
Distributed Collaborative Incident Validation in a Self-Organised Traffic
Control System
Ingo Thomsen
a
, Torben Brennecke and Sven Tomforde
b
Intelligent Systems, Kiel University, 24118 Kiel, Germany
Keywords:
Traffic Management, Organic Traffic Control, Traffic Incident Detection, Incident Validation.
Abstract:
The continuous trend of raising traffic volumes in urban areas causes waiting times and exhaust emissions.
As one promising response to these challenges, increasingly intelligent and adaptive traffic management sys-
tems are being developed. For instance, self-organised approaches such as the Organic Traffic Control offer
advantages in terms of scalability and robustness compared to traditional systems. This can be increased by
taking locally detected incidents into account. To improve the accuracy of automatically detected incidents
and to allow for integration in the traffic control strategies, this paper proposes algorithms for the validation
of potential incidents. This is done by incorporating respective insights of varying levels from neighbouring
intersections and consequently determining a neighbour-supported view of local incident information.
1 INTRODUCTION
The tendency of high traffic demands generated by
public transportation or private vehicles is unbroken.
This high load leads to congestions, increased pollu-
tion and travel delays. For this reason, modern traffic
management systems are important for handling these
negative effects in urban traffic networks. Typically,
these road networks do not feature highly prioritised
roads and are not characterised by exits and driveways
but by intersections, equipped with traffic light con-
trollers (TLC). The management of these TLCs can
be organised in a centralised or decentralised manner
or by using various levels in between.
One example of a fully distributed approach is the
“Organic Traffic Control” (OTC), a self-adaptive and
self-organised traffic management system which of-
fers routing advice to traffic participants in terms of
infrastructure-based route guidance (Sommer et al.,
2016) as well as flow-dependent and proactive adap-
tation of TLCs. Such a system can offer de-
centralised, intersection-centred incident detection
(Thomsen et al., 2021a). To this end, OTC will be
adapted to use information beyond traffic flows when
adapting the TLCs, but without relying on a global
view. With less knowledge about the traffic situation,
it is desirable to improve the detection accuracy.
a
https://orcid.org/0000-0002-0850-4786
b
https://orcid.org/0000-0002-5825-8915
Based on the first concept presented in (Tomforde
and Thomsen, 2022), a generalised approach is pro-
posed for a collaborative incident validation which
is independent of the underlying incident detection
mechanism. This generality is realised by handling
various levels of knowledge about an incident which
is detected with an associated confidence value. It
makes use of local neighbourhoods and the properties
of traffic volumes as they pass from one intersection
to another, resulting in comparable patterns.
The remainder of this article is organised as fol-
lows: The next Section 2 provides a brief overview
of self-organised traffic control and incident detec-
tion, while Section 3 outlines the network and inci-
dent model as well as the assumed knowledge levels
used in this work. Section 4 then explains the pro-
posed validation approach, followed by an evaluation
in Section 5. The final Section 6 offers some conclu-
sions and an outlook on future work.
2 BACKGROUND
This collaborative validation of detected incidents is
proposed in the context of the self-organised OTC
system whose components are outlined here to pro-
vide the background of this work.
152
Thomsen, I., Brennecke, T. and Tomforde, S.
Distributed Collaborative Incident Validation in a Self-Organised Traffic Control System.
DOI: 10.5220/0011725000003479
In Proceedings of the 9th International Conference on Vehicle Technology and Intelligent Transport Systems (VEHITS 2023), pages 152-159
ISBN: 978-989-758-652-1; ISSN: 2184-495X
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
2.1 Self-Organised Traffic Control
Traffic light controllers are vital for managing urban
road networks. Widely-used systems to control the
TLCs are SCOOT (Robertson and Bretherton, 1991),
SCATS (Sims and Dobinson, 1980), MOVA (Vin-
cent et al., 1990), and UTOPIA/-SPOT (Mauro and
Taranto, 1990): Centralised controller gather data
about the traffic situation which is analysed for the
change of the signalisation policies. These ap-
proaches have limits, as they require all sensor data to
be processed centrally and in a timely manner. This
results in a single point-of-failure and limits the real-
time capabilities.
Alternatively, self-adaptive and self-organised
(SASO) systems rely on decision-making, based on
the locally assessed traffic situation. This is done
by local intersection controllers (IC) which can po-
tentially communicate with neighbouring ICs. Ex-
emplary systems use predictive control (Oliveira and
Camponogara, 2010) or multi-agent approaches and
fuzzy-logic (Gokulan and Srinivasan, 2010).
2.2 Organic Traffic Control
The SASO system which is the basis for the pro-
posed collaborative incident validation, is the Organic
Traffic Control (OTC) (Prothmann et al., 2009). It
is designed based on “Organic Computing” (M
¨
uller-
Schloer and Tomforde, 2017): Principles found in na-
ture are transferred to technical systems to achieve
“life-like” behaviour. Small, autonomous entities are
used in decentralised structures and combined with
machine learning techniques for local adaptation.
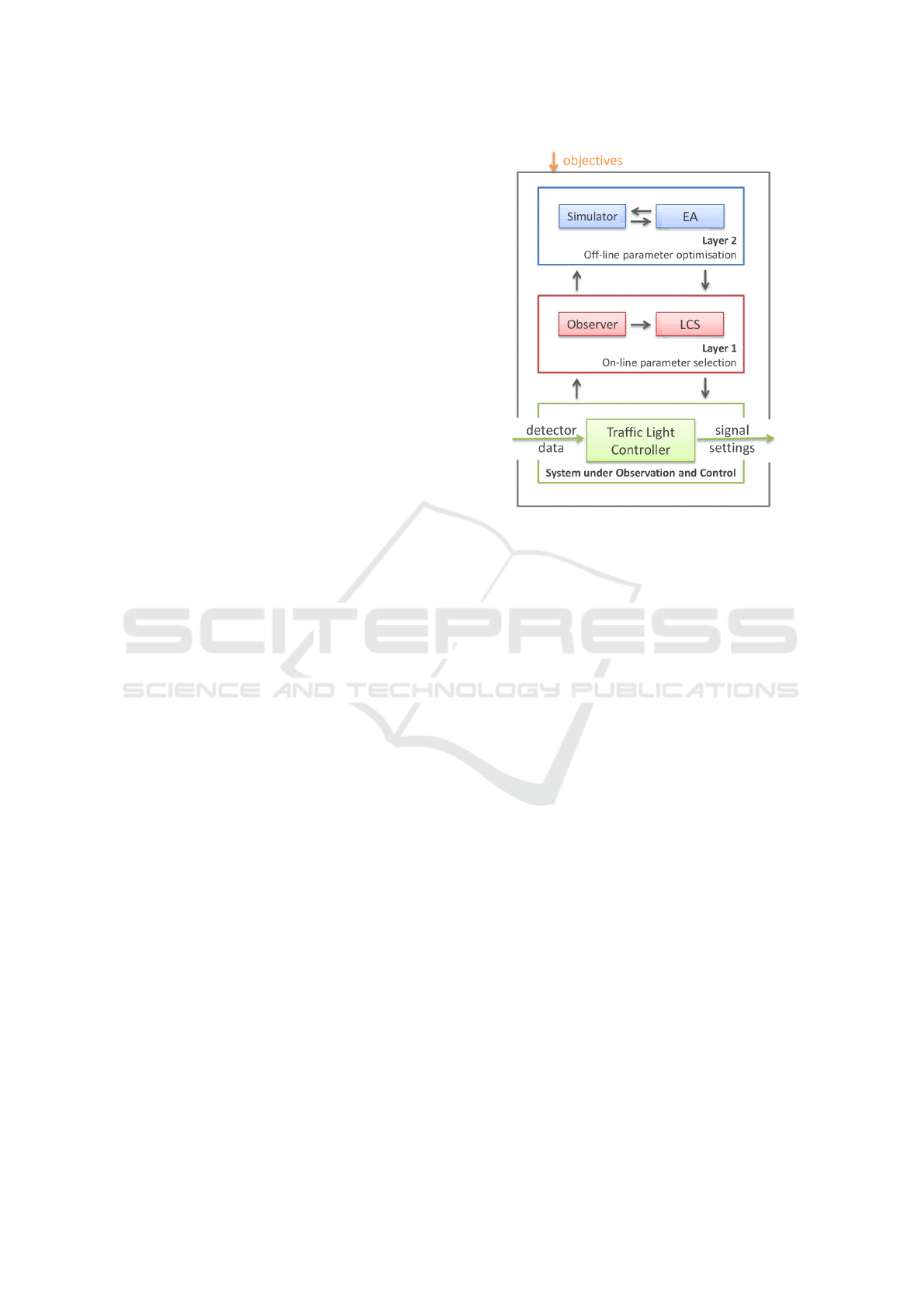
The OTC system adheres to the Ob-
server/Controller paradigm (Tomforde et al., 2011).
Figure 1 shows how it is realised as multi-level
architecture on top of the “System under Control
and Observation” (SuOC), the actual (simulated)
road network. The detector readings are retrieved
and processed in the observer of “online” Layer 1
to create an abstract state of the underlying traffic
conditions. This state description is used by the
controller component which employs reinforcement
learning to modify the traffic signalisation accord-
ingly. Here, a Learning Classifier System is used,
namely a variant of Wilson’s “Extended Classifier
System” (XCS) (Wilson, 1995). When Layer 1
is faced with previously unknown situations, the
“offline” Layer 2 is activated: It uses an evolutionary
algorithm to create new rules for the XCS which are
evaluated using a traffic simulator (Aimsun, 2021).
Figure 1: Overview of the multilevel OTC architecture.
2.3 Traffic Incident Detection
The OTC serves as a basis for the “Automated Inci-
dent Detection” (AID). Approaches to this have been
researched since the seventies. They often rely on
loop detectors. For instance, the California Algo-
rithm family (Payne, 1975; Payne and Tignor, 1978)
follows decision tree structures based on thresholds.
Later techniques may use time series analysis (Ahmed
and Cook, 1980), filtering and smoothing-based algo-
rithms (Stephanedes and Chassiakos, 1993), mathe-
matical traffic-flow-model-based algorithms (Lin and
Daganzo, 1997), or the usage of probe vehicles to esti-
mate traffic flows (Jenelius and Koutsopoulos, 2013).
There are common limitations to the above as they
are designed for highways, rely on previously mea-
sured travel times, or do not differentiate the incidents
types. To compensate for this, we proposed a novel
clustering-based approach for AID in urban road net-
works (Thomsen et al., 2021b): Induction loop read-
ings are analysed in the form of time series data.
With clustering techniques, such as DBSCAN(Ester
et al., 1996), significant traffic flow changes can be
detected. We demonstrated that especially for traf-
fic demand, appropriate detection accuracy can be
achieved.
Distributed Collaborative Incident Validation in a Self-Organised Traffic Control System
153
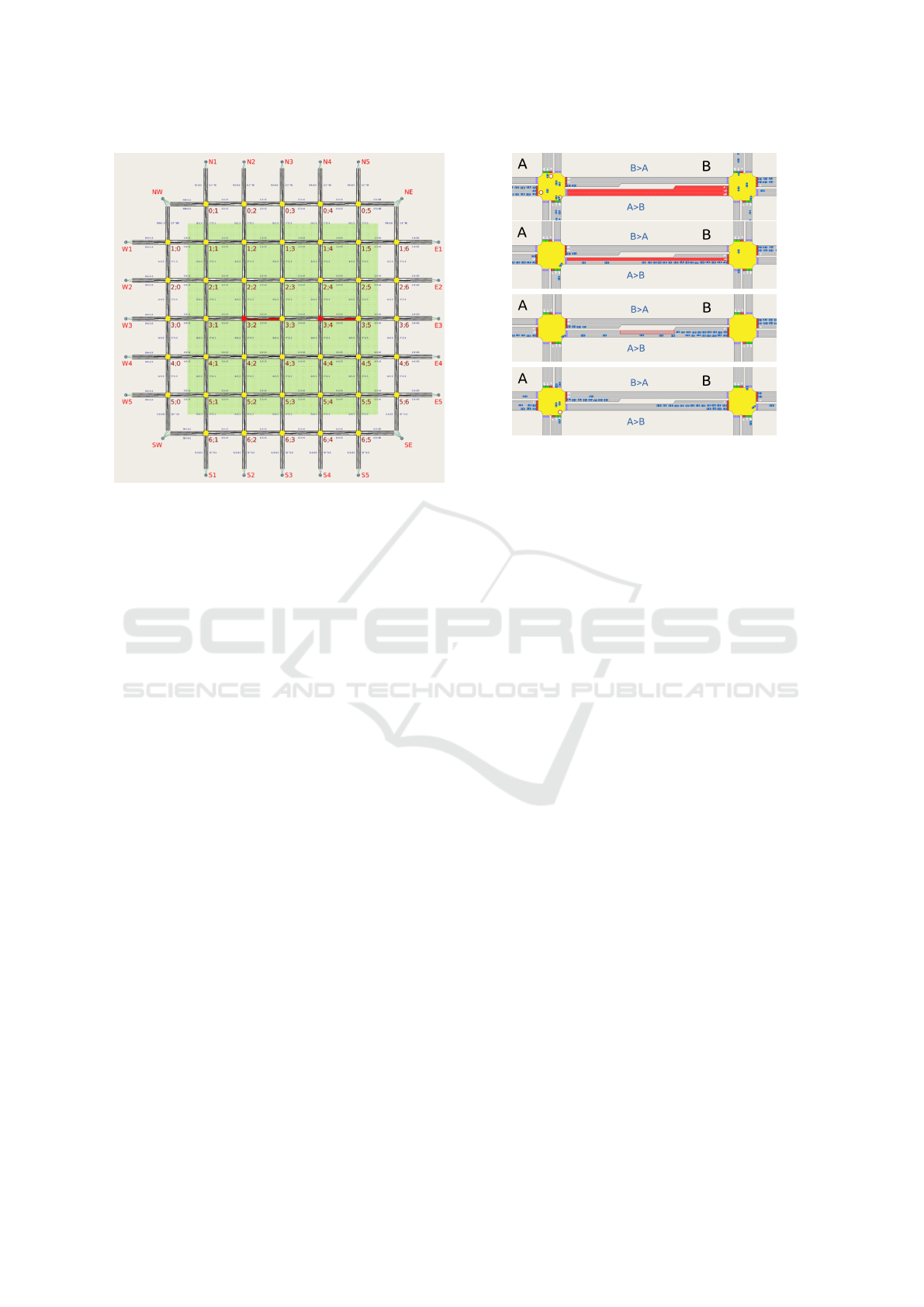
Figure 2: A 7x7-Manhattan grid with two exemplary in-
cidents (marked in red) as simulated using Aimsun. The
green area marks the junctions where the TLCs are con-
trolled by the OTC.
3 ROAD NETWORK AND
INCIDENT MODEL
The traffic simulator Aimsun Next ((Aimsun, 2021))
is accepted as a realistic model and provides close-to-
reality simulations of the road networks and incidents.
3.1 Urban Road Networks
The approaches in Section 4 partly rely on the topol-
ogy around a junction which is about to validate a
locally reported incident. Here, the junctions in the
regular Manhattan network Fig. 2 have 4 neighbours
and are equipped with TLCs with a phase-based sig-
nalisation. The connecting double-lane sections have
detectors at both ends.
3.2 Incidents
A traffic incident is an event of a certain duration
which changes the traffic capacity of a road, such as
depicted in Fig. 3: (SC) complete closing of a sec-
tion in one direction, (LC) closure of one full-length
lane in a multi-lane section, (PLC) partial blockage
of a lane, and (TC) blocking of a turning within an
intersection. Albeit no traffic incident in itself, the
detection validation can be used to recognise certain
technical defects at a junction (e.g. loss of function of
a traffic light or a detector).
Figure 3: The simulated incident types under consideration:
section closure (SC), lane closure (LC), partial lane closure
(PLC), and turn closure (TC).
3.3 Incident Detection
The proposed validation is not based on a specific ap-
proach to incident detection. The actual mechanism
is expected to provide for each incident the informa-
tion i = (type,t, c, pos), where type denotes one of
the 4 incident types, t the start time, c the confidence,
and pos the position proposed by the detection. With
regard to type and pos, the following 3 knowledge
levels (KL) can be distinguished:
1. KL: Neither incident type nor location is known:
There is some kind of incident at this junction.
2. KL: The location is known (the specific section or
the turn in case of a turn closure).
3. KL: Additionally, the incident type is known.
4 VALIDATION APPROACH
The proposed approaches are decentralised in that
a “consensus service” at each controlled junction
uses local information on detected incidents (see Sec-
tion 3.3). This service is managed by a “consensus
controller” which is able to communicate with adja-
cent counterparts about detected incidents. A prob-
ability p is always included with a validation result:
( f alse, p) for a false positive and (true, p, pos, type)
otherwise. The different algorithms take a possible
“associated incident” into account. Figure 4 illus-
trates such a concurrent incident, where the consen-
sus service in 1 has been notified about a closure of
section A towards 2. Simultaneously, a closure of the
downstream section B originating at 2 will be an as-
VEHITS 2023 - 9th International Conference on Vehicle Technology and Intelligent Transport Systems
154

1 2
3
4
A
B
C
Figure 4: Example of an associated incident. If there is an
incident in section A, an incident in B would be an associ-
ated incident, an incident in C would not.
sociated incident. The first two algorithms mainly
work with thresholds, while the other two employ
case distinctions and thresholds. Also, not all algo-
rithms work at all knowledge levels.
The thresholds are chosen with regard to the topol-
ogy of the road network. In the case of the Manhat-
tan grid with 4 neighbouring junctions for each con-
sensus controller, the thresholds and case distinctions
are based on assumptions: neighbouring incidents can
be used to confirm locally reported incidents. The
thresholds are then chosen as estimates which can be
optimised, e.g. using a grid search or machine learn-
ing techniques, such as reinforcement learning.
4.1 Algorithm 1
The first basic algorithm works only for KL 1. For
this reason, it only decides whether the reported in-
cident I
0
with its confidence c
0
is regarded a true or
false positive with a certain probability. Possibly, the
directly adjacent services are queried for any associ-
ated incidents and respective confidences. This low-
complexity approach uses the thresholds θ
a
= 0.8 and
θ
2
= 0.65 to reach a consensus in two steps.
1. If c
0
> θ
a
the confidence is high enough on its
own. It is used as the resulting probability for the
direct successfully validated incident (true,c
0
).
2. Otherwise, the consensus service asks all its adja-
cent neighbours for incidents which are combined
as I and their confidences C. Two cases can occur:
(a) At least one neighbouring incident has a confi-
dence higher than θ
a
and the highest one, c
max
,
is used to calculate the probability of the suc-
cessfully validated incident: (true,
c
0
+c
max
2
)
(b) Otherwise, all confidences c
i
< θ
a
are com-
bined as p
c
=
1
|I|
∑
i
c
i
and the result is either
(true, p
c
) if p
c
> θ
b
or (true, 1 − p
c
).
4.2 Algorithm 2
This extension of the Algorithm 1 can validate an in-
cident at KL 3 by collecting all associated incidents
as set I and draw conclusions based on the confidence
Require: incident i to be validated
Require: I = set of N received incidents
Require: associated incident confidences c
1: if ∃ j ∈ I| j
pos
== i
pos
then
2: p
a
=
c
i
+c
j
2
3: if p
a
> θ
a
then
4: return (true, p
a
, pos,type)
5: else
6: return ( f alse, 1 − p
a
)
7: end if
8: else
9: p =
1
N
∑
I
c
10: if N = i ∧ p < θ
i
then
11: return (true, p, pos, type)
12: else
13: return ( f alse, 1 − p)
14: end if
15: end if
Figure 5: Pseudocode for Algorithm 2.
values. Based on the number of incidents N = |I|, the
thresholds are: Θ = [θ
a
= 0.8, θ
0
= θ
1
, . . . , = θ
N
=
0.65] For Manhattan-like networks (Fig. 2) with 4
neighbouring junctions, this results in 6 thresholds.
Figure 5 outlines the concept: If a neighbour reports
sufficient incidence confidence compared to θ
a
, a lo-
cal incident is validated. Otherwise, the combined
confidence of all N neighbouring incidents is com-
pared to the respective threshold θ
n
.
4.3 Algorithm 3
The third algorithm can classify an incident at knowl-
edge levels 1 and 2. The basic idea of this (as well
as the following) algorithm is to create a conclusion,
based on all possible responses from the neighbour-
ing controllers. The potential number of responses
is very high, but it is possible to limit these to inci-
dents (a) within a junction on a turning to or from the
connected section or (b) on any incoming or outgoing
(including the connected) section.
This reduction is possible because the conse-
quences for the algorithm described below are al-
ways the same. Moreover, only associated incidents
are taken into account, causing a large portion of re-
sponses to drop out. Three different positions (see
Fig. 6) relative to the local controller are considered
when drawing “conclusions”: the section between the
local and the responding controller, in a turning in the
associated intersections, and in one of the sections
which is not between the local and the responding
controller.
Distributed Collaborative Incident Validation in a Self-Organised Traffic Control System
155
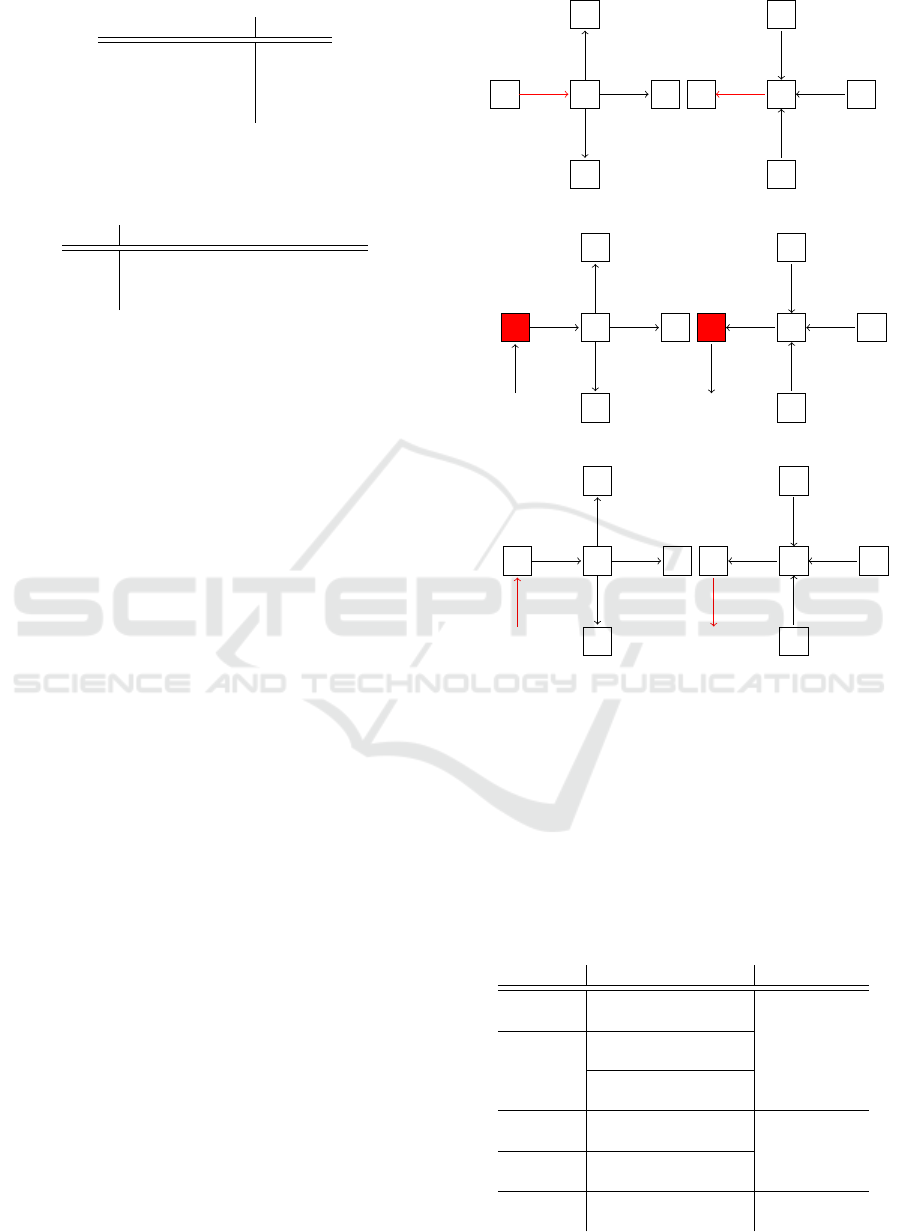
Table 1: Weighting of the conclusions used in Algorithm 3.
Conclusion Effect e
Confirmation 1
Weak Confirmation 0.5
No Consequence 0
Possible defect 0
Table 2: Results for Algorithm 3based on the reported con-
fidence c and the cumulative effect E.Note that type is “un-
known” here, as this algorithm does not work at KL 3.
E Validation Result
0 ( f alse,1 − c)
]0, 1] (true, min(1, c × 1.25), pos,type)
> 1 (true, min(1, c × 1.5), pos, type)
Conclusions and Procedure
The potential conclusions drawn from these cases and
their effects are listed in Table 1. For now, “Possible
Defect” is handled as “No Consequence”, but will be
investigated as part of future work. Again, the consen-
sus controller asks its direct neighbours about possi-
ble incidents. The number of answers N is at most 4.
Based on the incident positions, the effects e
n
of these
conclusions are summarised as effect E =
∑
N
e
n
. This
can be at most θ
max
= 4 due to the maximum number
of junction controllers. Using E and the case distinc-
tion in Table 2, the final validation is determined.
Positions
In the case of position 1, the incident is located on
the incoming or outgoing section between the local
and the responding consensus controller 2. Table 3
outlines the respective conclusions.
Position 2 is an incident within the junction. This
corresponds to a turning closure (see Figs. 6c and 6d).
For both directions, the answer from controller 2 is
the same: An incident on section A detected by 2 al-
ways yields “Weak Confirmation”.
The position 3 corresponds to an incident on one
of the sections that are not between the local and the
responding consensus controller as with position 1.
Again, the incident can be on the incoming (Fig. 6e)
section A or on the outgoing (Fig. 6f) section A. In
both cases, the reaction of controller 2 is negligible,
yielding the conclusion “No Consequence”.
4.4 Algorithm 4
This extension of Algorithm 3 can also validate inci-
dents at KL 3 and take the incident type into account.
This multiplies the possible consequences. The con-
clusions are drawn from reported incidents of neigh-
bouring controllers (the weighting effect in Table 4).
1 2
3
4
5
A
B
C
D
(a) outgoing section
1 2
3
4
5
A
B
C
D
(b) incoming section
1 2
3
4
5
E
A
B
C
D
(c) turning from E to A
1 2
3
4
5
E
A
B
C
D
(d) On turning from A to E
1 2
3
4
5
A
B
C
D
E
(e) section A to 1
1 2
3
4
5
A
B
C
D
E
(f) section A from 1
Figure 6: Three incident positions reported by 1 in relation
to questioned neighbour 2: an (1) incident on the outgoing
or the incoming section between both controllers, a (2) clo-
sure of the turning between E and A in either direction and
a (3) incident which is not the section in case (1).
Table 3: Conclusions for Algorithm 3 at position 1 with an
reported incident at consensus controller 1. It can be ei-
ther on the incoming (Fig. 6a) or the outgoing section A
(Fig. 6b). The conclusions are based on the answer from
controller 2 – for instance, a turning closure (TC) or inci-
dents of unknown type on section A.
Location Answer from 2 Conclusion
incoming Incident on
outgoing section
Incident on Weak
outgoing incoming section Confirmation
TC from A to an
outgoing section
incoming TC from an outgoing
section to A Confirmation
both Incident on
section A
both Nothing Possible
defect at 1
VEHITS 2023 - 9th International Conference on Vehicle Technology and Intelligent Transport Systems
156
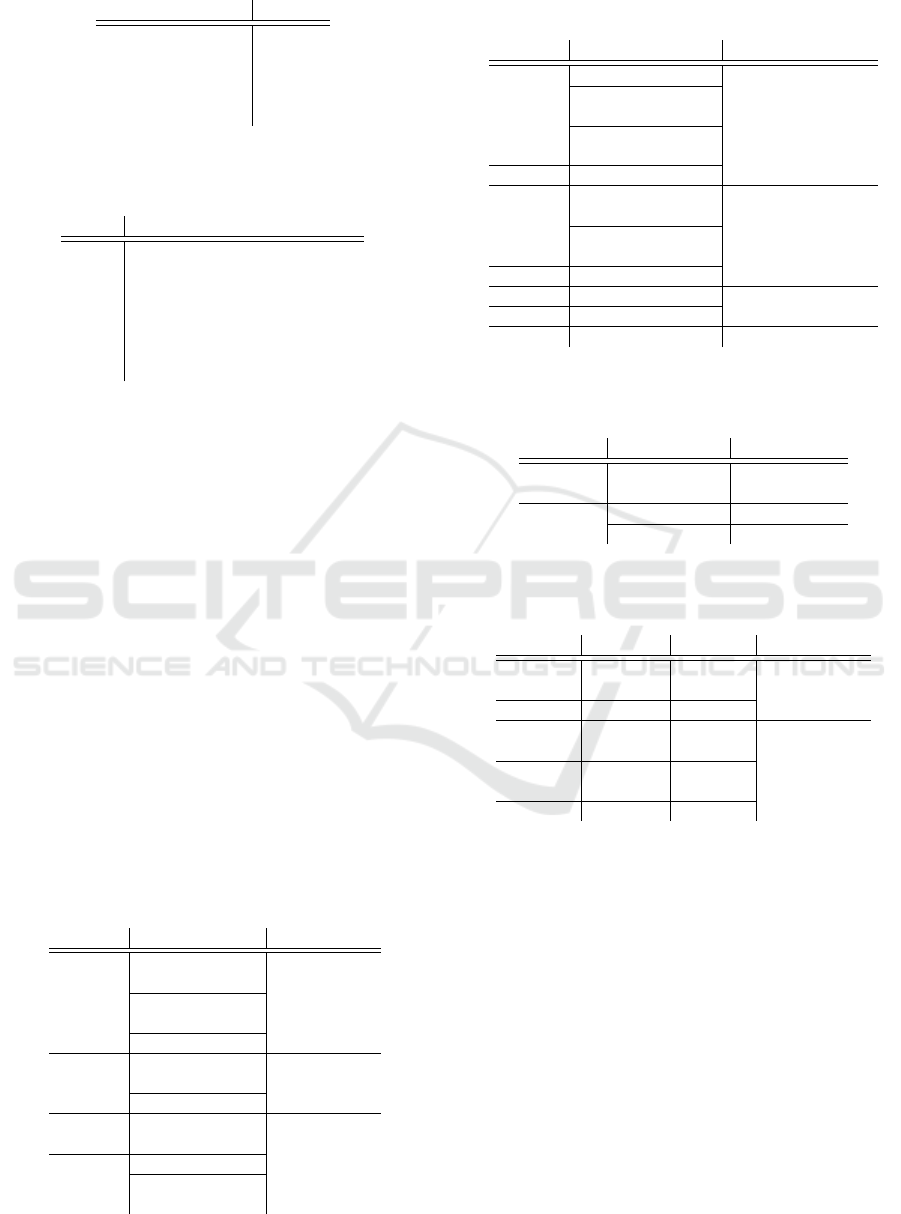
Table 4: Weighting of the conclusions used in Algorithm 4.
Conclusion Effect e
Confirmation 1
Weak Confirmation 0.5
No Consequence 0
Contradiction -1.0
Possible defect 0
Table 5: Resulting output of Algorithm 4 based on the re-
ported confidence and on the cumulative effect E of the con-
clusions which are also considered the incident type.
E Validation Result
< 0 ( f alse,1)
= 0 (true, c, pos, type)
= 0.5 (true, c × 1.25, pos, type)
= 1 (true, min(1, c × 1.5), pos, type)
]1, 2] (true, min(1, c × 1.6), pos, type)
]2, 3] (true, min(1, c × 1.7), pos, type)
> 3 (true, min(1, c × 1.8), pos, type)
A new conclusion “Contradiction” can occur. Again,
a combined effect E =
∑
N
e
n
of the consequences is
used for the final validation in Table 5.
The conclusions are based on the incident position
reported in relation with the consensus controller be-
ing questioned (see Fig. 6). For the first case, Tables 6
and 7 show the conclusions for an incident (incoming
or outgoing section). For the second case of a turn-
ing in the local controller, the possible conclusions
are outlined in Table 8. Lastly, the incident can be
in the sections which are not between consensus con-
trollers 1 and 2 (Figs. 6e and 6f). Table 9 shows the
possible conclusions.
5 EVALUATION
To evaluate the basic substantially of the validation
approaches outlined in Section 4, the functionality of
Table 6: Conclusions for Algorithm 4 at position 1 (see
Figs. 6a and 6b) The incident abbreviations correspond to
the incidents described in Section 3.2.
Incident Answer Conclusion
TC in 2 to
SC, outgoing section
LC, SC on Confirmation
PLC outgoing section
LC on A
LC, PLC on
SC outgoing section Weak
LC, PLC on A Confirmation
LC SC, PLC on
A or Nothing Possible
PLC on A defect
PLC SC on A at 2
or Nothing
Table 7: Conclusions for Algorithm 4 at position 1 (see
Fig. 6a). An incident is reported by consensus controller
1 on an outgoing section towards controller 2.
Incident Answer Conclusion
SC on A
LC, PLC on
SC, outgoing section Confirmation
LC TC in 2 to
outgoing section
PLC SC, LC, PLC on A
TC in 2 to
PLC outgoing section
LC, PLC on Weak
outgoing section Confirmation
LC PLC on A
SC LC, PLC on A Contradiction
LC SC on A
SC, LC Nothing Possible defect at 1
Table 8: Conclusions for Algorithm 4 at position 2 (see
Fig. 6b). A turn closure towards or from section A is found
at consensus controller 1 .
Direction Answer Conclusion
from SC, LC, Weak
PLC on A Confirmation
towards LC, PLC on A Confirmation
SC on A Contradiction
Table 9: Conclusions for Algorithm 4 at position 3 (see
Figs. 6e and 6f). An incident is reported by consensus con-
troller 1 on an incoming or outgoing section.
Incident Location Answer Conclusion
SC, LC incoming LC, PLC
on B Confirmation
LC outgoing TC to B
PLC incoming LC, PLC
on B
LC, PLC outgoing SC, LC, Weak
PLC Confirmation
PLC outgoing TC to B
the consensus controller was implemented as part of
the OTC system. It was then evaluated using an “em-
ulation service” which executed all algorithms on ar-
tificially created test and validation cases of detected
incidents. In particular, we introduce artificial inci-
dents in OTC/Aimsun and use the knowledge regard-
ing the type, characteristics, etc. to assess the correct-
ness and success of the validation algorithms.
5.1 Evaluation Data
The artificial evaluation data are created with two
goals in mind: The system should correctly detect
false positives as well as all cases from the case dis-
tinctions of Algorithm 4 (Section 4.4). Six sets of data
(see Table 10) were created: Two sets are based on the
Distributed Collaborative Incident Validation in a Self-Organised Traffic Control System
157
Table 10: The 6 evaluation datasets with a short descrip-
tion and the number of test cases. Sets 4 to 6 represent the
“assumed” normal or randomly varying confidences. Sec-
tion 5.2 describes the sets in more detail.
Set Content Tests
1 No responses from 140
neighbouring services
2 Responses from second level 420
neighbouring services
3 Normal confidence values 80
4 Confidence values varying by 10% 80
5 Confidence values varying by 15% 80
6 Confidence values varying by 20% 80
Table 11: Exemplary datasets for occurring incidents: 2 sec-
tions closures which are to be (a) validated or (b) not, as
well as a turning closure (c) which should not be validated.
(a) (b) (c)
type SC SC TC
time 1 2 3
location 3;3 > 4 3; 3 > 4 2; 5 ≫ 1; 4
confidence 1 0.1 1
controller 3;4 3; 4 2; 4
Expected Output
decision true false true
location 3;3 > 4 2;5 ≫ 1; 4
type SC TC
false positives, and four sets with varying confidence
values cover the assumptions of Algorithm 4. The
confidence values were chosen under the assumption
that the detection of a complete closure is straight-
forward: section closures (0.9), lane closures (0.6),
partial lane closures (0.3), and turn closures (0.8).
The sets were created using the emulation service
and the 7x7 Manhattan grid (Fig. 2) as a basis. Ta-
ble 11 shows some example evaluation cases for the
data of the incident. Depending on the knowledge
level, the “expected location” or “expected type” is
redundant.
5.2 Test Sets
For every case in Section 4 where responses from
neighbours are expected, each test set contains at least
one corresponding dataset. This response covers the
incident type, time, location and confidence, as well
as other aspects of the algorithms:
1. 20 junctions were randomly selected and three in-
cidents were generated for each. An incoming and
an outgoing section are randomly selected and a
section closure, a lane closure and a partial lane
closure are created respectively. A closure is gen-
erated for a randomly selected turning movement.
2. Again, 20 junctions were selected including
second-level neighbours for each. Each selected
Table 12: Results for running each algorithm on all 6 test
sets. The columns of the far right list the correctly validated
cases, when the Algorithm 1 to 4 was applied.
Set Cases 1 2 3 4
1 140 100 40 119 0
2 280 288 108 351 0
3 80 42 45 32 80
4 80 43 47 37 80
5 80 42 48 39 80
6 80 42 46 30 80
neighbour responds to either a section closure, a
lane closure, or a partial lane closure incident. For
each, a corresponding (from the point of view of
the neighbour) incident is generated.
3. Based on the case distinctions of Algorithm 4
(Section 4.4), occurring incidents and correspond-
ing responses were created.
4. This set is similar to the one above, with the con-
fidence values randomly varied by ± 10%.
5. This set is similar to the one above, with the con-
fidence values randomly varied by ± 15%.
6. This set is similar to the one above, with the con-
fidence values randomly varied by ± 20%.
5.3 Results and Discussion
The results in Table 12 show the unpredictable be-
haviour of Algorithms 1, 2 and 3, when used on
datasets which are based on case distinctions: The
confidence fluctuation in the last four sets should af-
fect the predictability of the outcome. For example,
the confidence of set 4 for a section closure could drop
to 70%, yet the expected result is still a validated in-
cident (while it is more likely a false positive). Still,
Algorithm 4 reaches the expected 100% for sets 3 to
6, while the others validate 30 to 50 cases per set.
As the tests are artificially created and the thresh-
olds are just estimated, the validity of this evaluation
is not high. Also, the conclusions are based on as-
sumptions regarding the simulation behaviour. How-
ever, the results demonstrate the potential to work:
All four algorithms provide outcomes characterised
by the different knowledge levels. Furthermore, a
perfect classification might not be achievable in real-
world environments, due to the trade-off between re-
action or classification time and accuracy. This is es-
pecially due to the fact that the longer a traffic pattern
is observed, the less is the impact of short-time fluc-
tuations. With this in mind, the current approach aims
at an as-fast-as-possible reaction. It is a basis for sub-
sequent consideration in the traffic control strategies.
VEHITS 2023 - 9th International Conference on Vehicle Technology and Intelligent Transport Systems
158

6 CONCLUSIONS
This work outlined a generic approach for a collabo-
rative validation of locally detected incidents in sim-
ple urban road networks. The network topology is
taken into account as well varying degrees of knowl-
edge about the detected incidents. Integrated into the
OTC, the approaches showed potential to improve the
accuracy and resulting success of local incident detec-
tion. As a limitation, the evaluation is based only on
assumptions about the underlying AID.
This is a first attempt at an improved detection in
OTC and next steps can be outlined: An evaluation
with real (simulated) traffic and incident situations.
Also, the AID must be carried out by the OTC as out-
lined in Section 2. Finally, the various threshold must
be optimised, e. g., by using machine learning tech-
niques. All this will multiply the test cases and possi-
ble conclusions dramatically which make a complete
test scenario unfeasible. Finally, the reinforcement
learning capabilities of the OTC should be applied,
to ensure the SASO capabilities of the system.
ACKNOWLEDGEMENTS
This research was supported by the Deutsche
Forschungsgemeinschaft, DFG, in the context of the
project “Zwischenfall-bewusstes resilientes Verkehrs-
management f
¨
ur urbane Straßennetze (InTURN)” un-
der grant TO 843/5-1. We acknowledge this support.
REFERENCES
Ahmed, S. and Cook, A. (1980). Time series models for
freeway incident detection. Transp. Eng. J of the Am.
Soc. of Civ. Eng., 106(6):731–745.
Aimsun (2021). Aimsun Next 20 User’s Manual, Aimsunm
Next 20.0.3 edition. Accessed on: October, 22, 2021.
Ester, M., Kriegel, H.-P., Sander, J., and Xu, X. (1996).
A density-based algorithm for discovering clusters in
large spatial databases with noise. In AAAI Press,
pages 226—-231.
Gokulan, B. and Srinivasan, D. (2010). Distributed geomet-
ric fuzzy multiagent urban traffic signal control. IEEE
Trans. on Int. Transportation Sys., 11(3):714–727.
Jenelius, E. and Koutsopoulos, H. (2013). Travel time esti-
mation for urban road networks using low frequency
probe vehicle data. Transp. Res. Part B: Methodolog-
ical, 53:64–81.
Lin, W. and Daganzo, C. (1997). A simple detection scheme
for delay-inducing freeway incidents. Transp. Res.
Part A: Policy and Practice, 31(2):141–155.
Mauro, V. and Taranto, C. D. (1990). Utopia. Control,
computers, communications in transportation.
M
¨
uller-Schloer, C. and Tomforde, S. (2017). Organic
Computing-Technical Systems for Survival in the Real
World. Springer.
Oliveira, L. D. and Camponogara, E. (2010). Multi-agent
model predictive control of signaling split in urban
traffic networks. Transp. Res. Part C: Emerging Tech.,
18(1):120–139.
Payne, H. and Tignor, S. (1978). Freeway incident-
detection algorithms based on decision trees with
states. Transportation Research Record.
Payne, H. J. (1975). Freeway incident detection based upon
pattern classification. In Proc. of IEEE Conf. on Deci-
sion and Control, volume 14, pages 688–692. IEEE.
Prothmann, H., Branke, J., Schmeck, H., Tomforde, S.,
Rochner, F., H
¨
ahner, J., and M
¨
uller-Schloer, C.
(2009). Organic traffic light control for urban road net-
works. Int. J. Auton. Adapt. Commun. Syst., 2(3):203–
225.
Robertson, D. and Bretherton, D. (1991). Optimizing net-
works of traffic signals in real time – the SCOOT
method. IEEE Trans. on Veh. Tech., 40(1):11–15.
Sims, A. and Dobinson, K. (1980). The Sydney coordinated
adaptive traffic (SCAT) system – Philosophy and ben-
efits. IEEE Trans. on Veh. Tech., 29(2):130–137.
Sommer, M., Tomforde, S., and H
¨
ahner, J. (2016). Forecast-
augmented route guidance in urban traffic networks
based on infrastructure observations. In Proceedings
of the International Conference on Vehicle Technol-
ogy and Intelligent Transport Systems, VEHITS 2016,
Rome, Italy, April 23-24, 2016, pages 177–186.
Stephanedes, Y. and Chassiakos, A. (1993). Freeway inci-
dent detection through filtering. Transp. Res. Part C:
Emerging Technologies, 1(3):219–233.
Thomsen, I., Zapfe, Y., and Tomforde, S. (2021a). Urban
traffic incident detection for organic traffic control: A
density-based clustering approach. In Vehits, pages
152–160.
Thomsen, I., Zapfe, Y., and Tomforde, S. (2021b). Urban
traffic incident detection for organic traffic control: A
density-based clustering approach. In Proceedings of
the 7th International Conference on Vehicle Technol-
ogy and Intelligent Transport Systems, VEHITS 2021,
Online Streaming, April 28-30, 2021, pages 152–160.
Tomforde, S., Prothmann, H., Branke, J., H
¨
ahner, J., Mnif,
M., M
¨
uller-Schloer, C., Richter, U., and Schmeck, H.
(2011). Observation and control of organic systems.
In Organic Computing—A Paradigm Shift for Com-
plex Systems, pages 325–338. Springer.
Tomforde, S. and Thomsen, I. (2022). A concept for col-
laborative incident validation in a self-organised traf-
fic management system. In Proceedings of the 8th
International Conference on Vehicle Technology and
Intelligent Transport Systems, VEHITS 2022, Online
Streaming, April 27-29, 2022, pages 316–323.
Vincent, R., Peirce, J., and Webb, P. (1990). Mova traffic
control manual. MOVA reports.
Wilson, S. W. (1995). Classifier Fitness Based on Accuracy.
Evolutionary Computation, 3(2):149–175.
Distributed Collaborative Incident Validation in a Self-Organised Traffic Control System
159
