
SkyData: Rise of the Data How Can the Intelligent and Autonomous
Data Paradigm Become Real?
Etienne Mauffret
a
, Elise Jeanneau
b
and Eddy Caron
c
UMR CNRS, ENS Lyon, UCB Lyon 1, Inria 5668, Lyon, France
fi
Keywords:
Distributed Systems, Autonomous Data, Data Management, Multi-Agents System.
Abstract:
With the rise of Data as a Service, companies understood that whoever controls the data has the power. The
past few years have exposed some of the weakenesses of traditional data management systems. For example,
application owner can collect and use data to their own advantage without the user’s consent. We introduce
in this paper the SkyData concept, which revolves around autonomous data evolving in a distributed system.
This new paradigm is a complete break from traditional data management systems. In this paper we will show
a way to define autonomous data as well as some challenges associated with their specificities.
1 INTRODUCTION
A fundamental characteristic of our era is the deluge
of Data. Data is everywhere, e.g., scientific, entertain-
ment and IoT applications, personal activity track-
ers, etc. Since Grid environments, data management
in distributed environments is quite a common prac-
tice (Filangi et al., 2008). Nowadays, Clouds pro-
vide many solutions to store data (Strauch et al.,
2011). A data manager can be defined through its
functionalities which can be understood as services.
Indeed, many services are required for data man-
agement, such as security (Kaufman, 2009), replica-
tion strategy (Lei et al., 2008), data migration (Kang
and Reddy, 2008), green data transfer (Orgerie and
Lefèvre, 2013), synchronization (Filangi et al., 2008).
Many ways to design those services exist, and each
data manager includes its own point of view to com-
pose these services (Strauch et al., 2011). Thus, when
users need a specific data management strategy, they
can choose an appropriate data manager but with high
dependency to this manager.
Data management since its genesis uses a central-
a
https://orcid.org/0000-0001-8444-6293
b
https://orcid.org/0000-0003-1924-2280
c
https://orcid.org/0000-0001-6626-3071
This research was funded, in whole or in part, by
l’Agence Nationale de la Recherche (ANR), project ANR-
22-CE25-0008-01. For the purpose of open access, the au-
thor has applied a CC-BY public copyright licence to any
Author Accepted Manuscript (AAM) version arising from
this submission.
ized data manager as a standard (Han et al., 2011).
With huge and distributed system, new solutions were
designed for Grid (Sakr et al., 2011) or P2P sys-
tem (Antoniu et al., 2006) for example. More recently,
researchers have proposed solutions to deal with dy-
namic use, for example, tools that provision data man-
agement system on top of storage devices (Tessier
et al., 2020). Usually, the point of view of data man-
agement is centered on applications rather than data,
even when an automatic solution is provided. For ex-
ample, the authors of (Kumar et al., 2014) deal with
data placement for intensive web applications.
Nonetheless, many approaches are relevant and
efficient but domain specific and provide full control
of actual data to the data management system built
by the application. Despite unquestionable benefits to
users, Cloud computing raises several concerns about
data management. Companies have understood that
whoever controls the data has the power and control
over the business. For example, the company that built
the data management system of an application can use
it to sell data or to collect personal data or use any (or
every) data to their own advantage, without needing
any permissions or consent from users.
SKYDATA aims to prevent those abuses and pro-
poses a new take on data management: the self-
managed data. Each replica of each piece of data is
carried by an autonomous agent that acts on its own
on the behalf of the application. The association of the
agent and the replica is called SkyData, or SKD. As
autonomous entities, SKD are capable to make de-
cision to manage their own data, thus SKD are self-
164
Mauffret, E., Jeanneau, E. and Caron, E.
SkyData: Rise of the Data How Can the Intelligent and Autonomous Data Paradigm Become Real?.
DOI: 10.5220/0011749900003488
In Proceedings of the 13th International Conference on Cloud Computing and Services Science (CLOSER 2023), pages 164-171
ISBN: 978-989-758-650-7; ISSN: 2184-5042
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)

managed data. With this paradigm shift, each self-
managed data is controlled by none but itself in a
distributed manner, independently of any data man-
agement service. One of the important aspect of such
system is the non existence of a global index table
that could indicate the name (and position) or every
data in the system. Rather, a SkyData environment
can only have some partial index table that hold a lim-
ited amount of reference of SKD. Any reference to a
SKD is based on a registration initiated by the SKD
and can be cancelled at any time.
Hence, this paradigm does not aim to replace ex-
isting data management systems, it should be viewed
as an alternative and a complete rupture from them
and should establish new connections between data
management, distributed systems and multi-agent
systems. This paper present the core concepts and
structures of self-managed data and their environ-
ment. However, we ask the readers to keep in mind
that this is a new concept where data can be assim-
ilated to a living entity without control. Therefore,
we present here a generic definition of the model
needed, which may need to be adapted for specific
use cases. Self-managed data are able to decide, from
their own knowledge about the system, which action
to undertake: they could decide to replicate, move to
another physical node, leave the system, etc. Like mo-
bile agents, self-managed data can move from one
host to another and continue its execution on the new
host. In the context of network management, it has
been shown that mobile agents provide more robust
and fault-tolerant solutions while allowing reduction
of the network load (Lange, 1998). In the context of
data management, the number and position of each
replica of data has proven to be a key factor for good
performances (Kaur et al., 2019) while being a hard
problem (Golubchik et al., 2009) Self-managed data
must then be able to consider both fields in order to
provide good services.
In this paper, we present SKYDATA, the first pro-
posal to design an environment for self-managed data.
We present the state of the art and the context in which
this paradigm came to existence (Section 2), then we
define the SKYDATA Environment structure and envi-
ronment in (Section 3). We then discuss of capabili-
ties and goals of SKD (Section 4). We then conclude
and discuss the SKYDATA paradigm (Section 5).
2 RELATED WORK
We can define four major eras for the data man-
agement in IT (Information Technology). The early
era was the digitalization of information (Sendov,
1997). The second era was the building of Database
Management Systems (DBMS). While many of them
were based on SQL, nowadays, DBMS continue to
grow with the amount of data, and solutions based
on NoSQL approaches have appeared (Leavitt, 2010;
Moniruzzaman and Hossain, 2013).
Next, the emergence of distributed management
systems (Moysiadis et al., 2018) has arisen and
evolved through Grid, P2P and Cloud architectures:
the third era around distributed data management was
born. Technical comparison of NoSQL data manage-
ment systems can be found in (Bunch et al., 2010;
Han et al., 2011). Those studies compare the differ-
ent approach chosen for data management systems,
as well as a study on their performances.
The fourth era is the data storage era. The ascent
of DaaS (Data as a Service) systems (Kravchenko
et al., 2019) is undeniable, and its success can
be observed through many solutions like Dropbox,
Google Drive, S3 from Amazon, iCloud from Ap-
ple, OneDrive from Microsoft, Owncloud, etc. Data
is now everywhere and is therefore at the heart of our
IT life. Emerging from the foundations of these four
era is the advent of a today well-known era that we
could call the data control era.
Through SKYDATA, we have the ambition to con-
tribute to the genesis of a fifth and new era of data
management: the self-managed data era. All knowl-
edge around data management such as data model-
ing, storage, migration, and encryption will be use-
ful. Data control will be delegated to data themselves.
Thus, we plan to design a solution without middle-
ware nor data manager. For those reasons, existing
data management systems seem really far from what
we propose in this project and comparison hardly rel-
evant. Nevertheless, not so far from our main ideas,
many researchers have introduced data-centric so-
lutions (Polese et al., 2020; Provost and Fawcett,
2013) and we have initiated new research on data-
driven service discovery in (Houmani et al., 2020).
Other researchers have focused on using autonomous
data (Caragea et al., 2003), but those solutions have
kept a certain degree of control over the data.
The SKYDATA stated goal of providing data
storage independently of any data management ser-
vice warrants comparison with blockchain technol-
ogy, which is used to maintain a distributed ledger
independently of any centralized authority. While
blockchain is indeed capable of maintaining the con-
sistency of a small amount of data in a truly decen-
tralized manner, the amount of data that can be stored
in a block is very limited. This is notably the reason
Non-Fungible Tokens (NFTs) are used to store URIs
to a resource, rather than storing the resource itself.
SkyData: Rise of the Data How Can the Intelligent and Autonomous Data Paradigm Become Real?
165

Additionally, blockchain scalability is still an open
problem (Zhou et al., 2020), which prevents it from
acting as large scale distributed data storage. While
blockchain technology is not itself a viable alternative
to SKYDATA Environment, it might be a useful tool
to implement some functionalities of the SKYDATA
Environment Project, notably for the certification and
traceability of self-managed data.
The foundations of self-managed data are inspired
from several existing paradigms, including multi-
agent systems (Russell, 2010), P-systems (Paun,
1999) and population protocols (Angluin et al., 2004).
However, the spirit of SKYDATA is quite different
from that of multi-agent systems. In multi-agent sys-
tems, autonomous entities take individual decisions in
order to achieve a common objective or self-interested
objectives. Deliberative agent are able to make com-
plex decisions by reasoning on an explicit representa-
tion of their environment. In large scale and dynamic
environments where the agents usually have partial
observability of the system, building this model of
the environment and making coordinated decisions is
very difficult (Beynier and Mouaddib, 2014). In the
autonomous data paradigm, a SKD aims at using the
collective intelligence to achieve its own selfish goals,
for example its survival in the system. The other dif-
ference lies in the fact that both data and code are em-
bedded. The latter opens new ways of computing and
composing services, which are rather close to the P-
system paradigm. Finally, the distributed autonomous
load-balancing between SkyData and their replicates
will be based on probe mechanisms that are close to
the counting problem in population protocols.
3 THE SkyData ENVIRONMENT
SKYDATA Environments are the first model of the
new paradigm of self-managed data. Hence it comes
with many news concepts and definitions. In this sec-
tion, we first present the specific definitions related
to SKYDATA Environments before using those def-
inition to introduce the core concepts of SKYDATA
Environments.
3.1 Short Definitions
• SKD: SkyData, noted SKD, are autonomous
agents that carry the data itself and metadata.
Among the metadata, some code allows the SKD
to plan for its actions. SKDs are endowed with
goals and capabilities making it autonomous,
proactive and reactive within the system.
• Family (of SKDs): As in many distributed system,
Figure 1: Example of content of a SKD.
stored data is replicated. When a SKD is repli-
cated, a new SKD containing a replica is created.
The set of SKDs that hold the same piece of data
is called a family.
• SKW: SkyWorkers, noted SKW, are another en-
tity of a SKYDATA Environment. They can be
viewed as special SKDs that are entrusted with a
system task rather than application data. They are
capable of moving within the system and commu-
nicating with SKDs to accomplish their task.
• Harbour: Harbours are the physical host that hold
SKDs and SKWs. They act as an interface for
users. In order to keep SKDs as autonomous as
possible, harbour s have a very limited amount of
capabilities.
• Moored (SKD): A SKD that is hosted by a har-
bour is said to be moored to that harbour . SKDs
hosted by the same harbour are said to be moored
together.
• SKYDATA Environment: A SKYDATA Environ-
ment is a collection of SKDs, SKWs and harbour
s. SKDs and SKWs can interact by sending each
other messages, and can migrate from a harbour
to another.
In addition to those definitions, we define some
core mechanism of SKYDATA Environments.
• Triggers: SKDs have a collection of triggers that
are used to check associated boolean conditions.
If the condition is verified, the SKD then reaches
the corresponding micro-service node and exe-
cutes a remote procedure call. This mechanism is
used to implement the capabilities of SKD.
• Internal Controller: Each SKD has an internal
controller that represents its intelligence. Among
others tasks, The controller uses goals to deter-
mines which triggers to check.
3.2 The SKD Concept
SKDs are agents that carry a piece of data and are
CLOSER 2023 - 13th International Conference on Cloud Computing and Services Science
166

thus the core entities of the paradigm. They are au-
tonomous, proactive, reactive and have some so-
cial ability, as defined in (Wooldridge and Jennings,
1995). Each SKD is endowed with goals and capa-
bilities that will influence its planning and the action
that it will undertake. Its behavior is influenced by the
(partial) knowledge of the environment and a change
of this environment can trigger a response from the
SKD. The goals of a SKD are set at its creation and
usually aim to provide a good quality of service. How-
ever, SKDs are capable of learning and their goals
can evolve during the run to meet new applicative
needs. As a result, SKDs can be seen as application-
independent, since they might participate in different
applications over time. Intuitively, a SKD should not
be seen as a worker made to accomplish a task, but
rather as a “person” that might work different jobs
during their lifetime.
We can also use the Beliefs-Desires-Intentions
model, presented in (Bratman et al., 1988) to de-
scribed the self-managed data. Each SKD has its own
beliefs, its own partial view of the environment and
will choose amongst its desires, or goals, to undertake
actions among the set of its capabilities.
An SKD is identified by its family ID (which is
common to the family, but otherwise unique within
the system), and its SKD ID (which is unique within
the family).
An SKD can register itself to some services as
well, such as a logical group to accomplish some
common objectives or a partial index table for exam-
ple. Such table allows a user to keep track of data it
owned. SKD remains in control of their registration
and can leave any group or service at any time.
Family Content: SKDs that belong to the same
family share a part of their metadata. This section of
the metadata is referred to as the family content. It
contains, among other information, all the informa-
tion needed by users : the data itself, knowledge about
the data (such as the name of the file, its size, etc.),
and the family ID. The family content also includes
internal information (inaccessible by users) such as a
list of members of the family and some knowledge
about the data or the system. Some goals, such as the
consistency guarantees, must be shared by the family
in order to satisfy the applications guarantees. Finally,
some triggers and the associated micro-services are
grouped actions, such as a consensus protocol. Those
triggers and associated services must then be compat-
ible within a family. The family content is shared in
a distributed way and will converge through time to
provide properties of the family.
Personal Content: Additionally to the family
content, SKD has a personal content. Unlike the fam-
ily content, the personal content is not shared and can
be different from a SKD to another, even within the
same family. This is where the individuality of the
SKD is expressed. The personal content is composed
of the internal controller and some personals goals,
triggers and knowledge. For example, the migration
trigger (or associated micro services) does not need to
be shared with the family and is included in the per-
sonal content: this means that each SKD in the family
may have a different placement strategy.
An example of SKD is illustrated in the Figure
1. In this example, the data itself is a satellite pic-
ture of a mountain of size 154kb created by jjbinks
on the 09/08/2016. Its family ID and SKD ID are
#S8421 and #S8421 −1 respectively. It is currently in
the harbour #H0015 and knows some other harbour s
as well as 2 other member of its family (#S8421 − 3
and #S8421 − 2). The example also shows some fam-
ily goals and family triggers as well as personal ones.
3.3 The SKW Concept
SKWs are entities created to accomplish one pre-
cise task for the system, such as gathering some in-
formation or aggregate learning models. SKWs can
be viewed as a dataless variation of SKDs: they do
not hold any data but otherwise use the same mecha-
nisms. However, their life cycle is not quite the same,
as SKW are created to accomplish one precise task
and disappear once it is done. SKWs largely share
the same structure as SKDs: their family content is
composed by knowledge, triggers and goals as well as
the task to be accomplished. They also have personal
content with an internal controller. Hence, despite the
task to accomplish, SKWs are autonomous and will
choose freely how to best accomplish their task.
Some operations require more knowledge or ca-
pabilities that an SKD has on hand. In this case, the
SKD can invoke a family of SKWs to accomplish a
task to help it perform this operation. For example,
some learning services require to gather models from
as many SKDs as possible to aggregate them and pro-
vide a trained model. To be able to gather those mod-
els without disturbing its other goals, a SKD can cre-
ate a family of SKW that will explore the system to
collect local models and provide a trained model.
It should be noted that in most situation, SKWs
do not have authority over the SKDs: they can talk to
SKDs and carry information between them, but the
SKDs are not forced to cooperate with the SKWs.
This enables us to preserve the autonomy of the SKDs
while still making use of task-centric agents. How-
ever, in rare cases and with the permission of a sys-
tem administrator, it is possible to create some SKWs
SkyData: Rise of the Data How Can the Intelligent and Autonomous Data Paradigm Become Real?
167
with the capability to modify or destroy SKDs. This
kind of SKW can be seen as “super users” if the sys-
tem needs some administrative control, for example
to delete some illegal data.
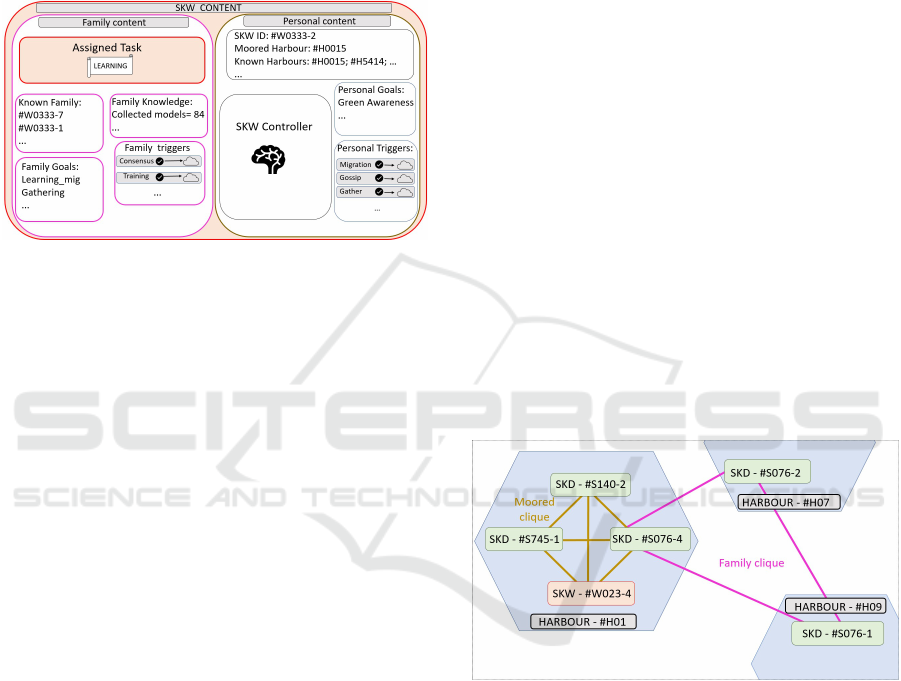
An example of SKW is illustrated in Figure 2. The
SKD, identified by #W 0333 − 2 has some knowledge
shared among the family as well as personal content
and an internal controller.
Figure 2: Example of content of a SKW.
4 CAPABILITIES
We describe in this section some fundamental oper-
ations and capabilities that any SKD should be able
to perform. This section is not exhaustive and aims to
help grasp the concept and possibilities brought by a
SKYDATA Environment. Because SKWs have similar
capabilities, everything that is discussed in this sec-
tion about SKDs also applies to SKWs.
4.1 Communications
A SKYDATA Environment is an unknown dynamic
distributed system: SKD can join or leave the system
at any time for numerous reasons. Upon joining the
system, a SKD does not have any knowledge about
the system and must use sensors and communication
to gather knowledge. We consider that every SKD
have a protocol to reach for the local harbour and
moored s SKD. As harbour s can provide the list of
local SKD, it is possible for two SKDs to commu-
nicate with each other as long as they remain in the
same harbour . Therefore, each harbour constitutes a
clique of SKDs that can all communicate with each
other. We refer to such a group as a moored clique.
This clique has dynamic membership, since any of its
members may at any time start a migration or create a
replica of itself.
Moreover, SKDs keep tracks of their family mem-
bers. Indeed, as members of a family share their fam-
ily content (the data itself, some goals, etc.), they will
be required to communicate with each other in order
for most applications to behave normally, for exam-
ple to establish a consensus to maintain strong consis-
tency among the replica. As a result each family also
constitutes a clique, referred to as the family clique,
as every member of a family can contact every other
member of the family. Due to replication and failures,
this clique also has dynamic membership. We con-
sider that a family must maintain the family clique as
much as possible and describe in the respectives sec-
tions the step needed to do so. A SKYDATA Environ-
ment can be highly dynamic and can include many
SKDs at any given point in time. As SKDs can mi-
grate from a harbour to another, it should carry as
little information as possible. Therefore, it is both dif-
ficult and undesired for a SKD to store information
about every other SKD in the system. A SKD can only
communicate (i.e., send a message) with another SKD
if it knows its location, and thus with the two cliques
previously described. Those two cliques can be used
to implement distributed algorithms, although most
algorithms would need to be adapted to the specificity
of the system and will be the subject of future works.
Figure 3 provides a visual representation of a moored
clique and a family clique, with 6 SKDs within 3 har-
bour s. The family #S076 counts 3 replica, while oth-
ers are unique in the system. This example highlights
the two cliques that SKD #S076 − 4 belongs to.
Figure 3: Example of a SKYDATA Environment with a SKD
point of view.
It is important to note and understand that those
limited communications do not allow for a SKD or a
harbour to reach a given SKD deterministically. In-
deed, due to the high dynamics of the system, the au-
tonomy of the SKD and limited communications, it is
not possible to guarantee that a path exists between
two SKDs.
This particularity causes a fundamental difference
with traditional data management systems. Indeed, it
is impossible to ensure that a user will be able to
obtain some specific data. Therefore, we insist that
SKYDATA Environments does not aim to replace tra-
ditional data management systems, but aim to offer an
CLOSER 2023 - 13th International Conference on Cloud Computing and Services Science
168

alternative when it is suited to the application.
4.2 Replication and Deletion
As part of a data management system, a SKD aims
to maintain the replication factor of the data it holds.
In others words, the SKD tries to maintain the family
size to some value. The good news is that the repli-
cation factor should be a family goal and thus ev-
ery member of the family aims for the same family
size. However, it could occur that some SKD is wrong
about the size of its family, for example in case of a
family partition. In this situation, the SKD that holds
this incorrect belief might either replicate or delete it-
self to help the family to reach the desired goal. In
order to prevent too many replications or deletions,
we add some controls to those protocols. We use the
Belief-Desire-Intent model to describes the plan to
maintain the replication factor (i.e., the family size).
We assume that every SKD has some beliefs about
the replication factor and the current family size,
noted RF and N respectively, and can communicate
with known members of its family. Upon update of
one of those values, if the SKD believes that RF ̸= N,
it will intent to execute the replication or deletion
protocols, described in Algorithm 2 according to the
plan described in Algorithm 1. The plan states that if
there are too few member in the family (i.e., N < RF)
then the SKD must run the replicationProtocol, on
the other hand, if there are too many family member,
the deleteProtocol is initiated. The replication proto-
col determines if the SKD will replicate with a given
probability p
1
1
and will send a message with the ID
of the new replica once created.
In order to delete itself, a SKD asks for permission
to every known member of its family and waits for N
confirmations. Upon reception of a deletion permis-
sion request, SKD can send one answer among: ack,
denial and undecided. An ack is sent if the SKD that
responds to the request does not also want to delete
itself, and if it believes there are enough family mem-
bers. The SKD sends undecided if it wants to delete
itself. Finally, a denial is sent if there are not enough
family members or with some probability p
2
1
instead
of an undecided. Upon reception of a denial, the SKD
forfeits its wish to delete itself and thus can send
a confirmation to other SKDs, which helps prevent
deadlocks. Once a SKD receives a sufficient number
of acks, it simply deletes itself. All of the previous
steps are then repeated until every SKD that wanted
1
We recommend p
1
=
RF−N
N
and p
2
=
1 − exp(
ln(1−
RF
E
)
N
) for the appropriate expected num-
ber of replications and deletions.
to delete itself has either succeeded or given up. This
protocol ensures that at least RF SKDs will not delete
themselves, while avoiding deadlocks in most cases.
Moreover, this protocol does not require every mem-
ber of the family to have the same belief about the size
of the family.
The function replicate() creates an exact copy of
the SKD as a new SKD and returns the SKDID of the
new copy. The delete() call simply erases the SKD
from the system. Algorithms 1 and 2 assume that the
family uses safe migrations to prevent family parti-
tions.
Algorithm 1: Maintain Replication Factor Plan.
Beliefs: replicationFactor(RF)
familySize(N)
+!maintainRF : N < RF
1 ← .replicationProtocol(RF, N)
+!maintainRF : RF < N
2 ← .deleteProtocol(RF, N)
Algorithm 2: REPLICATION Protocol.
Code for a SKD with SKDID = i.
void replicationProtocol(RF, N)
1 do with proba p
1
:
2 IDReplica ← replicate()
3 Broadcast(new, IDReplica) to f amily
void deleteProtocol(RF, N)
4 deleteMysel f ← True
5 while(True):
6 Broadcast(delete, i) to f amily
7 wait for N message:
8 if (at least RF ack): delete()
9 if (at least 1 denial):
10 deleteMysel f = False
11 break
on reception of (delete, j)
12 if (!deleteMysel f ) : send(ack) to j
13 elif (RF < N) : send(denial) to j
14 elif with proba p
2
: send(denial) to j
15 else: send(undecided) to j
4.3 Gathering and Broadcasting
Information
An important capability required for numerous algo-
rithms, notably the learning process, is the capability
to gather and broadcast information around the sys-
tem. Indeed, a SKD can only have a partial view of the
system at any time. And having a better representation
SkyData: Rise of the Data How Can the Intelligent and Autonomous Data Paradigm Become Real?
169

of the system may allow for better decisions. We pro-
pose two different approaches to perform a gathering
process, each with pros and cons.
The first approach is the gossip based algorithm.
In this protocol, each SKD periodically sends its
knowledge among the two cliques it belongs to
(moored clique and family clique). Symmetrically,
it will receive an update from every member of its
family and every SKD in its harbour . These steps are
then repeated over and over, thus spreading informa-
tion through gossip. The advantage of this approach is
that each SKD will quickly have most of the needed
knowledge to be able to take good decisions. How-
ever, the number of messages scales badly with the
number of SKDs and harbour s and much informa-
tion is shared redundantly. It is possible to perform
the same algorithm but for only a handful of SKD at
the cost of a loss of knowledge for every other SKD.
The second approach relies on SKWs. A SKW
(or a family of SKWs) specialized in gathering and
sharing knowledge can migrate from harbour to har-
bour with the task of communicating with as many
SKDs as possible. When the SKW arrives in a har-
bour , it shares its knowledge of the system and re-
quests knowledge from local SKDs. This protocol al-
low gathering and propagate knowledge while keep-
ing a low communication cost. However, a given SKD
will only receive information upon meeting the SKW.
This process can take a long time and could lead to
the incapacity for a SKD to receive information, in
the event it does not meet any SKW. This issue can
be mitigated by combining this technique with the
first algorithm, for example by spreading some lim-
ited gossip when the SKW arrives in a new harbour .
Those two approaches are early attempts to es-
tablish gathering and broadcasting capabilities in a
SKYDATA Environment. Future works will address
this challenge and propose a more efficient way
to gather and broadcast knowledge through gossip
and/or SKWs.
5 DISCUSSION & CONCLUSION
In this paper, we presented SKYDATA, a first attempt
at self-managed data, a new paradigm that distances
itself from traditional data management systems. This
paradigm is born from the many issues associated
with traditional data management systems, such as re-
sells or private information collected without consent,
for example. Self managed data, or SKDs, are agents
endowed with data, capabilities and goals to achieve.
They are free to behave as they wish and try to accom-
plish their goals as efficiently as possible. They use
learning algorithms to improve their decision making
and learn new capabilities and services. We discussed
how SKDs could be developed and provided some in-
sight on useful capabilities.
SKDs are independent and autonomous entities,
and therefore cannot be used as a traditional data man-
agement system. Additionally, the size and dynam-
ics of a SKYDATA Environment makes it difficult for
SKDs to keep a complete view of the system. As a
result, it is impossible to centralize up to date and
complete knowledge of the system. In particular, it
is impossible for a SKD to reach another remote SKD
if they are not from the same family. This very fact
creates a break from existing data management sys-
tems, making the classic “join request” impossible to
achieve deterministically. Moreover, the capacity of
SKDs to replicate, leave the system or migrate make
them different than traditional multi agents systems.
A first version of a SKYDATA Environment is
being developed using JADE and JASON to im-
plement SKDs using the Beliefs-Desires-Intentions
model with AgentSpeak (Bordini et al., 2007). This
prototype will be presented in futures works.
Many challenges rise from the lack of determin-
istic point-to-point communications, except for lim-
ited groups such as the family clique and the moored
clique, and the lack of a complete view of the sys-
tem. For example, we do not yet know how to im-
plement a deterministic broadcast or gathering. Many
distributed algorithms and services must be adapted
for this new paradigm. This difficulty also makes
many existing applications unadapted to a SKYDATA
Environment. We recall that autonomous data do not
aim at replacing traditional data management systems
in every situation, but seems to be a desirable alterna-
tive whenever it is possible.
REFERENCES
Angluin, D., Aspnes, J., Diamadi, Z., Fischer, M. J., and
Peralta, R. (2004). Computation in networks of pas-
sively mobile finite-state sensors. In Proceedings of
the twenty-third annual ACM symposium on Princi-
ples of distributed computing.
Antoniu, G., Bertier, M., Bougé, L., Caron, E., Desprez, F.,
Jan, M., Monnet, S., and Sens, P. (2006). GDS: An
architecture proposal for a grid data-sharing service.
In Future Generation Grids. Springer.
Beynier, A. and Mouaddib, A.-I. (2014). Applications of
dec-mdps in multi-robot systems. In Robotics: Con-
cepts, Methodologies, Tools, and Applications.
Bordini, R. H., Hübner, J. F., and Wooldridge, M. (2007).
Programming multi-agent systems in AgentSpeak us-
ing Jason. John Wiley & Sons.
CLOSER 2023 - 13th International Conference on Cloud Computing and Services Science
170

Bratman, M. E., Israel, D. J., and Pollack, M. E.
(1988). Plans and resource-bounded practical reason-
ing. Computational intelligence.
Bunch, C., Chohan, N., Krintz, C., Chohan, J., Kupferman,
J., Lakhina, P., Li, Y., and Nomura, Y. (2010). An
evaluation of distributed datastores using the appscale
cloud platform. In 2010 IEEE 3rd International Con-
ference on Cloud Computing. IEEE.
Caragea, D., Silvescu, A., and Honavar, V. (2003). De-
cision tree induction from distributed heterogeneous
autonomous data sources. In Intelligent systems de-
sign and applications. Springer.
Filangi, O., Beausse, Y., Assi, A., Legrand, L., Larré, J.-M.,
Martin, V., Collin, O., Caron, C., Leroy, H., and Al-
louche, D. (2008). Biomaj: a flexible framework for
databanks synchronization and processing. Bioinfor-
matics.
Golubchik, L., Khanna, S., Khuller, S., Thurimella, R., and
Zhu, A. (2009). Approximation algorithms for data
placement on parallel disks. ACM Transactions on
Algorithms (TALG).
Han, J., Haihong, E., Le, G., and Du, J. (2011). Survey on
nosql database. 2011 6th international conference on
pervasive computing and applications.
Houmani, Z., Balouek-Thomert, D., Caron, E., and
Parashar, M. (2020). Enhancing microservices archi-
tectures using data-driven service discovery and qos
guarantees. In 2020 20th IEEE/ACM CCGRID. IEEE.
Kang, S. and Reddy, A. N. (2008). User-centric data migra-
tion in networked storage systems. 2008 IEEE ISPDP.
Kaufman, L. M. (2009). Data security in the world of cloud
computing. IEEE Security & Privacy.
Kaur, A., Gupta, P., Singh, M., and Nayyar, A. (2019). Data
placement in era of cloud computing: a survey, taxon-
omy and open research issues. Scalable Computing:
Practice and Experience.
Kravchenko, Y., Leshchenko, O., Dakhno, N., Trush, O.,
and Makhovych, O. (2019). Evaluating the effective-
ness of cloud services. In 2019 IEEE ATIT. IEEE.
Kumar, K. A., Quamar, A., Deshpande, A., and Khuller, S.
(2014). Sword: workload-aware data placement and
replica selection for cloud data management systems.
The VLDB Journal.
Lange, D. B. (1998). Mobile objects and mobile agents: The
future of distributed computing? In European confer-
ence on object-oriented programming. Springer.
Leavitt, N. (2010). Will nosql databases live up to their
promise? Computer.
Lei, M., Vrbsky, S. V., and Hong, X. (2008). An on-
line replication strategy to increase availability in data
grids. Future Generation Computer Systems.
Moniruzzaman, A. and Hossain, S. A. (2013). Nosql
database: New era of databases for big data analytics-
classification, characteristics and comparison. arXiv
preprint arXiv:1307.0191.
Moysiadis, V., Sarigiannidis, P., and Moscholios, I. (2018).
Towards distributed data management in fog comput-
ing. Wireless Communications Mobile Computing.
Orgerie, A.-C. and Lefèvre, L. (2013). Energy-efficient data
transfers in large-scale distributed systems. In Hand-
book of Energy-Aware and Green Computing, Volume
2. Chapman and Hall/CRC.
Paun, G. (1999). P systems with active membranes: Attack-
ing np complete problems. Technical report, Depart-
ment of Computer Science, The University of Auck-
land, New Zealand.
Polese, M., Jana, R., Kounev, V., Zhang, K., Deb, S., and
Zorzi, M. (2020). Machine learning at the edge: A
data-driven architecture with applications to 5g cellu-
lar networks. IEEE TMC.
Provost, F. and Fawcett, T. (2013). Data science and its rela-
tionship to big data and data-driven decision making.
Big data.
Russell, S. J. (2010). Artificial intelligence a modern ap-
proach. Pearson Education, Inc.
Sakr, S., Liu, A., Batista, D. M., and Alomari, M. (2011).
A survey of large scale data management approaches
in cloud environments. IEEE communications surveys
& tutorials.
Sendov, B. (1997). Towards global wisdom in the era of
digitalization and communication. Prospects.
Strauch, S., Kopp, O., Leymann, F., and Unger, T. (2011).
A taxonomy for cloud data hosting solutions. 2011
IEEE Ninth International Conference on Dependable,
Autonomic and Secure Computing.
Tessier, F., Martinasso, M., Chesi, M., Klein, M., and
Gila, M. (2020). Dynamic provisioning of storage re-
sources: a case study with burst buffers. In 2020 IEEE
IPDPSW. IEEE.
Wooldridge, M. and Jennings, N. R. (1995). Intelligent
agents: Theory and practice. The knowledge engineer-
ing review.
Zhou, Q., Huang, H., Zheng, Z., and Bian, J. (2020). So-
lutions to scalability of blockchain: A survey. IEEE
Access.
SkyData: Rise of the Data How Can the Intelligent and Autonomous Data Paradigm Become Real?
171
