
ARTHUR: Machine Learning Data Acquisition System with Distributed
Data Sensors
Niels Schneider
a
, Philipp Ruf, Matthias Lermer and Christoph Reich
b
Institute for Data Science, Cloud Computing and IT Security, Furtwangen University of Applied Science,
Robert-Gerwig-Platz 1, 78120 Furtwangen im Schwarzwald, Germany
Keywords:
Distributed Monitoring System, Machine Learning, Cloud, Data Acquisition, IoT-Cloud Integration.
Abstract:
On the way to the smart factory, the manufacturing companies investigate the potential of Machine Learning
approaches like visual quality inspection, process optimisation, maintenance prediction and more. In order
to be able to assess the influence of Machine Learning based systems on business-relevant key figures, many
companies go down the path of test before invest.
This paper describes a novel and inexpensive distributed Data Acquisition System, ARTHUR (dAta collec-
toR sysTem witH distribUted sensoRs), to enable the collection of data for AI-based projects for research,
education and the industry. ARTHUR is arbitrarily expandable and has so far been used in the field of data
acquisition on machine tools. Typical measured values are Acoustic Emission values, force plate X-Y-Z force
values, simple SPS signals, OPC-UA machine parameters, etc. which were recorded by a wide variety of sen-
sors. The ARTHUR system consists of a master node, multiple measurement worker nodes, a local streaming
system and a gateway that stores the data to the cloud. The authors describe the hardware and software of this
system and discuss its advantages and disadvantages.
1 INTRODUCTION
The competitiveness of manufacturing companies
stands and falls with efficiency in production. Col-
lecting relevant production data in combination with
Machine Learning (ML) can contribute to increasing
efficiency in many areas of manufacturing. When
integrating and implementing Artificial Intelligence
(AI)-based systems, production facilities often have
to be costly adapted in a time-consuming process to
enable a systematic data collection. It is a challenge
to assess in advance the impact of ML-based systems
on business-relevant key figures. However, such pre-
dictions must be made at the latest for the release of
funds for larger investments. Therefore, test before
invest is a good approach to be able to assess the influ-
ence of ML-based systems on business-relevant key
figures. Especially for small and medium-sized en-
terprises (SME)s a low-cost solution, like proposed
in this paper, is of particular interest (Kaiser et al.,
2021).
Typical ML based systems for manufacturing are
visual quality inspection, process optimization and
a
https://orcid.org/0000-0002-1341-2704
b
https://orcid.org/0000-0001-9831-2181
maintenance prediction (Cioffi et al., 2020). Imple-
menting such ML solutions requires obtaining the ap-
propriate data, which can be a costly and difficult
problem. Production and automation engineers have
a lot of experience and knowledge about possible
data collection options. However, there is a lack of
ML expertise, which is usually provided by external
companies with data scientists in a test before invest
project. A typical scenario for testing ML approaches
in production is to collect the data at the shop floor,
and transfer the data to an on-premise or external
cloud storage solution. Data scientists work with the
provided data to train ML models and show the re-
sults and possible improvements to the manufactur-
ing company. While there are many professional so-
lutions for a Data Acquisition System (DAQ) to en-
able this workflow, these usually involve high costs
and the use of expensive predefined hardware which
is compatible with the individual ecosystem (Haizad
et al., 2016). The work on hand proposes a low-cost,
fast, dynamic, easily adaptable Data Acquisition Sys-
tem, that sends the collected data into a Cloud, where
it can further be processed by data scientists. The
distributed DAQ, dAta collectoR sysTem witH dis-
tribUted sensoRs (ARTHUR), collects data from spa-
Schneider, N., Ruf, P., Lermer, M. and Reich, C.
ARTHUR: Machine Learning Data Acquisition System with Distributed Data Sensors.
DOI: 10.5220/0011747100003488
In Proceedings of the 13th International Conference on Cloud Computing and Services Science (CLOSER 2023), pages 155-163
ISBN: 978-989-758-650-7; ISSN: 2184-5042
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
155

tially distributed different sources and ensures the re-
liability of the system, its scalability and the time syn-
chronization of the individual data collection compo-
nents. Monitoring ensures the data quality inspection.
The paper is structured as the following: Section
2 gives an overview of the related work. The require-
ments for a distributed DAQ are defined in Section 3.
Section 4 presents and describes the ARTHUR sys-
tem. After the evaluation in Section 5 a conclusion is
drawn in Section 6.
2 RELATED WORK
The main advantages of distributed measurement sys-
tems have been known for some time. The authors
in (Grimaldi and Marinov, 2001) describe those ad-
vantages where they point out that improved scalabil-
ity, fault tolerance of singular instances, real-time ca-
pabilities, and the collaboration of parallel processes
will be the enabler for using new and upcoming soft-
ware technologies in such distributed environments.
The advantages which are described build the basis
for modern and distributed Industry 4.0 environments.
In most use cases, the biggest entry barrier, when
adapting an existing environment to a distributed en-
vironment with Industry 4.0 capabilities and going
into the direction of a smart factory, is the high cost of
retrofitting older machines and infrastructures. It has
been shown, in recent years, that cost-effective solu-
tions can be achieved. One of the solutions is to use
systems like a Raspberry Pi, which is expected to hit
a market size of 385 million dollar by 2026 in the in-
dustry according to (IndustryARC, 2021). Raspberry
Pis are used in many different domains, since they
are cost-effective, suited for prototyping, and perfor-
mant IoT devices are stated in a survey of (Saari et al.,
2017).
The possibility of using a Raspberry Pi cluster as
a backbone for a smart factory has been surveyed in
(Kim and Son, 2018). The authors identify the ba-
sic functions, which can be implemented by using
a Raspberry Pi cluster: Data collection, monitoring,
preprocessing and processing, time synchronization,
and the secure communication of data. In the out-
look, they conclude that an experiment for speed and
accuracy has to be conducted. The approach proposed
in this paper implements all the basic functions to en-
sure the integrity and accuracy of heterogeneous data
and additionally provides an evaluation that includes
the speed. ARTHUR is also part of the ML pipeline
but concentrates on distributed data collection and ex-
pandability.
Another data acquisition showcase is described in
(Kamat et al., 2021). It is shown, that in the smart
manufacturing domain it is possible and efficient to
use low-cost Raspberry Pis in combination with cloud
storage for implementing a predictive maintenance
and fault detection solution. The successful usage
of Raspberry Pis for different problems in the in-
dustry has been proven in many inherently different
use cases, compare (Ravindran et al., 2021), (Rama-
lingam et al., 2019), (D., 2017), (Chu and Yap, 2021),
(Song and Moon, 2022). The approach proposed in
this paper is conditionally used case-independent, as
heterogeneous data is supported and the time con-
straints are clearly defined.
In (Anik et al., 2022), a cost-effective, scalable
and portable open-source Internet of Things (IoT) in-
frastructure for indoor environment sensing is pre-
sented. As multiple Raspberry Pi enabled systems
are placed in different areas of an apartment, local
databases are synchronized with a central server. Al-
though the basic architecture is similar to the one
described in the work on hand, ML-related opera-
tions were not considered. Furthermore, the individ-
ual Raspberry Pi nodes in this work have their own
database which is then synchronized with a central
SQL database after a certain time. ARTHUR, on the
other hand, sends recorded data from the individual
sensor nodes directly to a NoSQL database via an
event stream.
In (Ferencz and Domokos, 2018) the authors pro-
pose a Java based application used for sensor data
collection in combination with Raspberry Pis. The
backbone is built on the use of a multi-node Apache
Cassandra cluster with a replication factor of 3. It
has been shown that the Redis database is superior
to Apache Cassandra in many use cases, comparing
(Seghier and Kazar, 2021), (Reichardt et al., 2021).
Additionally, it has been demonstrated in (Parks et al.,
2022) that Redis streams are future proof when de-
signing systems with real-time constraints. After see-
ing those results, it was then decided that our ap-
proach should use the Redis database with its stream-
ing capabilities.
3 REQUIREMENTS FOR A
DISTRIBUTED MEASURING
SYSTEM
Measurement technology must keep up with the ML
task for manufacturing in terms of flexibility and
adaptability to varying measurement tasks. Above all,
this means effortless expandability in the number of
sensors to be integrated, as well as the understand-
CLOSER 2023 - 13th International Conference on Cloud Computing and Services Science
156

ing of common protocols in production (e.g., OPC-
UA, CAN, Profibus, etc.). These numerous require-
ments have been investigated during the development
of ARTHUR and will be presented and examined in
more detail in the following paragraphs.
R1: Easily Extendable. The system must be eas-
ily extendable with additional sensor components for
collecting data in order to have the freedom of inte-
grating the needed data sources for the ML applica-
tion. It should be possible to connect a data source to
ARTHUR using various technologies such as OPC-
UA, CAN, Profibus, MQTT, REST, TCP, a digital
signal, an analog signal, a switch, and much more.
The ARTHUR system should provide an abstract pro-
gramming model that supports the implementation of
new interfaces and protocols, respectively, without in-
fluencing or disturbing existing components of the
system.
R2: Data Pre-Processing on the Edge. Data sci-
entists usually like to work on raw data, but in cases
of data privacy, amount of data, timing conditions, or
noise, the raw data has to be pre-processed. Typical
examples of pre-processing are cleaning, normaliz-
ing, aggregation, or building the average of a value
across a dataset. When pre-processing the data as
close to the respective source as possible, the net-
work load can be drastically reduced (Hafeez and
Kathirisetty, 2022). The disadvantages are that the
amount of resulting data will contain a lower infor-
mation density and that errors during pre-processing
cannot be corrected afterwards.
R3: Data Quality Assessment. The quality of an
ML solution correlates strongly with the quality of
the dataset that was used for its training. Ensuring the
quality of an acquired dataset within a distributed sys-
tem brings additional complexity to the overall sce-
nario, as unreliable network transactions must be con-
sidered. To ensure the quality of the data, threshold
values can be used, for example, to check the data
stream for anomalies like sensor failures. (Keijzer and
Ferrari, 2022). The ARTHUR system should allow
for the extension and utilization of further and cus-
tomizable quality control tests.
R4: Affordable Data Acquisition. The system
should be inexpensive, easy to build, and easy to im-
plement in existing environments. For this purpose,
the use of open-source technologies should be favored
over expensive licensing or proprietary solutions. The
overall system should be reasonably stable, but not
implemented in terms of a complete industrial solu-
tion and therefore be in line with the motto: “test
before invest”. This principle has been touted as a
strategic means for driving the digital transformation
of European SMEs by European Commission Digital
Innovation Hubs (Asplund et al., 2021).
R5: Heterogeneous Collaboration. As there is of-
ten an absence of expert data scientists in SMEs, the
utilization of gathered data within ML systems is not
trivial. To overcome such boundaries, a common col-
laboration platform for the respective domain experts,
e.g., mechanics, shopfloor workers and collaborating
data scientists, is required. A data scientist may ob-
tain the sensed data by performing Application Pro-
gramming Interface (API) calls to the cloud environ-
ment.
When ML workflows are made configurable for
a respective task, domain experts become more inde-
pendent with respect to the ad-hock training and as-
sessment of models.
R6: Time Constraints. A prompt reaction to
events that occur within an ARTHUR system can be
very important, which is why a high data throughput
must be ensured throughout the system and bottle-
necks have to be eliminated. The speed of the sys-
tem should also not be affected by a growing num-
ber of nodes. Further, the Nyquist Sampling Theorem
(Shannon, 1984) requires that the sample rate should
be greater than twice the amount of analog signals,
which has to be taken into account.
4 ARTHUR A DISTRIBUTED
DATA ACQUISITION SYSTEM
ARTHUR is a distributed DAQ system, which has
been developed during the research project ”DQ-
Meister: quality assessment - predictive quality as-
sessment for complex production processes” and is
used in the model factory at the Furtwangen Univer-
sity. The following subsections describe the require-
ments as well as the architectural structure of the sys-
tem.
4.1 Machine Learning Infrastructure
In order to fulfill the previously described require-
ments for the distributed DAQ, a hierarchical ap-
proach is presented in Fig. 1, where domain experts
and data scientists can have access in order to gener-
ate models for their specific ARTHUR systems.
ARTHUR: Machine Learning Data Acquisition System with Distributed Data Sensors
157
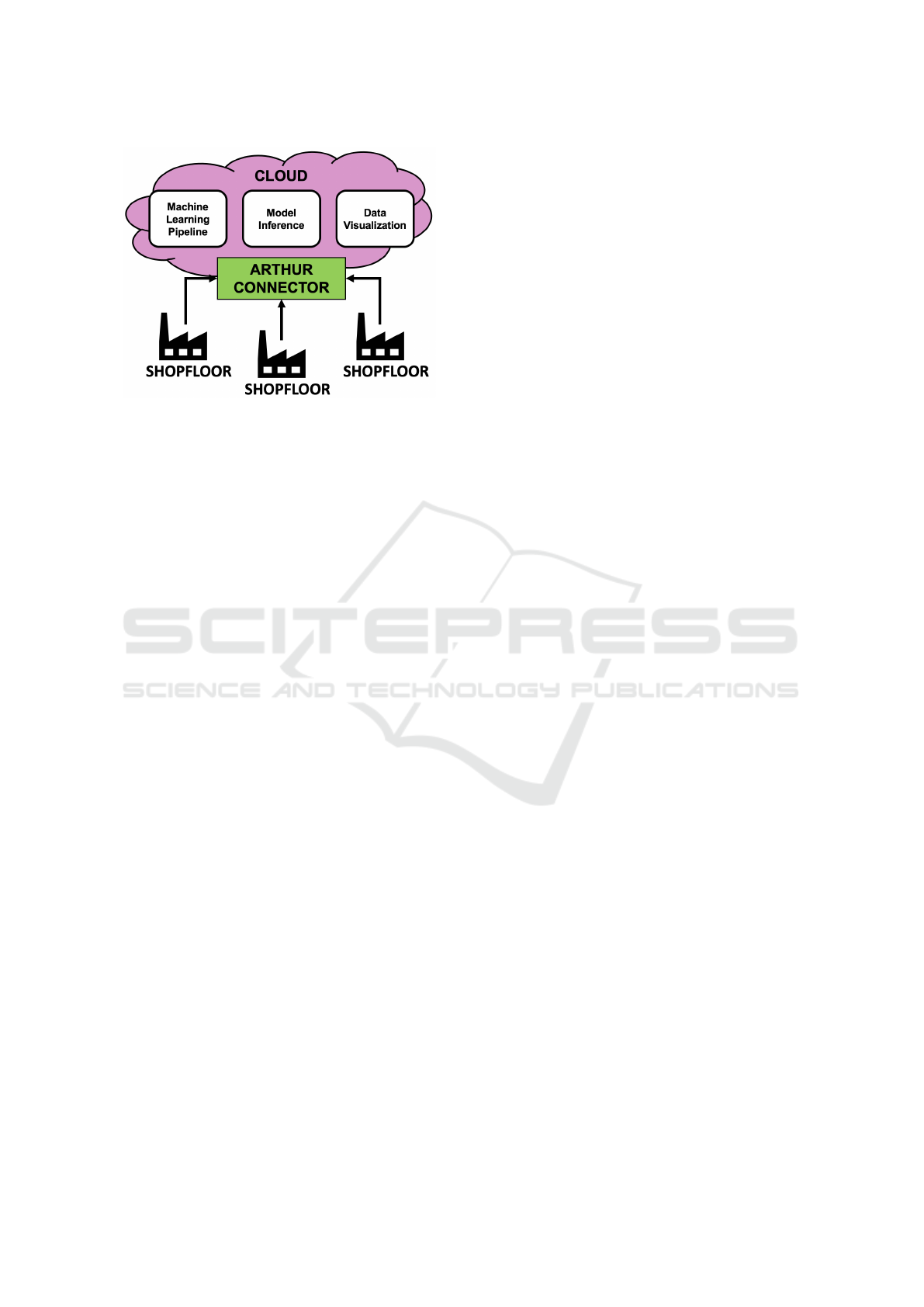
Figure 1: High-level Perspective of the ML Infrastructure.
Data from a shopfloor is collected from a cloud
environment using the ARTHUR Connector and per-
sisted for future access (see Fig. 1). A web interface
as part of the Data Visualization module allows vi-
sualizing and monitoring the particular datasets. The
resource-intense training of a respective model is car-
ried out in a scalable cloud solution, where the Ma-
chine Learning Pipeline is integrated. Peaks during
learning utilization can be tolerated by such a cloud
infrastructure in principle. The configuration and im-
plementation of such a ML pipeline is primarily in-
tended for a collaborating ML expert. Trained mod-
els are also inferred in this central environment repre-
sented in Fig. 1 as Model Inference, where the results
can also be visualized and compared.
4.2 Architecture
ARTHUR was developed with Python, but its open ar-
chitecture allows the implementation of components
with any other programming language. ARTHUR is
made up of distributed computing nodes with prede-
fined roles, typically with one master, several work-
ers, and a streaming system node at the local and
global layer (see Fig. 2). A node can take on any of
these roles simultaneously if its computing power and
local dependence allow it to do so. ARTHURs open
architecture makes it easy to add more roles to the
system and to increase the number of nodes at will.
The following subsections present existing roles and
layers of the system in detail.
4.2.1 Redis Database as Middleware
In order to enable a high degree of decoupling of in-
dividual roles, the communication between individual
nodes was developed on an event-based architecture
realized through the streaming system role. ARTHUR
uses Redis to implement this role (see Fig. 3). The ar-
chitectural concept of ARTHUR is not bound to the
use of Redis, other streaming systems such as e.g.,
Kafka can be used instead. Redis is a key value based
open source (BSD licensed) multi-model in-memory
database with a very high read and write speed. Re-
dis collects events of the same type in a stream de-
fined by a unique key name. A key is structured
in a similar way as a file path. It is a string con-
sisting of words and separators e.g., ”MEASURE-
MENT:START”. All measurement events of the type
”START” can be found under this key. The payload
of an event also consists of a combination of key-
value pairs. To ensure the order of multiple events
in a stream, each event is assigned a UNIX timestamp
as well as a sequence number. If the timestamp of
an event is lower than the timestamp of the last added
event resulting due to the clock drift between different
nodes, the largest timestamp of the last added event
with an increased sequence number is used. To min-
imize such occurrences, the streaming system node
also includes an NTP server, which all local nodes
use for time synchronization.
Local Caching. To ensure fast communication,
ARTHUR provides at least one local streaming sys-
tem node for each shopfloor. When using a single
streaming system node instance, a single point of fail-
ure occurs. To avoid this, several replication strategies
are possible depending on the use case. In order to en-
able global access to the recorded data of a shopfloor
streaming system node, ARTHUR Connectors exists
for transferring the local data to a cloud storage (see
Fig. 2). For the implementation of an ARTHUR
Connector with Redis, Redis consumer groups can
be used. With them, it is possible to track the infor-
mation about already consumed data between several
consumers of a group. This makes it possible to use
a consumer group to consume the data from the lo-
cal Redis node and automatically remove what has al-
ready been consumed. The local Redis instance thus
has similar properties to a limited queue. By persist-
ing individual events with ARTHUR, a historical view
of a shopfloor can be made possible and a dataset for
a ML task can be acquired.
Stream Processing. Redis supports the use of
stream processors with RedisGears. These allow op-
erations to be performed directly on a stream of data.
For this, RedisGears runs a python code directly in a
Redis instance. For example, a stream processor can
be used to check an event stream for a threshold vi-
olation. If a threshold violation is detected, another
event can be generated to react to it. Stream proces-
sors are used on the shopfloor level to process the data
CLOSER 2023 - 13th International Conference on Cloud Computing and Services Science
158
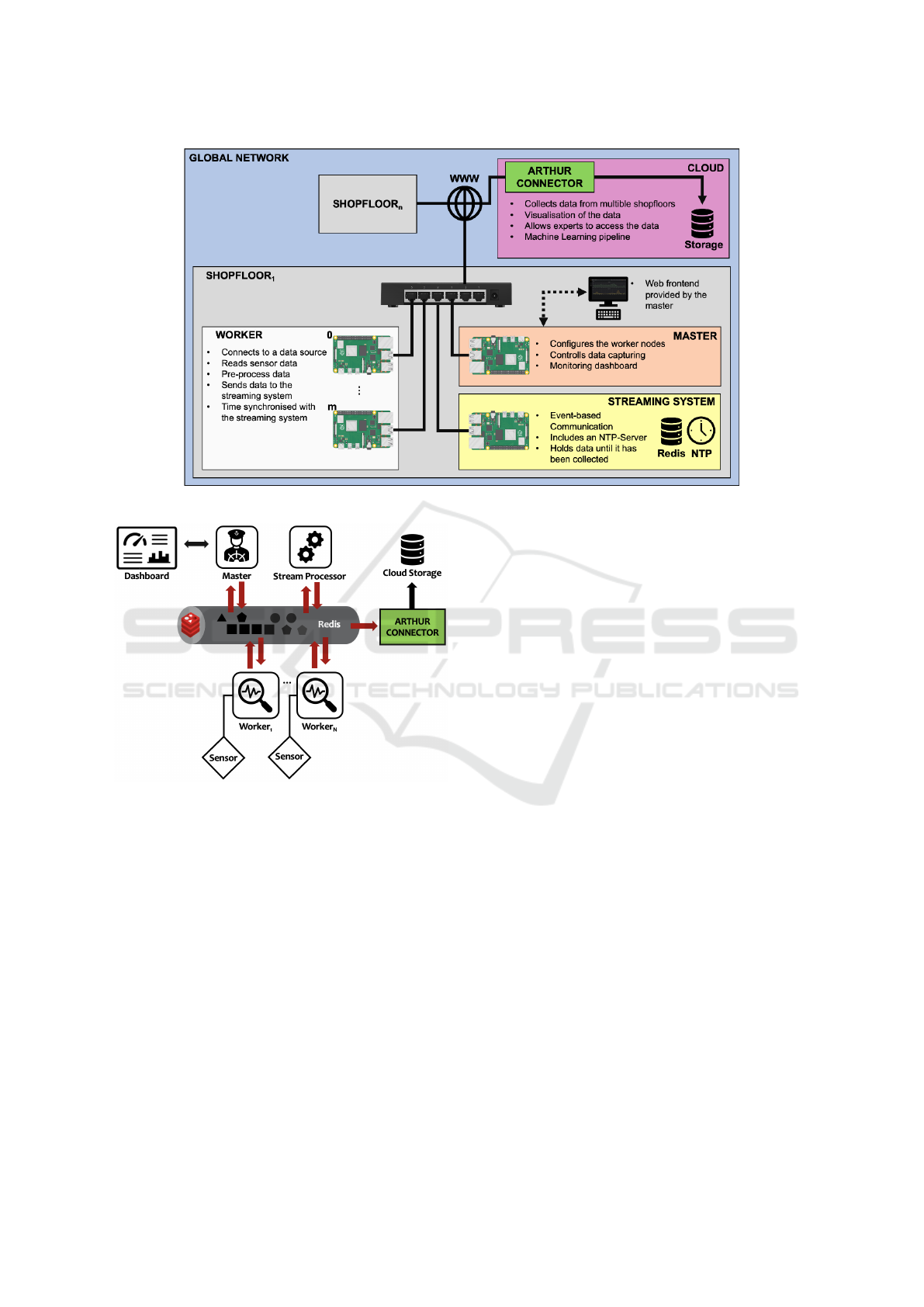
Figure 2: ARTHUR Structure with Nodes (Master, Worker, etc.).
Figure 3: Redis as streaming middleware.
stream as early as possible. Furthermore, Redis also
enables the direct deployment of an ML model within
the streaming system via RedisML. The proximity to
the data enables a fast execution time which can be
needed for application use cases with strong time con-
straints.
4.2.2 Node Event Handler
If a node is interested in a certain type of event, for
example, the arrival of an event to start the data ac-
quisition, it observes a corresponding stream for the
arrival of this event with an event handler. Event han-
dlers can be used to define the reaction of a node to an
event that occurs or fails to occur. If a node crashes
and then comes back online, it looks at missed events
and decides what to do next. In principle, the infor-
mation about who created an event and who reacted
to it is irrelevant for an individual node. A single
node therefore only needs the information about the
IP address to connect with the streaming system to be
part of ARTHUR. This can be determined as a con-
figuration when setting up a node. This property en-
ables considerable simplification in comparison to a
request-response system.
4.2.3 Master Node
The role of the master node provides a central control
unit for configuring the individual worker nodes via
the following events:
• StartEvent(startTime: UNIX Nanosecond
timestamp)
• StopEvent(stopTime: UNIX Nanosecond
timestamp)
• ConfigChangeEvent(diviceID: Unique
device ID, config: JSON)
An important role of the master is the transmis-
sion of a start event for the simultaneous start of the
data recording. Furthermore, the master functions
as a dashboard for monitoring the system. Grafana,
an open-source dashboard, is used for this purpose.
Grafana enables the connection of the local Redis in-
stance as a data source from which data is constantly
read out. Such a dashboard can be adapted to any use
case and is recommended to monitor the status of the
database. With the dashboard, it is possible to mea-
sure the network load caused by the communication
and to observe the available memory of the local Re-
dis instance.
ARTHUR: Machine Learning Data Acquisition System with Distributed Data Sensors
159
4.2.4 Worker Node
The worker role serves as an adapter between
ARTHUR and various data sources. A worker is con-
trolled by several event handlers who constantly wait
for events like:
• MEASUREMENT:START
• MEASUREMENT:STOP
• WORKER:CONFIG:CHANGE
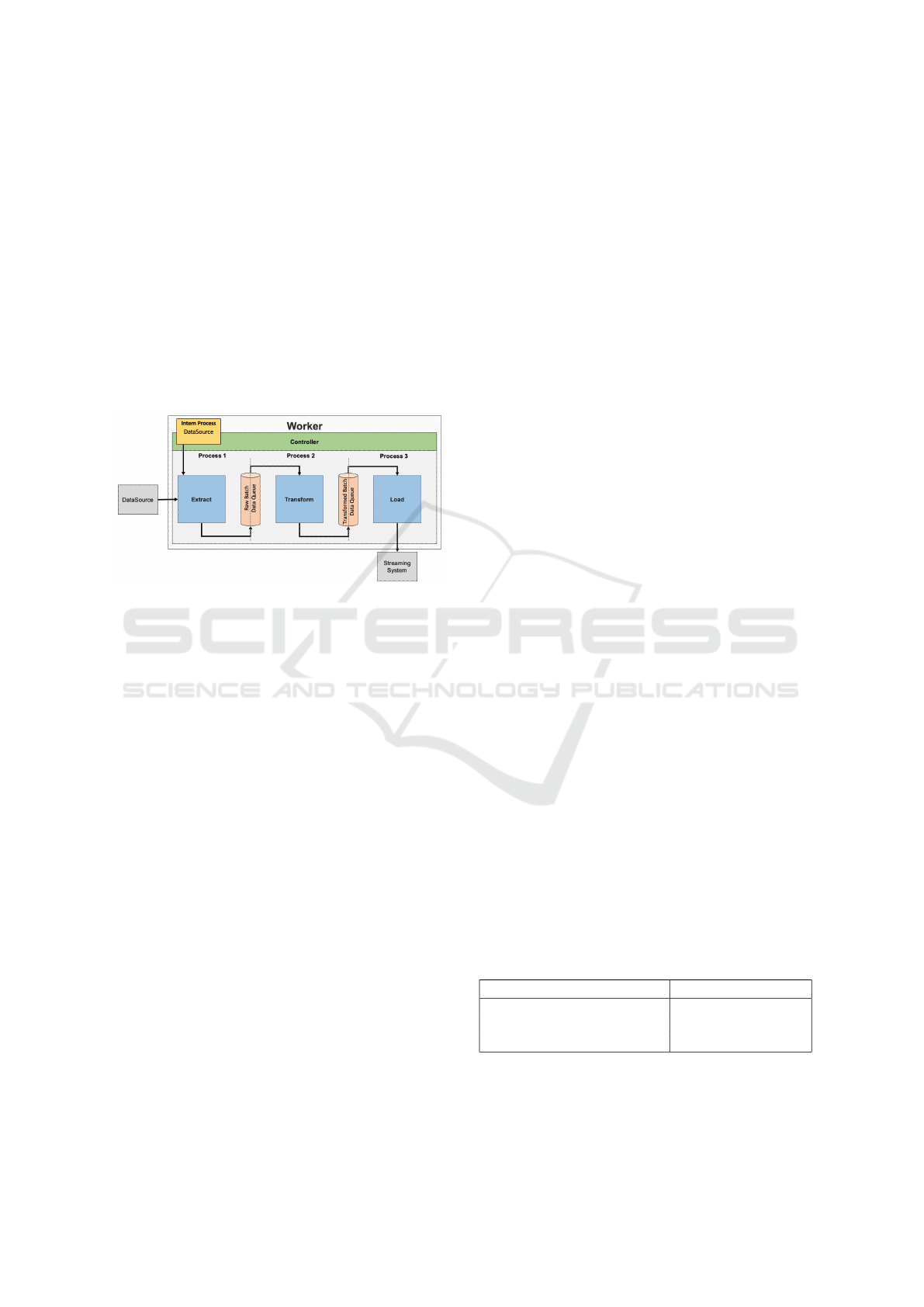
To achieve optimal hardware utilization and to
guarantee a high data acquisition rate, the worker
starts several processes inspired by the Extract Trans-
form Load (ETL) design pattern (see Fig. 4). All pro-
Figure 4: Dataflow in a worker node.
cesses are started and managed from a main process,
called controller and communicate with each other
over first in first out (FIFO) queues. Synchronous pro-
cessing of the data in a queue is necessary to ensure
its correct order. The following sections discuss the
individual ETL processes in more detail.
Extract Process. The extract process receives data
from a connected data source. This can be done in
different ways and is strongly dependent on the use
case of the worker. Data can be directly produced by
an intern worker process or be obtained from external
sources e.g., OPC-UA.
If the master starts data acquisition by sending a
start event, all distributed workers react to the event
with their corresponding event handlers and inform
the controller. The controller of a worker forwards
the start signal to the extractor process. During data
acquisition, the extractor continuously reads one ore
multiple targets and writes the recorded data batches
into the Raw Batch Queue for further processing.
Transform Process. The transform process reads
incoming batches from the Raw Batch Queue and pro-
cesses them further. After the data has been success-
fully processed, it is transferred to the Transformed
Batch Queue. This process can be used to enable in-
dividual data pre-processing at the edge. For example,
averages can be formed from the raw data to minimize
the number of data points resulting in a reduced load
for the system.
Load Process. The load process is responsible for
persisting incoming data batches from the Trans-
formed Batch Queue by sending them to the streaming
system. The streaming system further takes care of
the received data (see section 4.2.1). For this purpose,
the load process uses the Redis interface to attach data
batches as events to the MEASUREMENT:DATA stream.
.
5 EVALUATING THE
REQUIREMENTS
In this section, the implemented ARTHUR system
is evaluated and discussed according to the require-
ments stated in section 3.
Description of the Used Hardware. ARTHUR has
been successfully used to acquire data from multiple
data sources in a grinding process on a CNC machine
tool. All worker nodes as well as the master node and
the streaming system node were setup on a Raspberry
Pi 4 with 8GB RAM. The usage of a Raspberry Pi
is not mandatory. ARTHUR can easily be deployed
on different hardware if e.g., a use case requires more
computational power. The choice of the Raspberry Pi
was made for several reasons. The connection of dif-
ferent data sources to a Raspberry Pi is easily possible
through already existing expansion cards. The Pi also
has an ethernet port that allows a direct network con-
nection.
In the experiments, we used a separate worker
node (see Fig. 5), a master node, and a streaming sys-
tem node for each data source. To evaluate the max-
imum sample rate, data synchronization, etc. during
the experiment we used a signal generator instead of
the CNC machine.
The following Table 1 provides an overview of the
data sources in the real manufacturing process. Both
Table 1: Overview of all data sources.
Data source Signal
Dittel AE6001 acoustic emission
Kistler force plate X-Y-Z force values
Simens SIMATIC IPC227E machine tool values
the acoustic emission and force values were recorded
via the GPIO HAT MCC118 analog-to-digital con-
verter mounted on the Raspberry Pi. The MCC118
CLOSER 2023 - 13th International Conference on Cloud Computing and Services Science
160

Figure 5: Experimental Setup.
HAT of the Raspberry Pi is able to acquire data at a
sample rate of 100 kHz per second with a resolution
of 12-bit in a value range of +-10 volts and has 8 input
channels. The maximum recording rate of 100 kHz
is divided equally between several channels. Thus,
when using two channels, a maximum data recording
rate of 50 kHz per channel is possible. The MCC118
Python library daqhat was used to implement the ex-
tract process described in the section 4.2.4. The same
extract process implementation was used to read AE
and force values.
Evaluation of R1: Easily Extendable. In order to
receive data from the SIMATIC IPC, an OPC-UA
server was configured on it, which publishes the ma-
chine parameters of the machine tool. These were
then read out by a worker via OPC-UA, for which the
python library opcua was used in the reader process.
Connecting additional data sources with OPC-UA
or other technologies does not affect the recording of
existing workers. If adding a new work node, it is
sufficient to configure the IP address of the streaming
system node. The requirement for simple expandabil-
ity of the system was therefore fulfilled. How many
worker nodes can be added depends on the amount
of data collected, which is related to the sample rate
configured in the worker node.
Evaluation of R2: Data Pre-Processing on the
Edge. The analog signals recorded by the MCC118
must be further processed for their storage. The
MCC118 writes recorded values of all its channels
into a single list. The list is then pre-processed by
the transform process presented in section 4.2.4 and
thus divided into its individual channels. In addition,
the recorded force value must be converted from volt
to newton.
Pre-processing of the data can be done as desired
by the customizable transformation process and s the
requirement R2.
Evaluation of R3: Data Quality Assessment. Fig-
ure 6 shows the input data of the value of the
force plate Z direction, defining two thresholds. If
the measurement is outside the T hreshold
min
and
T hreshold
max
, the worker node of ARTHUR can sig-
nal alarms locally or/and sends an event to the cloud
to avoid failure in data collection. Due to the simple
Figure 6: Sensor input with Thresholds.
possibility of extending the system with quality mech-
anisms, requirement R3 can be considered fulfilled.
Evaluation of R4: Affordable Data Acquisition.
Although the proposed ARTHUR system consists of
multiple Raspberry Pis, other low-cost embedded de-
vices can be utilized. Low-cost sensors can be con-
nected to any device capable of acting as a worker
node, e.g., a laptop or stationary PC, where resource-
intense operations like pre-processing can be carried
out. Of disadvantage is that the operation of Rasp-
berry Pis might be inappropriate for the rough manu-
facturing environment. The presented system is indi-
vidually adaptable to the cost requirements and fulfills
the demand for a cost-effective system formulated in
R4.
Evaluation of R5: Heterogeneous Collaboration.
The collaboration of domain experts and data sci-
entists can be accomplished by granting access to
datasets in the cloud system. When the resulting ML
pipelines are being made available to the cloud en-
vironment, the re-training with new datasets and the
inference of respective models is made possible. In
principle, there can be triggers for starting a partic-
ular ML training task in the cloud, using data from
a specific ARTHUR system or a fusion of multiple
ARTHUR systems data respectively. As the cloud in-
terface can be extended with arbitrary logic, the in-
cremental training of a model can be started for ex-
ample whenever a certain amount of new data be-
comes available. At the same time, existing work-
ARTHUR: Machine Learning Data Acquisition System with Distributed Data Sensors
161

flows/pipelines can dynamically be adapted to current
situations, for example reacting to sensor drifts. This
enables heterogeneous collaboration and meets the re-
quirement of R5.
Evaluation of R6: Time Constraints. By opti-
mally utilizing the resources of the Raspberry Pi and
the MCC118 GPIO HAT, a maximum recording rate
of 80 kHz per worker, resulting in a 2 MB/sec network
load, could be achieved without causing queue jam-
ming. The CPU load of the local streaming system
node implemented with Redis was utilized by 3 work-
ers at an average of 60%, enabling fast processing of
events. A reaction to incoming events takes place im-
mediately after their occurrence. If more workers are
added in the future, Redis can be scaled both hori-
zontally and vertically to continue ensuring a fast re-
sponse time. The system met the time requirements in
the DQ-Meister project and thus fulfills requirement
R4.
6 CONCLUSION
In this work, a Data Acquisition System for dis-
tributed sensors was discussed with respect to pro-
totypical ML operations. This hierarchical system
consists of multiple embedded sensing devices, which
are synchronized. The system has been shown to be
easily extendable and it is not dependent on specific
technologies like OPC-UA. ARTHUR supports data
pre-processing close to the resource to reduce net-
work load and can additionally be tailored to spe-
cific data pre-processing use cases. The same goes
for specific data quality assessments where thresholds
for data values can be defined and acted upon on with
customized events. The proposed system was evalu-
ated with several Raspberry Pis and low cost sensors
making it affordable, even for early stages of proto-
typing. The provided interface enables a heteroge-
neous collaboration between domain experts and data
scientists. In order to uphold the time constraints of
different use cases, appropriate hardware can be used
without a problem as the architecture of the system is
hardware agnostic.
For the future, it is planned to integrate cam-
eras for visual surface quality inspection and integrate
ARTHUR into non-Raspberry Pi hardware. Addition-
ally we intend to add more complex hardware, like a
precision RTP oscilloscope with a max. sample rate
of 40 G sample/s in order to further test the limits of
the system. Furthermore a thorough security analy-
sis of the system has to be conducted in order to be
prepared for future Machine Learning audit require-
ments. Finally, the system will be evaluated with a
complex manufacturing use case.
ACKNOWLEDGMENT
This work as outcome of the project DQ-Meister*in
with the project number P2021-01-013 has received
funding from the Carl Zeiss Stiftung.
REFERENCES
Anik, S. M. H., Gao, X., Meng, N., Agee, P. R., and McCoy,
A. P. (2022). A cost-effective, scalable, and portable
iot data infrastructure for indoor environment sensing.
Journal of Building Engineering, 49:104027.
Asplund, F., Macedo, H. D., and Sassanelli, C. (2021).
Problematizing the service portfolio of digital innova-
tion hubs. In Camarinha-Matos, L. M., Boucher, X.,
and Afsarmanesh, H., editors, Smart and Sustainable
Collaborative Networks 4.0, pages 433–440, Cham.
Springer International Publishing.
Chu, Y. B. and Yap, W. K. (2021). Raspberry pi based
wireless interface system for automated microfabrica-
tion in the context of industry 4.0. In Zakaria, Z. and
Emamian, S. S., editors, Advances in Electrical and
Electronic Engineering and Computer Science, pages
117–123, Singapore. Springer Singapore.
Cioffi, R., Travaglioni, M., Piscitelli, G., Petrillo, A.,
and De Felice, F. (2020). Artificial intelligence and
machine learning applications in smart production:
Progress, trends, and directions. Sustainability, 12(2).
D., D. (2017). Industrial automation using iot with rasp-
berry pi. International Journal of Computer Applica-
tions, 168:44–48.
Ferencz, K. and Domokos, J. (2018). Iot sensor data ac-
quisition and storage system using raspberry pi and
apache cassandra. In 2018 International IEEE Confer-
ence and Workshop in
´
Obuda on Electrical and Power
Engineering (CANDO-EPE), pages 000143–000146.
Grimaldi, D. and Marinov, M. (2001). Distributed measure-
ment systems. Measurement, 30(4):279–287.
Hafeez, S. and Kathirisetty, N. (2022). Effects and compar-
ison of different data pre-processing techniques and
ml and deep learning models for sentiment analysis:
Svm, knn, pca with svm and cnn. In 2022 First Inter-
national Conference on Artificial Intelligence Trends
and Pattern Recognition (ICAITPR), pages 1–6.
Haizad, M., Ibrahim, R., Adnan, A., Chung, T. D., and Has-
san, S. M. (2016). Development of low-cost real-time
data acquisition system for process automation and
control. In 2016 2nd IEEE International Symposium
on Robotics and Manufacturing Automation (ROMA),
pages 1–5, Ipoh, Malaysia. IEEE.
IndustryARC (2021). Industrial raspberry pi market
2022 - 2027. IndustryARC, Report Code: AIR 0372.
CLOSER 2023 - 13th International Conference on Cloud Computing and Services Science
162

https://www.industryarc.com/Report/19454/industrial-
raspberry-pi-market.html.
Kaiser, J., Terrazas, G., McFarlane, D., and de Silva, L.
(2021). Towards low-cost machine learning solutions
for manufacturing smes. AI & SOCIETY.
Kamat, P., Shah, M., Lad, V., Desai, P., Vikani, Y., and Sa-
vani, D. (2021). Data acquisition using iot sensors
for smart manufacturing domain. In Singh, P. K.,
Polkowski, Z., Tanwar, S., Pandey, S. K., Matei, G.,
and Pirvu, D., editors, Innovations in Information
and Communication Technologies (IICT-2020), pages
393–400, Cham. Springer International Publishing.
Keijzer, T. and Ferrari, R. M. (2022). Threshold design
for fault detection with first order sliding mode Ob-
servers. Automatica, 146:110600.
Kim, C.-S. and Son, S.-B. (2018). A study on big data clus-
ter in smart factory using raspberry-pi. In 2018 IEEE
International Conference on Big Data (Big Data),
pages 5360–5362.
Parks, D. F., Voitiuk, K., Geng, J., Elliott, M. A., Keefe,
M. G., Jung, E. A., Robbins, A., Baudin, P. V., Ly,
V. T., Hawthorne, N., Yong, D., Sanso, S. E., Rezaee,
N., Sevetson, J. L., Seiler, S. T., Currie, R., Pollen,
A. A., Hengen, K. B., Nowakowski, T. J., Mostajo-
Radji, M. A., Salama, S. R., Teodorescu, M., and
Haussler, D. (2022). Iot cloud laboratory: Internet
of things architecture for cellular biology. Internet of
Things, 20:100618.
Ramalingam, S., Baskaran, K., and Kalaiarasan, D. (2019).
Iot enabled smart industrial pollution monitoring and
control system using raspberry pi with blynk server.
In 2019 International Conference on Communication
and Electronics Systems (ICCES), pages 2030–2034.
Ravindran, V., Ponraj, R., Krishnakumar, C., Ragunathan,
S., Ramkumar, V., and Swaminathan, K. (2021). Iot-
based smart transformer monitoring system with rasp-
berry pi. In 2021 Innovations in Power and Advanced
Computing Technologies (i-PACT), pages 1–7.
Reichardt, M., Gundall, M., and Schotten, H. D. (2021).
Benchmarking the operation times of nosql and mysql
databases for python clients. In IECON 2021 – 47th
Annual Conference of the IEEE Industrial Electronics
Society, pages 1–8.
Saari, M., bin Baharudin, A. M., and Hyrynsalmi, S. (2017).
Survey of prototyping solutions utilizing raspberry pi.
In 2017 40th International Convention on Information
and Communication Technology, Electronics and Mi-
croelectronics (MIPRO), pages 991–994.
Seghier, N. B. and Kazar, O. (2021). Performance bench-
marking and comparison of nosql databases: Redis vs
mongodb vs cassandra using ycsb tool. In 2021 In-
ternational Conference on Recent Advances in Math-
ematics and Informatics (ICRAMI), pages 1–6.
Shannon, C. E. (1984). Communication in the presence of
noise. In Proceedings of the IEEE, volume 72, pages
1192–1201.
Song, Z. and Moon, Y. B. (2022). A cloud-fog continuum
computing architecture for cyber-manufacturing sys-
tems. Advanced Engineering Forum, 45:97 – 102.
ARTHUR: Machine Learning Data Acquisition System with Distributed Data Sensors
163
