapping shadows. Therefore, we use
semantic segmentation in this research. Segmentation
is performed by U-Net (Ronneberger et al., 2015).
The image is segmented into three classes: human
body, shadow, and others. Shadows are represented as
a single class and are not separated from each other.
4 DATASETS
In this research, two types of datasets are used for
training: a dataset of head-mounted camera images
and an SMPL dataset. The Human3.6M dataset
(Ionescu et al., 2014) is annotated with 3D joint
points. However, the camera used in our method is
an omnidirectional camera and the image format is
different. The MonoEye dataset (Hwang et al., 2020)
is a dataset taken with a fisheye lens, but the camera
is positioned at the thorax, which is different from the
viewpoint of the head-mounted camera used in our
method. Therefore, we need to create a new dataset
for training our network. In this research, annota-
tion of shadow joint points is required for the head-
Table 1: Number of shadows and accuracy of human body
recovery.
MPJPE (mm)
0 shadow 259.39
1 shadow 200.24
2 shadows 166.46
Table 2: Accuracy of proposed method with/without
shadow segmentation (MPJPE (mm)).
Method 1 Method 2
1 shadow 200.24 182.58
2 shadows 166.46 143.97
mounted camera image, but it is difficult to create
such a dataset by using a real head-mounted omnidi-
rectional camera. Therefore, we created a dataset with
synthetic images using Unity. Human models created
by Autodesk Character Generator (Autodesk, 2022)
and 210 animations downloaded from Mixamo (Mix-
amo, 2022) were used for generating synthetic im-
ages. The position of the light source and its intensity
was selected randomly,
The dataset consists of a single head-mounted
camera image with 3D joint points, 2D joint points,
2D shadow joint points, light source parameters, and
true-value annotations for camera pose. The ground
truth of the segmentation image was generated by cre-
ating images with and without shadows and taking
the difference between them. A part of the dataset
is shown in Fig. 4. Fig. 4 (a) shows a head-mounted
omnidirectional camera used for creating the dataset,
Fig. 4 (b) shows camera images, and Fig. 4 (c) shows
segmented images.
We also used Mosh dataset (Loper et al., 2014) as
the ground truth SMPL dataset for adversarial train-
ing. The generator is trained so that the discriminator
cannot distinguish between the generated SMPL and
the ground truth SMPL.
5 EXPERIMENT
Experiments were conducted using the synthetic im-
age dataset described in section 4. Three types of light
sources (0, 1, and 2) were used for training and test-
ing, where 0 light means we do not use shadow in-
formation. The training data consists of 3150 images
without shadows (15 models, 210 poses), 15750 im-
ages with one shadow (15 models, 210 poses, 5 light
source positions), and 15750 images with two shad-
ows (15 models, 210 poses, 5 light source positions).
The test data consists of 100 images each.
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
986

C
1 shadow
2 shadow
0 shadow
1 shadow
2 shadow
0 shadow
3D joints
SMPL
Body joints
Shadow joints
Figure 5: Result of the proposed method in the case of 0 shadow, 1 shadow, and 2 shadows. Red lines and green lines in 3D
joints represent true poses and estimated poses respectively. Body joints and Shadow joints show reprojection of body and
shadow joints on the input omnidirectional image.
We first show the results of Method 1. Fig. 5
shows the 3D joints and SMPL human body estimated
from our method in the case of 0 shadow, 1 shadow,
and 2 shadows respectively. We also show the re-
projection of the estimated 3D joints of the body and
shadows. As shown in this figure, the accuracy of the
estimated results improves as the number of shadows
increases. In particular, the accuracy of estimation in
Z axis, which cannot be determined from the human
body image alone, improves as the number of shad-
ows, i.e. the number of viewpoints, increases. We
can also find that the accuracy of invisible feet also
improves.
A quantitative evaluation of the test results was
also conducted. Table 1 shows Mean Per Joints Po-
sition Error (MPJPE) of the estimated human body
in the case of 0 shadow, 1 shadow, and 2 shadows.
We find that the accuracy improves as the number of
shadows increases. This confirms the effectiveness of
using shadows in 3D human body reconstruction from
head-mounted camera images.
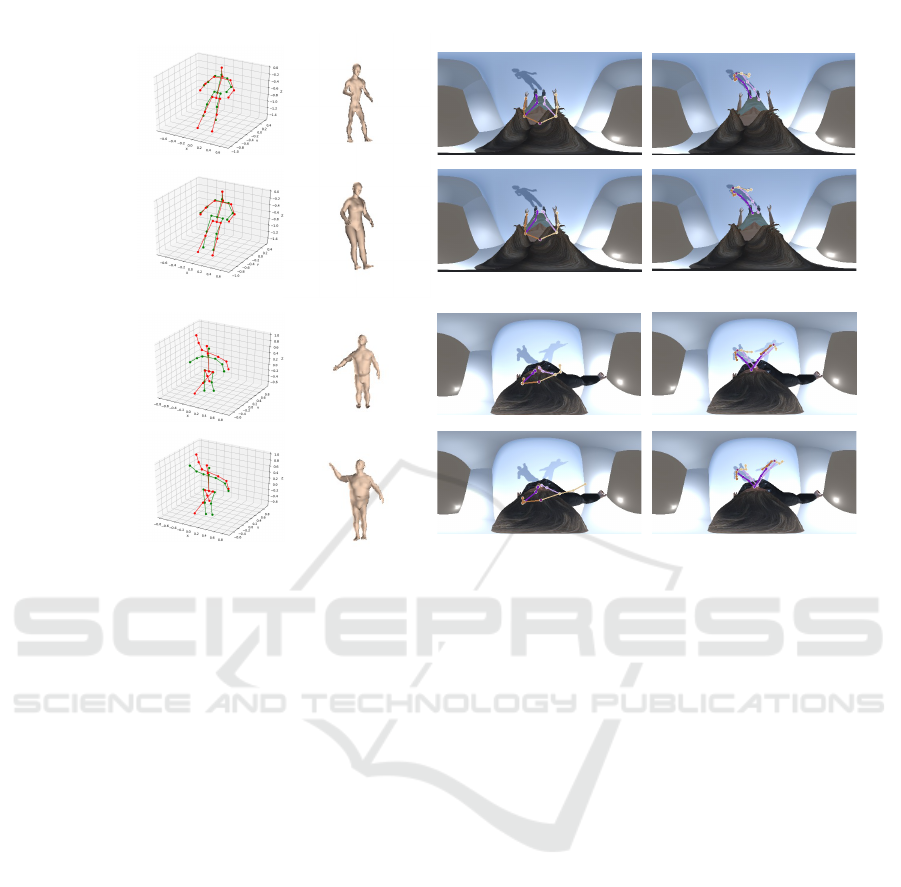
We next evaluate Method 2, which combines
Method 1 with shadow extraction. The 3D human
body estimated by using Method 2 is shown in Fig. 6.
In both cases of one and two shadows, we find
that Method 2 using shadow segmentation improves
the accuracy of the reprojection of shadows and the
overall accuracy of the recovered body compared to
Method 1. In particular, in the case of the two shad-
ows, the right arm of the image is successfully recov-
ered since the shadow information, which is not fully
used in Method 1, is captured and used for the esti-
mation in Method 2.
Method 2 was also quantitatively evaluated by
MPJPE . The results are shown in Table 2. We find
that MPJPE of Method 2 is lower than that of Method
3D Human Body Reconstruction from Head-Mounted Omnidirectional Camera and Light Sources
987
w/ segmentation
w/o segmentation
1 Shadow
2 Shadow
3D joints
SMPL
Body joints
Shadow joints
w/ segmentation
w/o segmentation
Figure 6: Results of the proposed method with and without shadow segmentation in the case of 1 shadow and 2 shadows.
1 in both cases where the number of shadows is 1 and
2. These results confirm the effectiveness of using
shadow extraction in the proposed method.
6 CONCLUSIONS
In this paper, we proposed a method for recovering
the 3D shape of the human body by using shadows
in a single head-mounted camera image. We also
proposed a method for extracting shadow regions by
using semantic segmentation and combining the re-
sults to further improve the accuracy of the proposed
method.
We created a synthetic image dataset using Unity
and conducted experiments using the dataset. We
showed that by using the shadows in the image, the
estimation of the 3D human body can use multiple
views, and as a result, we can drastically improve the
accuracy of human body estimation, even if the head-
mounted images suffer from self-occlusion.
In our future work, we will conduct the evalua-
tion of our method using images obtained from a real
head-mounted omnidirectional camera under various
environments.
REFERENCES
Anguelov, D., Srinivasan, P., Koller, D., Thrun, S., Rodgers,
J., and Davis, J. (2005). Scape: shape completion and
animation of people. ACM Trans. Graph., 24:408–
416.
Autodesk (2022). Autodesk character generator.
https://charactergenerator.autodesk.com/.
Bogo, F., Kanazawa, A., Lassner, C., Gehler, P., Romero,
J., and Black, M. J. (2016). Keep it SMPL: Auto-
matic estimation of 3D human pose and shape from
a single image. In Computer Vision – ECCV 2016,
Lecture Notes in Computer Science. Springer Interna-
tional Publishing.
Bregler, C. and Malik, J. (1998). Tracking people with
twists and exponential maps. In Proceedings. 1998
IEEE Computer Society Conference on Computer Vi-
sion and Pattern Recognition (Cat. No.98CB36231),
pages 8–15.
Burenius, M., Sullivan, J., and Carlsson, S. (2013). 3d pic-
torial structures for multiple view articulated pose es-
timation. In 2013 IEEE Conference on Computer Vi-
sion and Pattern Recognition, pages 3618–3625.
Elhayek, A., Aguiar, E., Jain, A., Tompson, J., Pishchulin,
L., Andriluka, M., Bregler, C., Schiele, B., and
Theobalt, C. (2015a). Efficient convnet-based marker-
less motion capture in general scenes with a low num-
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
988

ber of cameras. In IEEE Conference on Computer Vi-
sion and Pattern Recognition (CVPR).
Elhayek, A., de Aguiar, E., Jain, A., Tompson, J.,
Pishchulin, L., Andriluka, M., Bregler, C., Schiele,
B., and Theobalt, C. (2015b). Efficient convnet-based
marker-less motion capture in general scenes with a
low number of cameras. In 2015 IEEE Conference
on Computer Vision and Pattern Recognition (CVPR),
pages 3810–3818.
Goodfellow, I., Pouget-Abadie, J., Mirza, M., Xu, B.,
Warde-Farley, D., Ozair, S., Courville, A., and Ben-
gio, Y. (2014). Generative adversarial nets. In
Advances in neural information processing systems,
pages 2672–2680.
He, K., Zhang, X., Ren, S., and Sun, J. (2015). Deep
residual learning for image recognition. CoRR,
abs/1512.03385.
Hwang, D.-H., Aso, K., Yuan, Y., Kitani, K., and Koike, H.
(2020). Monoeye: Multimodal human motion capture
system using a single ultra-wide fisheye camera. In
Proceedings of the 33rd Annual ACM Symposium on
User Interface Software and Technology, UIST ’20,
pages 98–111.
Ionescu, C., Papava, D., Olaru, V., and Sminchisescu, C.
(2014). Human3.6m: Large scale datasets and pre-
dictive methods for 3d human sensing in natural envi-
ronments. IEEE Transactions on Pattern Analysis and
Machine Intelligence, 36:1325–1339.
Joo, H., Simon, T., Li, X., Liu, H., Tan, L., Gui, L., Baner-
jee, S., Godisart, T., Nabbe, B. C., Matthews, I. A.,
Kanade, T., Nobuhara, S., and Sheikh, Y. (2016).
Panoptic studio: A massively multiview system for
social interaction capture. CoRR, abs/1612.03153.
Kanazawa, A., Black, M. J., Jacobs, D. W., and Malik,
J. (2018). End-to-end recovery of human shape and
pose. In Computer Vision and Pattern Regognition
(CVPR).
Kolotouros, N., Pavlakos, G., Black, M. J., and Dani-
ilidis, K. (2019). Learning to reconstruct 3d human
pose and shape via model-fitting in the loop. CoRR,
abs/1909.12828.
Loper, M., Mahmood, N., Romero, J., Pons-Moll, G., and
Black, M. J. (2015). SMPL: A skinned multi-person
linear model. ACM Trans. Graphics (Proc. SIG-
GRAPH Asia), 34(6):248:1–248:16.
Loper, M. M., Mahmood, N., and Black, M. J. (2014).
MoSh: Motion and shape capture from sparse mark-
ers. ACM Transactions on Graphics, (Proc. SIG-
GRAPH Asia), 33(6):220:1–220:13.
Mehta, D., Rhodin, H., Casas, D., Fua, P., Sotnychenko, O.,
Xu, W., and Theobalt, C. (2017a). Monocular 3d hu-
man pose estimation in the wild using improved cnn
supervision. In 3D Vision (3DV), 2017 Fifth Interna-
tional Conference on. IEEE.
Mehta, D., Sridhar, S., Sotnychenko, O., Rhodin, H.,
Shafiei, M., Seidel, H., Xu, W., Casas, D., and
Theobalt, C. (2017b). Vnect: Real-time 3d human
pose estimation with a single RGB camera. CoRR,
abs/1705.01583.
Mixamo (2022). Get animated. https://www.mixamo.com/.
Pavlakos, G., Choutas, V., Ghorbani, N., Bolkart, T., Os-
man, A. A. A., Tzionas, D., and Black, M. J. (2019).
Expressive body capture: 3D hands, face, and body
from a single image. In Proceedings IEEE Conf. on
Computer Vision and Pattern Recognition (CVPR),
pages 10975–10985.
Pavlakos, G., Zhou, X., and Daniilidis, K. (2018). Ordi-
nal depth supervision for 3d human pose estimation.
CoRR, abs/1805.04095.
Pavlakos, G., Zhou, X., Derpanis, K. G., and Daniilidis,
K. (2016). Coarse-to-fine volumetric prediction for
single-image 3d human pose. CoRR, abs/1611.07828.
Pavlakos, G., Zhou, X., Derpanis, K. G., and Daniilidis, K.
(2017). Harvesting multiple views for marker-less 3d
human pose annotations. CoRR, abs/1704.04793.
Ronneberger, O., Fischer, P., and Brox, T. (2015). U-net:
Convolutional networks for biomedical image seg-
mentation. In International Conference on Medical
image computing and computer-assisted intervention,
pages 234–241. Springer.
Shiratori, T., Park, H. S., Sigal, L., Sheikh, Y., and Hodgins,
J. K. (2011). Motion capture from body-mounted
cameras. ACM Trans. Graph., 30(4).
Tekin, B., Katircioglu, I., Salzmann, M., Lepetit, V.,
and Fua, P. (2016). Structured prediction of 3d
human pose with deep neural networks. CoRR,
abs/1605.05180.
von Marcard, T., Rosenhahn, B., Black, M., and Pons-
Moll, G. (2017). Sparse inertial poser: Automatic
3d human pose estimation from sparse imus. Com-
puter Graphics Forum 36(2), Proceedings of the 38th
Annual Conference of the European Association for
Computer Graphics (Eurographics).
Xu, W., Chatterjee, A., Zollhoefer, M., Rhodin, H., Fua,
P., Seidel, H.-P., and Theobalt, C. (2019). Mo
2
Cap
2
: Real-time mobile 3d motion capture with a cap-
mounted fisheye camera. IEEE Transactions on Vi-
sualization and Computer Graphics, pages 1–1.
Zhou, X., Huang, Q., Sun, X., Xue, X., and Wei, Y. (2017).
Weakly-supervised transfer for 3d human pose esti-
mation in the wild. CoRR, abs/1704.02447.
3D Human Body Reconstruction from Head-Mounted Omnidirectional Camera and Light Sources
989
