
Noise Robustness of Data-Driven Star Classification
Floyd Hepburn-Dickins
a
and Michael Edwards
b
Department of Computer Science, Swansea University, U.K.
Keywords:
Neural Networks, Star-Pattern Recognition, Data Generation.
Abstract:
Celestial navigation has fallen into the background in light of newer technologies such as global positioning
systems, but research into its core component, star pattern recognition, has remained an active area of study.
We examine these methods and the viability of a data-driven approach to detecting and recognising stars within
images taken from the Earth’s surface. We show that synthetic datasets, necessary due to a lack of labelled real
image datasets, are able to appropriately simulate the night sky from a terrestrial perspective and that such an
implementation can successfully perform star patter recognition in this domain. In this work we apply three
kinds of noise in a parametric fashion; positional noise, false star noise, and dropped star noise. Results show
that a pattern mining approach can accurately identify stars from night sky images and our results show the
impact of the above noise types on classifier performance.
1 INTRODUCTION
Star pattern recognition dates back to the ancient era,
used by a multitude of empires as part of naviga-
tion for exploration and trade. Polynesia, one of
the worlds largest nations at its time, was formed in
great part due to celestial navigation. This is achieved
through the use of guiding stars and constellations,
man-made groupings of stars easily picked out due
to them containing those brightest and most obvious
stars in the night sky. The advent of modern com-
puting has supplanted these methods through a host
of alternative navigation systems, most predominately
global positioning systems. There is still a call for
celestial navigation, most often with regard to space
borne vessels and attitude determination (Rijlaarsdam
et al., 2020; van Bezooijen, 1989). In recent years,
when considering a desire for greater redundancy in
navigational systems and the potential threats posed
towards global position systems from the vulnerabil-
ity of the satellites themselves to the possibility of
interference from third parties, celestial navigation
presents itself as a viable alternative.
At its core exist two primary problems, star de-
tection, that is to pinpoint prospective stars within an
image, and star recognition, the correct identification
of a given star. Whilst the former is a widely solved
issue (Stetson, 1987), the latter remains a point of ac-
tive research (Rijlaarsdam et al., 2020). The computer
age has brought with it a host of improvements on this
a
https://orcid.org/0000-0001-5943-0652
b
https://orcid.org/0000-0003-3367-969X
ancient art, moving from identifying defined constel-
lations and the stars within, to deriving more general
solutions applicable across the night sky.
Whilst the focus of modern research is more com-
monly applied towards spacecraft and attitude de-
termination, the techniques and methods used can
broadly still be applied to navigation from the Earth’s
surface as well. The first and foremost challenge is
essentially the same; any navigation requires the ac-
curate and timely pinpointing and recognition of the
stars at hand. In the past this would be achieved
slowly by consulting a nautical almanac and sextant.
Modern pattern recognition techniques can vastly im-
prove both the acquisition and identification and have
been shown to do so when applied to attitude determi-
nation, we further examine their efficacy on systems
grounded to the earths surface alongside the chal-
lenges that entails.
2 RELATED WORK
Despite fading into the background of navigation, star
identification and recognition has nonetheless seen
a steady evolution of research over the decades. In
(Liebe, 1993) they proposed a triangle method, form-
ing patterns based on the angular distances between a
triplet of stars, the spherical angles between them and
their magnitudes. By generating a database of these
geometric properties and the patterns they form they
are able to match prospective identifications against
them and thus identify a given star. The method is
176
Hepburn-Dickins, F. and Edwards, M.
Noise Robustness of Data-Driven Star Classification.
DOI: 10.5220/0011804000003411
In Proceedings of the 12th International Conference on Pattern Recognition Applications and Methods (ICPRAM 2023), pages 176-184
ISBN: 978-989-758-626-2; ISSN: 2184-4313
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
both rapid and accurate, but suffered limitations with
the introduction of false stars, a problem ever more
apparent due to the crowding of the celestial sphere
with satellites and other man-made objects that may
present themselves in an image. This was improved
upon in (Nabi et al., 2019) via their design of the star-
triplet database construction and feature extraction
methods resulting in a greater tolerance to missing
stars and improved ability in handling reduced num-
bers of stars present within the field of view (FOV).
There are a number of papers based around these
handcrafted properties between a guiding reference
star (GRS) and its guiding neighbour stars (GNS).
The work of (Mortari et al., 2004) utilised a pyramid
schema of four stars able to resist larger numbers of
false stars. The speed can then be increased via the
use of hash mapping with the pyramid method when
searching the space of available patterns (Wang et al.,
2018) .
The grid based algorithm (Padgett and Kreutz-
Delgado, 1997) utilises a primary star and its neigh-
bours within a specified radius to form a pattern vec-
tor, providing greater tolerance towards positional
noise. The modified grid algorithm (Na et al., 2009)
further increased position and magnitude tolerance.
Additional work here includes the use of radial and
cyclical feature patterns (Zhang et al., 2008) allow-
ing for rotation-invariant matching. With (Jiang et al.,
2015) improving upon the radial patterns and their po-
sitional tolerance via utilising a redundant-coded so-
lution.
Machine learning techniques in the work of (Xu
et al., 2019) have utilised these pattern generation
techniques through the lens of neural networks. This
allows for the use of machine learned patterns in lieu
of the handcrafted ones in prior literature, eliminat-
ing the need to search through any datasets for pattern
matching whilst (Yang et al., 2022) utilises a 1D con-
volutional neural network to achieve increases in both
speed and robustness towards various noise types.
Throughout this paper we examine the auto-
encoder and classifier outlined in (Xu et al., 2019) and
its performance when operating on simulated images
from the earths surface whilst parametrically explor-
ing the models tolerance to noise.
3 PROPOSED METHODOLOGY
3.1 Detection from Image
In order to recognise the stars they must first be de-
tected within an image. This involves accurately pin-
pointing the centre of a source, minimising the de-
tection of false sources and overcoming the varying
noise that may be present. To do this, we use an
implementation of the DAOFIND algorithm (Stetson,
1987) that searches an image for local density max-
ima with a peak amplitude exceeding a chosen thresh-
old and whose size and shape are similar to a defined
2D Gaussian kernel. Through this we can apply vari-
ous thresholds and parameters relating to the the size
and intensity of prospective sources in order to filter
relative to our domain and conditions. By subtracting
the median of our image prior to entering it into the
algorithm, we can reduce the impact of background
noise and light pollution, an issue that is much more
prevalent in our domain of ground-borne wide angle
sensors.
This allows for the accurate pinpointing of
prospective sources centroids, which can then be used
as the basis for the data our model will see. Whilst
some stars will inevitably be lost, some centroids may
be off by a small amount, and false stars will still filter
through and become included in our detected sources,
these are precisely the types of noise we hope to build
a tolerance to within our implementation.
3.2 Constellation Representation
Figure 1: Pipeline.
Moving from detected sources to a classification first
requires a learned representation of each star within
our catalogue. To do this we need to extract informa-
tion about the local features for each star. The exact
definition of what is local for a star depends on our
chosen parameters. We opt to utilise those stars clos-
est to a prospective GRS as they are more likely to be
captured together in an image.
When considering a given star and its neighbours,
the primary points of information we can utilise are
the brightness of the stars, and more critically, the lo-
cal topology of points, specifically the angular dis-
tances between them. By utilising the angular dis-
tances between the stars in a radial manner we are
able to make our learned representation invariant to
rotation and translation within the image. The angu-
lar distance will remain constant, across images and
time, forgiving the minor shifts in the stars them-
selves, thankfully this takes place over such a span
of time as to be negligible.
The night sky is rarely perfectly clear, showing us
just the stars as we want them. There is a great deal of
noise, from occlusion and light pollution to all manner
Noise Robustness of Data-Driven Star Classification
177

of satellites and astronomical phenomenon that may
be present across our view. Beyond that, the imag-
ing system itself can introduce errors or noise. To in-
crease the robustness of our classifier it needs to over-
come this noise, and as such we train our classifier
on a variety of simulated noisy conditions categorised
as positional noise, false star noise and dropped star
noise.
Positional noise occurs when the reported centroid
of the star is inaccurate, typically to the degree of a
pixel or so, as a result of centroid detection in un-
clear images. False star noise occurs when we detect
and attempt to both classify, and use in the classifi-
cation of other sources, false sources. Such sources
aren’t stars within our image and are typically borne
about through stellar artefacts or phenomenon such
as passing satellites, aircraft or meteorites. Dropped
star noise is where sources that should be present in
the image and used for classification are omitted, typ-
ically due to occlusion of part of the image from some
terrestrial artefact or weather conditions.
By introducing this noise into our training images,
we can imbue a tolerance towards it in our eventual
classifier. Such images can reduced into lists, D
sn
and D
nn
, detailing the distances between a GRS and
it’s nearby GNSs and the pair-wise distances between
GNSs respectively. The discretized outcome of these
lists, concatenated together to preserve identity be-
tween them, forms the input for our model, that which
is used to discern a star pattern or representation.
The parameters for the radius, from which we con-
sider GNSs, and discretization can be varied but in
keeping with the results from (Xu et al., 2019) and
experimental testing we use an input dimension of
400, derived form a radius p and discretization factor
e where p/e = 200. The model is trained by creating a
clean tensor and several noisy counterparts.
Clean tensors are formed utilising the Yale Bright
star catalogue (BSC), or a magnitude threshold-ed
version thereof, by choosing a star and retrieving all
neighbouring stars within p. Each star is represented
as a declination and right ascension and from these
values we can calculate D
sn
and D
nn
, and thus the in-
put tensor.
3.3 Constellation Recognition
Recognition refers to the final step, the determination
of precisely which star our input tensor refers to. The
star pattern generator maps from a potentially noisy
input to an approximation of the clean tensor for that
star. We then train a classifier to take these tensors
and learn the association between them and its classi-
fication, in our case its HR designation. For a given
vector we obtain a probability it belongs to each of
the stars in out catalogue, we then take the highest
probability result as our classification.
4 EXPERIMENTAL SETUP
4.1 Datasets
4.1.1 Training Data
In order to train the autoencoder we require a clean
constellation representation and multiple noisy vari-
ants. Clean representations are obtained using the
BSC, a catalogue of stars visible to the naked eye,
ranging up to a visible magnitude of 6.5. From this
we extract the HR number, DECJ200, RAJ2000, and
visible magnitude to form a simplified revised cata-
logue.
After selecting a candidate star from the BSC cat-
alog we identify those stars that fall within our cho-
sen radius p and generate the clean tensor input via
discretizing D
sn
and D
nn
. In order to create noisy
counterparts we utilise a data augmenter during the
training of the star pattern auto-encoder. This aug-
menter randomly applies a noise type and intensity to
the prospective star and its connected stars within p
before re-calculating and re-sorting the angular dis-
tances in order to generate D
sn
and D
nn
for this new
noisy variant. The structure of the data augmenter is
shown in figure 2.
Dropped star noise is created by randomly choos-
ing between 1 and a pre-determined maximum num-
ber from the neighbouring stars and removing them
from the set.
False star noise is created by applying a random
angular offset between 0
◦
and 360
◦
from the central
star, as well as a random separation offset between 0
◦
and the radius p to create a new star. The new stars
RA and DEC is then calculated as an offset from the
focal star.
Position noise chooses a random angular offset
from 0
◦
-360
◦
and a separation offset from 0
◦
−x ∗
radius where x is our chosen modifier for the max-
imum potential offset. Each star is then shifted ac-
cording to these values.
Once noise has been applied, angular distances
between stars are re-calculated and the list of near-
est neighbours re-sorted before discretiziation. Ulti-
mately this process allows for the stochastic genera-
tion of noisy counterparts for each stars clean tensor.
ICPRAM 2023 - 12th International Conference on Pattern Recognition Applications and Methods
178

Figure 2: Data augmenter.
4.1.2 Testing Data
In order to validate our approach we utilise the open
source software Stellarium to obtain synthetic images
of the night sky. Through this we can emulate a par-
ticular viewpoint and simulate the stars up to a desired
visible magnitude. We can furthermore include or re-
move any celestial artifacts, ambient light pollution
and satellites within the environment to garner clearer
or more realistic images.
For each synthetic image we extract the pixel co-
ordinates of each star alongside the catalogue infor-
mation from the BSC. This results in each image hav-
ing a corresponding CSV file detailing the metadata
for the viewpoint, j-date, camera origin and details for
each star.
For our testing we generated 11900 such images,
randomly sampling longitudinal and latitudinal points
across the Earth’s surface.
Figure 3: A synthetic image generated within Stellarium.
4.2 Implementation
Source detection is achieved utilising DAOStarFind
from the astropy library. Prior to performing the op-
eration on the image, we subtract the median value
from it in order to reduce background noise. This pro-
vides us with a list of sources typically exceeding the
actual number of stars present in the image, due to the
detection of satellites and other false stars.
In order to generate our model input we need to
be able to convert from pixel to angular distances. In
lieu of calibrating a camera we train a support vector
machine (SVM) to map from the pixel co-ordinates
of a star to its angular distance to the centre of the
image. We are able to train the SVM from the CSV
files generated alongside our synthetic images.
By imagining the centre of the image as being
right ascension 0 and declination 0 we can determine
a supposed RA/DEC of a particular star by calculating
it is an offset from this central point, calculating the
distance using our SVM. Whilst the RA/DEC is unre-
lated to its true RA/DEC, we can utilise these manu-
factured values alongside those of another star in the
same frame to calculate the angular distance between
them, which would be the same for their true right as-
cension and declination, thus allowing us to generate
our D
sn
and D
nn
lists.
The final model used to classify sources is built
from a star pattern generator and star pattern classi-
fier the structure of which is shown in figure 4. The
generator is the pre-trained auto-encoder created by
training on simulated images of a GRS and its nearby
GNSs. Each GRS has a clean pattern, borne from the
discretization of its angular distance to its GNSs and
the intra-GNS distances. Each clean pattern is aug-
mented using the data augmenter detailed above to
create noisy counterparts of varying intensity for each
of the noise types. In training an auto-encoder to de-
noise these noisy versions we are left with an encoder
capable of creating latent star-patterns for use in our
classifier.
Figure 4: Combined structure of the star pattern generator
and star pattern classifier.
Hyper-parameters were chosen from a mix of
those derived in (Xu et al., 2019), batch testing, and
practical considerations. When considered in the con-
Noise Robustness of Data-Driven Star Classification
179
text of navigation on the earths surface, achieved
without expensive imaging systems, we limit magni-
tude down to 3MV on a fish-eye lens. This allows for
the use of inexpensive cameras, using lower exposure
times whilst trying to capture as much information
as possible. The lower magnitude threshold is borne
from this need for minimal exposure times, to reduce
noise imparted through motion . We still adhere to
the input size arrived at within (Xu et al., 2019) of
200 derived from 2[p/e] as well as utilising 10 GNSs
per GRS, but due to fewer stars being present within
each image we need to expand the radius under which
stars are collected to achieve this. Testing found that
increasing this to 60
◦
allowed for the capture of the
10 GNSs necessitating an increase of the e factor to
0.3. The auto-encoder is trained first with a batch size
of 32 before fine tuning with a batch size of 512.
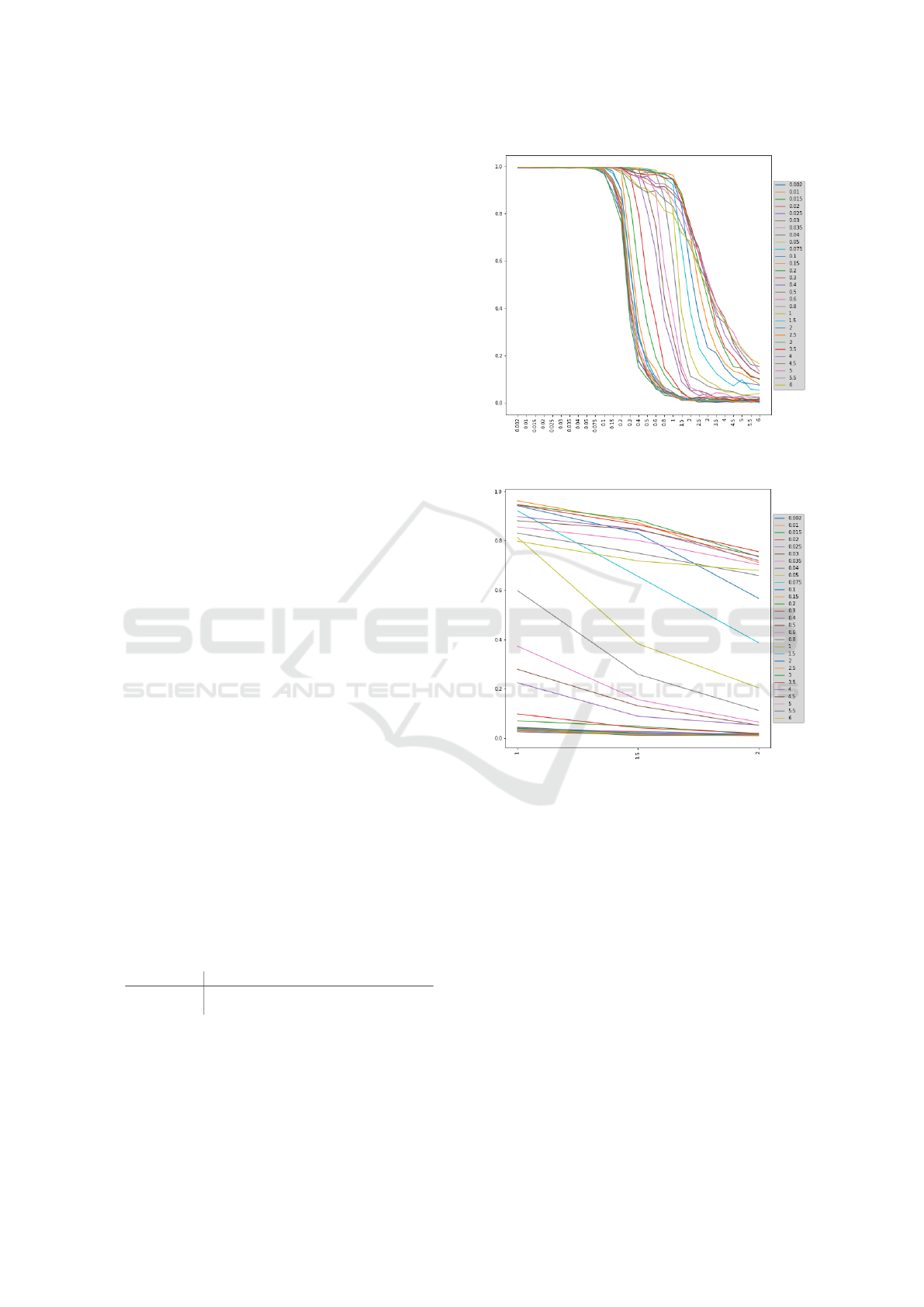
In order to maximise position noise tolerance with
these new imaging parameters we exhaustively tested
training the full model with differing levels of posi-
tion noise applied. From these we can choose the
model that is best able to handle the most position
noise. Training was done via randomly applying po-
sition noise up to a maximum value. This maximum
value was tested up to 6
◦
at which point the accuracy
suffered greatly. In evaluating position tolerance, the
generator was adjusted to generate results only at the
provided value opposed to a range up to that value,
and to only apply position noise rather than the other
types. We then evaluated each model at each position
value allowing us to see the trade-off between toler-
ance to position noise and accuracy. The first results
are visible in figure 5 and figure 6. The most appro-
priate model from these would be one trained on po-
sition noise up to 2.5
◦
and effective up to 1
◦
with an
accuracy of ∼ 96.2%. However by further examining
potential solutions within the optimal zone we aim to
improve on this preliminary model.
The early results show the best models exist where
they are trained to 2.5 to 3.5 but evaluated up to 1 to
1.5. Subsequently we search with greater granularity
within this space, erring to either side, for the opti-
mal model. This subsequent search parameters are
detailed in Table 1.
Table 1: Model Training Parameters.
Epochs Batch Size Early stopping
Autoencoder 4000 / 2000 32 / 512 No
Classifier 2000 512 Yes
Figure 7 shows the results of the more pinpointed
training under this regime.
Table 2 showcases the results from the further test-
ing to identify the optimal model, trading off toler-
ance towards pixel noise against accuracy, focused on
Noise Testing Value
Model Accuracy
Train
Value
Figure 5: Position noise and its impact on accuracy.
Noise Testing Value
Model Accuracy
Train
Value
Figure 6: Position noise and its impact on accuracy close
up.
due to it being the primary source of noise present
within our simulated images, particularly when con-
sidering the innate error generated when converting
from pixel to angular distances from the SVM. These
results were generated by evaluating the model at ex-
plicitly the stated test value for pixel noise, opposed
to a random distribution up to that value, as they were
trained.
The table shows the best model able to handle the
given test value of pixel noise. The desire is to choose
a model tolerant to as much position noise as possi-
ble, whilst still maintaining a high degree of accu-
racy. To this end, the model trained at 3.342
◦
but vi-
able up to 1.393
◦
is selected to move forward in our
testing. When evaluated across all noise types this
model scores an accuracy of 98.53% on 320000 sam-
ICPRAM 2023 - 12th International Conference on Pattern Recognition Applications and Methods
180

Noise Testing Value
Model Accuracy
Train
Value
Figure 7: Position noise and its impact on accuracy, further
testing.
Table 2: Showcasing the optimal model training value to
maximise accuracy on a given test value when considering
positional noise.
Optimal Training Max Test Value Accuracy
2.157 0.75 0.987
2.157 0.857 0.983
2.553 0.964 0.979
2.947 1.071 0.974
2.947 1.179 0.965
2.816 1.286 0.954
3.342 1.393 0.951
3.737 1.5 0.937
2.947 1.607 0.921
3.737 1.714 0.9
3.342 1.821 0.887
3.737 1.929 0.875
3.342 2.036 0.853
3.737 2.143 0.829
3.737 2.25 0.811
ples generated from the augmenter.
In summation, our final model chosen to be tested
on real images has been trained up to noise tolerance
of 3.342
◦
, though practically it is considered accurate
up to a value of 1.393
◦
. The auto-encoder has been
trained across 6000 epochs, 4000 with a batch size of
32 and 2000 with a batch size of 512 for finer adjust-
ments. The classifier is trained for 2000 epochs at a
batch size of 512 with early stopping. Early testing
showed this to be the best batch size for the classifier
and is in-keeping with the findings of (Xu et al., 2019)
although the datasets are quite different at this point
due to the differing thresholds on magnitude.
5 RESULTS
Before testing the model we can examine the results
of the source detection algorithm. Across 11900 im-
ages simulated in Stellarium with a magnitude thresh-
old of three, 1104659 sources were detected vs the
true value of 1036254 stars being present within
those images. The disparity stems from two primary
sources, the first, and most common, is the presence
of stellar phenomenon across many of the images,
most common was various meteor showers that were
detected in images located across the breadth of the
Earths surface, these were subsequently picked up as
one or more sources in each of the images in which
they exist and account for the vast majority of the
discrepancy between actual stars and sources. Ad-
ditional detections stem from certain stars that were
detected as multiple sources, though rarely, as well
as a minor discrepancy between those stars simulated
within Stellarium vs those that were calculated as be-
ing present in the image based off the Yale bright
star catalogue. Namely where Stellarium calculated
a stars apparent magnitude to be different to the cat-
alogue, and where this value pushed a star below our
magnitude threshold, it resulted in stars being shown
that shouldn’t be.
The SVM was trained on the angular distance
from each star in an image to the center of that im-
age. Within the 11900 synthetic images we obtain
1036254 distances. With a train test split of 0.2 it
scored an accuracy of ∼ 0.9988 with an average error
of 0.05
◦
.
Figure 8 showcases the auto-encoders ability to
move from a noisy sample to the clean version
thereof. Displaying the discretized angular distances
of D
sn
and D
nn
concatenated together. The second
chart, autoencoder output, serves as the input to the
classifier and is used to determine the final prediction.
In this instance a random choice of noise and magni-
tude of that noise has been applied, resulting in minor,
but noticeable differences between the noisy sample
(top) and clean version (bottom). The auto encoder is
able to accurately move from this noisy sample to a
very close approximation of the clean sample, high-
lighted in the 3rd chart by rounding the values.
Figure 9 shows a more extreme case of noise. Us-
ing our chosen auto-encoder from the final model we
took forward, which is stated as effective up to an
angular distance noise of 1.343
◦
, this figure shows
the results for a sample with maximum angular noise
applied. Here the deformation between the noisy
and clean sample is markedly more pronounced, and
whilst the auto-encoder output bares less resemblance
compared to our previous example, it still returns a
Noise Robustness of Data-Driven Star Classification
181

Discretized angular distance
Count
Figure 8: Autoencoder results.
good approximation of the clean sample.
The next stage of testing is carried out using the
combined model on simulated images. Such images
contain within them a wide variation on both the noise
types and magnitude thereof. Of the 1104659 sources
classified, 1036254 of which we know to be true stars
present within the image, the model successfully clas-
sifies 859287 of these stars with an average confi-
dence of ∼ 0.937. In contrast to (Xu et al., 2019) we
apply no final stage of weight searching, each star is
identified solely based on its GNSs within the image.
Within the broad-strokes of results there are some key
points of note. Firstly, 68405 sources are false stars
themselves as determined by cross checking known
locations against detected source co-ordinates. Of the
149423 incorrectly identified stars, 90919 occur in
examples of extreme pixel, and thus angular, noise.
We know this by cross-checking the source location
against known stars in the image, to a certain pixel tol-
erance here set as 8 pixels. In total ∼ 13.53% of stars
are miss-identified, with ∼ 8.23% of these occurring
in instances of extreme pixel noise in the GRSs loca-
tion.
The impact of false stars and dropped stars is less
easily quantifiable, but by examining images we can
see that there is a much greater tendency towards
miss-identifications on the periphery of the images, as
would be expected in instances where a large portion
of the stars GNSs are cut from view, these represent
instances of significant dropped star noise.
When considering these results through the lens of
navigation, wherein it is less necessary to identify all
stars in the image, and more important to confidently
identify a select few, we can also consider what role
the confidence of our model has with respect to ac-
curacy. The average confidence of successful iden-
tification is ∼ 0.94 in contrast to the confidence of
∼ 0.42 in miss-identifications. By delving into these
confidence scores we can examine what impact ap-
plying confidence thresholds might have on identifi-
cation throughout our image, the end goal being to
reduce miss-identifications, but also to eliminate as
many of the more damaging high-confidence miss-
identifications as possible.
Table 3 shows how the number of correct and in-
correct identifications changes when we discard those
that do not meet a given threshold. We can see an
immediate reduction when limiting our identifications
ICPRAM 2023 - 12th International Conference on Pattern Recognition Applications and Methods
182

Discretized angular distance
Count
Figure 9: Auto-encoder results for max angular noise.
to a confidence score of 0.8, we are able to discard
86.70% of incorrect identifications whilst only losing
10.33% of correct ones. At the extreme, by limit-
ing confidence to 0.999 or above we lose 39.10% of
correct identifications whilst removing the vast ma-
jority, 99.85%, of incorrect identifications. This ex-
treme, presuming clear nights, would allow for cor-
rect identification of more than enough stars for nav-
igation, whilst drastically reducing the probability of
an incorrect identification. With additional checking
measures it would be reasonably easy to eliminate the
remaining incorrect identifications by cross checking
identifications with expected neighbouring stars in an
image.
6 CONCLUSION
In this paper we demonstrate the viability of neu-
ral network star-pattern recognition when applied to
a synthetic dataset emulating the viewpoint at the
Earths surface. The synthetic data represents a new
Figure 10: Application of model to synthetic image, correct
identifications in green and incorrect in red. Highlighted are
4 regions of false star noise due to meteor showers.
Noise Robustness of Data-Driven Star Classification
183

Table 3: Classification results and thresholding impact.
Threshold
Correct
Identifications
% Change
(Total)
Incorrect
Identifications
% Change
(Total)
Baseline 859287 N/A 149423 N/A
0.8 770485 10.33% 19874 86.70%
0.9 741632 13.69% 12039 91.94%
0.95 713120 17.01% 7184 95.19%
0.99 640618 25.45% 2119 98.51%
0.999 523322 39.10% 221 99.85%
Figure 11: Synthetic image results with 0.999 confi-
dence thresholding, showing the removal of all miss-
identifications in the image.
method by which we can garner realistic night-sky
images from a variety of viewpoints as well as the
corresponding information required to utilise them as
a labelled dataset of stars.
We create a data augmenter to avoid pre-
computing training patterns whilst allowing for
greater freedoms with training and testing and para-
metrically explore tolerance towards noise. The fi-
nal implementation performs well on simulated star
patterns and is still able to correctly identify the ma-
jority of stars in the markedly noisier synthetic im-
ages, we threshold our images to a visible magnitude
of 3.0 in order to appropriately simulate the capabili-
ties of inexpensive cameras with low exposure times,
an important consideration when examining this tech-
nology through the lens of celestial navigation from
the Earths surface. Whilst miss-identifications do oc-
cur, we are able to drastically reduce these by utilising
confidence thresholds, a necessary step if the method
were to be used for navigational purposes where miss-
identifications can be damaging.
REFERENCES
Jiang, J., Ji, F., Yan, J., Sun, L., and Wei, X. (2015).
Redundant-coded radial and neighbor star pattern
identification algorithm. IEEE Transactions on
Aerospace and Electronic Systems, 51(4):2811–2822.
Liebe, C. (1993). Pattern recognition of star constellations
for spacecraft applications. IEEE Aerospace and Elec-
tronic Systems Magazine, 8(1):31–39.
Mortari, D., Samaan, M. A., Bruccoleri, C., and Junkins,
J. L. (2004). The pyramid star identification tech-
nique. NAVIGATION, 51(3):171–183.
Na, M., Zheng, D., and Jia, P. (2009). Modified grid algo-
rithm for noisy all-sky autonomous star identification.
IEEE Transactions on Aerospace and Electronic Sys-
tems, 45(2):516–522.
Nabi, A., Foitih, Z., and Mohammed El Amine, C. (2019).
Improved triangular-based star pattern recognition al-
gorithm for low-cost star trackers. Journal of King
Saud University.
Padgett, C. and Kreutz-Delgado, K. (1997). A grid al-
gorithm for autonomous star identification. IEEE
Transactions on Aerospace and Electronic Systems,
33(1):202–213.
Rijlaarsdam, D., Yous, H., Byrne, J., Oddenino, D., Fu-
rano, G., and Moloney, D. (2020). A survey of lost-in-
space star identification algorithms since 2009. Sen-
sors, 20(9).
Stetson, P. B. (1987). DAOPHOT: A Computer Program
for Crowded-Field Stellar Photometry. Publications
of the Astronomical Society of the Pacific, 99:191.
van Bezooijen, R. (1989). A star pattern recognition al-
gorithm for autonomous attitude determination. IFAC
Proceedings Volumes, 22(7):51–58. IFAC Symposium
on Automatic Control in Aerospace, Tsukuba, Japan,
17-21 July 1989.
Wang, G., Li, J., and Wei, X. (2018). Star identifica-
tion based on hash map. IEEE Sensors Journal,
18(4):1591–1599.
Xu, L., Jiang, J., and Liu, L. (2019). Rpnet: A representa-
tion learning based star identification algorithm. IEEE
Access, PP:1–1.
Yang, S., Liu, L., Zhou, J., Zhao, Y., Hua, G., Sun, H.,
and Zheng, N. (2022). Robust and efficient star iden-
tification algorithm based on 1-d convolutional neural
network. IEEE Transactions on Aerospace and Elec-
tronic Systems, 58(5):4156–4167.
Zhang, G., Wei, X., and Jiang, J. (2008). Full-sky au-
tonomous star identification based on radial and cyclic
features of star pattern. Image and Vision Computing,
26(7):891–897.
ICPRAM 2023 - 12th International Conference on Pattern Recognition Applications and Methods
184
