
A Robust Adaptive Workload Orchestration in Pure Edge Computing
Zahra Safavifar
1 a
, Charafeddine Mechalikh
2 b
and Fatemeh Golpayegani
1 c
1
University College Dublin, School of Computer Science, Ireland
2
Laboratory of Artificial Intelligence and Information Technology (LINATI), University Kasdi Merbah, Ouargla, Algeria
Keywords:
Workload Orchestration, Reinforcement Learning, Pure Edge Computing, Adaptive Model, Robust Model.
Abstract:
Pure Edge computing (PEC) aims to bring cloud applications and services to the edge of the network to sup-
port the growing user demand for time-sensitive applications and data-driven computing. However, mobility
and limited computational capacity of edge devices pose challenges in supporting some urgent and computa-
tionally intensive tasks with strict response time demands. If the execution results of these tasks exceed the
deadline, they become worthless and can cause severe safety issues. Therefore, it is essential to ensure that
edge nodes complete as many latency-sensitive tasks as possible.
In this paper, we propose a Robust Adaptive Workload Orchestration (R-AdWOrch) model to minimize dead-
line misses and data loss by using priority definition and a reallocation strategy. The results show that R-
AdWOrch can minimize deadline misses of urgent tasks while minimizing the data loss of lower priority tasks
under all conditions.
1 INTRODUCTION
The rapid increase in actively connected Internet of
Things (IoT) devices and their applications create
massive data at the network’s edge. A recent report
estimates that connected devices will reach 38 billion
by 2025 (Analytics, 2019). The affordability and ex-
pansion of these devices have given rise to many IoT
applications including but not limited to connected
vehicles, smart cities, healthcare, security, surveil-
lance, and traffic monitoring. ”Data Age” estimates
that 175 zettabytes of data will be generated every
year by 2025 of which 30% will need real-time pro-
cessing (Rao, 2021). While the cloud has huge re-
sources, it suffers from increased latency, inconsistent
connectivity, and a lack of real-time responsiveness.
As a response, a new paradigm of Edge Computing
has been introduced which involves the deployment
of servers (or small-scale data centers) near the edge
of the network. Increasing the number of such servers
by increasing the data produced at the edge is not a so-
lution. We need to shift toward Pure Edge Computing
(PEC) to minimize the use of high-capacity servers
and take advantage of currently available resources at
the edge devices. However, edge devices mobility and
a
https://orcid.org/0000-0001-8531-5068
b
https://orcid.org/0000-0003-2811-9903
c
https://orcid.org/0000-0002-3712-6550
their limited resources and energy may lead to the sit-
uation that available edge devices in the area cannot
support all user’s demands and increase failure.
IoT applications can involve private data, require
minimal latency, or produce a considerable volume
of data while requiring fast execution. The failure to
meet a critical deadline can lead to fatalities and sig-
nificant losses (Uddin et al., 2021; Dai et al., 2019;
Khan, 2016). This highlights the importance of re-
source management and scheduling in edge comput-
ing where a mix of requests with various Service
Level Agreements (SLA) and deadlines should be
managed with resource-constraint devices. The liter-
ature proposes different approaches to accommodate
tasks with varying time sensitivity in Edge Comput-
ing. However, some dynamicity of the real-world
environment is ignored for the sake of simplifying
the problem. These simplifications include homo-
geneity of computing nodes and tasks (Dai et al.,
2019; Sharif et al., 2022), neglecting bandwidth fluc-
tuation and its impact on delay (Sharif et al., 2022;
Fadahunsi et al., 2021; Dai et al., 2019), and disre-
garding the mobility of devices (Sharif et al., 2022;
Dai et al., 2019; Xu et al., 2020; Lee and Park, 2021;
Fadahunsi et al., 2021; Azizi et al., 2022). Moreover,
some of them assume simultaneous batch arrival of
resource requests or formulate the problem as an of-
fline scheduling problem by assuming a prior knowl-
Safavifar, Z., Mechalikh, C. and Golpayegani, F.
A Robust Adaptive Workload Orchestration in Pure Edge Computing.
DOI: 10.5220/0011782500003393
In Proceedings of the 15th International Conference on Agents and Artificial Intelligence (ICAART 2023) - Volume 2, pages 325-333
ISBN: 978-989-758-623-1; ISSN: 2184-433X
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
325

edge of task arrival times (Dai et al., 2019; Sharif
et al., 2022). Fault tolerance is another concern in cur-
rent distributed platforms where mission-critical IoT
applications are involved, and the target edge node
cannot function for any reason. Given the real-time
nature of IoT applications, not handling such failures
can cause a disaster.
Currently, edge computing hosts a variety of IoT
applications of which healthcare is attracting the at-
tention of both researchers and industry players. Edge
computing is being used to improve services in the
healthcare domain. Since data in these platforms is
related to human health safety, it can be very sensi-
tive to latency and network dynamics (e.g., changes in
available bandwidth) (Wang et al., 2017). Pure Edge
Computing, by taking advantage of available nearby
devices as a computational resource, supports low la-
tency services, which makes it a suitable option for
deploying healthcare platforms.
This paper applies workload orchestration in the
healthcare platforms of a nursing home, where elderly
people with varying health conditions are taken care
of by monitoring and analyzing their health signals.
This platform is facilitated by Pure Edge Computing
where there are heterogeneous mobile and stationery
edge devices such as smartphones, computers, wear-
ables, sensors, etc., and a private Edge server in the
area. As the generated tasks vary in urgency and pri-
ority, various Hard-Real-Time (HRT) tasks such as
monitoring vital signals of bedridden patients, Soft-
Real-Time (SRT) tasks such as processing camera
data, and Non-Real-Time (NRT) tasks such as histori-
cal data gathering are generated and must be handled.
Since healthcare applications are highly sensitive, and
because the PEC environment is highly unpredictable
and dynamic, a robust model is needed that can handle
the workload in different conditions, including emer-
gencies. It should be able to handle an environment
that is sparse with a few devices, or when there are
high loads of devices and requests.
This paper proposes a Robust Adaptive Workload
Orchestration (R-AdWOrch) that is designed based
on AdWOrch (Safavifar et al., 2021), which uses
Reinforcement Learning for workload orchestration.
The R-AdWOrch is able to function in various ran-
dom dynamics in the PEC. The goal is to minimize the
missing deadline of SRT tasks while meeting nearly
all HRT tasks in any condition, specifically in sparse
or crowded areas, by using a priority definition and a
reallocation strategy. Our contributions to this paper
are as follows:
• Designing a reallocation strategy that prevents
task failure when there are no available resources
or the resource cannot execute the assigned task
for any reason.
• Prioritizing execution of HRT tasks over other
types.
• Reshaping the reward function to minimize the
delay for HRT and SRT tasks.
The remainder of this paper is organized as fol-
lows, the PEC, Real-Time system, and AdWOrch are
over-viewed in Section 2. The problem and environ-
ment characteristics are described in Section 3. Task
offloading process using R-AdWOrch is presented in
Section 4. Section 5 evaluates the proposed model
through extensive simulations. Finally, Section 6 con-
cludes by giving an outline of the future directions of
this work.
2 BACKGROUND
2.1 Pure Edge Computing
Pure Edge Computing takes place at the bottom layer
of the network architecture. It aims to improve the
system’s performance by taking advantage of avail-
able resources at the edge of the network. Based on a
study conducted by Carnegie Mellon University, com-
puting at the extreme edge is more energy and latency
efficient than computing in the distant cloud for cer-
tain applications (Drolia et al., 2013). However, PEC
is a highly decentralized and dynamic network of het-
erogeneous and resource-constrained devices that can
be mobile or stationary, which produce unpredictable
and fluctuating workloads. IoT applications vary and
are requested at different time sensitivity. Therefore,
such an environment requires an orchestrator that can
adapt to different situations and dynamics.
2.2 Real-Time and Non-Real-Time
Systems
A real-time system is one whose basic specification
and design correctness arguments must include its
ability to meet its timing constraints (Kim and Son,
1995). In contrast, non-real-time systems have no
strict deadlines, and their tasks can be failed and re-
peated if they are not complete. Three levels of time
sensitivity systems and tasks are defined:
Hard-Real-Time (HRT), tasks have firm dead-
lines. Failure to meet these deadlines can cause se-
vere damage to the system or its environment, includ-
ing injury or even death. Aviation control, fire alarm
system, and some subsystem of the health care system
are instances of hard real-time systems.
ICAART 2023 - 15th International Conference on Agents and Artificial Intelligence
326
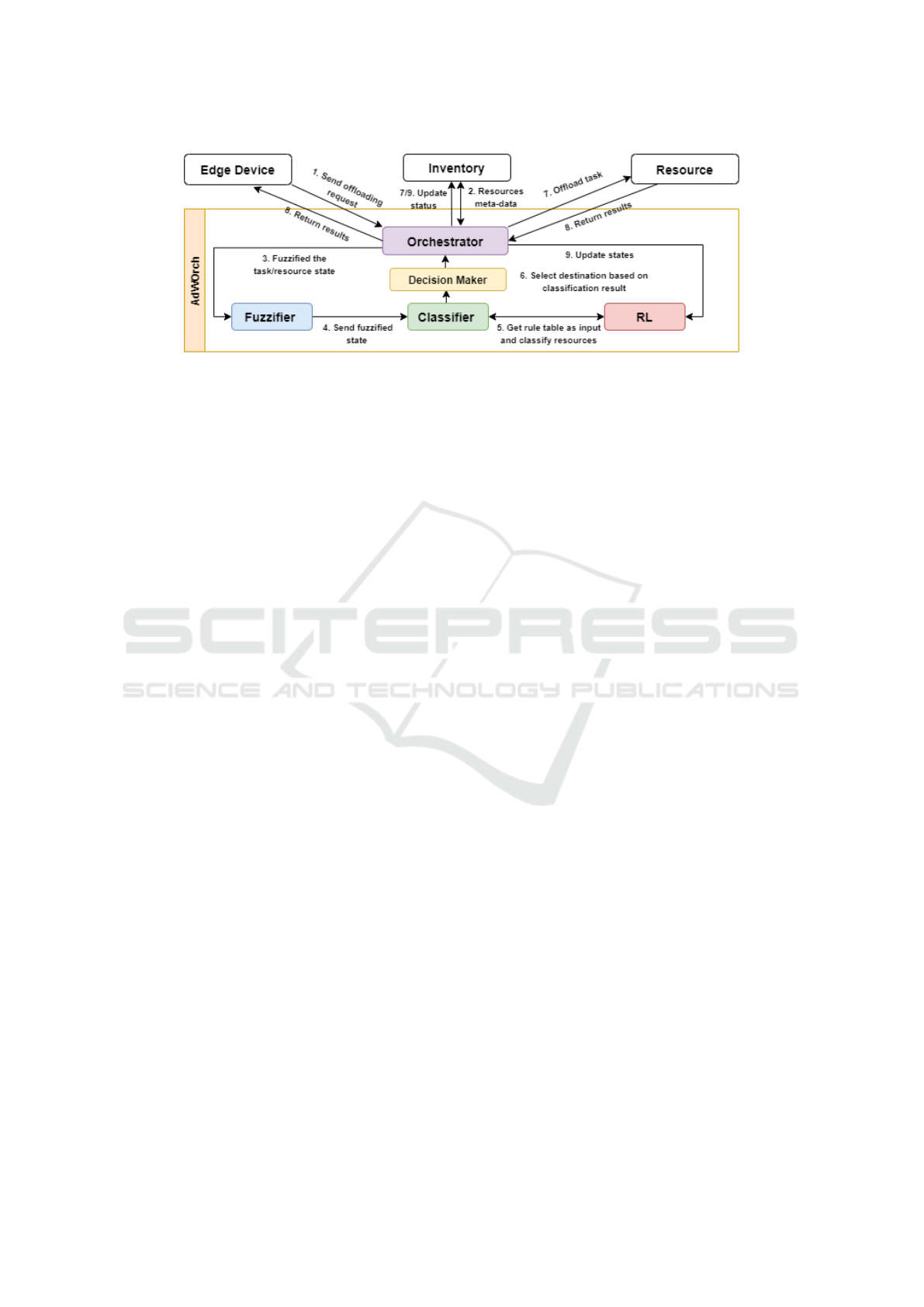
Figure 1: AdWOrch Components and task offloading flow.
Soft-Real-Time (SRT), tasks have soft/flexible
deadlines in which delays or failure in execution lead
to downgrading the Quality of Service. Video stream-
ing and online gaming are two examples of soft real-
time systems.
Non-Real-Time (NRT), tasks do not have re-
stricted deadlines, and the system can tolerate the fail-
ure of such tasks. Data collection for some appli-
cations, such as weather prediction and road mainte-
nance, can be categorized as non-real-time systems.
Real-world smart platforms usually contain a mix-
ture of different types of tasks which should be man-
aged based on priority.
2.3 AdWOrch
The Adaptive Workload Orchestration (AdWOrch)
model is developed based on the Fuzzy Decision
Tree (FDT) algorithm proposed in (Mechalikh et al.,
2020a).The base task orchestration algorithmis com-
plemented by a new resource selection strategy and
reward function.
Figure 1 shows the AdWOrch process and com-
ponents. First, the edge device sends an offloading
request to the central orchestrator. The orchestrator
gets all nearby resources’ characteristics from the in-
ventory and creates a state observation from the tasks’
attributes and resources’ characteristics and sends it
to the fuzzifier. After the fuzzification phase, the re-
sources are classified to estimate how much each re-
source is reliable for offloading the task using a de-
cision tree. A decision tree is created using the Q-
table that arises from the RL component. Then the
decision-maker selects a nearby device with sufficient
reliability. After offloading the tasks to the destina-
tion, resource status in the inventory is updated si-
multaneously. The result is sent to the orchestrator,
which in turn sends it to the corresponding device. In
addition, when the result is returned, the device’s re-
source status in the inventory is updated again and the
task execution result is sent back to the RL compo-
nent. Finally, the RL component updates the Q-table
based on the received results by the reward function.
3 PROBLEM STATEMENT
This study aims to propose a robust and adaptive
workload orchestration model to minimize missed
soft real-time deadlines while meeting almost all hard
real-time deadlines and minimizing data loss due to
mobility or any other reasons to fail (i.e., insufficient
resources, no available resources, and dead devices)
in a PEC environment.
The PEC environment is where resource-
constrained devices should accommodate a mix
of various tasks with different urgency levels and
SLA. Also, devices are heterogeneous, and both end
devices and resources can be stationary or mobile.
Mobile devices are able to enter and leave the area or
move within it effortlessly. Battery-powered devices
differ in their remaining battery level and locations.
3.1 Parameter Modelling
A centralized powerful RL-based orchestrator entity
allocates or reallocates tasks to the available resources
by considering the type of the tasks (i.e., HRT, SRT,
NRT) to minimize the delay and failure in the sys-
tems.
We proposed two tiers architecture in which edge
devices and sensors at the first layer generate the
tasks and are utilized as the primary computational
resources. While for managing emergent conditions
in which devices at the edge cannot satisfy the re-
quirements of the user request, the Edge servers at
the second layer will facilitate the required resources
for HRT and SRT tasks. In this paper, the state, ac-
tion, and reward for the RL algorithm are defined as
follows:
• State Representation. In AdWOrch, the state is
A Robust Adaptive Workload Orchestration in Pure Edge Computing
327

represented by two feature sets, tasks’ attributes
and resources’ characteristics at timestamp t. A
task’s attributes include latency, size, generator
mobility, and task type. Resources’ characteris-
tics include CPU utilization, CPU MIPS, mobility
behavior, and remaining battery. To improve the
learning process, instead of CPU utilization, we
consider the current load on the device, d
l
, which
is calculated by the queue length of tasks waiting
for execution on the device, d
ql
, divided by the
number of device CPU cores, d
cc
. See Equation.
1.
d
l
= d
ql
/d
cc
(1)
Instead of device capacity that was the MIPS size
and task size, the expected execution time, e
t
,is
considered which is calculated by the task size, t
s
,
divided by the MIPS size, d
m
. See Equation. 2.
e
t
= t
s
/d
m
(2)
• Action Space. The action space A = {0,1} is
the set of all possible resource selection strategies
(i.e., indicating a specific resource that has been
selected for the task).
• Reward. The immediate reward the orchestrator
gets from the environment at a time step t after
taking action a is the success or failure status of
the task, which is represented as 1 or 0, respec-
tively.
4 MODEL DESIGN
A Robust Adaptive Workload Orchestration (R-
AdWOrch) model is proposed based on AdWOrch
model (Safavifar et al., 2021). It aims to achieve ro-
bustness along with adaptability in random and dy-
namic PEC environments which can accommodate
resource constraints in crowded or sparse areas. R-
AdWOrch introduces a central orchestrator that em-
ploys an RL-based algorithm that aims to minimize
the missing deadline for SRT tasks and meet nearly
all HRT tasks. Hence, it should handle different types
of task failure. There are five types of failure in the
system:
• Failure Due to Missing The Deadline: a task
cannot be completed before its deadline.
• Failure Due to Mobility: mobile devices can join
or leave the area effortlessly and not be able to
access one another to return the result during the
offloading process.
• Failure Due to Incompatible Hard-
ware/Software: various devices in the area
Figure 2: Task offloading process by R-AdWOrch.
have different hardware and software scopes.
Since tasks have different requirements in terms
of hardware and software, sometimes the allo-
cated device scope might not be compatible with
the task requirements. It causes the task to fail
due to insufficient resources.
• Failure Due to no Available Resources: In the
PEC environment, a device might be isolated and
cannot find nearby devices to offload a task. So,
the task fails due to no available resources.
• Failure Due to a Dead Device: When a battery-
operated device runs out of energy and cannot ex-
ecutes offloaded tasks.
Figure 2 demonstrates how R-AdWOrch manages
different types of tasks (i.e., HRT, SRT, NRT) to min-
imize task failure for the above failure reasons. The
R-AdWOrch has added red components to AdWOrch.
When R-AdWOrch receives a task, it tries to find a
proper resource from surrounding devices using the
AdWOrch orchestrator. If a proper resource is found,
ICAART 2023 - 15th International Conference on Agents and Artificial Intelligence
328
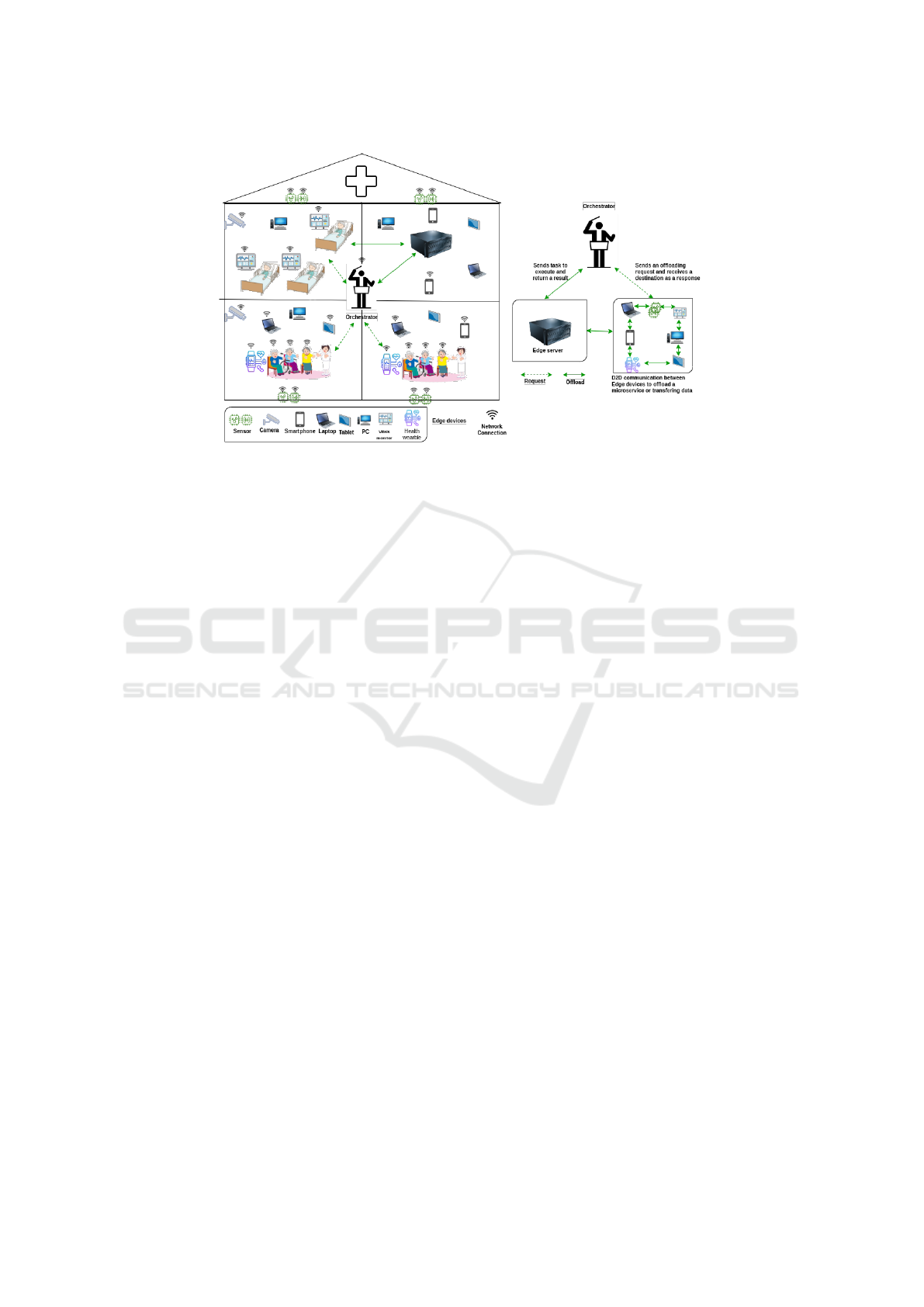
Figure 3: Health care platform in a PEC environment.
the task will be sent to the resource. In the case of
no accessible resources, there are two possibilities:
when the task is an NRT task, it will fail immediately
due to the ”no available resources”. Otherwise, if it
is an HRT or SRT task, it will be sent to the Edge
server directly to prevent failure due to ”No avail-
able resources”. The R-AdWOrch ignores all NRT
tasks in this step for two reasons. i) When a disaster
happens, there are a few resources and limited band-
widths which should be mainly utilized for executing
Real-Time tasks. ii) If the Edge server and bandwidth
are overloaded with NRT tasks, it might lead to long
response time and therefore the failure of the HRT
task.
When an offloading destination is selected, the
task is offloaded to that device for execution. If it is
an HRT task, it will be a high priority to execute be-
fore all SRT and NRT tasks. Hence, it decreases the
chance of HRT tasks failure due to ”missing dead-
line”. Since a preemptive system is considered, the
NRT task execution is paused and returned back to
the queue to allow arrived HRT task to be executed
immediately. NRT and SRT tasks should wait in the
device queue for execution. After execution, the re-
sult returns to calculate the new q-value and update
the q-table (see 4.1). When a failed result is returned,
if the task is an SRT and failed for other reasons than
latency, such as incompatible hardware/software, mo-
bility, and dead device, it will be reallocated to the
Edge server to be completed before the deadline. Fi-
nally, the result returns after execution at the Edge
server.
Also, to avoid failure due to the dead device, all
SRT and NRT tasks will be reallocated when the bat-
tery level drops below a given threshold. Current HRT
tasks will still be executed but the orchestrator will
prevent offloading future tasks to this device (see Al-
gorithm 1).
4.1 Reward Function
Our goal is to minimize the SRT task failure rate while
meeting nearly all HRT deadlines. The AdWorch
(Safavifar et al., 2021) defined a delayed penalty in
the reward function to minimize the failure due to
missing a deadline. This work adds more penalties
for HRT and SRT task failure as is shown in Equ. 3.
R(s,a) = R
s
− (w ∗ D
p
) (3)
D
p
= T
d
/T
l
(4)
R
s
is the task’s execution result, which is in the
set of {0, 1}to indicate success or failure. The delay
penalty D
p
is calculated by dividing the delay time
T
d
by the task latency time T
l
(see Equation 4). The
D
p
value can exceed 1 but this rarely occurs. w is the
weight of the penalty which for the HRT task is 3, for
the SRT task is 1.5 and for the NRT tasks is 1.
5 PERFORMANCE EVALUATION
5.1 Simulation Settings
To evaluate the performance of R-AdWOrch in a pure
edge environment we use PureEdgeSim (Mechalikh
et al., 2020b). We simulate a smart nursing home
where senior citizens with different health conditions
live. Some are bedridden, while others are in bet-
ter condition and can move around and do everyday
tasks. Various healthcare sensors collect different vi-
tals and send the data for analysis and diagnosis. The
A Robust Adaptive Workload Orchestration in Pure Edge Computing
329

while running do
if offloading request (task,device) then
if remaining energy(device) < threshold then
if task ̸= HRT then
reallocate(task,INSUFFICIENT POWER);
/*reallocate due to insufficient power*/
else
addToExecutionQueue(t);
end
end
end
end
Algorithm 1: Tasks reallocation for low battery edge de-
vices.
urgency of data differs; for example, the vitals of
a critically ill patient has a very high priority com-
pared with those of a healthy individual. In addition
to health sensors, other devices such as cameras are
used to record people’s apparent activities, and some
sensors collect historical data from the equipment and
environment. The characteristics of these devices are
summarized in Table 1.
An emergency in the mentioned smart nursing
home can happen when a telecommunication incident
happens. Half of the edge devices are disconnected
from the main network while still having access to
the internal network. Also, when for any reason the
number of people is increased, the system faces a high
workload. (see Table 3). A private Edge server is
in the area, and devices can communicate with it via
the main network. This server will have a comput-
ing capacity of 400 GIPS (Giga Instruction Per Sec-
ond). Monitoring vital signs of critically ill patients
are HRT tasks, while analyzing vitals from healthy in-
dividuals and processing camera data are SRT tasks.
The tasks of gathering historical data are considered
as NRT (see Table 2). There is a central orchestra-
tor that all devices can access via the internal network
and accesses the main network and the Edge server.
To evaluate the performance of the proposed
model, the results are compared to AdWOrch (Safav-
ifar et al., 2021). For each of the explained scenarios,
a simulation of 30 minutes is run 5 times.
5.2 Evaluation Metrics
We define two evaluation metrics. The task success
rate for each task type is calculated by the number of
successful tasks divided by the total number of gen-
erated tasks. The average delay time for each type
of task is calculated by dividing the total delay time
by the number of generated tasks. The total delay
time is calculated by summing up the total network
time, total execution time, and total waiting time. Fur-
thermore, we assessed how effective the reallocation
strategy is by calculating how many tasks are reallo-
cated due to low battery power, mobility, and incom-
patible resources.
5.3 Results and Discussion
Average Delay. Figure 4(a-c) shows the average de-
lay for each type of task under different workloads.
As can be seen, R-AdWOrch significantly minimizes
the delay of HRT tasks compared to the baseline when
the density of devices is low (i.e., 50 devices) while
providing comparable results in all other cases. One
of the reasons for the reduction of the delay is the ex-
tra penalty that we defined in the reward function for
HRT and SRT task failure. The RL component re-
ceives a heavily weighted penalty when an HRT task
is not completed within the expected time interval.
Moreover, HRT tasks are prioritized over non-HRT
in two ways: i) the HRT tasks will add to the front
of the queue; ii) when an HRT task arrives, if no free
computational resource is available, executing NRT
tasks are paused and resources are allocated to HRT
tasks. These allow fast execution even in resource-
constrained scenarios.
Success Rate. Figure 4d shows that R-AdWOrch
increases the success rate of HRT tasks compared to
the baseline. The reason is R-AdWOrch applies two
levels of prioritization to prevent HRT tasks from fail-
ing: i) by reassigning non-HRT tasks to other de-
vices when the remaining battery power is not enough
for executing all its remaining tasks; ii) as mentioned
in section 4.1, the delay penalty for the HRT tasks
is multiplied by 3 which causes the algorithm to be
more sensitive to HRT failures compared with SRT
and NRT tasks. Moreover, as can be seen in Figure
4e R-AdWOrch success rate for SRT tasks is signif-
icantly higher than the baseline. The main reason is
the allocation strategy that applies to SRT tasks when
they fail due to reasons other than latency. By reallo-
cating these tasks to the edge server, they can meet the
deadline and succeed. Figure 4f shows the NRT tasks
baseline outperforms the R-AdWOrch which is rea-
sonable because i) in R-AdWOrch due to the nature
of NRT tasks they have lower priority for execution;
ii) they do not send to the edge server when no nearby
edge devices are available for assigning and they will
be failed.
Figure 5 depicts the contribution of each of
the proposed methods (i.e., priority, reallocation,
SRT/HRT delay penalty, and edge server) in improv-
ing the task success rate. In emergency scenarios,
AdWOrch accounts for only 40% of the success rate
while the other 60% comes from R-AdWOrch im-
proving methods.
ICAART 2023 - 15th International Conference on Agents and Artificial Intelligence
330

Table 1: Types of edge devices.
Types Laptops Smartphones Gateways Stationary sensors Mobile sensors
Generate tasks No Yes No Yes Yes
Ratio (%) 11 18 11 28 32
Mobility No Yes No No Yes
Speed (m/s) - 1.4 - - 1.4
Battery-powered Yes Yes No No Yes
Battery-capacity(Wh) 56.2 18.75 - - -
Idle energy consumption (W) 1.7 0.2 3.8 - -
Max energy consumption (W) 23.6 5 5.5 - -
CPU (GIPS) 110 25 16 - -
CPU cores 8 8 4 - -
(a) Average HRT delay (b) Average SRT delay (c) Average NRT delay
(d) HRT success rate (e) SRT success rate (f) NRT success rate
Figure 4: The simulation results for different scenarios.
Table 2: The types of applications.
Application types Latency(ms) Size (MI)
HRT 15 200
SRT 500 5000
NRT 30000 10000
Table 3: Scenarios profile.
Number of devices HRT
a
SRT
a
NRT
a
50 135 135 270
100 135 135 270
300 135 135 270
a
Requested task for each device per minute.
Reallocation: Figure 6 gives the number of real-
located SRT tasks and their reallocation reasons. As
mentioned above, R-AdWOrch reallocates SRT tasks
for two reasons: i) to avoid data loss when an SRT
task is failed due to ”mobility” or ”incompatible hard-
Figure 5: The contribution of R-AdWOrch methods in the
success rate.
ware/software”; ii) to prevent task failure resulting
from a battery-powered device dead.
A Robust Adaptive Workload Orchestration in Pure Edge Computing
331

Figure 6: The contribution of reallocation reasons.
6 CONCLUSIONS
By considering the real-world characteristics of the
PEC, explained above, this paper proposed a Robust
Adaptive Workload Orchestration (R-AdWOrch) in a
PEC environment that can function in different situ-
ations and circumstances. It aims to meet nearly all
HRT tasks while minimizing the deadline missing of
SRT tasks. We applied our model for a healthcare
application and compared it with the baseline model
(AdWOrch). The results show that R-AdWOrch out-
performs AdWOrch in HRT and SRT success rates
and decreases the delay time for these task types.
R-AdWOrch uses a centralized orchestrator which
might be a single point of failure and is a risk for a
robust model. Designing a distributed network of or-
chestrators is part of our future work. Moreover, the
orchestration of dependent tasks is another challenge
in this area.
ACKNOWLEDGEMENTS
This publication has emanated from research sup-
ported in part by a grant from Science Foundation
Ireland under Grant number 18/CRT/6183. For the
purpose of Open Access, the author has applied a CC
BY public copyright license to any Author Accepted
Manuscript version arising from this submission.
REFERENCES
Analytics, S. (2019). “internet of things now numbers 22
billion devices but where is the revenue”. https://news
.strategyanalytics.com/press-releases/press-release-d
etails/2019/Strategy-Analytics-Internet-of-Things-N
ow-Numbers-22-Billion-Devices-But-Where-Is-The
-Revenue/.
Azizi, S., Shojafar, M., Abawajy, J., and Buyya, R. (2022).
Deadline-aware and energy-efficient iot task schedul-
ing in fog computing systems: A semi-greedy ap-
proach. Journal of network and computer applica-
tions, 201:103333.
Dai, H., Zeng, X., Yu, Z., and Wang, T. (2019). A schedul-
ing algorithm for autonomous driving tasks on mobile
edge computing servers. Journal of Systems Architec-
ture, 94:14–23.
Drolia, U., Martins, R., Tan, J., Chheda, A., Sanghavi, M.,
Gandhi, R., and Narasimhan, P. (2013). The case for
mobile edge-clouds. In 2013 IEEE 10th International
Conference on Ubiquitous Intelligence and Comput-
ing and 2013 IEEE 10th International Conference on
Autonomic and Trusted Computing, pages 209–215.
IEEE.
Fadahunsi, O., Ma, Y., and Maheswaran, M. (2021). Edge
scheduling framework for real-time and non real-time
tasks. In Proceedings of the 36th Annual ACM Sym-
posium on Applied Computing, pages 719–728.
Khan, M. A. (2016). A survey of security issues for cloud
computing. Journal of network and computer appli-
cations, 71:11–29.
Kim, Y.-K. and Son, S. H. (1995). Predictability and con-
sistency in real-time database systems. Advances in
real-time systems, pages 509–531.
Lee, C. H. and Park, J. S. (2021). An sdn-based packet
scheduling scheme for transmitting emergency data
in mobile edge computing environments. Hum. Cent.
Comput. Inf. Sci, 11:28.
Mechalikh, C., Taktak, H., and Moussa, F. (2020a). A fuzzy
decision tree based tasks orchestration algorithm for
edge computing environments. In International Con-
ference on Advanced Information Networking and Ap-
plications, pages 193–203. Springer.
Mechalikh, C., Taktak, H., and Moussa, F. (2020b). Pureed-
gesim: A simulation framework for performance eval-
uation of cloud, edge and mist computing environ-
ments. Computer Science and Information Systems,
(00):42–42.
Rao, S. K. (2021). Data-driven business model innovation
for 6g. Journal of ICT Standardization, pages 405–
426.
Safavifar, Z., Ghanadbashi, S., and Golpayegani, F. (2021).
Adaptive workload orchestration in pure edge com-
puting: A reinforcement-learning model. In 2021
IEEE 33rd International Conference on Tools with Ar-
tificial Intelligence (ICTAI), pages 856–860. IEEE.
Sharif, Z., Jung, L. T., and Ayaz, M. (2022). Priority-based
resource allocation scheme for mobile edge comput-
ing. In 2022 2nd International Conference on Com-
puting and Information Technology (ICCIT), pages
138–143. IEEE.
Uddin, M., Ayaz, M., Mansour, A., Aggoune, e.-H. M.,
Sharif, Z., and Razzak, I. (2021). Cloud-connected
flying edge computing for smart agriculture. Peer-to-
Peer Networking and Applications, 14(6):3405–3415.
ICAART 2023 - 15th International Conference on Agents and Artificial Intelligence
332

Wang, H., Gong, J., Zhuang, Y., Shen, H., and Lach, J.
(2017). Healthedge: Task scheduling for edge com-
puting with health emergency and human behavior
consideration in smart homes. In 2017 IEEE Inter-
national Conference on Big Data (Big Data), pages
1213–1222. IEEE.
Xu, J., Hu, Z., and Zou, J. (2020). Computing offloading
and resource allocation algorithm based on game the-
ory for iot devices in mobile edge computing. Interna-
tional Journal of Innovative Computing, Information
and Control, 16(6):1895–1914.
A Robust Adaptive Workload Orchestration in Pure Edge Computing
333
