
Development of Learning System to Support
for Passing Steps of Wheelchair
Kotone Sakiyama
1
, Yukie Majima
2
and Seiko Masuda
2
1
Graduate School of Humanities and Sustainable System Sciences, Osaka Prefecture University, Osaka, Japan
2
Graduate School of Informatics, Osaka Metropolitan University, Osaka, Japan
Keywords: Learning Support, System Development, Wheelchair.
Abstract: Recent aging of the population has led to an increased number of persons requiring assistance and a shortage
of caregivers. Wheelchairs are often used for transportation by people who require assistance, but they must
use appropriate operating techniques because they can easily impose burdens on caregivers when climbing
over steps. Therefore, for this study, an educational system was developed based on issues elucidated by
conventional educational methods and earlier research. Assistive technology evaluation in this system is
performed from the perspective of a passenger's riding comfort by measuring and analyzing the wheelchair’s
degree of tilt and vibration level using a sensor. The system provides a learner with feedback for adopting an
appropriate operating posture based on the evaluation results. This system can engender efficient learning by
quantitatively measuring and presenting the learner's level of proficiency and by providing immediate
feedback according to the user’s proficiency level.
1 INTRODUCTION
In recent years, the population in Japan has been
aging rapidly: as of October 2018, the population
aged 65 and over numbered 35.58 million. The ratio
of aged persons, as a percentage of the total
population, was 28.1% (Cabinet Office, 2018),
representing an increase of 6.0% from 22.1% during
the prior decade (Cabinet Office, 2008). That increase
in the number of persons requiring assistance
(Cabinet Office, 2017) and the shortage of caregivers
(Ministry of Health, Labour and Welfare, 2021)
accompanying the aging population have come to
pose major difficulties for Japan.
Wheelchairs are extremely common assistive
devices for people who need caregivers. Of course,
wheelchair mobility requires appropriate caregiving
techniques so that caregivers do not feel burdened
even if they are elderly or female. Particularly,
climbing over steps in a wheelchair requires lifting of
the front and rear wheels, which can impose heavy
burdens on a caregiver. Accidents such as falling
down and loss of riding comfort can also occur
because of inappropriate wheelchair assistance.
Therefore, caregiver education for appropriate
wheelchair assistance skills must be provided.
In recent years, asynchronous caregiver education
including e-learning and video materials has become
possible because of the rapid spread of online
education. Nevertheless, many caregiving skills
involve tacit knowledge such as how to apply force
and how to move the body. Therefore, quantitative
evaluation of improvement in the skills of unskilled
caregivers (unskilled caregivers) in asynchronous
education is difficult.
For this study, we developed a system that uses
sensors to evaluate wheelchair assistance skills
quantitatively, especially when climbing over steep
steps. The system educates non-skilled users about
the appropriate operation of wheelchairs.
2 WHEELCHAIR ASSISTANCE
EDUCATION SYSTEM
What should be done to help non-skilled workers
acquire appropriate operation skills through
asynchronous education? We can review some
challenges of conventional asynchronous education
in the course of education.
Sakiyama, K., Majima, Y. and Masuda, S.
Development of Learning System to Support for Passing Steps of Wheelchair.
DOI: 10.5220/0011772500003414
In Proceedings of the 16th International Joint Conference on Biomedical Engineering Systems and Technologies (BIOSTEC 2023) - Volume 5: HEALTHINF, pages 497-501
ISBN: 978-989-758-631-6; ISSN: 2184-4305
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
497

2.1 Functional Requirements
During current nursing and caregiving education,
most teaching materials that particularly address
wheelchairs are based on videos and texts. Evaluation
of learning is based on the number of times the
material is viewed or a test to confirm knowledge
retention. Nevertheless, the degree of actual
improvement of skills is not evaluated quantitatively.
It therefore remains unclear whether students have
acquired the appropriate operating techniques, or not.
To resolve this difficulty, Huang et al. (2014)
proposed a self-study support system that extracts the
wheelchair transfer techniques and skills of skilled
nurses, teaches them to learners, and evaluates them
using a Kinect™ motion sensor (Microsoft Corp.).
Later, Nakagawa et al. (2015) proposed a skill
teaching system that emphasizes skill teaching and
which evaluates skills using a similar sensor. They
reported that this system enables learners to
understand their proficiency level quantitatively and
to learn more efficiently than the conventional
teaching by video, voice, or text. Based on those
earlier studies, we believe that an effective
educational system that is more effective than
conventional teaching methods requires a teaching
function, a sensor-based measurement function, and
an evaluation function that evaluates wheelchair
assistance skills quantitatively.
Compared to conventional video-based or text-
based teaching methods, the sensor-based technology
teaching system provides immediate feedback to the
learner, which helps the learner to visualize the skill.
However, previously described systems (Huang et al.,
2014; Nakagawa et al., 2015) require special
equipment and personnel with specialized knowledge
to operate the equipment, which makes learning
difficult. By contrast, this system will enable
unskilled users to learn proper wheelchair operation
using a smartphone (iPhone; Apple Corp.), a common
device, for skill measurement and using an interface
designed to require no complicated operations.
2.2 Technical Evaluation
Preventing a decrease in wheelchair users’ comfort
and reducing burdens on caregivers when operating
wheelchairs are necessary. Factors reported as
reducing riding comfort include increased wheelchair
movement speed (Tanaka et al., 2006), large
gradients when ascending or descending a ramp
(Yamada et al., 2004), and strong bumping when
passing over a step (Narisawa et al., 2001).
Particularly, the lifting angle of the wheelchair
and the vibration felt by the user are regarded as
affecting the ride quality, especially when the
wheelchair is lifted up and down, because the
operator stops near a step and starts the operation
when climbing over a step. Noto and Muraki (2016)
analyzed the relation between the caregiver's posture
during the operation, the wheelchair trajectory, and
the caregiver's subjective evaluation. Results clarified
that increased leaning of the wheelchair when the
front wheels are lifted when climbing over a step can
decrease the user’s riding comfort. Sawada et al.
(2007) specifically examined the vibration level,
which is an index of vibration felt by the human body,
and analyzed the vibration level of a wheelchair when
climbing over a step. Results clarified that the
vibration at frequencies of 20–30 Hz generated in the
vertical direction affect the user’s riding comfort.
For this study, based on methods used for earlier
studies, we use the tilt of the wheelchair body when
the front wheels are lifted and the vibration level
during wheelchair operation as technical evaluation
indices for surmounting a step.
2.2.1 Tilt of Wheelchair when Lifting Front
Wheels
When climbing over a step, the tilt angle of the
wheelchair relative to the ground (the shaded area in
Figure 1) reaches its maximum when the front wheels
are lifted. This angle is measured by a level sensor
attached to the side of the wheelchair.
Figure 1: Wheelchair tilt and sensor.
2.2.2 Vibration Level during Wheelchair
Operation
The vibration level is an index to evaluate the effects
of vibration on the human body. The vibration level
is calculated by obtaining the frequency-weighted
acceleration run-time value of the measured
acceleration with vibration sensory correction (Figure
HEALTHINF 2023 - 16th International Conference on Health Informatics
498
2), as defined in JIS C 1510 (Japanese Standards
Association, 1997).
The frequency-weighted acceleration run-time
value (a
w
) is obtained using the following equation,
where the vibration acceleration run for the frequency
i Hz component is a(i) and the relative response at
frequency i Hz is C
n
(i).
𝑎
𝛴
𝑎
𝑖
10
⁄
(1)
The vibration acceleration running value a(i) is
obtained using the following equation, where G(i) is
the power spectrum G(i) of the components of the
fundamental frequency Δf and frequency i Hz of the
frequency analysis of the vibration acceleration
response.
𝑎
𝑖
𝛥𝑓𝑥𝐺
𝑖
(2)
By substituting equation (2) into equation (1), we
obtain equation (3).
𝑎
𝛴
𝛥𝑓𝑥𝐺
𝑖
10
⁄
(3)
As a result, vibration level (4) is obtainable using
the following equation.
𝐿
20𝑙𝑜𝑔
𝑎
𝑎
⁄
(4)
10log
𝛴
𝛥𝑓𝑥𝐺
𝑖
10
/𝑎
Figure 2: Human body vibration sensory compensation.
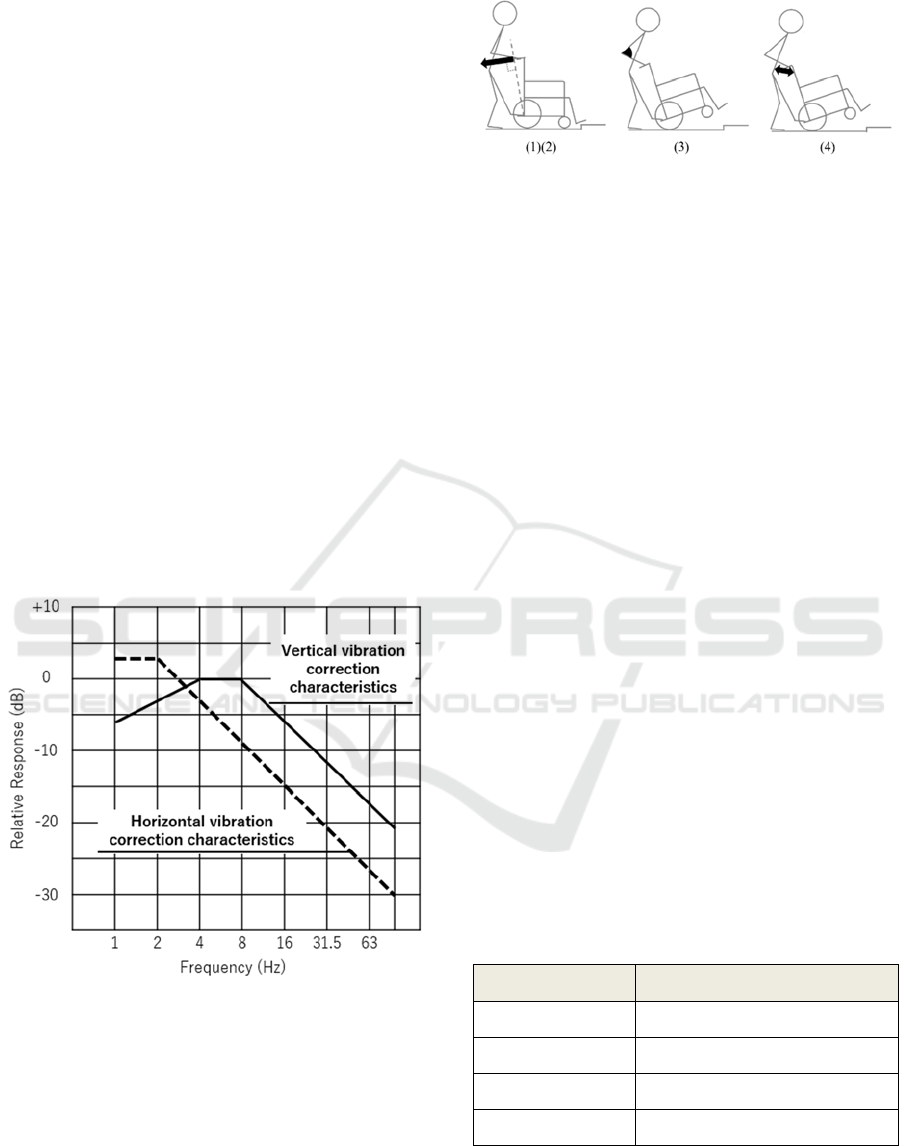
2.3 Technical Instruction
Teaching is performed by providing the learner with
information (challenging points and advice) inferred
from values of the evaluation indices. The teaching
information for the wheelchair step climbing
operation is based on the appropriate operating
posture (Figure 3) as identified by Noto et al. (2016).
Figure 3: Operating posture when wheelchair climbs over
steps.
(1) Apply force to the grip in a perpendicular
direction to the line connecting the tipping lever
and the grip.
(2) Do not apply force only to the legs, but press
down the grip obliquely downward and
backward simultaneously.
(3) Maintain a moderate elbow angle.
(4) Maintain an appropriate distance between the
caregiver's trunk and the wheelchair.
Failure to maintain the operating posture above will
impose a physical burden on the caregiver and also
affect the comfort level of the wheelchair user.
3 EDUCATION SYSTEM
We configured the system based on the requirements
of the functions necessary for teaching wheelchair
technology described in the previous section. From
the viewpoint of ease of learning, we use the sensor
built into the iPhone, which does not require any
special equipment. Although the technical
specifications of the iPhone sensor are not disclosed,
some previous studies (Noto et al., 2016; Sawada et
al., 2007) have used the iPhone sensor as a substitute
for existing sensors. Table 1 lists technologies used in
the development of the proposed system, and Figure
4 provides an overview. The proposed system has
three functions.
Table 1: Technologies used for system development.
Item Technology
Frontend Vue.js
Backend Node.js, Python
DB MySQL
PaaS Heroku
Development of Learning System to Support for Passing Steps of Wheelchair
499

Figure 4: System overview.
3.1 Measurement Functions
After placing the device on the wheelchair, the
measurement starts by clicking the start button.
During the measurement, triaxial acceleration and
angle data are recorded every 0.1s. This process
continues until the button is clicked again. The data
are sent to the server after measurement completion.
Figure 5: Measurement function interface.
3.2 Evaluation Functions
The vibration level and maximum angle are
calculated from the data sent in 3.1.1 according to the
technical evaluation method described in 2.2. Results
are stored in the database and are displayed on the
client side. Difference between data of the learner and
data of skilled persons of similar physique are also
displayed to assist learners in quantitatively
understanding their own techniques.
Figure 6: Evaluation function interface.
3.3 Teaching Functions
Return feedback to the learner based on 3.1.2&2.3.
Feedback information is provided to the learner based
on the assumed technical tasks according to
differences between the learner's data and the expert's
data. Table 2 presents examples of the assumed tasks
and the feedback information for the learner to take
appropriate operating postures.
Figure 7: Teaching function interface.
4 CONCLUSIONS
When learning how to assist a patient without a
nearby instructor, learners were forced to learn by
themselves through video and text-based materials.
Therefore, learners had to judge their proficiency
level subjectively. It was difficult for them to assess
HEALTHINF 2023 - 16th International Conference on Health Informatics
500

Table 2: Examples of Feedback Information.
Assumed issue
Feedback for proper
operating posture
Lifting the front wheel
too much.
• Gently pull the grip.
• Reduce elbow angle.
Insufficient height to lift
the front wheels, hitting
a step.
• Increase elbow angle.
• When lifting the front
wheel, pull the grip
b
ackward at an an
g
le.
Distance between the
body and the wheelchair
is too much.
• Approach and operate
the wheelchair.
their own skills quantitatively. By contrast, the
educational system proposed in this study measures
and presents the learner's proficiency level
quantitatively. Moreover, it enables immediate
feedback according to their level of proficiency,
which can be expected to engender more efficient
learning. In future studies, we would like to verify the
usefulness of our system by comparing the learning
effects of the proposed educational system with those
of conventional video-based and text-based teaching
methods.
ACKNOWLEDGEMENTS
This work was supported by JSPS KAKENHI Grant
Number 20H03971.
REFERENCES
Cabinet Office. (2018). White Paper on Aging Society FY.
Retrieved May 16, 2022, from https://www8.
cao.go.jp/kourei/whitepaper/w-2019/html/zenbun/s1_1
_1.html
Cabinet Office. (2008). White Paper on Aging Society.
Retrieved May 16, 2022, from https://www8.
cao.go.jp/kourei/whitepaper/w-2009/zenbun/pdf/1s1s_
1.pdf
Cabinet Office. (2017). 27th Social Security Working
Group Document. Retrieved November 11, 2022,
from https://www5.cao.go.jp/keizai-shimon/kaigi/
special/reform/wg1/301030/shiryou3-2-2.pdf.
Ministry of Health, Labour and Welfare. (2021). The
number of long-term care workers required based on
the eighth long-term care insurance business plan.
Retrieved November 11, 2022, from https://www.
mhlw.go.jp/content/12004000/000804129.pdf.
Huang, Z., Nagata, A., Kanai-Pak, M. et al (2014).
Automatic Evaluation of Trainee Nurses' Patient
Transfer Skills Using Multiple Kinect Sensors, IEICE
Transactions on Information and Systems, 97, 1, 107-
118.
Nakagawa, J., Qi, A., Ishikawa, I. et al. (2015). Proposal of
a Skill Teaching Service System in Bed Assistance
Operation Using a Sheet, Proceedings of the Third
National Conference of the Japan Society for Service
Research, 323-324.
Tanaka, A., Kunishima, M., Suzuki, C. et al. (2006).
Differences in the sense of wheelchair speed between
caregivers and passengers, Proceedings of the 41st
Annual Meeting of the Japanese Physical Therapy
Association, 559.
Yamada, I., Matsushima, N., Sakashita, Y. et al. (2004). A
Study on Anxiety Felt during Wheelchair Use,
Transactions of the Japan Society of Mechanical
Engineers, 70, 108-116.
Narisawa, S., Mizutani, M., Kurashima, S. et al. (2001).
Sensory characteristics of wheelchair-bound patients
when passing through steps: Through analysis of
sensory testing of abdominal surgery patients,
Proceedings of the Annual Meeting of the Japanese
Society of Nursing Science, 21, 226.
Noto, Y., & Muraki, S. (2016). Postural index of wheelchair
step climbing assistance operation considering care
burden and riding comfort, Journal of the Japanese
Society of Nursing Technology, 15(2), 135-145.
Sawada, T., Kojima, Y., Kondo, T. et al. (2007). A Study
on Wheelchair Operation and Ride Comfort
Considering Step Riding Over, Bulletin of Tomakomai
National College of Technology, 42, 40-73.
Japanese Standards Association. (1997). JIS C 1510
Vibration Level Meter.
Development of Learning System to Support for Passing Steps of Wheelchair
501
