
Swapping Physical Resources at Runtime
in Embedded MultiAgent Systems
Nilson Mori Lazarin
1,2 a
, Carlos Eduardo Pantoja
1,2 b
and Jos
´
e Viterbo
1 c
1
Institute of Computing (IC), Fluminense Federal University (UFF), Niter
´
oi-RJ, Brazil
2
Federal Center for Technological Education Celso Suckow da Fonseca (Cefet/RJ), Rio de Janeiro, Brazil
Keywords:
Multi-Agent Systems, Embedded Multi-Agent Systems, Embedded Systems.
Abstract:
An Embedded MultiAgent System (MAS) is a cognitive system embedded into a physical device responsible
for controlling the existing resources and communicability with other devices. An Embedded MAS provides
autonomy and proactivity to physical devices using the BDI model. Designing a device implies choosing
sensors and actuators as resources and programming firmware and reasoning at design time. However, at
runtime, resources could sometimes be damaged, presenting malfunctioning, or need to be changed. Then,
performing predictive, preventive, or corrective maintenance at runtime is impossible since the designer must
stop the Embedded MAS to swap resources and reprogram the system. This paper presents a novel ability
for swapping resources at runtime in Embedded MAS using an extended version of Argo agents and the
Jason framework. A case study analyses the new swap ability in different situations: removing and changing
existing resources, adding new known and unknown resources, and causing a failure in a resource. The study
case shows how the new swap ability can make devices with Embedded MAS adaptable and fault-tolerant.
1 INTRODUCTION
A MultiAgent System (MAS) is composed of soft-
ware agents that can perceive or act in a real or a
virtual environment where they are situated. These
agents are cognitive, autonomous, proactive, and have
the social ability since they can interact with other
agents from the MAS to compete or collaborate to-
ward their individual or system goals (Wooldridge,
2009). Agents can assume cognitive abilities by
adopting a cognitive model. One of the most adopted
cognitive models is the Belief-Desire-Intention model
(BDI) (Bratman, 1987). This model is based on un-
derstanding the practical human reasoning that de-
cides, moment by moment, what action to take to
achieve goals based on plans that beliefs, desires, and
intentions can activate.
Agent-based systems provide autonomy,
pro-activity, and social ability to physical de-
vices (Matari
´
c, 2007). An Embedded MAS is a
system running on top of devices, where cognitive
agents are physically connected to resources to per-
a
https://orcid.org/0000-0002-4240-3997
b
https://orcid.org/0000-0002-7099-4974
c
https://orcid.org/0000-0002-0339-6624
ceive and act in the real world and communicability
with other devices (Brand
˜
ao et al., 2021). Com-
monly, these devices use a four-fold architecture: the
hardware layer is composed of the set of resources
(sensors and actuators) that represents the agent’s
capabilities in the real world; the firmware layer is
responsible for the functions that the devices perform
according to the agent’s deliberations. In this layer,
the designer programs the resources connected to one
or more microcontrollers; the interface layer allows
the agent to communicate with the microcontroller
using serial communication. The Embedded MAS
must run in a single-board computer — or any
platform that hosts an Operating System (OS) —
where microcontrollers are connected. Then, in the
reasoning layer, the agent can deliberate based on
perceptions gathered from sensors and act by sending
serial commands (Pantoja et al., 2016).
The resources of an Embedded MAS are defined
only at design time. The designer must define them
before assembling the device, and, once defined, it is
impossible to change them at runtime. For this, the
Embedded MAS must be stopped, and the MAS re-
programmed. The swapping of resources — addition
or removal — is an interesting feature in the develop-
ment of Embedded MAS because it adds adaptability
Lazarin, N., Pantoja, C. and Viterbo, J.
Swapping Physical Resources at Runtime in Embedded MultiAgent Systems.
DOI: 10.5220/0011750700003393
In Proceedings of the 15th International Conference on Agents and Artificial Intelligence (ICAART 2023) - Volume 1, pages 93-104
ISBN: 978-989-758-623-1; ISSN: 2184-433X
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
93

at runtime for agents. The system does not need to be
turned off, and agents could reason about the avail-
ability of resources. In this way, an autonomous agent
can be adaptable, continuing to perform actions to
achieve its goals in case of hardware failure, for exam-
ple. Considering the extant BDI agent-oriented lan-
guages and frameworks (Bordini et al., 2007)(Pokahr
et al., 2005)(Dennis and Farwer, 2008), they do not
initially provide access to physical resources. Argo is
a customized architecture that allows agents to inter-
face with hardware resources, but it is not prepared to
deal with swapping resources (Pantoja et al., 2016).
Adding resources at runtime could be achieved
by adopting an Open MAS and agent mobility. An
open MAS allows agents to enter and leave its system
anytime (Artikis and Pitt, 2008). Another Jason ex-
tension uses bio-inspired protocols for moving agents
from one Embedded MAS to another (Souza de Je-
sus. et al., 2021). Then, one resource could be added,
and one agent with proper plans could be sent to con-
trol this resource. But, even with mobility, the agents
cannot identify the resource removal.
This work presents a new feature for swapping
physical resources at runtime in Embedded MAS.
Therefore, one embedded system that already has
physical resources available may have new resources
attached to it or removed, and agents will automat-
ically be aware of these new resources or their ab-
sence. As the Embedded MAS uses the serial port to
connect to microcontrollers, the agent is aware if the
port is available or not every time it tries to reach it
by perceiving the real world or acting. It aims to im-
prove the MAS’s adaptive capacity and facilitate the
embedded system’s development process. For this,
we extend Argo agents to identify which resource has
been added and removed using a modified version of
Javino (Lazarin and Pantoja, 2015), the serial inter-
face responsible for the message exchange between
the microcontroller and agents. Javino identifies if
the required resource is connected to the device and
informs the agent.
We assembled one device to test these new fea-
tures. A Single Board Computer hosts the Embed-
ded MAS and some microcontrollers managing sen-
sors and actuators. The Embedded MAS is developed
using Jason, the extended Argo agents, and Javino.
The contributions of this work are a novel feature to
swap resources in Embedded MAS using BDI agents
at runtime and an extended version of Argo agents and
Javino for Jason framework. This paper is structured
as follows: Section 2 discusses some related work; In
Section 3, we present the swap approach; The swap
feature is tested in Section 4, and finally, we present
the Conclusions and the References.
2 RELATED WORK
From a practical point of view, the swap of physi-
cal resources at runtime could facilitate the process of
maintaining and expanding an Embedded MAS since
it does need to be stopped to add a new resource or
to remove an existing one. If the domain is critical,
undesirable stops must be avoided at the most, and
turning it off is not an option.
The Argo (Pantoja et al., 2016) architecture is a
BDI agent capable of capturing and filtering the per-
ceptions (Stabile Jr. et al., 2018) coming from the
sensors that sense the environment. It is also capable
of sending commands to activate and deactivate actu-
ators. Argo processes the perceptions directly as be-
liefs, and it can reduce the amount of perceptions by
activating runtime filters, so the agent can focus only
on those necessary to achieve its goals. Argo uses
Javino (Lazarin and Pantoja, 2015) as the serial inter-
face for accessing the device’s resources. Considering
the various layers and steps of the development pro-
cess of an embedded system, Argo facilitates MAS
programming because it abstracts the technological
issues of interfacing hardware. The agent just needs
to know what serial port it is handling. Argo and
Javino do help in the development of MAS, but they
do not offer a mechanism to identify if the port the
agent is handling is available or not. In fact, several
solutions allow to define and employ the devices’ re-
sources at design-time (Michaloski et al., 2022)(Silva
et al., 2020)(Hamdani et al., 2022). In none of these
solutions, the designer adds or removes the resources
without stopping the system.
The Resource Management Architecture
(RMA) (Pantoja et al., 2019) enables the addi-
tion of new devices at the edge of an IoT system
at runtime. A device using the RMA can use an
Embedded MAS to control microcontrollers, and
all information gathered could be forwarded to be
published using the Sensor as a Service model. In
addition, Physical Artifacts using CArtAgO (Ricci
et al., 2009) can be used as a resource with or without
a dedicated MAS (Manoel et al., 2020). These de-
vices can be added or removed from the RMA at any
time. However, although the dynamism of this IoT
architecture, devices can only be added to the network
if it is online. Furthermore, swapping the devices’
resources is only possible during design time, and
it is still impossible to add or remove any resource
without stopping the MAS. Besides, it depends on an
available IoT network for communicating.
The bio-inspired protocols (Souza de Jesus. et al.,
2021) for moving agents allow an Embedded MAS of
a device to take control of another device by moving
ICAART 2023 - 15th International Conference on Agents and Artificial Intelligence
94

all its agents and their respective mental states. How-
ever, the target device must be identical to the source
device for effective hardware control. So, it is still
possible to add additional resources to the target de-
vice at runtime and move agents with proper plans to
handle these new resources. As an Embedded MAS
uses a physical architecture with boards running an
OS with serial interfacing between agents and micro-
controllers, it is possible to add resources at runtime.
Then, once agents can communicate and move from
one MAS to another using bio-inspired protocols, it
is possible to program the agent at design time and
move it at runtime, adopting a protocol that does not
eliminate the target MAS. In this way, knowing the se-
rial port where the new device is connected and send-
ing the agent prepared to handle it, it is possible to
add a resource accessible by BDI agents at runtime in
an Embedded MAS. However, removing agents is not
yet possible, and the solution depends on the available
communication infrastructure.
In our approach, the serial interface informs the
agent about the port availability it is trying to access.
Then, whenever the agent has a new resource con-
nected to the Embedded MAS, it perceives which port
it is connected to. If the resource is removed, the next
time the agent tries to gather the perceptions or act, it
updates its mental state with the unavailability of the
resource. In this new version of Argo, the agent re-
ceives this information each time (in the beginning)
its reasoning cycle is performed. It is also updated at
the end of the cycle if it tries to perform an action us-
ing any resource. With this perception, the agent can
deliberate whether or not to pursue an intention that
might be unreachable.
3 METHODOLOGY
When acting in a dynamic physical environment,
agents must be prepared to reason regarding the avail-
ability of information and resources. Agents can use
their own physical resources to gather information
and act upon this environment. Still, as with any
physical component, these resources could be dam-
aged, unavailable, or changed by improved technolo-
gies. Then, agents must follow the adaptive ability
to be aware of which resources are available when it
needs to use them. Besides, embedded agents must
also be fault tolerant and decide what to do when a
resource is not available or damaged. So, swapping
devices at runtime is a desired feature for any Embed-
ded MAS. In this section, we review the architecture
for constructing a cognitive device using Embedded
MAS and the new feature for swapping physical re-
sources using the Jason framework and Argo agents.
It is necessary to observe a four-fold architecture
to construct a device managed by an Embedded MAS:
1. Hardware. It comprises all available resources of
a device. They are physically connected to a mi-
crocontroller. These sensors and actuators are re-
sponsible for gathering the environment’s percep-
tions and acting upon them. All microcontrollers
employed in the device must also be connected
in serial ports of a single-board computer (or any
micro-processed platform).
2. Firmware. It represents the microcontroller pro-
gramming where the perceptions are mounted and
sent to the Embedded MAS based on the agent-
programming language or framework adopted.
The commands that activate the actuators are also
programmed in response to serial messages.
3. Serial Communication. All messages exchanged
between agents and resources use serial commu-
nication. This layer uses a serial interface to man-
age the message flow between agents and differ-
ent microcontrollers. Agents need to know which
serial port the resources are connected to.
4. Reasoning. It includes the Embedded MAS pro-
gramming running on the single-board computer.
Agents are programmed to automatically under-
stand the perceptions of sensors as beliefs; af-
terward, they can deliberate and send commands
back to activate actuators.
This architecture makes it possible to exchange
resources at runtime on an already-designed device
since all layers are low coupled. New sensors or ac-
tuators can be added to the system anytime since they
are connected to a microcontroller. After this, they
can be connected to a serial port. So, for any agent
to interface these new resources, it would only need
to know which port to access at runtime. However, it
could not know how to manipulate it and would need
to learn these skills some other way.
In this paper, we present an approach that allows
Argo agents to test the availability of serial ports.
Then it can deliberate whether or not to continue
pursuing the goals associated with an unavailable re-
source. Besides, when it becomes available again or
a new resource is inserted at runtime, the agent is
aware of the availability of the serial port. We define
the swapping of resources as the ability to add, re-
move, or exchange physical components to the device
at runtime. This novel ability of BDI agents guaran-
tees that agents could be adaptive and fault-tolerant
regarding hardware resources. The Embedded MAS
— and, consequently, the device — does not need to
be turned off for predictive, preventive, or corrective
Swapping Physical Resources at Runtime in Embedded MultiAgent Systems
95
maintenance. This characteristic could reduce risks
and increase profits in some domains, such as indus-
trial applications.
Any Argo agent interfaces the hardware resources
using a serial interface named Javino by accessing
which port the microcontroller is connected to the
single-board computer. So, when connecting a new
microcontroller with new resources in a device man-
aged by an Embedded MAS (or when removing),
Javino verifies if the port is accessible or not and in-
forms to the Argo agent who is trying to access it by
sending a belief with the port information and if it is
on, off, or timeout. Then, when the device has a new
resource connected the agent automatically receives
this belief and can access the resources. Otherwise,
when the resource is removed or fails, it can deliber-
ate to drop its intentions related to the disconnected
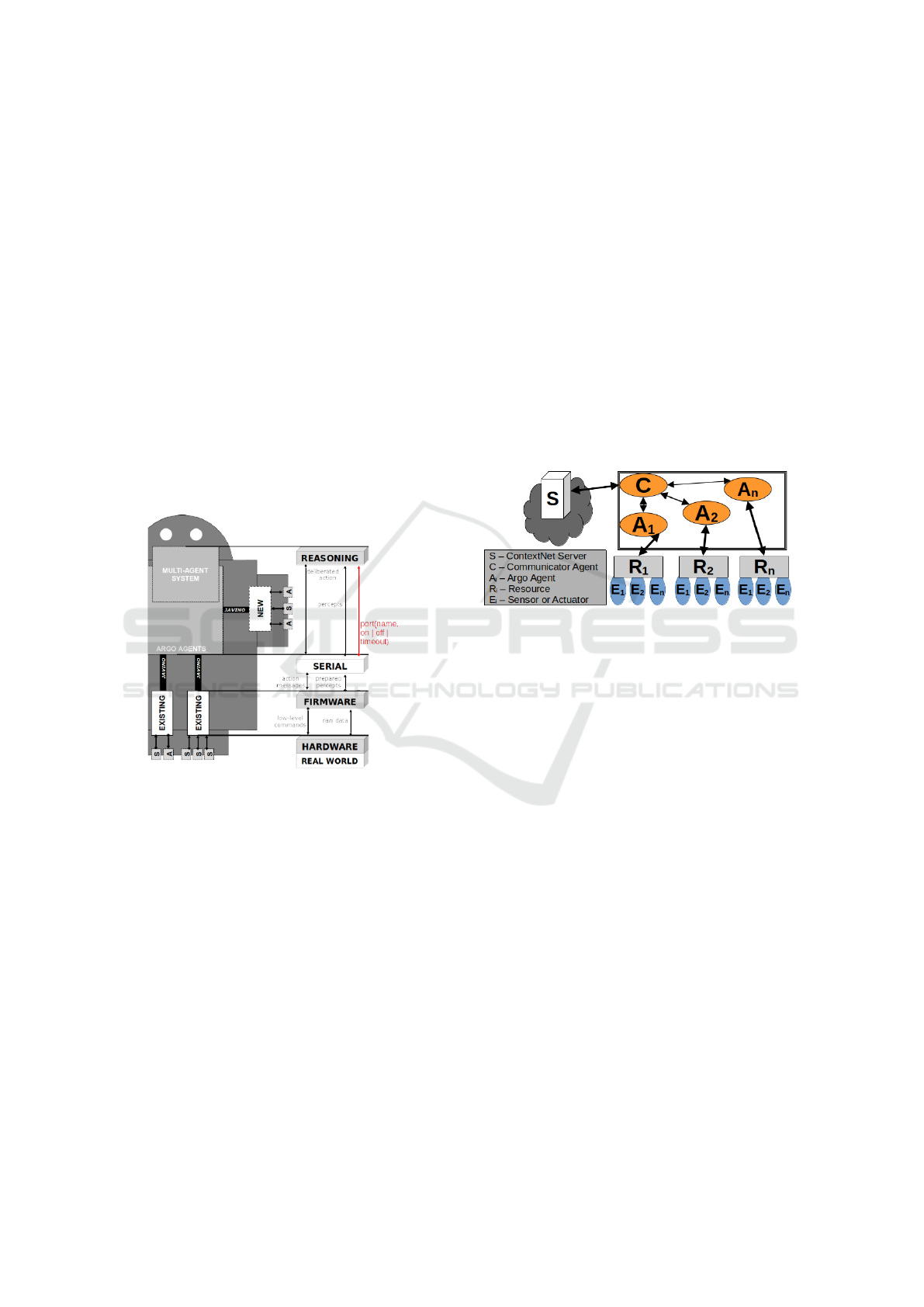
resources, for example. Figure 1 shows the four-fold
architecture and the belief representing the port avail-
ability (i.e., port(name, status)).
Figure 1: The four-fold architecture for programming Em-
bedded MAS on top of hardware devices.
When connecting a new resource in the system,
two possible approaches can occur: an agent needs to
learn how to deal with this new resource, or can be
employed a new agent to handle it. In these cases,
the designer must program an external MAS and use
an IoT network (Endler et al., 2011) infrastructure to
transfer the knowledge (plans) or the agent. At first,
the designer can send the plans directly to a Commu-
nicator agent that redirects the plans to the Argo agent
that controls the serial port. At last, a new Argo agent
with the new desired abilities is transferred to the Em-
bedded MAS using the bio-inspired protocols (Souza
de Jesus. et al., 2021). Once the agent arrives at the
destination, it can control the new resources and in-
teract with the other existing agents in that system.
The practical intention is to create cognitive de-
vices where agents are not dependent on resource
availability. Agents can be stuck in pursuing goals
that could be momentarily or permanently unreach-
able since the resources are not available anymore.
In the worst case, the agent could deliberate based
on wrong information, or the whole Embedded MAS
could crash with malformed beliefs.
To provide adaptability at Embedded MAS at run-
time, mainly for the addition of new resources or for
updating existing resources is mandatory that the sys-
tem be built with a communicator agent connected to
an IoT server. In this way, the system can receive new
plans for an Argo agent that already manipulates a re-
source or can receive a new Argo agent that is capable
of manipulating the resource to be added. Figure 2
presents the proposed approach for building an Em-
bedded MAS capable of swapping resources at run-
time.
Figure 2: The swapping methodology for Embedded MAS.
3.1 The Swap Feature in Argo Agents
Argo agents is a customized architecture from Jason’s
framework for interfacing hardware resources. All the
information gathered from sensors is interpreted as
perceptions by Argo. Then, when programming Argo
agents at design time, the designer needs to inform the
serial port that the agent interfaces to the perceptions
flow directly to the agent’s belief base. It is important
to remark that this process still occurs when resources
fail or become unavailable. As said before, the agent
is unaware of the port availability, which could lead
to undesired behaviors.
Argo has the ability to change the serial port it is
accessing and block the flow of perceptions at any
time. If Argo is aware that a serial port is not an-
swering anymore, it could try to reach another port
or simply block the perceptions from that port. Then,
when swapping resources, Argo agents need to access
the status of the port which is trying to reach. For
this, we defined a belief port(Name, Status), where
the name identifies the serial port name, and the sta-
tus indicates if it is on, off or timeout. For example,
when removing a resource located at serial port name
ttyACM0, the agent receives directly in its belief base
port(ttyACM0, off).
ICAART 2023 - 15th International Conference on Agents and Artificial Intelligence
96

Figure 3: The Argo’s extended reasoning cycle.
Every BDI agent from Jason performs a well-
defined reasoning cycle where the agent executes an
expected behavior in each step. Argo has an extended
reasoning cycle that modifies two distinct steps at the
beginning of the cycle, when the agents perceive the
real environment to gather perceptions, and at the end,
when it acts, sending commands to actuators. The re-
maining steps are inspired by the Practical Reasoning
System (PRS) (Bratman et al., 1988). It defines which
events will trigger plans and intentions to define the
sequence of actions to be performed.
In the perceive step of an Argo’s reasoning cy-
cle, the Javino is the serial interface responsible for
gathering the perceptions from sensors and forward-
ing them to the Belief Update Function (BUF). Javino
requests the perceptions by accessing the microcon-
troller whenever the agent performs a cycle. In this
step, we modified Javino to inform whether or not the
serial port the agent is trying to connect to is available.
In the same way, at the end of the cycle, the agent
performs actions that can reflect in commands to be
sent to actuators. In this step, Javino is also respon-
sible for sending serial commands to the microcon-
troller. In this case, we modified the internal action
named act to update the agent’s belief base by adding
the port(Port, off) belief in case the serial port is un-
available anymore. Javino tries to access the port, and
in case of failure, it returns the aforementioned be-
lief. The modified reasoning cycle of Argo agents is
presented in Figure 3.
4 CASE STUDY
To present the case study, we considered the scenario
of a house with its water supply system managed by
an Embedded MAS. The house, shown in Figure 4,
has two supply sources (cistern and well) controlled
by resources 1 and 2. Both have a minimum water
level sensor and an actuator that controls the collec-
tion pump.
Figure 4: The scenario of the smart home and its resources.
The captured water is stored in a water tank man-
aged by resource 3 with two sensors, one to indicate
Swapping Physical Resources at Runtime in Embedded MultiAgent Systems
97

the minimum level and another to indicate the max-
imum level. Finally, resource 4 installed on the roof
of the house consists of a sensor to indicate when it is
raining.
This case study consists of analyzing six possible
scenarios presented in Table 1.
Table 1: The summary of the case studies.
Resource
Scenario 1 2 3 4
0 operating operating operating -
1 operating operating failure -
2 maintenance operating operating -
3 operating swapped operating -
4 operating operating updated -
5 operating operating operating added
• (Scenario 0:) This scenario represents the normal
functioning of the house. When the reservoir (re-
source 3) indicates a low water level, the power
supplies (resources 1 and 2) must transfer water
to the reservoir. The supply is interrupted if any
source indicates that the water level is low. The
supply must be stopped when the reservoir indi-
cates that the water level is full.
• (Scenario 1:) This scenario represents a failure
in resource 3, which is responsible for managing
reservoir levels. If this failure occurs, the water
supply must be immediately interrupted until the
resource is available again.
• (Scenario 2:) This scenario represents mainte-
nance on resource 1, responsible for managing the
cistern (water captured by rain). When this re-
source is under maintenance, the water supply is
managed only by resource 2.
• (Scenario 3:) This scenario represents a replace-
ment of resource 2, which is responsible for man-
aging the well (groundwater source). In this case,
the resource will be replaced by another resource
with different sensors. This new resource informs
new types of perceptions from sensors to the Em-
bedded MAS. In this case, it also maintains com-
patibility with the removed resource.
• (Scenario 4:) This scenario represents a replace-
ment of resource 3, which is responsible for man-
aging the water level in the reservoir (water tank).
In this case, the resource will be replaced by a
resource with different sensors incompatible with
the removed resource.
• (Scenario 5:) This scenario represents the addi-
tion of a fourth resource to the Embedded MAS,
which is responsible for sensing rain. This re-
source adds the ability to use rainwater in the
house. Even if the reservoir is not indicating that
it is at the minimum water level when it is raining,
it will request the activation of resource 1 until it
is complete, looking to optimize the capacity of
rainwater tank storage.
4.1 Embedded MAS Implementation
To fulfill the proposed scenarios, we implemented
an Embedded MAS
1
, which runs and controls the
following physical devices: a single-board computer
(Raspberry Pi 3) to host the reasoning layer and some
microcontrollers (Arduino) to host the firmware layer.
The Cognitive Hardware on Network - Operational
System (ChonOS
2
) was used to develop the Embed-
ded MAS, a specific-purpose GNU/Linux distribu-
tion for facilitating the development and debugging
of agent-based embedded systems.
The microcontroller and the single-board com-
puter communication are performed using a serial
port, mediated by the Javino
3
library. Figure 5
presents the schematic of the implementation.
Figure 5: The device’s physical components available for
the Embedded MAS.
4.1.1 Firmware Layer
The microcontrollers respond to the agents, sending
the perceptions gathered from sensors or executing
1
http://icaart2023.chon.group/
2
http://chonos.sf.net
3
http://javino.sf.net
ICAART 2023 - 15th International Conference on Agents and Artificial Intelligence
98

the actuation commands. Resource 1 is connected
to serial port /dev/ttyACM0 and accepts the cistern-
PumpOn and cisternPumpOff commands to turn the
cistern pump on and off. Additionally, it receives the
getPercepts command at each cycle execution, which
returns the following perceptions to the agent:
• resource(cistern), the resource ID;
• pump(cistern, on | off), indicating whether the up-
take pump is on or off; and
• level(cistern, empty | ˜empty), indicating whether
or not the cistern is at its minimum water level.
Resource 2 is connected to the serial port
/dev/ttyACM1 and accepts the wellPumpOn and
wellPumpOff commands to turn the well pump on
and off. Additionally, it accepts the getPercepts
command, which returns the following perceptions:
• resource(well), the resource ID;
• pump(well, on | off), indicating whether the uptake
pump is on or off;
• level(well, empty | ˜empty), indicating whether or
not the well is at its minimum water level.
Resource 3 is connected to the serial port
/dev/ttyACM2 and accepts the getPercepts com-
mand, which returns the following perceptions:
• resource(tank), the resource’s identification;
• level(well, empty | ˜empty | full), indicating
whether the water tank is empty, not empty or full.
4.1.2 Resources Swapped at Runtime
To exemplify scenario 3, a new resource 2 shown in
Figure 6 was built. This resource differs from the old
one by using an ultrasound sensor. This new resource
model must be connected to the same serial port as
the old one and be compatible with the commands ac-
cepted by the previous one to guarantee the success of
scenario 3. In addition, it must maintain compatibility
with the getPercepts command, returning information
in the same format as the previous one. In addition,
the resource may provide new beliefs. In this case, the
resource informs the precisionLevel(well, CM), indi-
cating the supply source level in centimeters.
To exemplify scenario 4, was built a new resource
3 to manage the water reservoir level shown in Fig-
ure 7. Unlike the old one that used a level sensor, this
one uses an ultrasonic sensor and provides the reser-
voir level only in centimeters. The getPercepts com-
mand returns the following information:
• resource(tankNewModel), resource identification;
• level(tankNewModel,CM), indicating the water
level in the tank.
Figure 6: The new resource 2.
Figure 7: The new resource 3.
To exemplify scenario 5, the resource 4 shown
in Figure 8 was built. It was connected to the
/dev/ttyACM3 serial port. It returns the following in-
formation:
• resource(rain), the resource identification;
• rainStatus(raining | ˜raining), indicating whether
or not it is raining.
4.1.3 Reasoning Layer
We implemented a MAS using the Jason framework
in the reasoning layer, composed of five agents with
well-defined functions. Three extended Argo agents,
one Jason agent, and one communicator agent.
All Argo agents control the available resources of
the house. Initially, the CisternPhantom controls re-
source 1, the WellPhantom controls resource 2, and
the TankPhantom controls resource 3. They must con-
nect to the respective serial port to control their re-
sources. Then, they all have two initial beliefs, rep-
resenting which serial port to access and the name
of the resource: myResourcePort(Port) and myRe-
Swapping Physical Resources at Runtime in Embedded MultiAgent Systems
99

Figure 8: The resource 4.
source(Resource). Besides, Argo agents can con-
trol the interval time of gathering information from
sensors and decide when open or close the flow of
perceptions coming. CisternPhantom and WellPhan-
tom agents has two achievement plans (+!conf and
+!pump(Op)). The former sets up the serial port
(.port()), the minimum interval of perceiving the en-
vironment (5 seconds), and opens the perception flow
directly to the agent’s mind (.percepts(open)). The
latter has two possible contexts: send the microcon-
troller the commands to turn on or off the respective
pump. Finally, it has a belief plan (+level(R, S)) that
triggers a plan to turn off the pump (!pump(off)) if,
during the water filling, the water level reaches the
minimum. Codes 1, 2, and 3 shows the CisternPhan-
tom, WellPhantom, and TankPhantom implementa-
tion.
The fourth agent (Lurch) is a Jason agent
who manages the house’s functioning. This agent
has two achievement plans: +!getInformation and
+!pump(Op). The former updates its beliefs about the
resources’ state and agents every 5 seconds by con-
sulting all agents (.broadcast(askOne, Literal)). The
latter sends messages to the WellPhantom and Cis-
ternPhantom agents to turn on or off the water sup-
ply. In addition, it has three belief plans: the first
(+ready(no)) is specific for if the reservoir agent is
not available, it requests to interrupt the water sup-
ply; the last two (+level(tank, S)) request the activa-
tion or deactivation of the water supply, according to
the reservoir level. Code 4 shows Lurch implementa-
tion.
The fifth agent (Morticia) is a Communicator
agent that uses an IoT middleware to communicate
with other MAS. Its initial beliefs have the informa-
tion to connect with the ContextNet server. It is neces-
Code 1: CisternPhantom in addamsMansion.mas2j.
myResourcePort(ttyACM0).
myResource(cistern).
!conf.
+!conf: myResourcePort(R)<-
.port(R); .limit(5000); .percepts(open).
+!pump(Op)[source(X)]: Op=on & ready(R) &
R=yes & level(LR,S) & S=˜empty & pump(PR,PS)
& PS=off<-
.act(cisternPumpOn).
+!pump(Op)[source(X)]: Op=off & ready(R) &
R=yes & pump(PR,S) & S=on <-
.act(cisternPumpOff).
+level(R,S): myResource(MyR) & R=MyR &
S=empty & pump(P,F) & P=MyR & F=on <-
!pump(off).
Code 2: WellPhantom in addamsMansion.mas2j.
myResourcePort(ttyACM1).
myResource(well).
!conf.
+!conf: myResourcePort(R)<-
.port(R); .limit(5000); .percepts(open).
+!pump(Op)[source(X)]: Op=on & ready(R) &
R=yes & level(LR,S) & S=˜empty & pump(PR,PS)
& PS=off<-
.act(wellPumpOn).
+!pump(Op)[source(X)]: Op=off & ready(R) &
R=yes & pump(PR,S) & S=on <-
.act(wellPumpOff).
+level(R,S): myResource(MyR) & R=MyR &
S=empty & pump(P,F) & P=MyR & F=on <-
!pump(off).
Code 3: TankPhantom in addamsMansion.mas2j.
myResourcePort(ttyACM2).
myResource(tank).
!conf.
+!conf: myResourcePort(R)<-
.port(R); .limit(5000); .percepts(open).
ICAART 2023 - 15th International Conference on Agents and Artificial Intelligence
100

Code 4: Lurch in addamsMansion.mas2j.
!getInformation.
+!getInformation <-
.abolish(ready(
)[ ]);
.abolish(pump( , )[ ]);
.abolish(level( , )[ ]);
.broadcast(askOne, ready(S));
.broadcast(askOne, pump(P,S));
.broadcast(askOne, level(P,S));
.wait(5000);
!getInformation.
+!pump(Op) <-
.send(cisternPhantom,achieve,pump(Op));
.send(wellPhantom,achieve,pump(Op)).
+ready(no)[source(tankPhantom)] <-
.abolish(level( , )[source(tankPhantom)]);
!pump(off).
+level(tank,S)[source(tankPhantom)]: S=full <-
!pump(off).
+level(tank,S)[source(tankPhantom)]:S=empty<-
!pump(on).
sary to have a Universally Unique Identifier (UUID),
the address of a public IoT server, and the connec-
tion port. Morticia has two achievement plans: one
to connect to the server (+!connect) and a plan for
retransmitting messages received from other MAS to
some internal agent (+!retransmit(Dest, Force, Con-
tent)). Code 5 show the Morticia implementation. Fi-
nally, it has a belief plan (+communication(trying)) to
respond to any possible external communication at-
tempt received.
4.2 Scenarios 0-3
The Embedded MAS operates properly for scenario 0.
To comply with scenarios 1, 2, and 3, all Argo agents
in the MAS have plans to deal with possible commu-
nication failures (scenario 1), unavailability (scenario
2), and even resource switching (scenario 3), as long
as it maintains compatibility with beliefs previously
known by the agent.
The Code 6 shows two belief plans: the first (+re-
source(R)) checks if the resource connected to the se-
rial port the agent is managing is the same resource
it expects. The second (+port(Port, Status)) has two
distinct contexts: if the status is off, timeout, or on,
the agent updates its belief (-+ready(Literal)) about
Code 5: Morticia in addamsMansion.mas2j.
myID(“feee647d-c798-44c0-a6d2-099d88e8a59d”).
cNAddress(“skynet.chon.group”).
cNPort(3273).
!connect.
+!connect: myID(ID) & cNAddress(S) &
cNPort(P)<-
.connectCN(S,P,ID).
+!retransmit(Dest,Force,Content)[source(X)] <-
.send(Dest,Force,Content).
+communication(trying)[source(X)] <-
.sendOut(X,tell,communication(ok)).
Code 6: Generic Beliefs Plans for all Argo Agents.
+resource(R): myResource(MyR) & MyR \== R <-
-+ready(no).
+port(Port,Status): (Status=off |Status=timeout) <-
-+ready(no).
+port(Port,Status): Status=on & resource(R) &
myResource(MyR) & MyR=R <-
-+ready(yes).
being able to interface with the environment.
4.3 Scenario 4
Scenario 4 consists of exchanging a resource for an-
other different from the existing one. In this scenario,
the new resource must be connected to the same serial
port as the old one. In addition, it will be necessary
to transfer new plans so that the agent can continue to
perform its function. A new MAS with only one com-
municator agent (Cousin Itt) was programmed on the
developer’s computer to transfer the necessary plans
to the TankPhantom agent. Itt is responsible for con-
necting to the ContextNet server and transferring the
plans to the communicator agent of the embedded
MAS (Morticia). Code 7 presents the new plans.
The agent’s initial beliefs are the UUID of the tar-
get communicator agent — Morticia, in Embedded
MAS —, the UUID used to connect to the contextNet
network, the server address, and the port. In addition,
Itt has five achievement plans: the first (+!conf()) is
responsible for connecting the Itt’s MAS in the con-
textNet server; the second (!test) tries to communicate
with the addressed MAS, sending a belief (commu-
nication(trying)) and expecting a belief in response
(communication(ok)), thereby establishing the com-
munication channel between the both MAS; the third
Swapping Physical Resources at Runtime in Embedded MultiAgent Systems
101

Code 7: Cousin Itt in Itt’s Office.mas2j.
house(“feee647d-c798-44c0-a6d2-099d88e8a59d”).
myID(“d1f8a5d5-b720-4a4b-88e2-2542a44a2964”).
cNAddress(“skynet.chon.group”).
cNPort(3273).
!conf.
+!conf: myID(ID) & cNAddress(S) & cNPort(P) <-
.connectCN(S,P,ID); +connected; !test.
+!test : connected & house(Morticia) & not
communication(ok) <-
.sendOut(Morticia, tell, communication(trying));
.wait(3000); !test.
+!test: communication(ok) <- !transmit.
+!transferKnowledge(R, K): house(M) <-
.sendOut(M, achieve, retransmit(R,tellHow,K)).
+!requestExecution(R, O): house(M) <-
.sendOut(M, achieve, retransmit(R,achieve,O)).
+!transmit <-
!transferKnowledge(tankPhantom,
“+!newResource(X)[source(Z)] <-
.percepts(close); .abolish(resource( )[ ]);
.abolish(myResource( )[ ]);
.abolish(ready( )[ ]);.abolish(port( , )[ ]);
.abolish(level( , )[ ]);
+myResource(X); .percepts(open).”);
!requestExecution(tankPhantom,
newResource(tankNewModel));
!transferKnowledge(lurch, “+!newPerceptions:
level(tankNewModel,V)[source(tankPhantom)]
& V<10 <- !pump(inactive); .wait(5000);
!newPerceptions.”);
!transferKnowledge(lurch, “+!newPerceptions:
level(tankNewModel,V)[source(tankPhantom)]
& V>50 <- !pump(active); .wait(5000);
!newPerceptions.”);
!transferKnowledge(lurch, “+!newPerceptions <-
.wait(5000); !newPerceptions.”);
!requestExecution(lurch, newPerceptions);
.disconnectCN;
.stopMAS.
(+!transferKnowledge(R, K)), sends plans to a spe-
cific agent in the Embedded MAS; the fourth (+!re-
questExecution(R, O)) sends an achieve message to be
pursued by a specific agent in the Embedded MAS;
the last one (!transmit) is the plan responsible for
transferring the new plans to the agents in the Em-
bedded MAS.
4.4 Scenario 5
Scenario 5 adds an entirely new resource to the Em-
bedded MAS. For this, it is necessary to verify which
serial port the resource will acquire at the desti-
nation MAS and send a new agent to control the
new resource. To add a new resource at runtime
in the Embedded MAS (addamsMansion.mas2j), an-
other MAS was created on the developer’s computer
(uncleFesterLab.mas2j). This MAS has a communi-
cator agent (uncleFester) responsible for transferring
a second agent Argo (roofPhantom), to the Embedded
MAS.
Code 8 presents UncleFester plans. UncleFester
has the following initial beliefs: Morticia’s UUID, its
own UUID, the ContextNet server address, and the
port. The agent has five achievement plans: the first
(!conf ) connects to the ContextNet server; the sec-
ond (!test) tests the connection with the communica-
tor agent of the destination MAS (Morticia) by send-
ing a belief referring to the connection, and a belief is
expected in response. The third (!sendAgent(Agent))
contains the actions to activate the transferring pro-
tocol; the fourth (!requestExecution(R, O)) sends an
achievement message to the Embedded MAS to exe-
cute a specific plan. The fifth (!transmit) orchestrates
how to send the agent and the achievement message
to the Embedded MAS.
Finally, Code 9 presents the RoofPhantom’s plans
that will be transferred to the Embedded MAS. This
agent has the following initial beliefs: the serial
port address of the device it will manage (myResour-
cePort(ttyACM3)); and the name of the resource it
will manage (myResource(rain)). This agent has two
achievement plans: one to set up the serial interfac-
ing (!conf ) and a plan with the actions to request the
activation of the water pump from the cistern during
the rain. It also has a plan in case the water reservoir
is full during the rain. Finally, it has a belief addition
plan, which requests information from the reservoir
when it identifies the onset of rain.
5 CONCLUSIONS
This work presented a methodology for swapping re-
sources at runtime in Embedded MAS using Jason
and customizable agent architectures capable of inter-
facing hardware and moving plans and agents through
an IoT network. Adding resources allows an Em-
bedded MAS to be updated and improved at run-
time without having to stop it. Stopping a MAS can
lead to some undesired situations, for example, in a
mission-critical domain, which could generate fail-
ICAART 2023 - 15th International Conference on Agents and Artificial Intelligence
102

Code 8: Uncle Fester in FesterLab.mas2j.
house(”feee647d-c798-44c0-a6d2-099d88e8a59d”).
myID(”19566fee-4bc6-45eb-8f72-455552d50116”).
cNAddress(”skynet.chon.group”).
cNPort(3273).
!conf.
+!conf: myID(ID) & cNAddress(S) & cNPort(P) <-
.connectCN(S,P,ID);
+connected; !test.
+!test : connected & house(Morticia) & not
communication(ok)<-
.sendOut(Morticia, tell, communication(trying));
.wait(3000);
!test.
+!test: communication(ok) <-
!transmit.
+!sendAgent(Agent): house(H) <-
.moveOut(H,mutualism,Agent).
+!requestExecution(R, O): house(H) <-
.sendOut(H, achieve, .retransmit(R,achieve,O)).
+!transmit <-
!sendAgent(roofPhantom);
!requestExecution(roofPhantom, conf);
.disconnectCN;
.stopMAS.
Code 9: roofPhantom in festerLab.mas2j.
myResourcePort(ttyACM3).
myResource(rain).
+!conf: myResourcePort(R)<-
.port(R);
.limit(5000);
.percepts(open).
+!economizeWater: level(tankNewModel,V)
& V>10
& V<50 <-
.send(cisternPhantom,achieve,pump(on)).
-!economizeWater <- .
+rainStatus(raining) <-
.send(tankPhantom, askOne,
level(tankNewModel,V), Reply);
-+Reply;
!economizeWater.
ures because of the absence of information. Besides,
when adding a new resource, it would be necessary to
modify the physical structure of the device, offering
some continuity and availability risks of the service
that the device is running. Currently, any resource ad-
dition forces the device to be turned off, limiting the
adaptability inherent to a Cognitive MAS.
This discussion can also be expanded toward re-
placing and removing resources at runtime. In embed-
ded systems, it is not uncommon for components to be
damaged when interacting with the real world, given
their unpredictability. In our approach, the replace-
ment could be performed without risks to the Em-
bedded MAS if the damaged resource is replaced by
another one of the same logical structure connected
to the same serial port. Removing a resource —
whether damaged or intentionally removed — leads
to readapting the Embedded MAS so as not to pur-
sue intentions and objectives that can no longer be
achieved due to the absence of interfacing. In this
case, mechanisms for removing intentions, objectives,
or plans are necessary.
Regarding the composition of agents of an Em-
bedded MAS for the swapping of resources at run-
time, it is mandatory to have a Communicator agent to
send agents and plans from one MAS to another since
the communication between different MAS happens
using an IoT network which only these agents have
access. Besides, these agents are responsible for in-
voking bio-inspired protocols. In this work, we use
Mutualism for its non-destructive behavior for the ori-
gin and destiny MAS. All agents in our methodology
are specialized by option. Every agent has specific
skills (e.g., communicators, communicate and Argo
agents interface hardware). The existence of hybrid
agent architectures would be possible. However, such
an option could overload the agent’s reasoning since
both the flow of messages and perceptions can gener-
ate undesirable bottlenecks in processing.
The swapping of resources at runtime still requires
a multidisciplinary effort from the designer team
since it has to know several areas (electronics, operat-
ing systems, object-oriented and agent-oriented pro-
gramming). In future work, a mechanism is needed
for the dynamic management of resources in Embed-
ded MAS so that, when adding a new resource, the
MAS would automatically recognize the device and
its functionalities without the need to transfer agents
from other systems. For example, if the house pre-
sented in the case study is using a dynamic mech-
anism addition of resources in its Embedded MAS,
it would be enough to connect it to the house, and
all the necessary skills would be automatically loaded
into the Embedded MAS. For instance, one limitation
is that the agent needs to know the hardware being
added and depend on an available IoT infrastructure.
Swapping Physical Resources at Runtime in Embedded MultiAgent Systems
103

REFERENCES
Artikis, A. and Pitt, J. (2008). Specifying open agent sys-
tems: A survey. In International Workshop on Engi-
neering Societies in the Agents World, pages 29–45.
Bordini, R., H
¨
ubner, J., and Wooldridge, M. (2007). Pro-
gramming Multi-Agent Systems in AgentSpeak using
Jason. Wiley Series in Agent Technology. Wiley.
Brand
˜
ao, F. C., Lima, M. A. T., Pantoja, C. E., Zahn, J., and
Viterbo, J. (2021). Engineering approaches for pro-
gramming agent-based iot objects using the resource
management architecture. Sensors, 21(23).
Bratman, M. E. (1987). Intention, Plans and Practical Rea-
soning. Cambridge Press.
Bratman, M. E., Israel, D. J., and Pollack, M. E.
(1988). Plans and resource-bounded practical reason-
ing. Computational intelligence, 4(3):349–355.
Dennis, L. A. and Farwer, B. (2008). Gwendolen: A BDI
language for verifiable agents. In Proceedings of the
AISB 2008 Symposium on Logic and the Simulation
of Interaction and Reasoning, Society for the Study
of Artificial Intelligence and Simulation of Behaviour,
pages 16–23.
Endler, M., Baptista, G., Silva, L. D., Vasconcelos, R.,
Malcher, M., Pantoja, V., Pinheiro, V., and Viterbo,
J. (2011). Contextnet: Context reasoning and shar-
ing middleware for large-scale pervasive collaboration
and social networking. In Proceedings of the Work-
shop on Posters and Demos Track, PDT ’11, New
York, NY, USA. Association for Computing Machin-
ery.
Hamdani, M., Sahli, N., Jabeur, N., and Khezami, N.
(2022). Agent-Based Approach for Connected Vehi-
cles and Smart Road Signs Collaboration. Computing
and Informatics, 41(1):376–396.
Lazarin, N. M. and Pantoja, C. E. (2015). A robotic-agent
platform for embedding software agents using rasp-
berry pi and arduino boards. In 9th Software Agents,
Environments and Applications School.
Manoel, F., Pantoja, C. E., Samyn, L., and de Jesus, V. S.
(2020). Physical Artifacts for Agents in a Cyber-
Physical System: A Case Study in Oil & Gas Scenario
(EEAS). In SEKE, pages 55–60.
Matari
´
c, M. J. (2007). The Robotics Primer. Mit Press.
Michaloski, J., Schlenoff, C., Cardoso, R., Fisher, M., and
others (2022). Agile Robotic Planning with Gwen-
dolen.
Pantoja, C. E., Soares, H. D., Viterbo, J., Alexandre, T.,
Seghrouchni, A. E.-F., and Casals, A. (2019). Ex-
posing iot objects in the internet using the resource
management architecture. International Journal of
Software Engineering and Knowledge Engineering,
29(11n12):1703–1725.
Pantoja, C. E., Stabile, M. F., Lazarin, N. M., and Sich-
man, J. S. (2016). Argo: An extended jason archi-
tecture that facilitates embedded robotic agents pro-
gramming. In Baldoni, M., M
¨
uller, J. P., Nunes, I.,
and Zalila-Wenkstern, R., editors, Engineering Multi-
Agent Systems, pages 136–155, Cham. Springer Inter-
national Publishing.
Pokahr, A., Braubach, L., and Lamersdorf, W. (2005).
Jadex: A BDI reasoning engine. In Multi-agent pro-
gramming, pages 149–174. Springer.
Ricci, A., Piunti, M., Viroli, M., and Omicini, A. (2009).
Environment Programming in CArtAgO, pages 259–
288. Springer US, Boston, MA.
Silva, G. R., Becker, L. B., and H
¨
ubner, J. F. (2020).
Embedded architecture composed of cognitive agents
and ros for programming intelligent robots. IFAC-
PapersOnLine, 53(2):10000–10005. 21st IFAC World
Congress.
Souza de Jesus., V., Pantoja., C., Manoel., F., Alves., G.,
Viterbo., J., and Bezerra., E. (2021). Bio-inspired pro-
tocols for embodied multi-agent systems. In Proceed-
ings of the 13th International Conference on Agents
and Artificial Intelligence - Volume 1: ICAART,, pages
312–320. INSTICC, SciTePress.
Stabile Jr., M. F., Pantoja, C. E., and Sichman, J. S.
(2018). Experimental Analysis of the Effect of Filter-
ing Perceptions in BDI Agents. International Journal
of Agent-Oriented Software Engineering, 6(3-4):329–
368.
Wooldridge, M. (2009). An Introduction to MultiAgent Sys-
tems. Wiley.
ICAART 2023 - 15th International Conference on Agents and Artificial Intelligence
104
