
3D Object Detection for Autonomous Driving: A Practical Survey
´
Alvaro Ramajo-Ballester
a
, Arturo de la Escalera Hueso
b
and Jos
´
e Mar
´
ıa Armingol Moreno
c
Intelligent Systems Lab, University Carlos III de Madrid, Spain
Keywords:
3D Object Detection, Autonomous Driving, Deep Learning.
Abstract:
Autonomous driving has been one of the most promising research lines in the last decade. Although still far
off the sought-after level 5, the research community shows great advancements in one of the most challenging
tasks: the 3d perception. The rapid progress of related fields like Deep Learning is one the reasons behind this
success. This enables and improves the processing algorithms for the input data provided by LiDAR, cameras,
radars and such other devices used for environment perception. With such growing knowledge, reviewing
and structuring the state-of-the-art solutions becomes a necessity in order to correctly address future research
directions. This paper provides a comprehensive survey of the progress of 3D object detection in terms of
sensor data, available datasets, top-performing architectures and most notable frameworks that serve as a
baseline for current and upcoming works.
1 INTRODUCTION
The field of autonomous driving, which aspires to
provide the ability for vehicles to move safely with
little to no human intervention, has advanced quickly
in recent years. With the potential to reduce human
error and improve road safety, autonomous driving
techniques have been widely used in a variety of situ-
ations, such as self-driving vehicles in controlled sce-
narios (Marin-Plaza et al., 2021), delivery robots, etc.
Environment perception, a crucial element of
these kind of systems, aids autonomous vehicles in
understanding their surroundings through sensory in-
put. Perception systems typically use multi-modality
data as input (RGB images from cameras, point
clouds from LiDAR, etc.) to predict the geometry
and semantic details of significative elements on the
road. As deep learning techniques in computer vi-
sion have advanced (Ramajo-Ballester et al., 2022),
3D object detection algorithms have evolved quickly.
The proposed solutions follow very diverse method-
ologies, data distributions and evaluation metrics.
To overcome this lack of common ground, this
work aims to gather the most notable approaches to
offer a broad view of the current state of the art. To
achieve that, this survey tries to build on top of al-
ready existing ones (Qian et al., 2022; Mao et al.,
a
https://orcid.org/0000-0001-9425-9408
b
https://orcid.org/0000-0002-2618-857X
c
https://orcid.org/0000-0002-3353-9956
2022), updating their results with the latest and best
performing models accross several benchmarks.
Specifically in the last years, a new research ap-
proach is emerging in this context, which is detect-
ing these 3D objects from an infrastructure point of
view. With sensors mounted several meters above the
ground, the field of view increases significantly while
also reducing occlusions between the elements on the
road and the environment. This, of course, comes
with its own challenges, like vehicle to infrastructure
communication, protocol standardization across dif-
ferent devices and other related tasks that have to be
taken into account.
2 BACKGROUND
2.1 Foundations / Basic Concepts
3D object detection aims to predict the attributes of
3D objects in driving scenarios from sensory inputs.
In that context, let X denote input data, LiDAR or
RGB images, for instance, and F denote a detector
parameterized by θ . A general formula for 3D object
detection can be represented as follows:
B = F(X ; θ ) (1)
where B = {B
1
,B
2
,...,B
n
} is a set of n 3D objects in a
scene. In this task, representing a 3D object is critical
64
Ramajo-Ballester, Á., de la Escalera Hueso, A. and Armingol Moreno, J.
3D Object Detection for Autonomous Driving: A Practical Survey.
DOI: 10.5220/0011748400003479
In Proceedings of the 9th International Conference on Vehicle Technology and Intelligent Transport Systems (VEHITS 2023), pages 64-73
ISBN: 978-989-758-652-1; ISSN: 2184-495X
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
since it affects what data should be provided for the
subsequent prediction and planning processes. Typi-
cally, a 3D item is shown as a 3D cuboid that contains
this object. This enclosure can be described by its 8
corners (Chen et al., 2017), 4 corners and heights (Ku
et al., 2018) or, usually, by the 7 parameters for an
oriented bounding box (Lang et al., 2019; Weng and
Kitani, 2019) in eq. 2
B = {x,y,z,l,w, h,θ ,c} (2)
where (x,y, z) is the center coordinates of that cuboid;
(l,w,h) are its length, width and height, respectively;
θ , yaw angle in the ground plane and c, the corre-
sponding class, say, car, pedestrian, etc.
2.2 Sensors
Raw data for 3D object detection can be provided by a
wide variety of sensors. The two sensor types that are
most frequently used are cameras and LiDAR (Light
Detection And Ranging) sensors.
Cameras are economical, accessible, and capa-
ble of capturing scene details from a specific angle.
They produce images X
cam
= R
W ×H×3
, where W, H
are the image width and height and each pixel has
3 RGB channels. Although cheap, cameras have in-
herent limitations when it comes to 3D object detec-
tion. First of all, they are only capable of capturing vi-
sual data so they cannot obtain the three-dimensional
structure of a scene. To overcome this problem, stereo
cameras use matching algorithms to align correspon-
dences in both left and right pictures for depth recov-
ery (Chang and Chen, 2018).
On the other hand, LiDAR sensors (Velodyne,
Ouster, RoboSense) can be used to get fine-grained
3D structures of a scene by producing a great number
of laser beams and measuring their reflective informa-
tion. A range image X
lid
∈ R
m×n×3
can be produced
by a LiDAR sensor using m beams and n readings
in one scan cycle. Each pixel has 3 channels, cor-
responding to range, azimuth and inclination in the
spherical coordinate system. Through the conversion
of spherical coordinates into Cartesian coordinates,
range images can be further transformed into point
clouds.
2.3 Datasets
As the data-driven era progresses, the accessibility of
large-scale datasets has been continuously fostering
the community. Some of the most notable and pub-
licly accessible datasets related to autonomous driv-
ing have been included. KITTI (Geiger et al., 2012;
Geiger et al., 2013), Waymo Open (Sun et al., 2020)
and nuScenes (Caesar et al., 2020) datasets are the
typical examples and stand out as the most popular
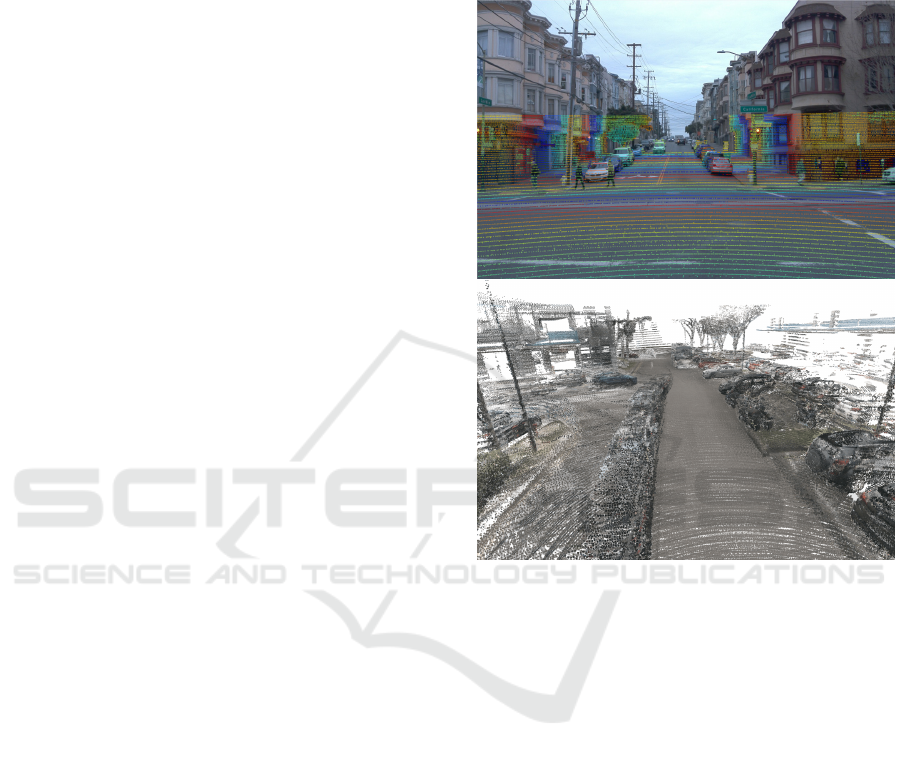
ones, among others. An example of the last two is
shown in fig. 1 and a more detailed comparison is pre-
sented in table 1.
Figure 1: Waymo (above) and nuScenes (below) datasets
examples.
KITTI Dataset. This is the pioneer dataset when it
comes to 3D object detection was released in 2012.
It contains the LiDAR and visual information from
15k frames, with more than 200k 3D annotations from
8 classes (car, van, truck, pedestrian, person, cyclist,
tram, misc), although just car, pedestrian and cyclist
labels are considered for the online scoreboard eval-
uation. Three difficulty levels (Easy, Moderate, and
Hard) are introduced depending on the height of 2D
bounding boxes, the level of occlusion and truncation.
Waymo Open. Waymo annotates 12M 3d bound-
ing boxes among more than 200k frames. It com-
prises 1150 sequences (or scenes) over 4 classes, out
of which only 3 correspond to the KITTI classes.
nuScenes. It manually labels 1.4M boxes among 40K
frames. It collects 1000 sequences over 23 classes but
only 10 of those are considered for detection.
Only the training and validation labels are avail-
able, as none of them offer the testing ones. Re-
searchers are required to submit their predictions to
the online leaderboard server for assessing the test
3D Object Detection for Autonomous Driving: A Practical Survey
65

set. It is important to note that, in contrast to
KITTI, which only collects data on sunny days, both
nuScenes and Waymo Open acquire their data under
a variety of weather (such as rainy, foggy, and snowy
conditions) and lighting (daytime and nighttime).
In the last years, many dataset publications have
been released with infrastructure-mounted sensors,
like Rope3D (Ye et al., 2022b), A9 Dataset (Creß
et al., 2022), IPS300+ (Wang et al., 2022) and DAIR-
V2X (Yu et al., 2022). The latter is one of the
most complete ones because it released three ver-
sions: Vehicle Dataset (DAIR-V2X-V), with 22325
LiDAR and image frames; Infrastructure Dataset
(DAIR-V2X-I), including 10084 point cloud and im-
age frames and Cooperative Dataset (DAIR-V2X-C),
with 18330 data frames from infrastructure and 20515
from vehicle for Vehicle-Infrastructure Cooperative
(VIC) 3D object detection.
2.4 Evaluation Metrics
The primary performance metric for 3D object de-
tection is Average Precision (AP), which shares the
same philosophy as its 2D counterparts (Everingham
et al., 2010). Before identifying the subtle connec-
tions and differences of dataset-specific AP adopted
among widely used benchmarks, the vanilla form of
the AP metric is defined as follows:
AP =
Z
1
0
max{P(r
′
|r
′
≥ r)}dr (3)
where P(r) is the precision-recall curve; r
′
, each posi-
ble recall value and r the recall variable over which
the integral is calculated. When calculating preci-
sion and recall, the main distinction with the 2D AP
metric is the matching criterion between predictions
and ground truths. In that regard, KITTI proposes
two commonly-used AP metrics: AP3D and APBEV.
AP3D matches the predicted objects to the respec-
tive ground truths if the 3D Intersection over Union
(3D IoU) of two cuboids is above a certain threshold
whereas APBEV is based on the IoU of two cuboids
from the bird’s-eye view (BEV IoU).
However, accurately calculating this area is not
trivial, PASCAL VOC (Everingham et al., 2010) pro-
posed an alternative metric: the interpolated AP|
R
N
.
It is formulated as the mean precision computed for
each recall subset (R) of N evenly spaced recall lev-
els, from r
0
= 0 to r
1
= 1:
AP|
R
N
=
1
N
∑
r∈R
P(r) (4)
where R = [r
0
,r
0
+
r
1
−r
0
N−1
,r
0
+
2(r
1
−r
0
)
N−1
,. .. ,r
1
] and
P(r) = max
r
′
:r
′
≥r
P(r
′
).
KITTI Benchmark (Geiger et al., 2012). KITTI
used the interpolated AP|
R
11
before changing to
AP|
R
40
as suggested in (Simonelli et al., 2019). That
resulted in a more fair comparison of the scores. It
holds two separate leaderboards for 3D object detec-
tion and BEV detection. As previously said, it dif-
ferentiates three levels of difficulty: easy, moderate
and hard, regarding the occlusion and height of the
bounding boxes.
Waymo Benchmark (Sun et al., 2020). Similarly,
it proposes interpolated AP
R
21
and Average Preci-
sion weighted by heading (APH). To calculate that,
Waymo evaluates on 21 evenly spaced recall levels
(r
0
= 0, r
1
= 1, N = 21), with IOU threslholds of 0.7
for vehicles and 0.5 for pedestrians and cyclists. For
APH, the true positives are weighted by the heading
accuracy:
w
h
= min(|
ˆ
θ − θ |,2π − |
ˆ
θ − θ |)/π (5)
where
ˆ
θ and θ are the predicted and ground truth
azimuth, respectively.Two levels of dificulty are in-
cluded in the benchmark: L1 for bounding boxes with
more than five lidar points and L2 for those with be-
tween one and five points.
nuScenes Benchmark (Caesar et al., 2020). It uses
a custom metric called NuScenes Detection Score
(NDS). In order to compute it, a set of error met-
rics are defined for measuring translation (ATE), scale
(ASE), orientation (AOE), velocity (AVE) and at-
tribute errors (AAE). All of them have a 2m center
distance threshold. The errors (ε ) are converted to
scores as shown in eq. 6.
s
i
= max(1 − ε
i
,0) (6)
These metrics are weighted afterwards to calculate
de NDS:
NDS =
1
10
"
5mAP +
∑
i
s
i
#
(7)
where mAP is calculated by a BEV center distance
with thresholds 0.5m, 1m, 2m, 4m (Qian et al., 2022).
3 REVIEW AND ANALYSIS
The core section of this work brings together some of
the most notable contributions for the task of 3D ob-
ject detection in autonomous driving context. It starts
with camera-based methods, which only make use of
visual information from the surroundings, either with
a single or multiple views. After that, LiDAR-based
approaches are reviewed, showing a clearly superior
VEHITS 2023 - 9th International Conference on Vehicle Technology and Intelligent Transport Systems
66
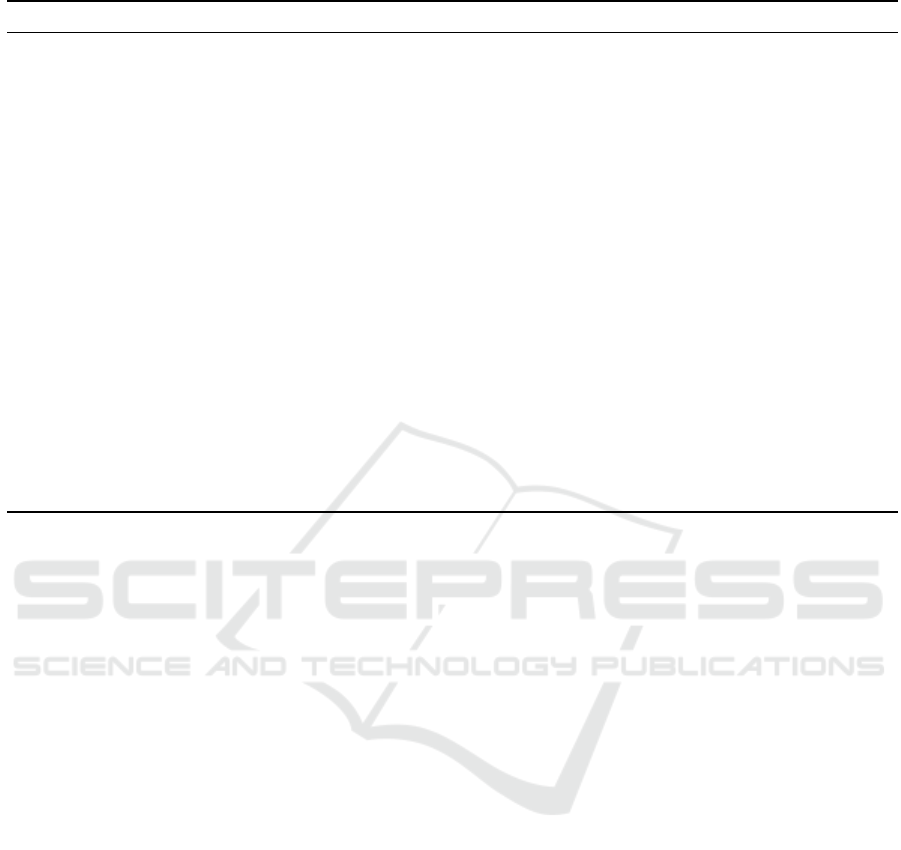
Table 1: Comparison between publicly available datasets for 3D object detection, sorted by year.
Dataset LiDAR Images 3D annot. Cl. Night/Rain View
KITTI (Geiger et al., 2012) 15k 15k 200k 8 No/No Onboard
Ko-FAS (Strigel et al., 2014) 39k 19.4k - - -/- Infrastructure
KAIST (Choi et al., 2018) 8.9k 8.9k - 3 Yes/No Onboard
ApolloScape (Huang et al., 2019) 20k 144k 475k 6 -/- Onboard
H3D (Patil et al., 2019) 27k 83k 1.1M 8 No/No Onboard
Lyft L5 (Kesten et al., 2019) 46k 323k 1.3M 9 No/No Onboard
Argoverse (Chai et al., 2021) 44k 490k 993k 15 Yes/Yes Onboard
A*3D (Pham et al., 2020) 39k 39k 230k 7 Yes/Yes Onboard
A2D2 (Geyer et al., 2020) 12.5k 41.3k - 14 -/- Onboard
nuScenes (Caesar et al., 2020) 400k 1.4M 1.4M 23 Yes/Yes Onboard
Waymo Open (Sun et al., 2020) 230k 1M 12M 4 Yes/Yes Onboard
AIODrive (Weng et al., 2020) 250k 250k 26M - Yes/Yes Virtual onboard
BAAI-VANJEE (Yongqiang et al., 2021) 2.5k 5k 74k 12 Yes/Yes Infrastructure
PandaSet (Xiao et al., 2021) 8.2k 49k 1.3M 28 Yes/Yes Onboard
KITTI-360 (Liao et al., 2022) 80k 300k 68k 37 -/- Onboard
Argoverse 2 Sensor (Wilson et al., 2021) ∼150k ∼1M - 30 Yes/Yes Onboard
ONCE (Mao et al., 2021) 1M 7M 417k 5 Yes/Yes Onboard
Cirrus (Wang et al., 2021) 6.2k 6.2k - 8 -/- Onboard
Rope3D (Ye et al., 2022b) - 50k 1.5M 12 Yes/Yes Infrastructure
A9 Dataset (Creß et al., 2022) 1.7k 5.4k 215k 8 Yes/Yes Infrastructure
IPS300+ (Wang et al., 2022) 28k 57k 4.5M 7 Yes/- Infrastructure
DAIR-V2X (Yu et al., 2022) 71k 71k 1.2M 10 -/- Onboard / Infrast.
performance than its image-only counterpart. Fusion-
ing both sensors, multi-modal techniques offer the
best results. These metrics are finally compared in
section 3.4.
3.1 Image-Based Methods
A simple method for monocular 3D object detection,
inspired by 2D detection techniques, is to directly
regress the 3D box parameters from images using a
convolutional neural network. This regression tech-
niques can be fully trained and normally incorporate
designs from the 2D detection network architectures.
This methods range from anchor-based ap-
proaches, where pre-defined 3D bounding boxes are
predicted for posterior filtering and refinement (Luo
et al., 2021; Kumar et al., 2021); anchor-free models,
which predict the 3D objects attributes passing the
images through multiple and separate heads (Read-
ing et al., 2021; Zhou et al., 2021); stereo-based tech-
niques, where depth is estimated with pixel disparity
across images (Chang and Chen, 2018; Hartley and
Zisserman, 2003) or from temporal and multi-view
images, where the temporal information is leveraged
to improve 3D object detection (Liu et al., 2022a; Liu
et al., 2022b; Rukhovich et al., 2022).
3.2 LiDAR-Based Methods
This section covers those models using point clouds
or range images for detection. They differ mainly on
the data representations: point, voxel and pillar.
3.2.1 Point-Based Methods
Point cloud sampling and feature learning are the two
fundamental elements of a point-based 3D object de-
tector. These methods typically inherit the success of
deep learning techniques on point clouds (Mao et al.,
2019; Chen et al., 2022b; Chen et al., 2022a) and
propose a variety of architectures to detect 3D ob-
jects directly from raw points. Point clouds are first
forwarded through a point-based backbone network,
where they are gradually sampled and the operators
learn the features. Then, using the points and fea-
tures from the downsampled data, 3D bounding boxes
are predicted. For this kind of representation, (Zhang
et al., 2022) offers an uncertainty estimator to take
into account in the optimization process.
3.2.2 Voxel-Based Methods
Voxels are 3D cubes and contain points inside voxel
cells. Most voxel cells in the 3D space are empty
and lack any points due to the sparse distribution
of the point cloud. Practical applications only store
and use the non-empty voxels for feature extraction
3D Object Detection for Autonomous Driving: A Practical Survey
67

Table 2: Comparison of the state-of-the-art 3D detection mAP on KITTI test set, sorted by vehicle moderate difficulty.
Vehicle Pedestrian Cyclist
Model Easy Mod Hard Easy Mod Hard Easy Mod Hard
SFD (Wu et al., 2022b) 91.73 84.76 77.92 - - - - - -
CasA++ (Wu et al., 2022a) 90.68 84.04 79.69 56.33 49.29 46.70 87.76 73.79 66.94
GraR-VoI (Yang et al., 2022a) 91.89 83.27 77.78 - - - - - -
GLENet-VR (Zhang et al., 2022) 91.67 83.23 78.43 - - - - - -
VPFNet (Zhu et al., 2022) 91.02 83.21 78.20 - - - - - -
BtcDet (Xu et al., 2022) 90.64 82.86 78.09 - - - 82.81 68.68 61.81
DVF-V (Mahmoud et al., 2022) 89.40 82.45 77.56 - - - - - -
RDIoU (Sheng et al., 2022) 90.65 82.30 77.26 - - - - - -
Focals Conv-F (Chen et al., 2022c) 90.55 82.28 77.59 - - - - - -
SASA (Chen et al., 2022a) 88.76 82.16 77.16 - - - - - -
VoxSeT (He et al., 2022) 88.53 82.06 77.46 - - - - - -
Table 3: Comparison of the state-of-the-art 3D detection methods on Waymo test set, sorted by vehicle L2 mAPH.
Vehicle Pedestrian Cyclist
L1 L2 L1 L2 L1 L2
Model mAP mAPH mAP mAPH mAP mAPH mAP mAPH mAP mAPH mAP mAPH
MPPNetEns-MMLab (Chen et al., 2022b) 87.77 87.37 81.33 80.93 87.92 85.15 82.86 80.14 80.74 79.90 78.54 77.73
BEVFusion-TTA (Liu et al., 2022c) 87.96 87.58 81.29 80.92 87.64 85.04 82.19 79.65 82.53 81.67 80.17 79.33
LidarMultiNet-TTA (Ye et al., 2022a) 87.64 87.26 80.73 80.39 87.75 85.07 82.48 79.86 82.77 81.84 80.50 79.59
DeepFusion-Ens (Li et al., 2022b) 86.45 86.09 79.43 79.09 86.14 83.77 80.88 78.57 80.53 79.80 78.29 77.58
AFDetV2-Ens (Hu et al., 2022) 85.80 85.41 78.71 78.34 85.22 82.16 79.71 76.75 81.20 80.30 78.70 77.83
CenterFormer (Zhou et al., 2022) 85.36 84.94 78.68 78.28 85.22 82.48 80.09 77.42 76.21 75.32 74.04 73.17
VISTA (Deng et al., 2022) 81.70 81.30 74.40 74.00 81.40 78.30 75.50 72.50 74.90 73.90 72.50 71.60
Graph-CE (Yang et al., 2022a) 80.77 80.28 72.55 72.10 82.35 76.64 74.44 69.02 75.28 74.21 72.52 71.49
BtcDet (Xu et al., 2022) 78.58 78.06 70.10 69.61 - - - - - - - -
RDIoU (Sheng et al., 2022) 78.40 78.00 69.50 69.10 - - - - - - - -
GLENet-VR (Zhang et al., 2022) 77.32 76.85 69.68 68.97 - - - - - - - -
TransFusion (Bai et al., 2022) - - - 65.10 - - - 64.00 - - - 67.40
DVF-V (PV-RCNN) (Mahmoud et al., 2022) 67.62 67.09 62.66 62.17 - - - - - - - -
Table 4: Comparison of the state-of-the-art 3D detection methods on nuScenes test set. CV stands for construction vehicle
and TC, traffic cone.
Model mAP NDS Car Truck Bus Trailer CV Ped Motor Bycicle TC Barrier
DeepInteraction-e (Yang et al., 2022b) 75.6 76.3 88.3 64.3 74.2 66.0 44.7 92.5 85.4 66.4 90.9 83.5
BEVFusion-e (Liu et al., 2022c) 75.0 76.1 90.5 65.8 74.2 67.4 42.6 91.8 84.4 62.9 89.4 81.1
Focals Conv-F (Chen et al., 2022c) 70.1 73.6 87.5 60.0 69.9 64.0 32.6 89.0 81.1 59.2 85.5 71.8
BEVFusion (Liang et al., 2022) 71.3 73.3 88.5 63.1 72.0 64.7 38.1 90.0 75.2 56.5 86.5 78.3
MSMDFusion-T (Jiao et al., 2022) 70.8 73.2 87.9 61.6 70.0 64.4 38.1 89.7 73.9 56.6 87.1 79.0
MDRNet-L (Huang et al., 2022) 68.4 72.8 87.9 58.5 67.3 64.1 30.2 89.0 77.0 50.7 85.0 74.7
AutoAlignV2 (Chen et al., 2022d) 68.4 72.4 87.0 59.0 69.3 59.3 33.1 87.6 72.9 52.1 85.1 78.0
TransFusion (Bai et al., 2022) 68.9 71.7 87.1 60.0 68.3 60.8 33.1 88.4 73.6 52.9 86.7 78.1
LidarMultiNet (Ye et al., 2022a) 67.0 71.6 86.9 57.4 64.7 61.0 31.5 87.2 75.3 47.6 85.1 73.5
UVTR-Multi. (Li et al., 2022a) 67.1 71.1 87.5 56.0 67.5 59.5 33.8 86.3 73.4 54.8 79.6 73.0
VISTA (Deng et al., 2022) 63.7 70.4 84.7 54.2 64.0 55.0 29.1 83.6 71.0 45.2 78.6 71.8
AFDetV2 (Hu et al., 2022) 62.4 68.5 86.3 54.2 62.5 58.9 26.7 85.8 63.8 34.3 80.1 71.0
SASA (Chen et al., 2022a) 45.0 61.0 76.8 45.0 66.2 36.5 16.1 69.1 39.6 16.9 29.9 53.6
(Rukhovich et al., 2022; Wu et al., 2022a; Xu et al.,
2022; Zhou et al., 2022; Huang et al., 2022). Some of
the most recent contributions use an anchor-free ap-
proach (Hu et al., 2022), a transformer-based back-
bone (He et al., 2022), global context pooling (Ye
et al., 2022a) or offer a plug-in module for rotation-
decoupled IoU optimization (Sheng et al., 2022).
3.2.3 Pillar-Based Methods
In pillars, the voxel size is special since it is unlimited
in the vertical direction. Through the use of a Point-
Net [207], pillar features can be merged from points
and then dispersed again to create a 2D BEV image
for feature extraction. The pillar representation was
first introduced in PointPillars (Lang et al., 2019), and
VEHITS 2023 - 9th International Conference on Vehicle Technology and Intelligent Transport Systems
68

Table 5: Development frameworks used in all the reviewed works. PC stands for point cloud; I, for monocular image and ST,
for stereo image.
Model Year Mode Code
SFD 2022 PC+I OpenPCDet
CasA++ 2022 PC OpenPCDet
GraR-VoI 2022 PC+I MMDetection3D + OpenPCDet
GLENet-VR 2022 PC -
VPFNet 2022 PC+ST OpenPCDet
BtcDet 2022 PC OpenPCDet
DVF-V 2022 PC+I -
RDIoU 2022 PC OpenPCDet
Focals Conv-F 2022 PC+I OpenPCDet + CenterPoint
SASA 2022 PC OpenPCDet
VoxSeT 2022 PC OpenPCDet
DeepInteraction-e 2022 PC+I MMDetection3D
BEVFusion 2022 PC+I MMDetection3D
BEVFusion (2) 2022 PC+I MMDetection3D + CenterPoint
MSMDFusion-T 2022 PC+I MMDetection3D + TransFusion
MDRNet-L 2022 PC -
AutoAlignV2 2022 PC+I MMDetection3D
TransFusion 2022 PC+I MMDetection3D + CenterPoint
LidarMultiNet 2022 PC -
TransFusion-L 2022 PC -
UVTR-Multimodality 2022 PC+I MMDetection3D + Det3D
VISTA 2022 PC Det3D + OpenPCDet + CenterPoint
AFDetV2-Ens 2022 PC -
MPPNet 2022 PC OpenPCDet
DeepFusion-Ens 2022 PC+I Lingvo
CenterFormer 2022 PC CenterPoint
was then developed further in (Fan et al., 2022), as
shown in (Mao et al., 2022).
3.3 Multi-Modal Methods
For 3D object detection, camera and LiDAR are two
complementary sensor types. When compared to a
LiDAR sensor, which specializes in 3D localization
and provides rich information of 3D structures, a cam-
era provides color information from which rich se-
mantic features can be extracted. That is the reason
why the data fusion from these two sensors is the most
common in the state of the art and why many attempts
have been made to accurately detect 3D objects us-
ing a combination of camera and LiDAR data. These
approaches are primarily based on LiDAR-based 3D
object detectors and try to incorporate image infor-
mation into various stages of the detection pipeline,
given that LiDAR-based detection methods outper-
form camera-based methods significantly. Combining
the two modalities inevitably results in more compu-
tational overhead and inference time latency due to
the complexity of both detection systems (Mao et al.,
2022).
This technique has been tried extensively (Wu
et al., 2022b; Bai et al., 2022). Some variations in-
clude intermediate stage fusion (Yang et al., 2022b;
Chen et al., 2022d; Li et al., 2022a; Li et al., 2022b),
multi-stage fusion (Yang et al., 2022a; Jiao et al.,
2022), BEV representation fusion (Liu et al., 2022c;
Liang et al., 2022), sequential fusion (Mahmoud
et al., 2022), LiDAR and stereo images fusion (Zhu
et al., 2022) or focal convolution to replace sparse
CNN (Chen et al., 2022c).
3.4 Performance Comparison
Following the guideline of this survey and adhering
to the principle of building on previous works, we
compare the most recent and best performing solution
across the main three different benchmarks: KITTI
(Geiger et al., 2012; Geiger et al., 2013), as shown
in table 2; Waymo (Sun et al., 2020), in table 3, and
finally nuScenes (Caesar et al., 2020), displayed in ta-
ble 4.
3D Object Detection for Autonomous Driving: A Practical Survey
69

In addition, a comparison between the different
methods and frameworks that lie underneath the re-
viewed works is shown in table 5. MMDetection
(OpenMMLab, 2020a) and OpenPCDet (OpenMM-
Lab, 2020b) remain as the most popular baseline for
LiDAR and image 3D object detection projects. Both
property of OpenMMLab, although developed by dif-
ferent teams, they accumulate more than 3k start on
GitHub and almost a thousand forks each. MMDe-
tection3D becomes useful for both LiDAR and image
detection and it even has well documented tutorials on
how to use it for custom datasets. On the other hand,
OpenPCDet focuses on LiDAR-based detection, with
custom cuda code for faster processing.
Apart from those, CenterPoint (Yin et al., 2021) is
another framework of great use, which is based on the
formers and Det3D (Zhu et al., 2019) and lies ground
to TransFusion (Bai et al., 2022). Whereas all of them
are based on PyTorch (Paszke et al., 2019), Lingvo
(Li et al., 2022b) is written natively on TensorFlow
(Abadi et al., 2015).
4 CONCLUSIONS
This papers covers a wide variety of different methods
that try to solve 3D object detection tasks and per-
forms an extensive review of the current technology
vanguard. By starting from basics concepts and go-
ing through the details of the available datasets, eval-
uation metrics and the latest architectures for image,
point cloud and sensor fusion processing, it gives a
clear and broad view of this research field. As it can
be extracted from the results, the fusion and LiDAR-
based techniques offer a more robust solution, clearly
surpassing the performance of their monocular image
counterparts. Nonetheless, the sensor cost is an im-
portant factor that could make the latter a viable alter-
native in certain environments.
ACKNOWLEDGEMENTS
Grant PID2019-104793RB-C31 and PDC2021-
121517-C31 funded by MCIN/AEI/10.13039/50110
0011033 and by the European Union “NextGen-
erationEU/PRTR” and the Comunidad de Madrid
through SEGVAUTO-4.0-CM (P2018/EMT-4362).
REFERENCES
Abadi, M., Agarwal, A., Barham, P., Brevdo, E., Chen, Z.,
Citro, C., Corrado, G. S., Davis, A., Dean, J., Devin,
M., Ghemawat, S., Goodfellow, I., Harp, A., Irving,
G., Isard, M., Jia, Y., Jozefowicz, R., Kaiser, L., Kud-
lur, M., Levenberg, J., Man
´
e, D., Monga, R., Moore,
S., Murray, D., Olah, C., Schuster, M., Shlens, J.,
Steiner, B., Sutskever, I., Talwar, K., Tucker, P., Van-
houcke, V., Vasudevan, V., Vi
´
egas, F., Vinyals, O.,
Warden, P., Wattenberg, M., Wicke, M., Yu, Y., and
Zheng, X. (2015). TensorFlow: Large-scale machine
learning on heterogeneous systems. Software avail-
able from tensorflow.org.
Bai, X., Hu, Z., Zhu, X., Huang, Q., Chen, Y., Fu, H., and
Tai, C.-L. (2022). Transfusion: Robust lidar-camera
fusion for 3d object detection with transformers. In
Proceedings of the IEEE/CVF Conference on Com-
puter Vision and Pattern Recognition, pages 1090–
1099.
Caesar, H., Bankiti, V., Lang, A. H., Vora, S., Liong, V. E.,
Xu, Q., Krishnan, A., Pan, Y., Baldan, G., and Bei-
jbom, O. (2020). nuscenes: A multimodal dataset for
autonomous driving. In Proceedings of the IEEE/CVF
conference on computer vision and pattern recogni-
tion, pages 11621–11631.
Chai, Y., Sun, P., Ngiam, J., Wang, W., Caine, B., Vasude-
van, V., Zhang, X., and Anguelov, D. (2021). To the
point: Efficient 3d object detection in the range image
with graph convolution kernels. In Proceedings of the
IEEE/CVF conference on computer vision and pattern
recognition, pages 16000–16009.
Chang, J.-R. and Chen, Y.-S. (2018). Pyramid stereo match-
ing network. In Proceedings of the IEEE conference
on computer vision and pattern recognition, pages
5410–5418.
Chen, C., Chen, Z., Zhang, J., and Tao, D. (2022a). Sasa:
Semantics-augmented set abstraction for point-based
3d object detection. In AAAI Conference on Artificial
Intelligence, volume 1.
Chen, X., Ma, H., Wan, J., Li, B., and Xia, T. (2017). Multi-
view 3d object detection network for autonomous
driving. In Proceedings of the IEEE conference
on Computer Vision and Pattern Recognition, pages
1907–1915.
Chen, X., Shi, S., Zhu, B., Cheung, K. C., Xu, H., and Li,
H. (2022b). Mppnet: Multi-frame feature intertwin-
ing with proxy points for 3d temporal object detection.
arXiv preprint arXiv:2205.05979.
Chen, Y., Li, Y., Zhang, X., Sun, J., and Jia, J. (2022c).
Focal sparse convolutional networks for 3d object de-
tection. In Proceedings of the IEEE/CVF Conference
on Computer Vision and Pattern Recognition, pages
5428–5437.
Chen, Z., Li, Z., Zhang, S., Fang, L., Jiang, Q., and Zhao,
F. (2022d). Autoalignv2: Deformable feature aggre-
gation for dynamic multi-modal 3d object detection.
arXiv preprint arXiv:2207.10316.
Choi, Y., Kim, N., Hwang, S., Park, K., Yoon, J. S., An,
K., and Kweon, I. S. (2018). Kaist multi-spectral
day/night data set for autonomous and assisted driv-
ing. IEEE Transactions on Intelligent Transportation
Systems, 19(3):934–948.
Creß, C., Zimmer, W., Strand, L., Fortkord, M., Dai, S.,
Lakshminarasimhan, V., and Knoll, A. (2022). A9-
VEHITS 2023 - 9th International Conference on Vehicle Technology and Intelligent Transport Systems
70

dataset: Multi-sensor infrastructure-based dataset for
mobility research. In 2022 IEEE Intelligent Vehicles
Symposium (IV), pages 965–970. IEEE.
Deng, S., Liang, Z., Sun, L., and Jia, K. (2022). Vista:
Boosting 3d object detection via dual cross-view spa-
tial attention. In Proceedings of the IEEE/CVF Con-
ference on Computer Vision and Pattern Recognition,
pages 8448–8457.
Everingham, M., Van Gool, L., Williams, C. K., Winn, J.,
and Zisserman, A. (2010). The pascal visual object
classes (voc) challenge. International journal of com-
puter vision, 88(2):303–338.
Fan, L., Pang, Z., Zhang, T., Wang, Y.-X., Zhao, H., Wang,
F., Wang, N., and Zhang, Z. (2022). Embracing single
stride 3d object detector with sparse transformer. In
Proceedings of the IEEE/CVF Conference on Com-
puter Vision and Pattern Recognition, pages 8458–
8468.
Geiger, A., Lenz, P., Stiller, C., and Urtasun, R. (2013).
Vision meets robotics: The kitti dataset. The Inter-
national Journal of Robotics Research, 32(11):1231–
1237.
Geiger, A., Lenz, P., and Urtasun, R. (2012). Are we ready
for autonomous driving? the kitti vision benchmark
suite. In 2012 IEEE conference on computer vision
and pattern recognition, pages 3354–3361. IEEE.
Geyer, J., Kassahun, Y., Mahmudi, M., Ricou, X., Durgesh,
R., Chung, A. S., Hauswald, L., Pham, V. H.,
M
¨
uhlegg, M., Dorn, S., et al. (2020). A2d2:
Audi autonomous driving dataset. arXiv preprint
arXiv:2004.06320.
Hartley, R. and Zisserman, A. (2003). Multiple view geom-
etry in computer vision. Cambridge university press.
He, C., Li, R., Li, S., and Zhang, L. (2022). Voxel set trans-
former: A set-to-set approach to 3d object detection
from point clouds. In Proceedings of the IEEE/CVF
Conference on Computer Vision and Pattern Recogni-
tion, pages 8417–8427.
Hu, Y., Ding, Z., Ge, R., Shao, W., Huang, L., Li, K., and
Liu, Q. (2022). Afdetv2: Rethinking the necessity
of the second stage for object detection from point
clouds. In Proceedings of the AAAI Conference on
Artificial Intelligence, volume 1, pages 969–979.
Huang, D., Chen, Y., Ding, Y., Liao, J., Liu, J., Wu, K., Nie,
Q., Liu, Y., and Wang, C. (2022). Rethinking dimen-
sionality reduction in grid-based 3d object detection.
arXiv preprint arXiv:2209.09464.
Huang, X., Wang, P., Cheng, X., Zhou, D., Geng, Q., and
Yang, R. (2019). The apolloscape open dataset for
autonomous driving and its application. IEEE trans-
actions on pattern analysis and machine intelligence,
42(10):2702–2719.
Jiao, Y., Jie, Z., Chen, S., Chen, J., Wei, X., Ma, L., and
Jiang, Y.-G. (2022). Msmdfusion: Fusing lidar and
camera at multiple scales with multi-depth seeds for
3d object detection. arXiv preprint arXiv:2209.03102.
Kesten, R., Usman, M., Houston, J., Pandya, T., Nad-
hamuni, K., Ferreira, A., Yuan, M., Low, B., Jain,
A., Ondruska, P., Omari, S., Shah, S., Kulkarni, A.,
Kazakova, A., Tao, C., Platinsky, L., Jiang, W., and
Shet, V. (2019). Level 5 perception dataset 2020.
https://level-5.global/level5/data/.
Ku, J., Mozifian, M., Lee, J., Harakeh, A., and Waslander,
S. L. (2018). Joint 3d proposal generation and object
detection from view aggregation. In 2018 IEEE/RSJ
International Conference on Intelligent Robots and
Systems (IROS), pages 1–8. IEEE.
Kumar, A., Brazil, G., and Liu, X. (2021). Groomed-
nms: Grouped mathematically differentiable nms for
monocular 3d object detection. In Proceedings of the
IEEE/CVF Conference on Computer Vision and Pat-
tern Recognition, pages 8973–8983.
Lang, A. H., Vora, S., Caesar, H., Zhou, L., Yang, J., and
Beijbom, O. (2019). Pointpillars: Fast encoders for
object detection from point clouds. In Proceedings
of the IEEE/CVF conference on computer vision and
pattern recognition, pages 12697–12705.
Li, Y., Chen, Y., Qi, X., Li, Z., Sun, J., and Jia, J.
(2022a). Unifying voxel-based representation with
transformer for 3d object detection. arXiv preprint
arXiv:2206.00630.
Li, Y., Yu, A. W., Meng, T., Caine, B., Ngiam, J., Peng,
D., Shen, J., Lu, Y., Zhou, D., Le, Q. V., et al.
(2022b). Deepfusion: Lidar-camera deep fusion for
multi-modal 3d object detection. In Proceedings of
the IEEE/CVF Conference on Computer Vision and
Pattern Recognition, pages 17182–17191.
Liang, T., Xie, H., Yu, K., Xia, Z., Lin, Z., Wang, Y., Tang,
T., Wang, B., and Tang, Z. (2022). Bevfusion: A sim-
ple and robust lidar-camera fusion framework. arXiv
preprint arXiv:2205.13790.
Liao, Y., Xie, J., and Geiger, A. (2022). Kitti-360: A novel
dataset and benchmarks for urban scene understand-
ing in 2d and 3d. IEEE Transactions on Pattern Anal-
ysis and Machine Intelligence.
Liu, Y., Wang, T., Zhang, X., and Sun, J. (2022a). Petr:
Position embedding transformation for multi-view 3d
object detection. arXiv preprint arXiv:2203.05625.
Liu, Y., Yan, J., Jia, F., Li, S., Gao, Q., Wang, T., Zhang,
X., and Sun, J. (2022b). Petrv2: A unified framework
for 3d perception from multi-camera images. arXiv
preprint arXiv:2206.01256.
Liu, Z., Tang, H., Amini, A., Yang, X., Mao, H., Rus, D.,
and Han, S. (2022c). Bevfusion: Multi-task multi-
sensor fusion with unified bird’s-eye view representa-
tion. arXiv preprint arXiv:2205.13542.
Luo, S., Dai, H., Shao, L., and Ding, Y. (2021). M3dssd:
Monocular 3d single stage object detector. In Pro-
ceedings of the IEEE/CVF Conference on Computer
Vision and Pattern Recognition, pages 6145–6154.
Mahmoud, A., Hu, J. S., and Waslander, S. L. (2022). Dense
voxel fusion for 3d object detection. arXiv preprint
arXiv:2203.00871.
Mao, J., Niu, M., Jiang, C., Liang, H., Chen, J., Liang, X.,
Li, Y., Ye, C., Zhang, W., Li, Z., et al. (2021). One
million scenes for autonomous driving: Once dataset.
arXiv preprint arXiv:2106.11037.
Mao, J., Shi, S., Wang, X., and Li, H. (2022). 3d object
detection for autonomous driving: A review and new
outlooks. arXiv preprint arXiv:2206.09474.
3D Object Detection for Autonomous Driving: A Practical Survey
71

Mao, J., Wang, X., and Li, H. (2019). Interpolated con-
volutional networks for 3d point cloud understanding.
In Proceedings of the IEEE/CVF international confer-
ence on computer vision, pages 1578–1587.
Marin-Plaza, P., Yag
¨
ue, D., Royo, F., de Miguel, M.
´
A.,
Moreno, F. M., Ruiz-de-la Cuadra, A., Viadero-
Monasterio, F., Garcia, J., San Roman, J. L., and
Armingol, J. M. (2021). Project ares: Driverless trans-
portation system. challenges and approaches in an un-
structured road. Electronics, 10(15):1753.
OpenMMLab (2020a). MMDetection3D: OpenMMLab
next-generation platform for general 3D object detec-
tion. https://github.com/open-mmlab/mmdetection3d.
OpenMMLab (2020b). Openpcdet: An open-source tool-
box for 3d object detection from point clouds. https:
//github.com/open-mmlab/OpenPCDet.
Paszke, A., Gross, S., Massa, F., Lerer, A., Bradbury, J.,
Chanan, G., Killeen, T., Lin, Z., Gimelshein, N.,
Antiga, L., et al. (2019). Pytorch: An imperative style,
high-performance deep learning library. Advances in
neural information processing systems, 32.
Patil, A., Malla, S., Gang, H., and Chen, Y.-T. (2019). The
h3d dataset for full-surround 3d multi-object detection
and tracking in crowded urban scenes. In 2019 In-
ternational Conference on Robotics and Automation
(ICRA), pages 9552–9557. IEEE.
Pham, Q.-H., Sevestre, P., Pahwa, R. S., Zhan, H., Pang,
C. H., Chen, Y., Mustafa, A., Chandrasekhar, V., and
Lin, J. (2020). A* 3d dataset: Towards autonomous
driving in challenging environments. In 2020 IEEE
International Conference on Robotics and Automation
(ICRA), pages 2267–2273. IEEE.
Qian, R., Lai, X., and Li, X. (2022). 3d object detection for
autonomous driving: a survey. Pattern Recognition,
page 108796.
Ramajo-Ballester,
´
A., Gonz
´
alez Cepeda, J., and Armin-
gol Moreno, J. M. (2022). Vehicle re-identification
in road environments using deep learning techniques.
In ITS European Congress 2022, pages 363–374.
Reading, C., Harakeh, A., Chae, J., and Waslander, S. L.
(2021). Categorical depth distribution network for
monocular 3d object detection. In Proceedings of the
IEEE/CVF Conference on Computer Vision and Pat-
tern Recognition, pages 8555–8564.
Rukhovich, D., Vorontsova, A., and Konushin, A. (2022).
Imvoxelnet: Image to voxels projection for monocu-
lar and multi-view general-purpose 3d object detec-
tion. In Proceedings of the IEEE/CVF Winter Con-
ference on Applications of Computer Vision, pages
2397–2406.
Sheng, H., Cai, S., Zhao, N., Deng, B., Huang, J., Hua,
X.-S., Zhao, M.-J., and Lee, G. H. (2022). Rethink-
ing iou-based optimization for single-stage 3d object
detection. arXiv preprint arXiv:2207.09332.
Simonelli, A., Bulo, S. R., Porzi, L., L
´
opez-Antequera, M.,
and Kontschieder, P. (2019). Disentangling monocular
3d object detection. In Proceedings of the IEEE/CVF
International Conference on Computer Vision, pages
1991–1999.
Strigel, E., Meissner, D., Seeliger, F., Wilking, B., and Di-
etmayer, K. (2014). The ko-per intersection laser-
scanner and video dataset. In 17th International
IEEE Conference on Intelligent Transportation Sys-
tems (ITSC), pages 1900–1901. IEEE.
Sun, P., Kretzschmar, H., Dotiwalla, X., Chouard, A., Pat-
naik, V., Tsui, P., Guo, J., Zhou, Y., Chai, Y., Caine,
B., et al. (2020). Scalability in perception for au-
tonomous driving: Waymo open dataset. In Proceed-
ings of the IEEE/CVF conference on computer vision
and pattern recognition, pages 2446–2454.
Wang, H., Zhang, X., Li, Z., Li, J., Wang, K., Lei, Z., and
Haibing, R. (2022). Ips300+: a challenging multi-
modal data sets for intersection perception system. In
2022 International Conference on Robotics and Au-
tomation (ICRA), pages 2539–2545. IEEE.
Wang, Z., Ding, S., Li, Y., Fenn, J., Roychowdhury, S.,
Wallin, A., Martin, L., Ryvola, S., Sapiro, G., and
Qiu, Q. (2021). Cirrus: A long-range bi-pattern lidar
dataset. In 2021 IEEE International Conference on
Robotics and Automation (ICRA), pages 5744–5750.
IEEE.
Weng, X. and Kitani, K. (2019). Monocular 3d object detec-
tion with pseudo-lidar point cloud. In Proceedings of
the IEEE/CVF International Conference on Computer
Vision Workshops, pages 0–0.
Weng, X., Man, Y., Cheng, D., Park, J., O’Toole, M., Ki-
tani, K., Wang, J., and Held, D. (2020). All-in-one
drive: A large-scale comprehensive perception dataset
with high-density long-range point clouds. arXiv.
Wilson, B., Qi, W., Agarwal, T., Lambert, J., Singh, J.,
Khandelwal, S., Pan, B., Kumar, R., Hartnett, A.,
Pontes, J. K., et al. (2021). Argoverse 2: Next genera-
tion datasets for self-driving perception and forecast-
ing. In Thirty-fifth Conference on Neural Information
Processing Systems Datasets and Benchmarks Track
(Round 2).
Wu, H., Deng, J., Wen, C., Li, X., Wang, C., and Li, J.
(2022a). Casa: A cascade attention network for 3-d
object detection from lidar point clouds. IEEE Trans-
actions on Geoscience and Remote Sensing, 60:1–11.
Wu, X., Peng, L., Yang, H., Xie, L., Huang, C., Deng, C.,
Liu, H., and Cai, D. (2022b). Sparse fuse dense: To-
wards high quality 3d detection with depth comple-
tion. In Proceedings of the IEEE/CVF Conference
on Computer Vision and Pattern Recognition, pages
5418–5427.
Xiao, P., Shao, Z., Hao, S., Zhang, Z., Chai, X., Jiao, J.,
Li, Z., Wu, J., Sun, K., Jiang, K., et al. (2021). Pan-
daset: Advanced sensor suite dataset for autonomous
driving. In 2021 IEEE International Intelligent Trans-
portation Systems Conference (ITSC), pages 3095–
3101. IEEE.
Xu, Q., Zhong, Y., and Neumann, U. (2022). Behind the
curtain: Learning occluded shapes for 3d object de-
tection. In Proceedings of the AAAI Conference on
Artificial Intelligence, volume 3, pages 2893–2901.
Yang, H., Liu, Z., Wu, X., Wang, W., Qian, W., He, X., and
Cai, D. (2022a). Graph r-cnn: Towards accurate 3d
object detection with semantic-decorated local graph.
arXiv preprint arXiv:2208.03624.
VEHITS 2023 - 9th International Conference on Vehicle Technology and Intelligent Transport Systems
72

Yang, Z., Chen, J., Miao, Z., Li, W., Zhu, X., and
Zhang, L. (2022b). Deepinteraction: 3d object
detection via modality interaction. arXiv preprint
arXiv:2208.11112.
Ye, D., Zhou, Z., Chen, W., Xie, Y., Wang, Y., Wang, P.,
and Foroosh, H. (2022a). Lidarmultinet: Towards a
unified multi-task network for lidar perception. arXiv
preprint arXiv:2209.09385.
Ye, X., Shu, M., Li, H., Shi, Y., Li, Y., Wang, G., Tan, X.,
and Ding, E. (2022b). Rope3d: The roadside percep-
tion dataset for autonomous driving and monocular 3d
object detection task. In Proceedings of the IEEE/CVF
Conference on Computer Vision and Pattern Recogni-
tion, pages 21341–21350.
Yin, T., Zhou, X., and Kr
¨
ahenb
¨
uhl, P. (2021). Center-based
3d object detection and tracking. CVPR.
Yongqiang, D., Dengjiang, W., Gang, C., Bing, M., Xijia,
G., Yajun, W., Jianchao, L., Yanming, F., and Juan-
juan, L. (2021). Baai-vanjee roadside dataset: To-
wards the connected automated vehicle highway tech-
nologies in challenging environments of china. arXiv
preprint arXiv:2105.14370.
Yu, H., Luo, Y., Shu, M., Huo, Y., Yang, Z., Shi, Y., Guo,
Z., Li, H., Hu, X., Yuan, J., et al. (2022). Dair-v2x:
A large-scale dataset for vehicle-infrastructure coop-
erative 3d object detection. In Proceedings of the
IEEE/CVF Conference on Computer Vision and Pat-
tern Recognition, pages 21361–21370.
Zhang, Y., Zhang, Q., Zhu, Z., Hou, J., and Yuan, Y.
(2022). Glenet: Boosting 3d object detectors with
generative label uncertainty estimation. arXiv preprint
arXiv:2207.02466.
Zhou, Y., He, Y., Zhu, H., Wang, C., Li, H., and Jiang, Q.
(2021). Monocular 3d object detection: An extrin-
sic parameter free approach. In Proceedings of the
IEEE/CVF Conference on Computer Vision and Pat-
tern Recognition, pages 7556–7566.
Zhou, Z., Zhao, X., Wang, Y., Wang, P., and Foroosh, H.
(2022). Centerformer: Center-based transformer for
3d object detection. In European Conference on Com-
puter Vision, pages 496–513. Springer.
Zhu, B., Jiang, Z., Zhou, X., Li, Z., and Yu, G. (2019).
Class-balanced grouping and sampling for point cloud
3d object detection. arXiv preprint arXiv:1908.09492.
Zhu, H., Deng, J., Zhang, Y., Ji, J., Mao, Q., Li, H., and
Zhang, Y. (2022). Vpfnet: Improving 3d object de-
tection with virtual point based lidar and stereo data
fusion. IEEE Transactions on Multimedia.
3D Object Detection for Autonomous Driving: A Practical Survey
73
