
3D Semantic Scene Reconstruction from a Single Viewport
Maximilian Denninger
1,2 a
and Rudolph Triebel
1,2 b
1
German Aerospace Center (DLR), 82234 Wessling, Germany
2
Technical University of Munich (TUM), 80333 Munich, Germany
Keywords:
3D Reconstruction, 3D Segmentation, Single View, Sim2real.
Abstract:
Reconstructing and understanding our environment is fundamental to human nature. So, we introduce a novel
method for semantic volumetric reconstructions from a single RGB image. Our method combines reconstruct-
ing regions in a 3D scene that are occluded in the 2D image with a semantic segmentation. By relying on a
headless autoencoder, we are able to encode semantic categories and implicit truncated signed distance field
(TSDF) values in 3D into a compressed latent representation. A second network then uses these as a recon-
struction target and learns to convert color images into these latent representations, which get decoded during
inference. Additionally, we introduce a novel loss-shaping technique for this implicit representation. In our
experiments on the realistic benchmark Replica-dataset, we achieve a full reconstruction of a scene, which is
visually and quantitatively better than current methods while only using synthetic data during training. On top
of that, we show that our method can reconstruct color images of scenes recorded in the wild. So, our method
allows reverting a 2D image projection of an indoor environment to a complete 3D scene in novel detail.
1 INTRODUCTION
Understanding our surroundings through vision is one
of the fundamental tasks for a visual perception sys-
tem used by any artificial structure or natural being.
This skill allows a mobile robot to plan and navigate
indoor space. We can achieve this by reverting the
camera’s projection from 3D to 2D. So, we propose
in this work a novel method to reconstruct a 3D scene
from a 2D color image, including the non-visible ar-
eas. In fig. 1, these non-visible areas from our single
camera view are highlighted in pink. On top of the
full scene reconstruction, we semantically segmented
our reconstructed scene simultaneously. Using only a
single color image, we avoid expensive depth sensors
and reduce the cost of our vision system. Addition-
ally, we remove the requirement of capturing several
images of our scene, as this hinders the quick and easy
use of applications down the line. Our approach can
be applied in many different fields, from augmented
reality, allowing the overlay of information in the re-
constructed map, to robotics, where it can enable the
planning in unknown scenes.
Our main contributions are:
a
https://orcid.org/0000-0002-1557-2234
b
https://orcid.org/0000-0002-7975-036X
• 3D semantic scene reconstruction from one image
• Implicit semantic representation for 3D scenes
• Novel loss shaping for latent reconstructions
2 RELATED WORK
2.1 Scene Compression
Scene compression is a crucial part of this work, as
we store our 3D scenes in a compressed latent for-
mat, which is used as a target for our scene recon-
struction network. Prior works such as DeepSDF
(Yao et al., 2021) and many others (Jiang et al., 2020;
Davies et al., 2020; Chen et al., 2021b) have shown
that implicit TSDF reconstruction is possible. These
reconstructions are converted back into a mesh us-
ing a marching cubes algorithm (Lorensen and Cline,
1987) or a neural network, as presented by Chen et
al. (Chen and Zhang, 2021). In addition, we incor-
porate the advances done by Chabra et al. (Chabra
et al., 2020) and split our scene into several blocks,
compressing them one by one. Yifan et al. (Yifan
et al., 2021) improved SDF reconstructions by adding
a second step to include high-frequency details. Simi-
lar to Denninger et al. (Denninger and Triebel, 2020),
Denninger, M. and Triebel, R.
3D Semantic Scene Reconstruction from a Single Viewport.
DOI: 10.5220/0011747700003497
In Proceedings of the 3rd International Conference on Image Processing and Vision Engineering (IMPROVE 2023), pages 15-26
ISBN: 978-989-758-642-2; ISSN: 2795-4943
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
15
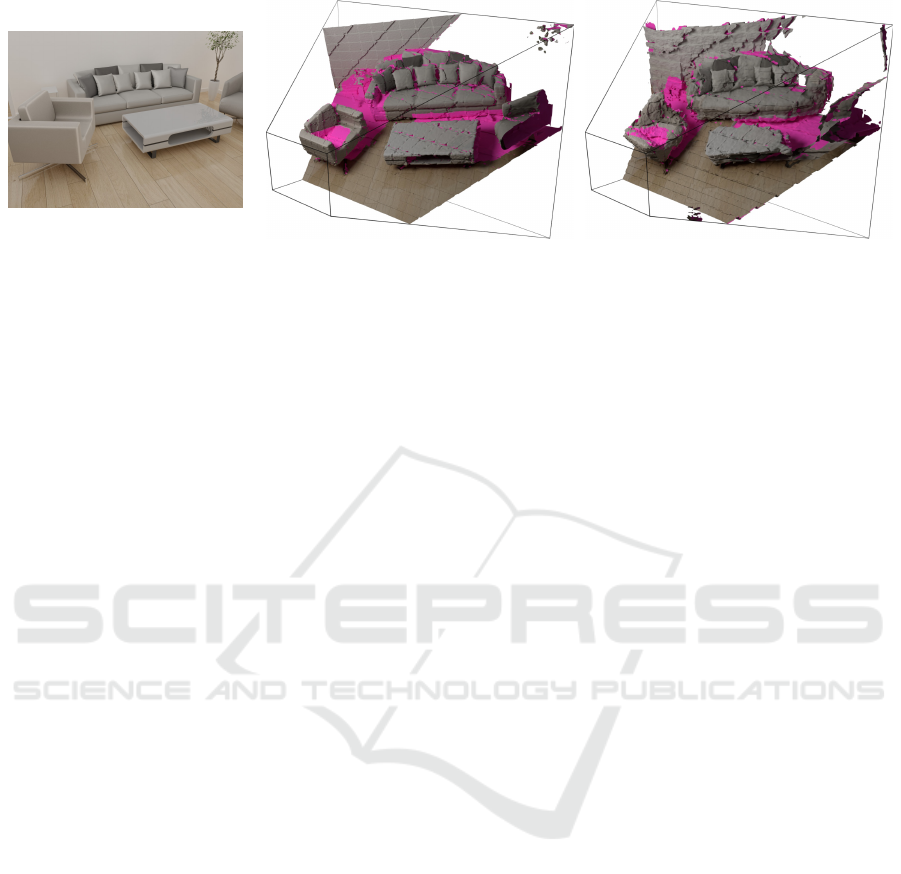
Ground Truth
Prediction
Input color image
Figure 1: Reconstruction of a 3D scene based on a single color image. On the right is the output of our method.
we align the output scene with our input color im-
age. Building on these ideas, we incorporate cate-
gories into the implicit TSDF reconstruction and add
a new loss to improve the network’s attention around
the objects’ surface. Furthermore, we highlight how
we compress millions of such blocks to use them as a
target for the scene reconstruction network.
2.2 3D Scene Reconstruction
Many recent works have explored the task of recon-
structing an entire 3D scene. Early works focus on
a simpler version of this problem by reconstructing
only the room layout (Ren et al., 2016; Dasgupta
et al., 2016). Other uses multiple viewports or a video
of a scene (Bo
ˇ
zi
ˇ
c et al., 2021; Zhang et al., 2021b;
Yariv et al., 2021; Wang et al., 2021; Oechsle et al.,
2021). Instead, this work relies on a single viewport
(Denninger and Triebel, 2020; Shin et al., 2019; Dah-
nert et al., 2021). Denninger et al. (Denninger and
Triebel, 2020) proposed a method to directly map a
2D color image into a 3D scene, where the trans-
formation from 2D to 3D is learned; we build our
approach based on their findings. Likewise, Shin et
al. (Shin et al., 2019) reconstructed a scene based on
a single color image inside the camera frustum. In
contrast, other methods like Dahnert et al. (Dahnert
et al., 2021) lift the 2D features into the 3D space by
using the camera’s intrinsic parameters and then re-
constructing the scene. Zhang et al. (Zhang et al.,
2021a) proposed a similar method, where one CNN
detects the objects and a second one their pose. A
third CNN then uses this information to optimize their
shape in 3D. The Mesh-RCNN (Gkioxari et al., 2019)
by Gkioxari et al. relies on estimating the pose of
the objects in a scene, and then they reconstruct their
shape. However, this does not include the reconstruc-
tion of the entire scene. Kuo et al. (Kuo et al., 2020)
instead rely on a CAD model retrieval approach rather
than a generative approach for the objects. We instead
propose to learn the 2D to 3D transformation and pre-
dict the entire scene at once, avoiding the problem of
setting a threshold for the bounding box detector. In-
stead of a color image Song et al. (Song et al., 2016)
used a depth image to perform a 3D semantic scene
reconstruction. Our approach also produces a 3D se-
mantic segmentation without relying on the propaga-
tion of 2D features. In contrast to NeRF from Milden-
hall et al. (Mildenhall et al., 2020), and its many
derivatives (Martin-Brualla et al., 2020; Chen et al.,
2021a; Barron et al., 2021; Mildenhall et al., 2021;
Xu et al., 2022), we only use one single color image
of a scene without knowing the camera’s pose.
3 SCENE REPRESENTATION
3.1 Problem Definition
We define our problem as a mapping from 2D image
coordinates p
c
= (x
c
,y
c
) to 3D scene coordinates p
s
=
(x
s
,y
s
,z
s
). Here, each final 3D coordinate has a trun-
cated signed distance field value (TSDF) and the cat-
egory of the closest surface. The input is an RGB im-
age I
c
: Ω
c
→
[0,255]
3
; Ω
c
⊂ R
2
and a generated
surface normal image I
n
: Ω
c
→
[−1,1]
3
, where Ω
c
is the set of image coordinates. This means that we
can evaluate our network Θ for a given 3D scene co-
ordinate p
s
and an image I =
{
I
c
(p
c
)| p
c
∈ Ω
c
}
with:
Θ :
{
I
c
(Ω
c
)
}
× R
3
→ R × N (1)
(I , p
s
) 7→ Θ(I , p
s
) = (t,c) | t ∈ [−σ, ··· , σ] , c ∈ N
(2)
Here the result for each point p
s
is the TSDF value
t and the category label c. This TSDF value is the
signed distance to the closest surface and can not be
smaller than the truncation threshold −σ or bigger
than σ. It is also positive outside of objects and neg-
ative inside of them. In contrast to a fixed voxel grid,
IMPROVE 2023 - 3rd International Conference on Image Processing and Vision Engineering
16

we can evaluate the scene at an arbitrary resolution
and are only bound by the network’s capacity.
Our TSDF values are stored view independent,
corresponding to a complete TSDF approach, where
the distance is zero on the surface and σ in the free
space. This so-called complete view contrasts a pro-
jected TSDF approach, where the distance is only cal-
culated along the camera view axis, e.g. Dahnert et
al. (Dahnert et al., 2021). However, such a projected
view contains considerable jumps in the TSDF space,
while a complete TSDF space is smooth, even though
it is more challenging to compute.
Inspired by Denninger et al. (Denninger and
Triebel, 2020), we also use a perspective transfor-
mation to map a 3D scene into a cube C = [−1,1]
3
.
This mapping is done using the camera’s pose matrix
K
extrinsic
followed by the perspective camera matrix
K
intrinsic
built from the known camera intrinsics. We
set the near-clipping plane to one meter and the far
one to four meters. After mapping our scene into the
cube, each color pixel corresponds to an axis-aligned
line in the cube. However, this perspective trans-
formation also introduces a distortion along the Z-
axis, making objects closer to the camera larger in Z-
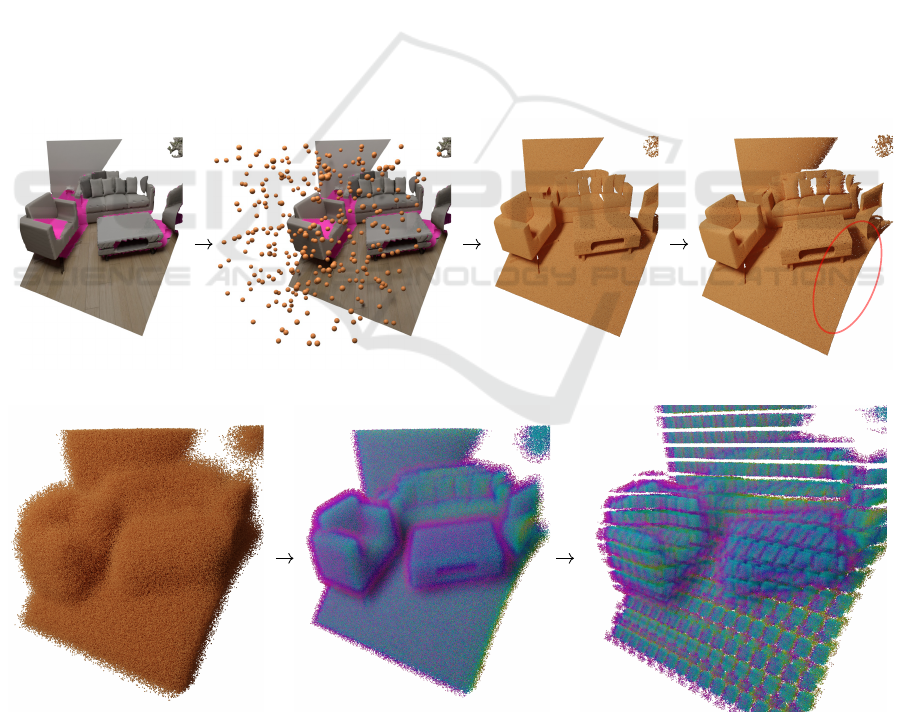
direction than objects farther away, see a) - c) in fig. 2.
We remove this distortion by applying the square root
to the Z-coordinate z
s
of the points p
s
, leading to d) in
fig. 2. As z
s
∈ [−1; 1], we first need to scale it to the
range [0;1] and afterwards to [−1;1]:
z
s
←
p
(z
s
+ 1)/2 · 2 − 1 =
p
2z
s
+ 2 − 1 (3)
This transformation improves the distribution in
Z-direction for our specific depth range while trans-
forming flat surfaces to curved ones, see d) in fig. 2.
3.2 Semantic TSDF Point Cloud
Generation
We create our own dataset, as none exists, which maps
2D images to sematic TSDF point clouds. Such a
point cloud should have TSDF values and semantic
labels around the surface of each object. For this,
we extend the SDFGen tool (Denninger and Triebel,
2020), as the original version only works on TSDF
voxel grids. At first, we add a semantic label to all
polygons and then rely on the octree combined with
a flood fill of the SDFGen tool to compute a TSDF
voxel grid with a shape of 128
3
. This voxel grid
is used to detect the free and occluded areas in our
scene, a) in fig. 2. To later check whether a point is
inside an object, we sample anchor points in the free
space, b) in fig. 2. To create our TSDF point cloud
around the objects, we start by sampling points on
the surface areas reachable from the camera. This
sampling is necessary as some polygons or part of
them are occluded, e.g. a couch hidden behind a wall.
We only want to reconstruct reachable objects of the
scene, nothing that lies behind a wall in a different
room. So, we define that a point p
s
on a polygon is
visible if at least three anchor points are reachable
from p
s
without intersecting any polygon. We use
three points to avoid extending the reachable space
through thin gaps. For example, the inside of a cup-
board with an open slit could be otherwise accessed.
As we aim to reconstruct scenes, we assume that the
objects’ insides are filled. These points then define
our surface, see c) in fig. 2. To correct the distortion
from the K
intrinsic
, we use eq. (3) and get d) in fig. 2.
We can now generate our desired TSDF points by
randomly taking a surface point and adding a random
direction vector with the length of 2σ, see g) in fig. 2.
We then determine the TSDF value for each newly
created point by finding its closest surface point with a
nearest neighbor search. However, the resulting point
is most likely not the closest point on the surface of
the curved polygon, as we only have a fixed amount
of surface points. We can find a closer surface point
by sampling around our original surface point on the
curved polygon. This process gets repeated until the
distance converges. We take the category from the
corresponding curved polygon. In the end, the sign of
the TSDF value is based on the visibility to an anchor
point. We repeat this for a final amount of 2,000,000
points per scene, calculating the TSDF value and cat-
egory per point, see f) in fig. 2.
To enable the alignment of our scene with the im-
age, we voxelize our created points. Using a res-
olution of 16, we get a good compromise between
the number of blocks and the structural details in-
side a block, see g) in fig. 2. We increase the block
size by a boundary factor b of 1.1 in every direc-
tion to make it easier to compress these blocks in
the next step. Points on the boundary are there-
fore included in more than one block. The code
for all can be found here: https://github.com/DLR-
RM/SemanticSingleViewReconstruction.
4 SCENE COMPRESSION
These voxelized blocks of point clouds need to be
brought into a latent representation to train our scene
reconstruction network. We follow a similar route as
DeepSDF and Deep local shapes (Yao et al., 2021;
Chabra et al., 2020) by compressing each block filled
with TSDF points into one latent vector using an im-
plicit TSDF representation. Our addition here is the
3D Semantic Scene Reconstruction from a Single Viewport
17
reconstruction of the category for each given point
and our unique loss-shaping technique.
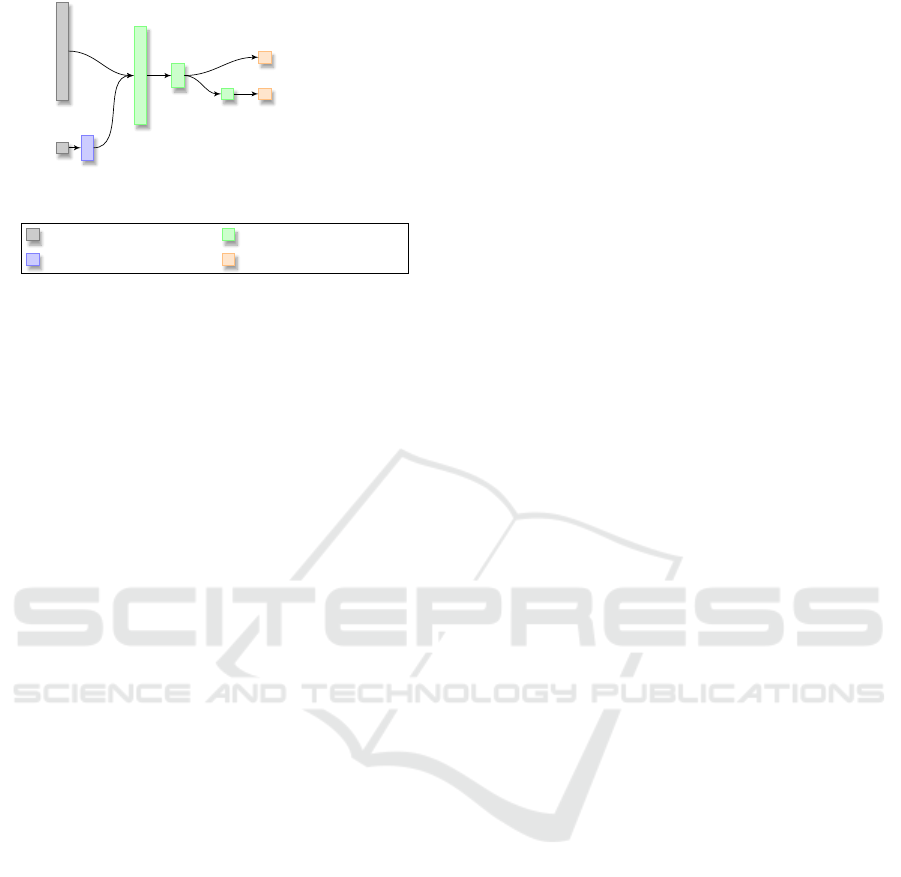
At first, we learn a transformation of our 3D point
into 128 values on which a Fourier transformation is
used, inspired by Tancik et al. (Tancik et al., 2020).
We concatenate this with the 512 values long latent
vector l for this block. This combined input vector
is forwarded through two layers of size 512 and 128,
each using a RELU activation. For the TSDF output
t, we only use a final layer to reduce the size down
to one value, whereas, for the class output, we rely
on two fully connected layers with a length of 16 and
then down to the number of classes
|
c
|
. This architec-
ture is depicted in fig. 3.
Our novel loss function here incorporates the pre-
diction of the TSDF value and the category class,
which can be seen in eqs. (4) and (5). We start by tak-
ing the absolute difference between the TSDF label
y
tsdf
and the TSDF output t of the network, resulting
in L
dist
. Using a standard category loss, we combine
the network’s category outputs c and the desired one
hot encoded category labels y
C
. The combination of
these losses is discussed in section 6.
L
dist
=
|
y
tsdf
−t
|
(4)
L
C
= −
10
∑
i=1
y
C
[i] · log (c[i]) (5)
For the training, we initialize the latent vector l
with zeros to ensure that the output is deterministic for
a given point cloud. We then optimize only the latent
vector for 2048 points per block for 1400 steps. Af-
terward, the network weights get optimized with the
frozen latent vector l for another 1400 steps. This pro-
cess is repeated for new blocks until the network con-
verges. All hyperparameters used here are found by
optimizing 7.259 networks, as the performance and
computation time are crucial.
As we compress an entire scene with a side res-
olution of 16, our compressed space has a size of
16
3
× 512 latent values, as each block gets com-
pressed into 512 values. So for each scene, we need
to perform 1400 latent update steps to optimize the
latent vector for our 16
3
= 4096 blocks, whereas each
a) Meshed voxelgrid 128 b) Anchor points c) Surface points
d) Surface points
Z corrected
e) Sampled points f) TSDF sampled points g) Blocked TSDF sampled points
Figure 2: Creating a blocked TSDF point cloud around the reachable surface. First, SDFGen (Denninger and Triebel, 2020)
creates a low-resolution voxel grid (a). In its free space, anchor points are sampled (b). These anchor points determine whether
a sampled surface point is reachable (c). We then remove the Z-compression (d) and sample new points around our surface
points (e). Finally, we determine the distance to the curved surface (f) and divide it into different blocks.
IMPROVE 2023 - 3rd International Conference on Image Processing and Vision Engineering
18
512
l
3
p
128
512
128
16
|
c
|
1
t: TSDF output
c: class output
Input
Legend:
Fourier transformation
Fully connected layers
TSDF and class output
Figure 3: Compressing the implicit semantic representation.
block contains 2048 points. On an Nvidia RTX 3090,
1400 steps take 1.15s per block. For 89,029 scenes
with 4096 blocks, this would take 13.3 years. To
speed this up, we split our scene into three parts:
boundary, non-boundary, and free/filled. For this, we
save a voxel grid during the TSDF point cloud gen-
eration, with a resolution of 256 of the Z-corrected
scene. This grid is created by calculating the TSDF
and semantic value for the voxel grid points. As most
are in free space, they can be filled by checking the
visibility to an anchor point.
We spend the most time on the boundary blocks,
ensuring that the TSDF values precisely follow the
object’s surface and assign the correct category. The
non-boundary blocks are much easier as they usually
only have a simple gradient in one direction, making
it easier to optimize the corresponding latent vector
l. For the filled and empty blocks, which don’t con-
tain any points, we can assign the corresponding la-
tent vector, which is predicted only once. All the filled
and empty regions get the category ”void” as they are
too far from a surface to predict a category. We start
with an estimated latent vector to speed up the predic-
tion for the boundary and non-boundary blocks. This
latent vector is part of a database of 1,483,472 blocks
(750 scenes) with the total 1400 steps we calculated
prior. So during the calculation of the rest, we find
the most similar block in the database for each new
block and use its latent vector as an initialization. The
similarity is compared by voxelizing the block’s point
cloud with a resolution of four into 64 blocks and then
averaging the TSDF values of these voxels. We then
add ten more elements containing our category distri-
bution for the block and compare this 74-long vector
via a KDTree to the vectors in the database.
These pre-initialized latent vectors then reduce the
number of optimization steps for boundary blocks
from 1400 to 750. Further, we stop early if the ab-
solute error on the TSDF values is below 0.02, which
we check every 125 steps. For the non-boundary
blocks, the database reduced the number of steps to
160, where we check every 20 steps if the absolute
TSDF error is below 0.03 and move on to the next
block if that is the case. With this reduction, we only
have to predict half of the blocks, while each block
only takes an average of 0.3s. So, the time on a sin-
gle GPU is reduced to only 1.27 years or roughly nine
days on 50 GPUs, giving us a compressed latent rep-
resentation that can be used in the next step.
5 SCENE RECONSTRUCTION
The final goal of this work is the reconstruction of an
entire 3D scene based on a single color image. As
our reconstruction target, we use the 16
3
× 512 latent
blocks generated in section 4. We rely on the tree-
net architecture by Denninger et al. (Denninger and
Triebel, 2020) but adapt it to a smaller spatial output
resolution of 16 in contrast to 32.
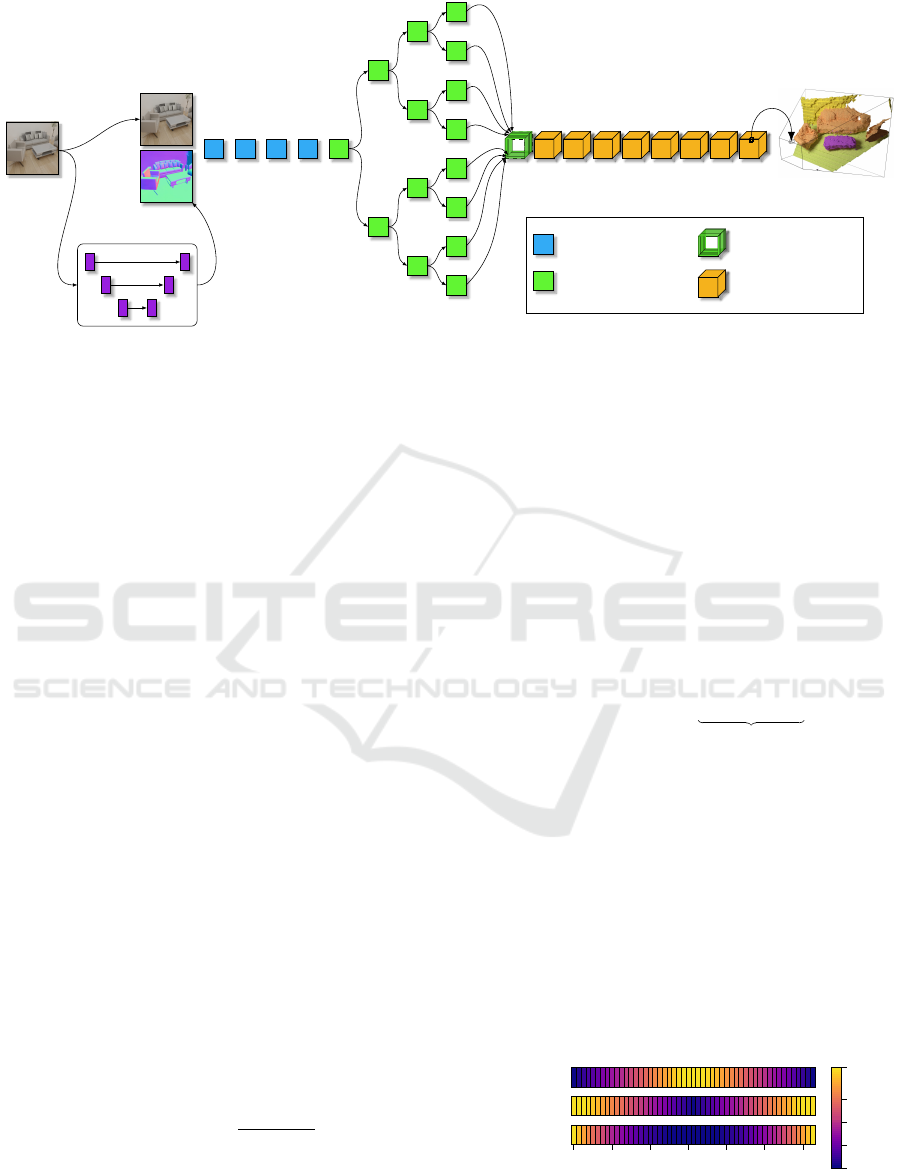
An overview of our network is given in fig. 4. The
input to our network is a color image and a surface
normal image as the normal image guides the recon-
struction of flat surfaces. During inference, this sur-
face normal image is generated by a simple U-Net
based on the color image, while during training, we
rely on the synthetic ground truth. After concatenat-
ing both inputs, it is forwarded through five convolu-
tions and max poolings to reduce the spatial resolu-
tion from 512 down to 16 and increase the number of
feature channels from 6 to 512. We can transform a
2D image into a 3D tensor using the tree-net archi-
tecture. Each path from the tree root to a leaf cor-
responds to a 3D depth slice of the camera frustum,
while each node uses two ResNet blocks, with two
convolutions each (He et al., 2016). This design en-
ables the network to learn specific feature sizes and
propagate this information to the correct slice posi-
tion. We then combine all leaves in 3D, where each
leaf is only responsible for a particular 3D slice in Z-
direction. The channels of such a leaf are distributed
over several 3D tensors, creating an output 3D voxel
with a size of 16
3
× 512. On this combined 3D out-
put, we perform eight 3D convolutions with 512 fil-
ters each to enable smoothing and cross-talk between
the single paths of the tree, avoiding that a failure
of one path decreases the performance of the whole.
We rely on inception layers to increase the receptive
field; however, we increase the dilation rate instead of
the filter size (Yu and Koltun, 2015; Denninger and
Triebel, 2020). So, we split the number of feature
channels for each convolution and use half with a di-
lation rate of 1 and the other half with 2.
3D Semantic Scene Reconstruction from a Single Viewport
19
Input
U-Net
512
2
6
256
2
32
128
2
64
64
2
64
32
2
128
16
2
256
16
2
256
16
2
256
16
2
256
16
3
512
16
3
512
16
3
512
16
3
512
16
3
512
16
3
512
16
3
512
16
3
512
16
3
512
reconstructed scene
for each 1
3
×
512 vector use
the decoder and
then unproject it
Conv2D + Pooling
2 × ResNet block
Combined 3D result
Conv3D
Figure 4: Our proposed architecture uses one image and reconstructs an entire 3D scene.
6 LOSS SHAPING
A crucial step to focus the attention of the network
on the relevant reconstruction targets is loss shaping
(Denninger and Triebel, 2020). Here, we increase the
loss in parts of the scene where the network should
perform well. This increase is necessary as the solu-
tion space we try to regress is enormous.
6.1 Scene Compression
We introduce three losses to improve the reconstruc-
tion accuracy for the scene compression. The first
one sharps the loss around the surface. The second
one increases the loss in relation to the distance to
the blocks’ boundaries, which reduces block artifacts.
And the last one ensures that the gradient is constant
over the reconstruction space.
Denninger et al. (Denninger and Triebel, 2020)
rely on a Gaussian distribution to strengthen the loss
around the surface. Instead, we design an inverse
function, which uses our surface loss weight θ
surface
and the truncation threshold σ, defined by the gener-
ation process in section 3. Here, y
tsdf
is the desired
output for a given point p, and t is the output gener-
ated by the network defined in section 4. Increasing
the loss if the current point p is close to a surface,
meaning that its y
tsdf
is close to zero. The results are
best if θ
surface
is set to 37.27 and ε to 0.001.
L
surface
= L
dist
·
θ
surface
· σ
|
y
tsdf
|
+ ε
(6)
Additionally, we increase the loss in relation to the
distance to the blocks’ boundaries. By determining
the closest distance along the axis of one point p to
the sides of the projection cube C . We do this by tak-
ing the minimum and maximum value of the point p
and comparing it to the boundary b. The closest dis-
tance d
cube
is used, and 1.0 is subtracted from it to
increase the loss as it approaches the boundary. The
final result L
boundary
is squared to sharpen the edges.
These are defined in eq. (7) and eq. (8), and visualized
in fig. 5. Here, the boundary factor b depends on the
block scaling defined in section 3.2.
d
min dist
= min
b + min
i∈[1,2,3]
p[i], b − max
i∈[1,2,3]
p[i]
(7)
L
boundary
= L
dist
· (1.0 − d
min dist
)
2
(8)
inverse distance
Combining all of them then results in our com-
bined loss L
combined
, which can be seen in eq. (9).
Here, the category weight θ
C
combines the two dif-
ferent loss heads. Our extensive search with 7.259
tests found that a value of 30.31 for θ
C
works best.
L
combined
= L
dist
+ L
surface
+ L
boundary
+ θ
C
· L
C
(9)
Our last addition to the loss ensures that the
sparse TSDF input points provided to the network
are smoothly interpolated. We propose to punish
high-frequency signals between two neighboring in-
d
min dist
inv. distance
L
boundary
-1.1 -0.7 -0.3 0.0
point value p[i]
0.3 0.6 1.0
0.00
0.25
0.50
0.75
1.10
Figure 5: The different results for the three parts defined in
eq. (7) and eq. (8) are shown here.
IMPROVE 2023 - 3rd International Conference on Image Processing and Vision Engineering
20

Table 1: Results of our TSDF compression method.
Method Prec Rec IOU CD
GT
Class
Acc.
Without L
surface
95.76 95.49 91.74 0.0034 99.57
With L
Gaussian
97.08 97.53 94.81 0.0030 99.65
Without L
boundary
98.98 98.94 97.92 0.0015 99.65
Without L
gradient
98.93 98.95 97.91 0.0013 97.73
With
|
l
|
= 256 98.83 98.76 97.63 0.0020 98.94
No categories 98.82 98.75 97.68 0.0013 X
Our method 99.00 98.96 97.93 0.0013 99.67
put points. For this, we add a loss if the gradient of the
point inputs in relation to the combined loss is bigger
than the euclidean distance between two points. This
loss can be seen in eq. (10), where (δL
combined
)/(δp)
is the gradient of the combined loss in relation to the
input point p, and g is the maximum value the gra-
dient can take, in our scenario g is one. We finally
scale this output with θ
gradient
to ensure that the gradi-
ent stays below the g, achieved by setting θ
gradient
to
1000.0.
L
gradient
= θ
gradient
· ReLU
δL
combined
δp
− g
(10)
Our training loss L
tsdf final
is the sum of the
L
combined
and L
gradient
. To show the effectiveness of
our losses, we evaluate them on voxel-based metrics
such as precision, recall, and IOU and also surface
metrics like the chamfer distance and the class accu-
racy in table 1. Removing our proposed L
surface
drasti-
cally hurts the performance on the IOU and the cham-
fer distance from the predicted mesh to the ground
truth, as it focuses the attention on the surface of the
objects. Our L
surface
performs better than the Gaus-
sian loss introduced by Denninger et al. (Denninger
and Triebel, 2020), redefined in eq. (11). In this test,
it only replaces the L
surface
.
L
Gaussian
= L
dist
· (N (0,0.25 · σ)(y
tsdf
) · 0.25 · σ)
(11)
The gains for L
boundary
and L
gradient
are smaller
but apparent in a visual inspection, e.g. artifacts are
visible on the boundaries without the L
boundary
. The
L
gradient
, on the other hand, takes care of flying surface
imperfections in free or occluded space, which re-
sult from high-frequency changes in the TSDF space.
When the latent vector size is reduced from 512 to
256, the classification error shows a large increase.
As we use these latent vectors as the regression tar-
gets for our scene reconstruction network, they form
the upper boundary of our final 3D scene reconstruc-
tion performance.
6.2 Scene Reconstruction
First, we make the process more dynamic than prior
solutions for scene reconstruction (Denninger and
Triebel, 2020) by precalculating a loss grid at a res-
olution of 256, which is dynamically mapped to the
loss values during training. This dynamic mapping
allows us to change the used loss values after gen-
eration. We also integrated the class value into the
precalculated loss value, allowing us to increase the
loss around objects in contrast to the floor, ceiling,
and walls in a scene.
We rely on the projected TSDF voxel grid gener-
ated in section 3, where we extract the classes for the
2,000,000 points and store them in a 3D grid with the
same 256 resolution as the TSDF voxel grid. The cat-
egory for each voxel is based on the majority of points
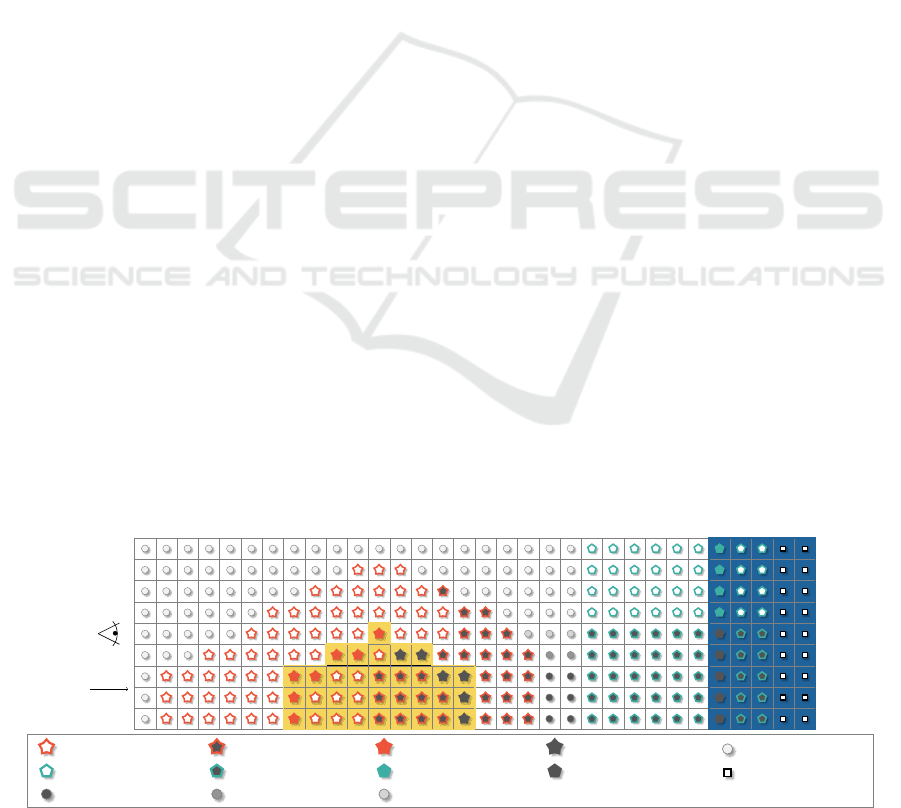
in this voxel. For detecting the free visible space, we
walk along the camera rays into the 3D voxel grid and
set all voxels to free until we hit an occupied one, as
can be seen by the white circles in fig. 6. This first
occupied voxel is set to true surface. From the free
voxel, we start a flood fill algorithm into the still unde-
fined and free areas. Based on the distance to the clos-
est free voxel k, we assign a free non-visible k value,
depicted by the gray circles in fig. 6. Here, k can be
between 0 and 150 values, roughly 59% percent of the
scene axis. Every occupied voxel we reach with the
flood fill algorithm is set to true non-visible surface.
To focus the attention more on the surface boundary,
we set the 32 values before and 16 after a true surface
to surface. We repeat this for the non-visible surface
values; see the non-filled stars and pentagons in fig. 6.
Instead of just increasing the loss along the view-
ing direction, we increase it in all directions, boosting
the loss around thin objects. We achieve this by iter-
ating over all true surface values and setting for each
of them in a radius of 16 all free values to surface val-
ues. This is repeated for the non-visible surface val-
ues as well. This change increases the loss, even if the
surface normal is nearly perpendicular to the viewing
direction. Lastly, we combine all surface values with
a category class. Additionally, we increase the loss
for non-floor or wall values by five, as objects have a
greater appearance variety than walls and floors. Fig-
ure 6 shows how the loss shapes around objects and
categories, and the legend contains the values we used
during training. By averaging from 256
3
down to 16
3
,
we can multiply our weight W
surface
with the absolute
difference between the network’s output o and the tar-
get labels y, resulting in our reconstruction loss:
L
rec
= W
surface
·
1
512
512
∑
i=0
|
o
i
− y
i
|
(12)
3D Semantic Scene Reconstruction from a Single Viewport
21
To ensure that the 3D structure is learned before
the 3D convolutions are applied, we introduce a tree
loss L
tree
. This loss takes the input to the first 3D layer
and passes it through a 3D convolution with a filter
size of 512 matching our y. This output o
tree
is then
compared to y the same way as for o in eq. (12) and
then multiplied with our W
surface
. The resulting L
tree
is scaled with a factor of 0.4 before combining it with
L
rec
to form our training loss L: L = L
rec
+ L
tree
· 0.4
7 DATASET & EXPERIMENTS
7.1 Replica and 3D-FRONT-dataset
Our approach is evaluated on the Replica-dataset
(Straub et al., 2019), while we only trained it on
data from the synthetic 3D-FRONT-dataset (Fu et al.,
2020b; Fu et al., 2020a). For our training, we cre-
ated 84,508 color- and predicted surface normal im-
ages and corresponding compressed voxel grids with
a matching loss weight θ
surface
. The camera poses in
the 3D-FRONT scenes, and the color and ground truth
surface normal images are generated using Blender-
Proc (Denninger et al., 2019). We focus on ensur-
ing that each camera’s view contains various objects
and that the overlap between two camera poses in the
same scene is small or non-existent by calculating the
distance between projected depth images of the re-
spective camera poses. We limit this maximal dis-
tance between two points in our two points clouds to
0.5m. After 50,000 tries, we reduce it to 0.25m. Fur-
ther, we had to remove 4,619 objects from the 16,563
objects in the 3D-FUTURE dataset, as they were ei-
ther not water-tight or the object normals point in dif-
ferent directions breaking the TSDF generation. We
design a simple U-Net architecture to generate the
predicted surface normal images by training it on the
3D-FRONT-dataset. For details on the U-Net archi-
tecture, see the code.
7.2 Category Reduction
As the overarching goal of this work is to reconstruct
scenes to enable navigation and planning for mobile
robots, we reduce the number of categories to ten be-
cause the difference between various cabinet types in
the 3D-FRONT-dataset is not vital to us. This re-
duction leads us to the following classes: void, table,
wall, bath, sofa, cabinet, bed, chair, floor, lighting.
7.3 Evaluation
We compare our method to Total3Dunderstanding by
Nie et al. (Nie et al., 2020), Panoptic 3D Scene Re-
construction (P3DSR) by Dahnert et al. (Dahnert
et al., 2021), and to SingleViewReconstruction (SVR)
by Denninger et al. (Denninger and Triebel, 2020).
Using the same camera intrinsics as them, we gen-
erated 20 images per Replica scene, resulting in 360
images. The Replica-dataset was selected as none of
the methods was trained on it, and it contains real-
world recorded scenes. We then compare the unpro-
jected meshes in meters using the chamfer distance
CD
GT
between the ground truth and the predicted
mesh, where we find for each point in the ground truth
the closest matching point in the prediction and av-
erage the distances between these matching points.
To calculate the chamfer distance to the prediction
CD
pred
, we switch the two meshes. Our results in ta-
ble 2 show that we achieve a CD
GT
of 10.53 cm and
an IOU of 69.45% on the Replica-dataset. We focus
here on the CD
GT
, as we are more interested in recon-
structing every object than by accident predicting too
much-occluded space, as missing an object might lead
to a collision during navigation. Important to note
here is that we only compare the reconstruction in a
range between 1 and 4 meters as defined in section 3.
However, P3DSR can predict further back than this,
but these results are not considered here. For SVR,
we also compare the voxel-based metrics for the oc-
cupied regions by applying the same Z-correction on
Camera
Z-axis
sofa s. : 250 sofa s.n.v. : 50 true sofa s. : 2500 true sofa s.n.v. : 500 free: 2
wall s. : 50 wall s.n.v. : 10 true wall s. : 500 true wall s.n.v. : 100 not reachable: 0.1
lower free n.v. : 0.5 half free n.v. : 0.75 upper free n.v. : 1.0 s.=surface n.v.=non-visible
Figure 6: A top-down 2D view, showing the sofa in yellow, and the wall in blue. The symbols determine the loss values.
IMPROVE 2023 - 3rd International Conference on Image Processing and Vision Engineering
22

Input
Our methodTotal3D P3DSR SVR GT
cam tilt 69.9
◦
cam tilt 62.4
◦
cam tilt 64.9
◦
cam tilt 58.1
◦
With GT
bounding boxes
no segmentation
Figure 7: Results on the Replica-dataset for four different color images. All methods only use a color image as an input. Our
method Our method shows the best reconstruction, followed by our other presented method SVR.
the voxel grid, as done on the points in eq. (3). This
ensures that the IOU in the cube better reflects the
actual scene reconstruction. Another metric is class
accuracy which is the amount of correctly classified
points, where we map every vertex of our true mesh
to the closest point in the prediction and check if they
share the same category. SVR is not evaluated on that,
as it does not provide a semantic segmentation. We
use the code and pre-trained weights by the authors
for all methods. All methods use only one color image
of the scene, except Total3Dunderstanding, which we
provide with the GT bounding boxes, to avoid affect-
ing the networks’ performance by our chosen bound-
ing box detector. A qualitative evaluation is shown in
fig. 7, where our method outperforms all other meth-
ods in the level of detail and overall reconstruction
performance. However, our method fails to correctly
classify the couch table as a table in the first and last
row and predicts a cabinet instead.
SVR and P3DSR are only trained with a fixed
camera tilt of 78.69
◦
and 90
◦
and a fixed camera
height of 1.55m and 90cm, respectively. However,
we evaluate with our validation images, which have a
camera tilt range of 45
◦
to 85
◦
and a camera height
of 1.45 to 1.85m, and show these results in table 2.
Furthermore, to not evaluate the training angle/height,
we regenerate our images at the same position in
the scene but now with a method-specific angle and
height. Our measured performance drops drastically
at 90
◦
, as we only trained up to 85
◦
. Additionally, at a
low height of 90 cm, most surfaces are perpendicular
to the viewing direction making it particularly hard
to predict their depth. Interestingly the performance
of P3DSR drops as well; we assume this is because
reconstructing at this angle is more challenging.
7.4 Results in the Wild
To show the performance of our method, we collected
images via different phone cameras in five homes and
show the results in fig. 8. The most remarkable result
is on the left in the second row, containing a dining
table surrounded by chairs. Even though the backside
of the right chair is missing, the network understood
that there must be a chair as the sitting area was recon-
structed, which is not visible in the single color im-
age. Generating a surface normal image, an encoded
3D scene, and decoding this 3D scene with a resolu-
tion of 256 on an Nvidia 3090 RTX takes
≈
0.9s, for
a resolution of 512, it takes
≈
4.2s.
3D Semantic Scene Reconstruction from a Single Viewport
23
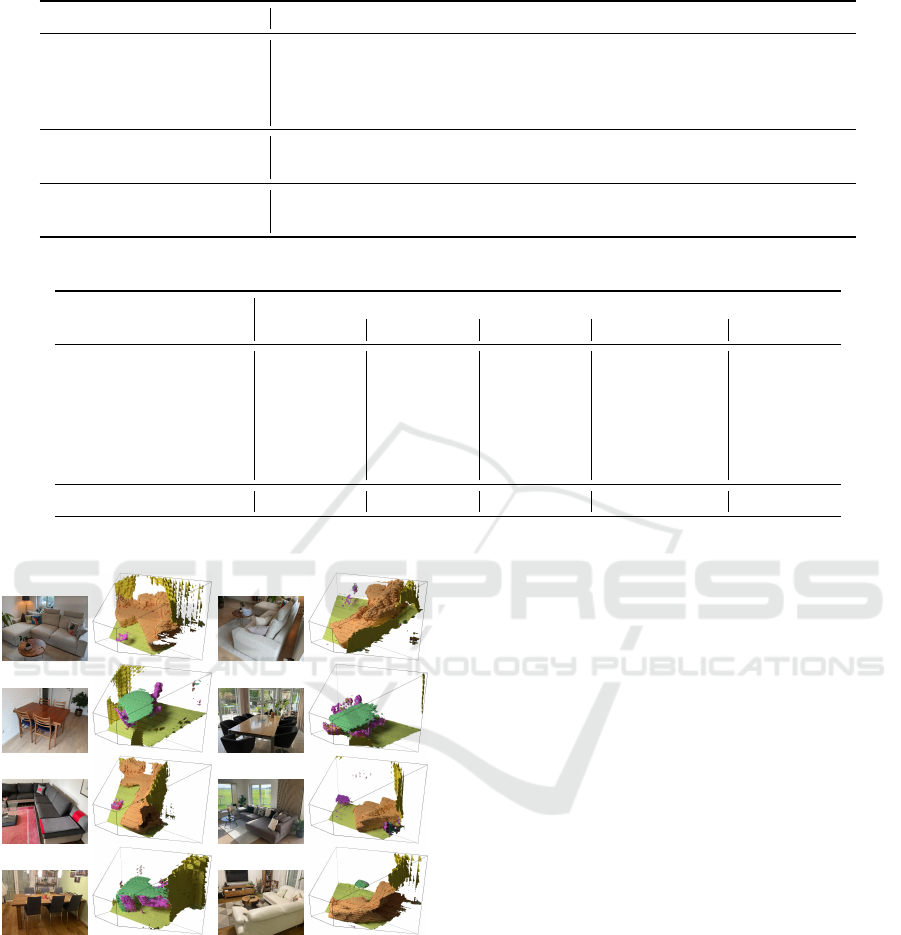
Table 2: Different methods evaluated on the real-world Replica-dataset.
Angle Method Precision Recall IOU CD
GT
CD
pred
Class Acc.
[45
◦
9 80
◦
] Total3D - - - 0.3057 0.3545 32.77
[45
◦
9 80
◦
] P3DSR - - - 0.1728 0.3144 17.49
[45
◦
9 80
◦
] SVR 75.62 60.85 48.28 0.4189 0.4319 X
[45
◦
9 80
◦
] Our method 85.30 79.41 69.45 0.1053 0.2331 66.78
78.69
◦
SVR 86.79 67.30 60.01 0.5168 0.3926 X
78.69
◦
Our method 82.84 76.65 65.46 0.1081 0.2526 64.86
90
◦
P3DSR - - - 0.1858 0.2692 10.74
90
◦
Our method 79.97 48.41 41.67 0.3051 0.3751 48.19
Table 3: Ablation study on the Replica-dataset with the GT and generated normals.
Ablation
Precision Recall IOU CD
GT
Class Acc.
GT gen GT gen GT gen GT gen GT gen
Reduced no. 3D filters 83.0 85.9 86.8 78.3 73.3 69.0 0.088 0.107 64.9 67.1
Without inception 84.2 85.1 84.4 77.0 72.6 67.2 0.085 0.110 62.9 63.6
Without wall weight 83.1 84.1 83.9 76.7 71.3 66.4 0.092 0.111 70.8 68.9
Tree height of two 84.5 85.5 83.5 76.7 72.1 67.5 0.086 0.112 67.5 67.0
Tree height of four 84.2 85.0 82.8 75.3 71.2 65.9 0.088 0.111 67.0 65.8
Without loss shaping 87.1 87.2 85.7 78.0 75.5 69.4 0.148 0.168 77.5 75.5
Our method 84.2 85.3 85.5 79.4 73.3 69.5 0.084 0.105 68.0 66.8
Figure 8: Our method in the wild. Eight images recorded in
five different homes and their 3D segmented reconstruction.
7.4.1 Ablation
We also performed various ablation studies to show
the effects of our design decisions in table 3. These
results show that our proposed network has the high-
est IOU and lowest CD
GT
value when using generated
normals. Reducing the number of 3D filters from 512
to 256 barely reduces the CD
GT
performance, indicat-
ing that a quicker method could be designed.
8 CONCLUSION
We presented a novel method to reconstruct and seg-
ment 3D scenes with only a single color image. For
this, we use a neural network to embed part of the
scene with an implicit TSDF representation, which
incorporates the distance and category of the closest
surface. These generated embedded latent vectors for
each part are then used as a target for our scene recon-
struction network. Together with our novel loss shap-
ing techniques, we outperform three current methods
on the challenging and realistic Replica-dataset by
nearly cutting the average measured chamfer distance
in half. Indicating that semantic segmentation and
scene reconstruction with only a single image is pos-
sible in challenging real-world environments while
training only on synthetic data.
REFERENCES
Barron, J. T., Mildenhall, B., Tancik, M., Hedman, P.,
Martin-Brualla, R., and Srinivasan, P. P. (2021). Mip-
nerf: A multiscale representation for anti-aliasing
neural radiance fields. International Conference on
Computer Vision. 2
Bo
ˇ
zi
ˇ
c, A., Palafox, P., Thies, J., Dai, A., and Nießner, M.
(2021). Transformerfusion: Monocular rgb scene re-
IMPROVE 2023 - 3rd International Conference on Image Processing and Vision Engineering
24

construction using transformers. Neural Information
Processing Systems. 2
Chabra, R., Lenssen, J. E., Ilg, E., Schmidt, T., Straub, J.,
Lovegrove, S., and Newcombe, R. (2020). Deep local
shapes: Learning local sdf priors for detailed 3d re-
construction. European Conference on Computer Vi-
sion. 1, 3
Chen, X., Zhang, Q., Li, X., Chen, Y., Feng, Y., Wang, X.,
and Wang, J. (2021a). Hallucinated neural radiance
fields in the wild. Conference on Computer Vision and
Pattern Recognition. 2
Chen, Z. and Zhang, H. (2021). Neural marching cubes.
ACM Transactions on Graphics. 1
Chen, Z., Zhang, Y., Genova, K., Fanello, S. R., Bouaziz,
S., H
¨
ane, C., Du, R., Keskin, C., Funkhouser, T. A.,
and Tang, D. (2021b). Multiresolution deep implicit
functions for 3d shape representation. International
Conference on Computer Vision. 1
Dahnert, M., Hou, J., Nießner, M., and Dai, A. (2021).
Panoptic 3d scene reconstruction from a single rgb im-
age. Neural Information Processing Systems. 2, 3, 8
Dasgupta, S., Fang, K., Chen, K., and Savarese, S. (2016).
Delay: Robust spatial layout estimation for cluttered
indoor scenes. In Conference on Computer Vision and
Pattern Recognition, pages 616–624, Las Vegas, NV,
USA. IEEE. 2
Davies, T., Nowrouzezahrai, D., and Jacobson, A. (2020).
On the effectiveness of weight-encoded neural im-
plicit 3d shapes. Arxiv. 1
Denninger, M., Sundermeyer, M., Winkelbauer, D., Zidan,
Y., Olefir, D., Elbadrawy, M., Lodhi, A., and Katam,
H. (2019). Blenderproc. Arxiv. 8
Denninger, M. and Triebel, R. (2020). 3d scene reconstruc-
tion from a single viewport. In European Conference
on Computer Vision. 1, 2, 3, 4, 5, 6, 7, 8
Fu, H., Cai, B., Gao, L., Zhang, L., Li, J. W. C., Xun, Z.,
Sun, C., Jia, R., Zhao, B., and Zhang, H. (2020a). 3d-
front: 3d furnished rooms with layouts and semantics.
International Conference on Computer Vision. 8
Fu, H., Jia, R., Gao, L., Gong, M., Zhao, B., Maybank, S.,
and Tao, D. (2020b). 3d-future: 3d furniture shape
with texture. International Conference on Computer
Vision. 8
Gkioxari, G., Malik, J., and Johnson, J. (2019). Mesh r-cnn.
International Conference on Computer Vision. 2
He, K., Zhang, X., Ren, S., and Sun, J. (2016). Deep resid-
ual learning for image recognition. In Conference on
Computer Vision and Pattern Recognition, pages 770–
778. 5
Jiang, C. M., Sud, A., Makadia, A., Huang, J., Nießner, M.,
and Funkhouser, T. (2020). Local implicit grid rep-
resentations for 3d scenes. Conference on Computer
Vision and Pattern Recognition. 1
Kuo, W., Angelova, A., Lin, T.-Y., and Dai, A. (2020).
Mask2cad: 3d shape prediction by learning to seg-
ment and retrieve. European Conference on Computer
Vision. 2
Lorensen, W. E. and Cline, H. E. (1987). Marching
cubes: A high resolution 3d surface construction al-
gorithm. In Computer graphics and interactive tech-
niques, SIGGRAPH ’87, page 163–169, New York,
NY, USA. Association for Computing Machinery. 1
Martin-Brualla, R., Radwan, N., Sajjadi, M. S. M., Barron,
J. T., Dosovitskiy, A., and Duckworth, D. (2020). Nerf
in the wild: Neural radiance fields for unconstrained
photo collections. Conference on Computer Vision
and Pattern Recognition. 2
Mildenhall, B., Hedman, P., Martin-Brualla, R., Srinivasan,
P., and Barron, J. T. (2021). Nerf in the dark: High
dynamic range view synthesis from noisy raw images.
Conference on Computer Vision and Pattern Recogni-
tion. 2
Mildenhall, B., Srinivasan, P. P., Tancik, M., Barron, J. T.,
Ramamoorthi, R., and Ng, R. (2020). Nerf: Repre-
senting scenes as neural radiance fields for view syn-
thesis. Communications of the ACM. 2
Nie, Y., Han, X., Guo, S., Zheng, Y., Chang, J., and Zhang,
J. J. (2020). Total3dunderstanding: Joint layout, ob-
ject pose and mesh reconstruction for indoor scenes
from a single image. Conference on Computer Vision
and Pattern Recognition. 8
Oechsle, M., Peng, S., and Geiger, A. (2021). UNISURF:
unifying neural implicit surfaces and radiance fields
for multi-view reconstruction. International Confer-
ence on Computer Vision. 2
Ren, Y., Chen, C., Li, S., and Kuo, C. C. J. (2016). A coarse-
to-fine indoor layout estimation (cfile) method. Asian
Conference on Computer Vision. 2
Shin, D., Ren, Z., Sudderth, E. B., and Fowlkes, C. C.
(2019). 3d scene reconstruction with multi-layer depth
and epipolar transformers. International Conference
on Computer Vision. 2
Song, S., Yu, F., Zeng, A., Chang, A. X., Savva, M., and
Funkhouser, T. (2016). Semantic scene completion
from a single depth image. Conference on Computer
Vision and Pattern Recognition. 2
Straub, J., Whelan, T., Ma, L., Chen, Y., Wijmans, E.,
Green, S., Engel, J. J., Mur-Artal, R., Ren, C., Verma,
S., Clarkson, A., Yan, M., Budge, B., Yan, Y., Pan,
X., Yon, J., Zou, Y., Leon, K., Carter, N., Briales, J.,
Gillingham, T., Mueggler, E., Pesqueira, L., Savva,
M., Batra, D., Strasdat, H. M., Nardi, R. D., Goe-
sele, M., Lovegrove, S., and Newcombe, R. (2019).
The replica dataset: A digital replica of indoor spaces.
Arxiv. 8
Tancik, M., Srinivasan, P. P., Mildenhall, B., Fridovich-
Keil, S., Raghavan, N., Singhal, U., Ramamoorthi,
R., Barron, J. T., and Ng, R. (2020). Fourier features
let networks learn high frequency functions in low di-
mensional domains. Neural Information Processing
Systems. 4
Wang, P., Liu, L., Liu, Y., Theobalt, C., Komura, T., and
Wang, W. (2021). Neus: Learning neural implicit sur-
faces by volume rendering for multi-view reconstruc-
tion. Arxiv. 2
Xu, Q., Xu, Z., Philip, J., Bi, S., Shu, Z., Sunkavalli, K., and
Neumann, U. (2022). Point-nerf: Point-based neural
radiance fields. Conference on Computer Vision and
Pattern Recognition. 2
3D Semantic Scene Reconstruction from a Single Viewport
25

Yao, S., Yang, F., Cheng, Y., and Mozerov, M. G. (2021).
3d shapes local geometry codes learning with sdf. In-
ternational Conference on Computer Vision. 1, 3
Yariv, L., Gu, J., Kasten, Y., and Lipman, Y. (2021). Volume
rendering of neural implicit surfaces. Neural Informa-
tion Processing Systems. 2
Yifan, W., Rahmann, L., and Sorkine-Hornung, O. (2021).
Geometry-consistent neural shape representation with
implicit displacement fields. Arxiv. 1
Yu, F. and Koltun, V. (2015). Multi-scale context aggrega-
tion by dilated convolutions. Arxiv. 5
Zhang, C., Cui, Z., Zhang, Y., Zeng, B., Pollefeys, M., and
Liu, S. (2021a). Holistic 3d scene understanding from
a single image with implicit representation. Confer-
ence on Computer Vision and Pattern Recognition. 2
Zhang, J., Yao, Y., and Quan, L. (2021b). Learning signed
distance field for multi-view surface reconstruction.
International Conference on Computer Vision. 2
IMPROVE 2023 - 3rd International Conference on Image Processing and Vision Engineering
26
