
Generating Pedestrian Views from In-Vehicle Camera Images
Daina Shimoyama, Fumihiko Sakaue and Jun Sato
Nagoya Institute of Technology, Nagoya 466-8555, Japan
{shimoyama@cv., sakaue@, junsato@}nitech.ac.jp
Keywords:
GAN, Semantic Segmentation, Multi-Task Learning, Pedestrian Views, In-Vehicle Camera.
Abstract:
In this paper, we propose a method for predicting and generating pedestrian viewpoint images from images
captured by an in-vehicle camera. Since the viewpoints of an in-vehicle camera and a pedestrian are very
different, viewpoint transfer to the pedestrian viewpoint generally results in a large amount of missing infor-
mation. To cope with this problem, we in this research use the semantic structure of the road scene. In general,
it is considered that there are certain regularities in the driving environment, such as the positional relationship
between roads, vehicles, and buildings. We generate accurate pedestrian views by using such structural infor-
mation on the road scenes.
1 INTRODUCTION
In recent years, many methods have been proposed to
predict the behavior of pedestrians on roads for avoid-
ing car accidents and for realizing autonomous driv-
ing.
The standard method for predicting the route of a
pedestrian is to use RNNs and LSTMs (Alahi et al.,
2016). The orientation of the pedestrian’s head and
the scene structures are also used for improving the
accuracy of route prediction (Lee et al., 2017; Yagi
et al., 2018).
Furthermore, it is expected that the accuracy of
pedestrian behavior prediction can be further im-
proved by using visibility information that indicates
what kind of scenery the pedestrian is looking at. For
example, if there is a pedestrian crossing in front of a
pedestrian’s view, we can predict that the pedestrian
is likely to head there to cross the street. Thus, in this
paper, we propose a method to predict and generate
what kind of scenery the pedestrians are seeing from
each viewpoint based on the camera images mounted
on the vehicle.
The viewpoint transfer can be achieved by first
converting the in-vehicle image to a pedestrian view-
point image, and then inpainting the missing parts in
the converted image. Since the 3D structure of the
scene is required for viewpoint transfer, we obtain the
depth information of each point in the image using
a depth estimation method based on monocular im-
ages (Godard et al., 2019), and then transfer the in-
vehicle image to an arbitrary pedestrian viewpoint im-
age.
(a) in-vehicle image (b) pedestrian
viewpoint image
Figure 1: Viewpoint transfer with depth estimation. The
viewpoint-transformed image in (b) contains a large amount
of missing regions that are not visible in the original camera
image in (a).
Fig. 1 (b) is an example pedestrian viewpoint im-
age obtained by converting the in-vehicle image in
Fig. 1 (a) estimating the depth information from (Go-
dard et al., 2019). As shown in this figure, the gener-
ated image contains a large amount of missing regions
that are not visible from the in-vehicle camera view-
point. Therefore, we need to inpaint the missing parts
in the next step.
In recent years, cGAN-based methods (Mirza and
Osindero, 2014; Isola et al., 2017) have achieved sig-
nificant results in such image transformation tasks.
However, simple image transformation networks can-
not inpaint an image accurately when a large amount
of regions are missing in the image like the image in
Fig. 1 (b). Thus, in this paper, we propose a method to
generate a pedestrian viewpoint image with higher ac-
curacy by simultaneously estimating the scene struc-
ture specific to the road environment.
In general, the road environment has certain reg-
ularities, such as the positional relationship between
Shimoyama, D., Sakaue, F. and Sato, J.
Generating Pedestrian Views from In-Vehicle Camera Images.
DOI: 10.5220/0011736300003417
In Proceedings of the 18th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2023) - Volume 4: VISAPP, pages
385-392
ISBN: 978-989-758-634-7; ISSN: 2184-4321
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
385

roads and vehicles, roads and buildings, and intersec-
tions and pedestrian crossings. Thus, if we can train
the network to learn such regularities, the network
may generate more accurate complemented images.
In this research, we force the network to learn scene
structure recovery as well as image inpainting and to
generate accurate complemented images.
2 RELATED WORK
A common method of viewpoint transfer is to place
multiple cameras around the 3D scene and use these
camera images to generate images from arbitrary
viewpoints by interpolation (Kanade et al., 1997;
ISHIKAWA, 2008; Lipski et al., 2010; Chari et al.,
2012; Sankoh et al., 2018). These methods are used
to generate free viewpoint images, such as in sports
broadcasting. However, these methods require a large
number of cameras densely placed around the scene,
and thus these methods cannot be used in road envi-
ronments.
In order to solve this problem, we consider view-
point transfer from images obtained by a single in-
vehicle camera. Some methods have been proposed
for generating new views from a single viewpoint
image by using geometric transformations, such as
projective transformations (Kazuki Ichikawa and Jun
Sato, 2008). By estimating the scene depth informa-
tion, we can further improve the geometric viewpoint
transfer. Eigen et al. proposed a deep learning-based
method for estimating scene depth from monocular
images (Eigen et al., 2014). An unsupervised learning
method for depth estimation is also proposed by us-
ing a pair of stereo cameras during the network train-
ing (Garg et al., 2016; Godard et al., 2017).
Although the depth information enables us to
transfer the image point in one view to the image point
in a new view, the geometric transformation alone
can only produce image information that exists in the
original image, and it cannot generate images that do
not exist in the original image, such as the image ob-
tained by looking sideways.
In recent years, image inpainting has been devel-
oped as a technique for filling in the missing image
information, and it has been shown that images can be
restored accurately even when many defective pixels
are scattered throughout the image (Bertalmio et al.,
2000; Liao et al., 2021). However, since these image
inpainting methods use the similarity and regularity
of only 2D image features, they require non-defective
pixels to be scattered throughout the image. There-
fore, the existing image inpainting methods do not
work properly when we have large missing regions
like the image in Fig. 1 (b), which are caused by the
difference in viewing direction before and after the
viewpoint transformation.
In order to solve this problem, we in this pa-
per use multi-task learning to simultaneously learn
two tasks, that is inpainting the in-vehicle images
and inferring the structural information of the hidden
scene. Multitask learning is a method that improves
the performance of each task by learning multiple
related tasks at the same time. Examples of multi-
task learning include Faster R-CNN (Ren et al., 2016)
and YOLO (Redmon and Farhadi, 2018), which si-
multaneously perform object class recognition and
object location estimation, and Mask R-CNN (He
et al., 2017), which simultaneously performs seman-
tic segmentation in addition to object recognition
using Faster R-CNN (He et al., 2017). The net-
work structure for multi-task learning can take various
forms depending on the number and types of tasks,
but the basic structure consists of a task-sharing layer
that learns features common to each task and a task-
specific layer that learns features specific to each task.
In this paper, we propose a method for learning
image inpainting and structural inference simultane-
ously by using multi-task learning, and performing
viewpoint transfer based on the inference of the struc-
tural information of the invisible scene.
3 GENERATING PEDESTRIAN
VIEWPOINT IMAGE
In this research, viewpoint transfer images with miss-
ing regions are complemented using a network based
on conditional GAN (cGAN). However, viewpoint
transfer with significantly different viewpoints can re-
sult in very large missing regions in images. There-
fore, a simple image inpainting method cannot com-
plete missing images with high quality. In this re-
search, we propose a method to generate pedestrian
viewpoint images with high quality by recovering the
scene structure unique to road scenes while perform-
ing image completion. For this objective, we propose
two methods: a method based on multi-task learning
(Method 1) and a method using Semantic Loss with
multi-task learning (Method 2).
3.1 Generating Pedestrian Viewpoint
Images Using Multi-Task Learning
In a road scene, there are objects unique to the road
scene, such as roads, cars, and buildings, each of
which has a similar general shape. In addition, road
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
386

Figure 2: Network structure of method 1. Generator re-
ceives missing RGB images and missing label images, and
outputs generated RGB images that complement missing
RGB images and generated label images that complement
missing label images.
scenes have various unique properties, such as a road
stretching across the bottom of the image and build-
ings likely to line both sides of the road. By learning
these unique properties of road scenes, we can expect
more accurate missing image completion.
The structural information of the scene can be rep-
resented by semantic label images obtained from the
semantic segmentation. However, the semantic label
images obtained from the input missing images also
have missing regions and are incomplete. Therefore,
we propose a method that learns two tasks simultane-
ously, one is a task to complement the missing RGB
images and the other is a task to complement the miss-
ing semantic label images. These two tasks are related
to each other, but are different. The first task focuses
on the scene appearance, while the second task fo-
cuses on the scene structure. By adopting the multi-
task learning of complementing the missing RGB im-
ages and missing label images, it may be possible to
share features for complementing missing informa-
tion and to incorporate structural information of the
scene more efficiently into the learning process. We
call this method 1 in this paper.
The network structure of the proposed method 1
is shown in Fig. 2. The generator receives missing
RGB images and missing label images, and outputs
generated RGB images that complement the missing
RGB images and generated label images that comple-
ment the missing label images. The RGB image pairs
and label image pairs are used as inputs for training,
and the training is performed based on the following
evaluation equation:
G
∗
= argmin
G
max
D
L
cGAN
+ λ
RGB
L
RGB
+ λ
Label
L
Label
(1)
Figure 3: Network structure of method 2. We evaluate the
quality of complemented RGB images by combining se-
mantic loss with adversarial loss to further improve the per-
formance of the generator.
In-vehicle Pedestrian 1 Pedestrian 2
Figure 4: Examples of images obtained from Airsim. We
generated images seen at the same time from in-vehicle
camera viewpoints and various pedestrian viewpoints.
L
cGAN
= E
E
E
x
1
,y
1
[logD(x
1
, y
1
)] +
E
E
E
x
1
,x
2
,z
[log(1 − D(x
1
, G
1
(x
1
, x
2
, z)))] (2)
L
RGB
= E
E
E
x
1
,x
2
,y
1
,z
[||y
1
− G
1
(x
1
, x
2
, z)||
1
] (3)
L
Label
= E
E
E
x
1
,x
2
,y
2
,z
[−
∑
C
y
2
logG
2
(x
1
, x
2
, z)] (4)
where x
1
is the missing RGB image, x
2
is the missing
label image, y
1
is the target RGB image, y
2
is the tar-
get label image, and z is the input noise. G
1
(x
1
, x
2
, z)
is the complemented RGB image generated by G, and
G
2
(x
1
, x
2
, z) is the complemented label image gener-
ated by G. Note that x
2
and y
2
are generated from x
1
and y
1
by using PSPNet (Zhao et al., 2017).
3.2 Generation of Pedestrian Viewpoint
Images Using Semantic Loss
We next explain a method for further improving
the generated pedestrian viewpoint images by using
semantic loss. Since the viewpoint transformation
causes a large amount of missing regions in the im-
age, it is very difficult to evaluate the complemented
image. Thus, we evaluate the quality of the com-
plemented RGB image by combining a semantic loss
with an adversarial loss to further improve the perfor-
mance of the generator. We call this Method 2.
The network structure of the proposed method 2
is shown in Figure 3. The generator takes a missing
RGB image and a missing label image as inputs, and
outputs a complemented RGB image and a comple-
mented label image. The complemented RGB image
Generating Pedestrian Views from In-Vehicle Camera Images
387

is then input to the pre-trained PSPNet to perform se-
mantic segmentation, and the L1 norm of the obtained
semantic label image and its ground truth image is
added as the semantic loss. Since the semantic loss
evaluates the structural correctness of the generated
RGB images, it constrains the generated RGB images
based on higher-level evaluations, and we can expect
better training of the generator.
The following evaluation equations are used to
train the generator in Method 2.
G
∗
= argmin
G
max
D
L
cGAN
+ λ
RGB
L
RGB
+ λ
Label
L
Label
+λ
Sem
L
Sem
(5)
L
cGAN
= E
E
E
x
1
,y
1
[logD(x
1
, y
1
)] +
E
E
E
x
1
,x
2
,z
[log(1 − D(x
1
, G
1
(x
1
, x
2
, z)))] (6)
L
RGB
= E
E
E
x
1
,x
2
,y
1
,z
[||y
1
− G
1
(x
1
, x
2
, z)||
1
] (7)
L
Label
= E
E
E
x
1
,x
2
,y
2
,z
[−
∑
C
y
2
logG
2
(x
1
, x
2
, z)] (8)
L
Sem
= E
E
E
x
1
,x
2
,y
1
,z
[−
∑
C
G
P
(y
1
)logG
P
(G
1
(x
1
, x
2
, z)]
(9)
where, G
P
(·) represents the label image generated by
PSPNet.
4 DATASET
In order to train the network of the proposed method,
it is necessary to prepare pairs of in-vehicle images
and pedestrian viewpoint images. To create such
pairs, images from two different viewpoints must be
acquired at the same time, but it is very difficult to
obtain a large number of such real image pairs. Thus,
we in this research generate a synthetic image dataset
by using Airsim.
Airsim (Shah et al., 2017) is an outdoor scene sim-
ulator that can simulate vehicle and drone views on a
map built on the Unreal Engine. Airsim can simulate
various conditions such as weather and location, and
can acquire RGB images, depth images, and segmen-
tation images of the scene. In this research, we used
Airsim to obtain images from in-vehicle camera view-
points and various pedestrian viewpoints at the same
time, as shown in Fig. 4, to create paired images for
network training.
5 EXPERIMENTS
We next show the experimental results of the pro-
posed method. We prepared 13,200 pairs of missing
images and ground truth images of various pedestrian
viewpoints as described in the previous section. We
used 12,000 sets as training data and 1,200 sets as test
data, and trained and tested the proposed method. The
learning rate and the number of epochs vary depend-
ing on the proposed method, and we used the values
shown in Table 1 for each method.
We compare our two methods with the existing
method, pix2pix (Isola et al., 2017). The accuracy
of each method is evaluated quantitatively as well as
qualitatively by using synthetic images. We also eval-
uate our method by using real images to show the ef-
ficiency of the network trained with synthetic images.
5.1 Synthetic Image Experiments
We first show the results from synthetic images. Fig. 5
shows the pedestrian viewpoint images obtained from
test in-vehicle images by using the proposed method
and the existing method. From these images, we find
that the objects such as vehicles, buildings, and roads
are generated more accurately by using method 1 and
method 2.
In particular, in the images in the first row of
Fig. 5, we find that method 1 and method 2 clearly
generate the white lines and sidewalks in front of the
road, while the existing method fails to generate the
missing areas in front of the road. In the image in
the third row, we find that method 1 and method 2
generate better images reproducing the boundary line
between the road and the grass, as well as the car.
Furthermore, even when the viewpoints are very dif-
ferent and the information in the input image is very
limited, as in the example in the fifth row, the pro-
posed method can recover the buildings and road re-
gions fairly accurately, while the existing method fails
to recover the scene. This is because the proposed
method recovers semantic label images that represent
the structural information of the scene.
5.2 Accuracy Evaluation
We next evaluate the accuracy of the proposed method
quantitatively. As evaluation metrics, we used LPIPS
(learned perceptual image patch similarity) for the
generated RGB images and mIoU (mean intersection
over union) for the generated label images. We also
evaluated mIoU of label images obtained by inputting
the generated RGB images to PSPNet. Table 2 shows
LPIPS of the generated RGB images, mIoU of gener-
ated label images, and mIoU of label images obtained
from the generated RGB images. These two mIoUs
are indicated by mIoU1 and mIoU2 respectively. The
table shows that the proposed method improves on all
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
388
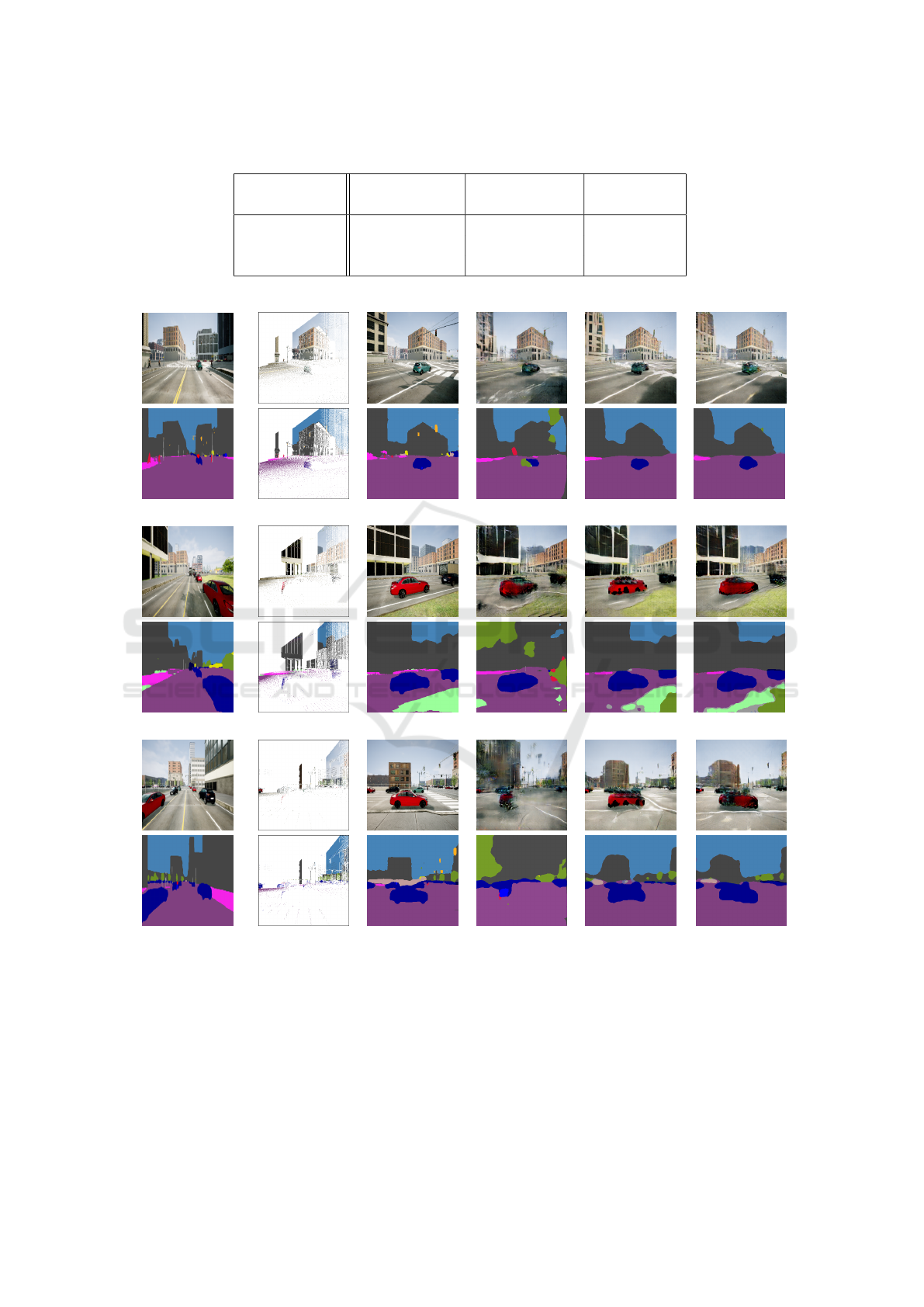
Table 1: Details of learning networks for the proposed method.
Method
Generator
Learning rate
Discriminator
Learning rate
epoch number
existing method 2.0 × 10
−4
1.0 × 10
−6
300
method 1 2.0 × 10
−4
2.0 × 10
−6
400
method 2 2.0 × 10
−4
1.0 × 10
−6
400
In-vehicle Image Input Image GT pix2pix method 1 method 2
Figure 5: Synthetic image experiments. The rightmost three columns show pedestrian viewpoint images and segmentation
images obtained from in-vehicle images in the leftmost column by using the proposed method and the existing method.
metrics compared to the existing method, confirming
the effectiveness of the proposed method.
We next evaluate our method by using pre-trained
YOLO (Redmon and Farhadi, 2018). In this exper-
iment, we evaluated the closeness of the generated
images to the ground truth images by comparing the
detection results of vehicles and person output by pre-
trained YOLO between the ground truth images and
the generated images.
Figure 6 shows the object detection results ob-
tained from YOLO. It is clear that the detection re-
sults for the images generated by method 2 are closer
to the detection results for the ground truth images
than those generated by the existing method. In par-
Generating Pedestrian Views from In-Vehicle Camera Images
389

Table 2: Accuracy of pedestrian viewpoint image generation. We evaluated the accuracy of generated pedestrian viewpoint
images by using LPIPS, and the accuracy of segmentation images by using mIoU (mIoU1). We also evaluated mIoU of label
images obtained by inputting the generated pedestrian viewpoint images to PSPNet (mIoU2).
existing method method1 method2
LPIPS (↓) 0.423 0.356 0.352
mIoU1 (↑) - 0.276 0.368
mIoU2 (↑) 0.1474 0.235 0.366
Input Image GT pix2pix method1 method2
Figure 6: Evaluation of the quality of generated images using YOLO. The rightmost three columns show objects extracted by
using YOLO from images generated by using the proposed method and the existing method.
ticular, YOLO cannot detect several cars in the im-
ages generated by the existing method, whereas it can
detect cars accurately in the images generated by the
proposed method 2. These results show that the pro-
posed method can generate images that are closer to
the ground truth images.
5.3 Real Image Experiments
We next show the results from real images. In this
experiment, we evaluated our method by using 1200
real images in the Cityscapes dataset (Cordts et al.,
2015). We tested our networks and pix2pix trained by
using synthetic images as before.
The second column in Fig. 7 shows the input
missing images viewed from the pedestrian view-
point, which are generated from the in-vehicle images
shown in the first column in Fig. 7 by using the depth
estimation net (Godard et al., 2019). The third column
shows the pedestrian views generated from the exist-
ing method, and the fourth and fifth columns show
those from the proposed method trained on the syn-
thetic images.
These images show that the images generated by
the proposed method with semantic loss reproduce
roads and objects much more accurately than those
by the existing method, even in real images. Espe-
cially, in the images in the second and third rows of
Fig. 7, it can be seen that the proposed method can
predict plausible buildings in the large missing area
where no information exists in the input images. Al-
though the actual images cannot be obtained and the
comparison with the ground truth images is not pos-
sible, we find that the proposed method can generate
realistic images comparable to human imagination.
6 CONCLUSION
In this paper, we proposed a method for generating
pedestrian viewpoint images from in-vehicle images
by using deep learning.
We first proposed a method based on multi-task
learning, which simultaneously learns a task to com-
plement missing RGB images and a task to comple-
ment missing label images. We next extended our
method by adding semantic loss derived by using the
pre-trained semantic segmentation network. We also
constructed the training dataset for our network by
generating synthetic pairs of road environment im-
ages using Airsim simulator.
Experimental results show the effectiveness of the
proposed method using structural information in the
scene. However, since sufficient accuracy has not yet
been obtained for real images, further improvement in
performance is necessary for future work.
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
390

In-vehicle Image Input Image pix2pix method 1 method 2
Figure 7: Real image experiments. The rightmost three columns show pedestrian views obtained from in-vehicle images in
the leftmost column by using the proposed method and the existing method.
REFERENCES
Alahi, A., Goel, K., Ramanathan, V., Robicquet, A., Fei-
Fei, L., and Savarese, S. (2016). Social lstm: Human
trajectory prediction in crowded spaces. In Proceed-
ings of the IEEE conference on computer vision and
pattern recognition, pages 961–971.
Bertalmio, M., Sapiro, G., Caselles, V., and Ballester, C.
(2000). Image inpainting. In Proc. ACM SIG-GRAPH,
pages 417—-424.
Chari, V., Agrawal, A., Taguchi, Y., and Ramalingam, S.
(2012). Convex bricks: A new primitive for visual
hull modeling and reconstruction. In 2012 IEEE In-
ternational Conference on Robotics and Automation,
pages 770–777. IEEE.
Cordts, M., Omran, M., Ramos, S., Scharw
¨
achter, T., En-
zweiler, M., Benenson, R., Franke, U., Roth, S., and
Schiele, B. (2015). The cityscapes dataset. In CVPR
Workshop on The Future of Datasets in Vision.
Eigen, D., Puhrsch, C., and Fergus, R. (2014). Depth map
prediction from a single image using a multi-scale
deep network. Advances in neural information pro-
cessing systems, 27.
Garg, R., Bg, V. K., Carneiro, G., and Reid, I. (2016). Un-
supervised cnn for single view depth estimation: Ge-
ometry to the rescue. In European conference on com-
puter vision, pages 740–756. Springer.
Godard, C., Mac Aodha, O., and Brostow, G. J. (2017).
Unsupervised monocular depth estimation with left-
right consistency. In Proceedings of the IEEE con-
ference on computer vision and pattern recognition,
pages 270–279.
Godard, C., Mac Aodha, O., Firman, M., and Brostow, G. J.
(2019). Digging into self-supervised monocular depth
prediction.
He, K., Gkioxari, G., Doll
´
ar, P., and Girshick, R. (2017).
Mask r-cnn. In Proceedings of the IEEE international
conference on computer vision, pages 2961–2969.
ISHIKAWA, A. (2008). Free viewpoint video generation
for walk-through experience using image-based ren-
dering. ACM Multimedia 2008, Vancouver, Canada,
Oct.-Nov.
Isola, P., Zhu, J.-Y., Zhou, T., and Efros, A. A. (2017).
Image-to-image translation with conditional adversar-
ial networks. In IEEE International Conference on
Computer Vision and Pattern Recognition.
Kanade, T., Rander, P., and Narayanan, P. (1997). Virtu-
alized reality: Constructing virtual worlds from real
scenes. IEEE Multimedia, 4(1).
Kazuki Ichikawa and Jun Sato (2008). Image synthesis for
blind corners from uncalibrated multiple vehicle cam-
eras. In 2008 IEEE Intelligent Vehicles Symposium,
pages 956–961.
Lee, N., Choi, W., Vernaza, P., Choy, C. B., Torr, P. H.,
and Chandraker, M. (2017). Desire: Distant future
prediction in dynamic scenes with interacting agents.
In Proceedings of the IEEE Conference on Computer
Vision and Pattern Recognition, pages 336–345.
Liao, L., Xiao, J., Wang, Z., Lin, C., and Satoh, S. (2021).
Image inpainting guided by coherence priors of se-
mantics and textures. In IEEE International Confer-
ence on Computer Vision and Pattern Recognition.
Lipski, C., Linz, C., Berger, K., Sellent, A., and Magnor,
M. (2010). Virtual video camera: Image-based view-
point navigation through space and time. In Computer
Generating Pedestrian Views from In-Vehicle Camera Images
391

Graphics Forum, volume 29, pages 2555–2568. Wiley
Online Library.
Mirza, M. and Osindero, S. (2014). Conditional generative
adversarial nets. arXiv preprint arXiv:1411.1784.
Redmon, J. and Farhadi, A. (2018). Yolov3: An incremental
improvement. arXiv preprint arXiv:1804.02767.
Ren, S., He, K., Girshick, R., and Sun, J. (2016). Faster
r-cnn: Towards real-time object detection with re-
gion proposal networks. IEEE transactions on pattern
analysis and machine intelligence, 39(6):1137–1149.
Sankoh, H., Naito, S., Nonaka, K., Sabirin, H., and Chen,
J. (2018). Robust billboard-based, free-viewpoint
video synthesis algorithm to overcome occlusions un-
der challenging outdoor sport scenes. In Proceedings
of the 26th ACM international conference on Multi-
media, pages 1724–1732.
Shah, S., Dey, D., Lovett, C., and Kapoor, A. (2017). Air-
sim: High-fidelity visual and physical simulation for
autonomous vehicles. In Field and Service Robotics.
Yagi, T., Mangalam, K., Yonetani, R., and Sato, Y. (2018).
Future person localization in first-person videos. In
Proceedings of the IEEE Conference on Computer Vi-
sion and Pattern Recognition, pages 7593–7602.
Zhao, H., Shi, J., Qi, X., Wang, X., and Jia, J. (2017).
Pyramid scene parsing network. In Proceedings of
the IEEE conference on computer vision and pattern
recognition, pages 2881–2890.
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
392
