
SAFR-AV: Safety Analysis of Autonomous Vehicles Using Real World
Data: An End-to-End Solution for Real World Data Driven
Scenario-Based Testing for Pre-Certification of AV Stacks
Sagar Pathrudkar, Saadhana B. Venkataraman, Deepika Kanade, Aswin Ajayan, Palash Gupta,
Shehzaman Salim Khatib, Vijaya Sarathi Indla and Saikat Mukherjee
Siemens Technology, India
Keywords:
Autonomous Vehicles, Verification and Validation, Real2Sim, Scenario based Testing, Scenario Analysis,
Scenario Variations, Large Scale AV Data Management.
Abstract:
One of the major impediments in deployment of Autonomous Driving Systems (ADS) is their safety and relia-
bility. The primary reason for the complexity of testing ADS is that it operates in an open world characterized
by its non-deterministic, high-dimensional and non-stationary nature where the actions of other actors in the
environment are uncontrollable from the ADS’s perspective. This leads to a state space explosion problem
and one way of mitigating this problem is by concretizing the scope for the system under test (SUT) by testing
for a set of behavioral competencies which an ADS must demonstrate. A popular approach to testing ADS is
scenario-based testing where the ADS is presented with driving scenarios from real world (and synthetically
generated) data and expected to meet defined safety criteria while navigating through the scenario. We present
SAFR-AV, an end-to-end ADS testing platform to enable scenario-based ADS testing. Our work addresses
key real-world challenges of building an efficient large scale data ingestion pipeline and search capability to
identify scenarios of interest from real world data, creating digital twins of the real-world scenarios to enable
Software-in-the-Loop (SIL) testing in ADS simulators and, identifying key scenario parameter distributions
to enable optimization of scenario coverage. These along with other modules of SAFR-AV would allow the
platform to provide ADS pre-certifications.
1 INTRODUCTION
Autonomous Vehicles promise many benefits over hu-
man drivers in terms of automation, safety, fuel econ-
omy and traffic efficiency. But to facilitate wide-
spread acceptance and usage of autonomous vehicles,
their safety and reliability needs to be proven. Some
studies report 8.8 billion failure-free miles for the AV
to be certified safe (Kalra and Paddock, 2016). This
is very expensive and unsafe to test in the real world.
One way to mitigate this is to do pre-certifications
using Simulation-in-the-loop (SIL) testing. The real
world being a complex environment is difficult to
model by hand. So, it becomes crucial to leverage
data-driven methods and derive the AV environment
models using real world data. (Kalra and Paddock,
2016).
1.1 System Overview
The behavioral competencies of autonomous vehicles
capture their ability to perform appropriate driving
behavior in various situations. But these competen-
cies need to be tested thoroughly in all possible oper-
ating conditions that the AV would face in the real
world. The Road-traffic ecosystem as well as the
driving behaviors of other actors in an AV‘s neigh-
borhood create complex environments characterized
by high-dimensionality (depends on large number of
factors), nonlinearity (varies nonlinearly in a non-
straightforward manner), high stochasticity (has ran-
dom, unmodelled components) and non-stationarity
(the underlying distributions are not constant and
evolve over time).
This makes it very difficult to model the AV en-
vironment mathematically and computationally. The
real-world data already accounts for the above com-
plexities and thus can be used to model the AV en-
vironment. We present a solution called SAFR-AV
232
Pathrudkar, S., Venkataraman, S., Kanade, D., Ajayan, A., Gupta, P., Khatib, S., Indla, V. and Mukherjee, S.
SAFR-AV: Safety Analysis of Autonomous Vehicles Using Real World Data: An End-to-End Solution for Real World Data Driven Scenario-Based Testing for Pre-Certification of AV Stacks.
DOI: 10.5220/0011838800003479
In Proceedings of the 9th International Conference on Vehicle Technology and Intelligent Transport Systems (VEHITS 2023), pages 232-239
ISBN: 978-989-758-652-1; ISSN: 2184-495X
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)

Figure 1: Workflow on Safety Analysis of Autonomous Vehicles from Real World Data or SAFR-AV.
(Safety Assessment from Real World Data for Au-
tonomous Vehicles) (Figure 1) for end-to-end SIL
testing of AV stacks wrt the behavior competencies.
The solution (Figure 1) involves several components:
1. Scenario Identifier (Block 2 in Figure 1) is used
to identify and extract the scenarios relevant for a
given behavior competency (Block 3) from real-
world data (Block 1).
2. The Real2Sim module (Block 5) converts
real-world multi-sensor data to standard rep-
resentations such as OpenScenario (ASAM,
2018)(ASAM, 2022) and creates a digital twin
representation of the scenario (Block 7).
3. The SceVar (Scenario Variations) module (Block
6) takes the real-world data of vehicle trajecto-
ries builds the probability distributions for differ-
ent scenario parameters (Block 8). These dis-
tributions are used to construct logical scenarios
(Block 9) which are then used to generate real-
istic synthetic variations of scenarios (Block 12)
and compute coverage of test space (Block 11).
These scenarios are then simulated in an AV sim-
ulator and the AV’s response is then analyzed with
respect to different automotive safety metrics.
1.2 Key Contributions
In this paper, we present three areas of work along
with their corresponding results.
1. Scenario Set Identifier: A large scale scenario set
search engine to ingest 100’s of Tb of data and
search for specific behavioral competency scenar-
ios
2. Real2Sim: A scenario digital twin creator to gen-
erate OpenScenario standard compliant concrete
and smart scenarios from real world data
3. SceVar: A statistical engine to generate parameter
distributions for a given driving environment (also
known as Operational Design Domain or ODD)
which enables creation of logical scenarios and
computation of coverage of parameter space
2 PRIOR WORK
Scenario based testing is one of the standard ap-
proaches in AV testing (Riedmaier et al., 2020). The
scenarios for AV testing typically have two sources:
knowledge-driven (Bagschik et al., 2018) that utilize
domain knowledge from experts and standards and
data-driven (Fremont et al., 2020)(Medrano-Berumen
and Akbas¸, 2019) which utilize real-world data to
get the ranges, distributions (Knull, 2017)(Wei et al.,
2014), and interactions of scenarios variables. Be-
havior Competency (National Highway Traffic Safety
Administration (NHTSA), 2018) that demonstrate the
ability of an AV to perceive, plan and act appropri-
ately in a situation provide a way to concretize the
testing requirements thus reducing the state space of
AV scenarios. (Tenbrock et al., 2021) presents a
method for extracting scenario database by analyz-
ing time series data from the perspective of every ve-
hicle in the scene. Multi-stage perception pipelines
have been proposed to identify objects and high-level
events from video data (Park et al., 2019). Frame-
works have been developed (Karunakaran et al.,
2022) to automatically build a dataset of logical lane
change scenarios from sensor data, which can be used
to sample test concrete scenarios.
SAFR-AV: Safety Analysis of Autonomous Vehicles Using Real World Data: An End-to-End Solution for Real World Data Driven
Scenario-Based Testing for Pre-Certification of AV Stacks
233

3 SCENARIO SET IDENTIFIER
FOR BEHAVIOR
COMPETENCIES
Behavioral Competency (BC) plays an important part
in describing a common vocabulary for ADS compe-
tencies or features (National Highway Traffic Safety
Administration (NHTSA), 2018). The maturity of
an ADS can be measured as the number of behav-
ioral competencies that it can successfully and safely
demonstrate. A key challenge in the scenario-based
testing methodology is to identify a set of scenarios
where the ADS can be tested for a given behavioral
competency. Our scenario set identifier tool allows
Figure 2: Scenario Set Identification for given behavioral
competency from real world data.
users to search for such scenarios from data recorded
in the real world and uploaded to the tool. Multi-
sensor data (from cameras, lidar, radar and IMU sen-
sors) is recorded and then perception algorithms (Ob-
ject Detection, Tracking, Turn Detection, Intersec-
tion Identification) are run on the raw data to gen-
erate a novel metadata schema. The labelled meta-
data is indexed and stored in multiple SQL, document
and time-series databases. Behavior competencies are
natural language descriptions of capabilities demon-
strated in certain situations. We represent the be-
havioral competencies as a combination of map fea-
tures (junctions, road sections, etc) and traffic events
happening around the vehicle of interest (turns, lane
changes, cut-in/ cut-out scenarios, etc). The behav-
ioral competencies can be easily translated into search
queries that employ the generated metadata to find
the applicable scenarios. Sample datasets that have
been tested include commonly available open-source
AV datasets. Table 1 below shows a subset of the be-
havioral competencies and their corresponding search
queries to identify relevant scenarios where the ADS
can be tested.
The key technical challenges that need to be ad-
dressed for building this search engine are a) high
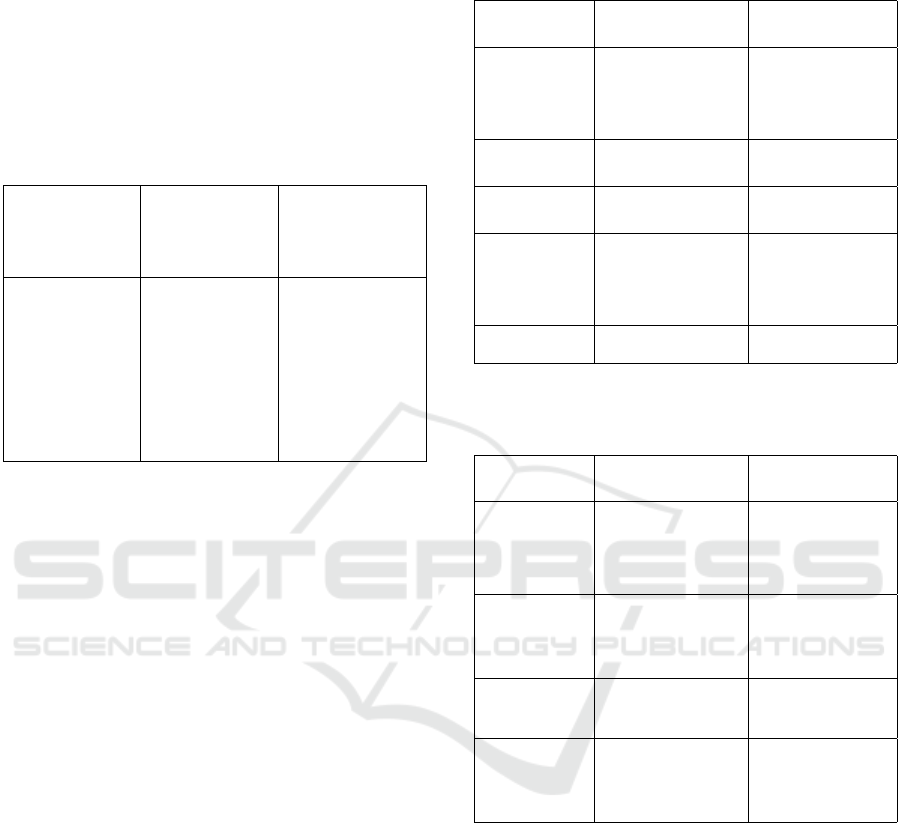
Table 1: Example search queries for behavior competen-
cies.
NHTSA Behav-
ioral Competency
(BC)
Example Search Query
Detect and Re-
spond to Lane
Changes
event = lane change
Detect Traffic
Signals and
Stop/Yield Signs
ODD.signage = stop,
ODD.tra f f ic signal = red
Navigate In-
tersections and
Perform Turns
ODD.intersection = 3way
& turn = le ft||right
Perform High-
Speed Merge
(e.g., Freeway)
ego
v
ehicle
e
vent = merge
& speed > 50mph &
ODD.road way type =
f reeway
speed data ingestion pipeline to ingest Tb’s of raw
multi-sensor recorded data, b) algorithms for auto-
matically labeling this data and c) indexing the an-
notated data for efficient sub-second latency search.
We describe the key performance metrics for such a
search engine – ingestion speed, search performance,
and search accuracy.
Figure 3: Ingestion speed vs Data ingested.
Figure 4: Response time vs Size of dataset searched.
1. Ingestion Speed: the ingestion speed describes the
rate at which data can be ingested by the platform
and is contextualized against the size of data in-
gested. For our tool (Figure 2) the Ingestion speed
comes down slightly as we approach 500 GB of
VEHITS 2023 - 9th International Conference on Vehicle Technology and Intelligent Transport Systems
234

Figure 5: Example results for an AV Scenario Search query.
data ingested as we approach limits of vertical
scaling, then it increases as we horizontally scale
to more number of nodes. It can be seen in Fig-
ure 3 that the ingestion speed improves for larger
dataset size.
2. Search Performance: The average search query
response time describes how much time it’d take
to search through a database and retrieve raw sen-
sor data of scenarios relevant for the query. It can
be seen in Figure 4, that our search performance
is consistent, ie, the time taken to retrieve results
from complexity analogous to O(n) where n is the
size of database that is searched through.
3. Search Accuracy: When the behavioral compe-
tency is linked to a single search term (e.g. de-
tect and respond to lane changes) the search ac-
curacy is directly linked to the accuracy of the
corresponding perception algorithm. However,
for compound searches (e.g., perform high-speed
merge) (Table 1) the accuracy of the search is
computed as the product of the accuracy of inde-
pendent search terms, as the events are detected
independently.
Figure 5 shows the scenario search tools which re-
turns set of scenarios for a specific search query along
with timestamps for when the queried event hap-
pened.
4 Real2Sim - REAL WORLD TO
SIMULATION DIGITAL TWIN
OF SCENARIOS
There are three common ways to test for behavioral
competencies (Kalra and Paddock, 2016) a) X in loop
(X = Software, Hardware, Vehicle), b) testing in a
closed-loop track and c) testing on public roads. In
our approach we first use software in the loop test-
ing (SIL) using simulators (e.g. CARLA, Siemens
Prescan) to test the ADS stack. The test scenar-
Figure 6: Digital Scenario Creation from Extracted Real
World Data.
ios for each behavioral competency identified from
the module in Section III need to be converted to a
digital twin for testing in a software simulator. We
use a standard format (e.g. ASAM OpenScenario
(ASAM, 2018)(ASAM, 2022), OpenDrive (ASAM,
2017)) which is supported by a wide variety of simu-
lators. This conversion from real world multi-sensor
data to ASAM OpenSCENARIO is done using the
Real2Sim module (Figure 6).
4.1 Key Challenges in Real2Sim
The key challenges in conversion from real world are
fidelity and responsiveness. The fidelity of the con-
version refers to “realism” of the digital twin wrt the
static and responsive aspects of the environment. The
challenge here is in detection and positioning the ob-
ject relative to one another, especially if there are no
high definition (HD) maps available. Fidelity also
refers to the overall visual realism of the scenario,
which calls for accurate positioning of street furni-
ture, buildings and vegetation, along with realistic
textures. Responsiveness refers to the elements such
as vehicles, pedestrians, etc. that potentially react to
SAFR-AV: Safety Analysis of Autonomous Vehicles Using Real World Data: An End-to-End Solution for Real World Data Driven
Scenario-Based Testing for Pre-Certification of AV Stacks
235
their environment and stimuli that they receive. The
the responsive elements of AV’s environment should
respond to the actions taken by the AV. This can be
achieved by conditioning the actor behavior on ego
actions through triggers. The OpenSCENARIO stan-
dard supports a set of triggers and conditions, and ex-
ample of which is mentioned in Table 2 below.
Table 2: Trigger conditions that can be used to create re-
sponsive behavior.
Condition
Description Example Ap-
plication to
Behavioral
Competency
Relative Dis-
tance Condi-
tion
Condition
checking the
relative dis-
tance between
two entities
Other car to
start taking
a turn at the
intersection
when the ego
vehicle is 50m
from the inter-
section
4.2 Real2Sim Methodology
The Real2Sim module automatically converts raw
multi-sensor data into scenarios using the ASAM
standard. There are the three important stages in the
pipeline.
4.2.1 Multi-Sensor Situational Awareness
A suite of algorithms are employed to extract the ve-
hicle trajectories, road furniture, events and actions
in the scene.The algorithms include 3D object de-
tection for vehicles and road furniture (traffic cones,
stop signs, etc), multi-object tracking, event and ac-
tion detection (rapid deceleration, left turns, etc). We
combine results from different redundant algorithms,
based on different sensors like cameras, Lidar, GPS,
IMU etc., to create a unified view of the situation in
hand. The accuracy of these algorithms is calculated
using the corresponding standardized metrics, some
of which are mentioned in Table 3. The accuracy
metrics for some of the algorithms used for multi-
sensor situational awareness on the KITTI dataset is
published in Table 4.
4.2.2 Map Creation
The static road structure of the objects are extracted in
the ASAM OpenDRIVE format. While low fidelity
versions are built with just open-source map infor-
mation, the fidelity of the maps can be significantly
Table 3: Elements of Scenario and evaluation metrics for
quantifying the goodness of their digital twin.
Environment
Element Accuracy Met-
ric
Static
Buildings &
Traffic Furni-
ture (e.g. lights,
cones)
Intersection
over Union
(IoU)
Static
Drivable surface
area
Jacard Coeffi-
cient
Static
Weather (wind,
precipitation)
F1 Score
Responsive
Non-player
characters (cars,
bicycles, trucks
etc)
MOTA (Mul-
tiple Object
Tracking Accu-
racy)
Responsive
Traffic Lights F1 score
Table 4: Evaluation metrics for multi-sensor situational
awareness algorithms on KITTI dataset (Geiger et al.,
2013).
Algorithm
Accuracy Met-
rics
Accuracy
Numbers
3D Object
Detection
Mean Aver-
age Precision
(mAP) [mAP ¿
0.5]
97.8% [Car]
Multiple
Object
Tracking
Multiple Object
Tracking Accu-
racy (MOTA)
65.17% [Car]
Detection
of Turns
Precision and
Recall
1 and 0.6
Detection
of Intersec-
tions
Precision and
Recall
1 and 1
improved by combining the map data with more 3D
information.
4.2.3 Scenario Export
ASAM’s OpenSCENARIO is being rapidly adopted
as the standard for representing scenarios in the
ADAS domain. Most tools and simulators in this do-
main support the format. Thus, representing the re-
sults from Situational Awareness (object lists, events,
etc) in OpenSCENARIO’s storyboard format is cru-
cial in making the scenarios re-usable. The results
from (a) are thus converted to stories, acts, triggers,
conditions, maneuvers and maneuver groups and an
OpenSCENARIO file is built as a result.
VEHITS 2023 - 9th International Conference on Vehicle Technology and Intelligent Transport Systems
236

4.3 Results
We take a behavior competency under test: “detect
intersections and take turns”. Using our Scenario Set
Identification module we extract the scenes relevant
to test this competency from real world data and use
Real2Sim module to generate digital twin scenarios in
standard format from these real-world scenes. (Fig-
ure 5) The Real2Sim module can be extended to sup-
Figure 7: Digital Twins of the Scenarios from Real World
Scenes relevant for a given Behavior competency (Detect
Intersections and Take Turns) from KITTI Dataset (Geiger
et al., 2013).
port any dataset. Figure 8 demonstrates a scenario
created from PandaSet data. The scenario file from
the Real2Sim module can be run by scenario engines
from any supported tools or simulators. Figure 9
demonstrates a Kitti scenario simulated in the Carla
simulator.
Figure 8: Real world scenario extracted from Pandaset
(Xiao et al., 2021) data and visualized in Esmini.
5 SceVar - SCENARIO
VARIATIONS USING JOINT
PARAMETER DISTRIBUTIONS
OF REAL-WORLD DATA
We have discussed about methods to generate con-
crete scenarios or exact replays of the driving data
Figure 9: Scenario extracted from Kitti (Geiger et al., 2013)
data simulated using Carla.
recorded from real world in the Real2Sim section,
where a scenario recorded from real world can be
simulated and used for testing the AV stack. How-
ever there can be vast number of variations possible
of a given scenario description and the AV should be
exposed to them so as to cover the plausibilities it
may encounter in the real world. Hence, we need to
generate and sample all the plausible scenario vari-
ations (permutations and combinations of scenario
variables) based on their statistical significance so as
to maximize coverage of the test parameter(s) space.
In terms of the ASAM standard (ASAM, 2018), these
statistical parameter distributions are used to create
logical scenarios or scenarios which have a distri-
bution instead of a fixed value. SceVar (contextual-
ized in Figure 10) takes the object-list or trajectories
(which involve timestamped coordinates of the vehi-
cles and their velocities) data of all actors in the en-
vironment and constructs the joint probability distri-
butions for the scenario parameters that together de-
scribe a scenario such as turning speed, turning angle,
curvature, etc. used for the behavior competency un-
der test. Constructing univariate distributions for the
Figure 10: Identifying and Encoding distributions of real
world behavior.
individual parameters would allow us to variate the
values of that parameter and generate scenarios based
SAFR-AV: Safety Analysis of Autonomous Vehicles Using Real World Data: An End-to-End Solution for Real World Data Driven
Scenario-Based Testing for Pre-Certification of AV Stacks
237

on statistical significance of each value. But given
that there are multiple scenario parameters that evolve
together to create a scenario, one would need to gen-
erate joint probability distributions that describe how
they behave together and thus generate even more re-
alistic scenario variations.
5.1 Results
Continuing from the behavior competency “Detect In-
tersections and Take Turns”, the parameters of inter-
est would be turning speed, turning angle (Figure 12,
Figure 13) and turning trajectory (Figure 14). These
are learned using statistical methods on large amount
of real-world data. The SceVar module requires map
information (e.g., OpenDrive (ASAM, 2017)) along
with the timestamped coordinates of the vehicles in
that geolocation as shown in Figure 11. Once the
Figure 11: Map of geolocation and real world trajectories
of vehicles driving.
Figure 12: Univariate parameter distributions for turning
speed and turning angles.
Figure 13: Joint probability distributions of turning speed
and turning radius.
scenario variations are simulated with the AV stack
in the loop in an AV environment simulator such as
Siemens Prescan or CARLA, the resulting simulation
Figure 14: Statistically normal turning trajectories learned
from real world data.
data is analyzed with respect to different safety met-
rics such as Time-to-collision (TTC) to quantify the
safety performance of the AV stack using the Sce-
nario Analyzer (SceAnn) module (Figure 15). Fig-
Figure 15: Analyzing Scenarios and AV’s safety response.
ure 16 shows snapshots of two scenes where each ve-
hicle’s interaction is termed safe (vehicle name is in
red color font) and unsafe (vehicle name is in green
colored font). In the first scene, the ego vehicle’s in-
teraction with vehicles ID 8 and ID 9 is unsafe. The
ego vehicle then changes lanes and moves to another
lane and the scene becomes safe with respect to these
two vehicles, but becomes unsafe with respect to the
ID 12 vehicle. These scores from each scene are then
aggregated at a scenario level to generate assessment
on the AV’s safety performance in that scenario.
Figure 16: Per-scene Classification of each AV-other vehi-
cle interaction as safe or unsafe.
VEHITS 2023 - 9th International Conference on Vehicle Technology and Intelligent Transport Systems
238

6 FUTURE WORK AND
RESEARCH CHALLENGES
In this work, we presented SAFR-AV, a platform
for end-to-end Simulation-in-the-loop (SIL) testing
of AV stacks using real-world data for the purpose
of pre-certification wrt various behavior competen-
cies. We presented results on extraction of real-world
scenes relevant for a behavioral competency under
test, conversion of these scenes into digital twin rep-
resentations and generation of real-world distribution
of scenario parameters for optimizing test coverage.
Future work would involve development of coverage
optimization and smart sampling engines for ensuring
exposure of statistical variability of the test scenario
and to generate edge/critical cases. The research chal-
lenges include:
1. Robustness and accuracy of the multi-sensor per-
ception algorithms used to extract relevant scenar-
ios from real world data.
2. Robust map-matching to position the objects cor-
rectly.
3. Generating multi-variate heterogeneous probabil-
ity distributions of sets of scenario parameters.
4. Causality Analysis in the safety assessment mod-
ule to identify failure points and modes for the AV
stack.
REFERENCES
ASAM (2017). ASAM OpenDrive 1.7.0 User Guide.
ASAM Standard ASAM OpenDRIVE 1.7.0, Associa-
tion for Standardization of Automation and Measuring
Systems (ASAM). [Online; accessed 15-February-
2023].
ASAM (2018). ASAM OpenSCENARIO 1.1 User guide.
ASAM Standard ASAM SCENARIO 1.1, Associa-
tion for Standardization of Automation and Measuring
Systems (ASAM). [Online; accessed 15-February-
2023].
ASAM (2022). ASAM OpenSCENARIO 2.0 Public release
candidate. ASAM Standard ASAM SCENARIO 2.0,
Association for Standardization of Automation and
Measuring Systems (ASAM). [Online; accessed 15-
February-2023].
Bagschik, G., Menzel, T., and Maurer, M. (2018). Ontol-
ogy based scene creation for the development of au-
tomated vehicles. In 2018 IEEE Intelligent Vehicles
Symposium (IV), pages 1813–1820.
Clarke, E. M., Klieber, W., Nov
´
a
ˇ
cek, M., and Zuliani, P.
(2011). Model checking and the state explosion prob-
lem. In LASER Summer School on Software Engineer-
ing, pages 1–30, Berlin, Heidelberg. Springer.
Fremont, D. J., Kim, E., Pant, Y. V., Seshia, S. A., Acharya,
A., Bruso, X., and Mehta, S. (2020). Formal scenario-
based testing of autonomous vehicles: From simula-
tion to the real world. In 2020 IEEE 23rd Interna-
tional Conference on Intelligent Transportation Sys-
tems (ITSC), pages 1–8.
Geiger, A., Lenz, P., Stiller, C., and Urtasun, R. (2013). Vi-
sion meets Robotics: The KITTI Dataset. In Interna-
tional Journal of Robotics Research, volume 32, pages
1231–1237. [Online; accessed 15-February-2023].
Kalra, N. and Paddock, S. M. (2016). Driving to safety:
How many miles of driving would it take to demon-
strate autonomous vehicle reliability?
Karunakaran, D., Berrio, J. S., Worrall, S., and Nebot,
E. (2022). Automatic lane change scenario extrac-
tion and generation of scenarios in openx format from
real-world data. Robotics and Autonomous Systems,
148:103816.
Knull, J. E. (2017). Turn detection and analysis of turn pa-
rameters for driver characterization.
Medrano-Berumen, C. and Akbas¸, M. I. (2019). Abstract
simulation scenario generation for autonomous vehi-
cle verification. In 2019 SoutheastCon, pages 1–6.
National Highway Traffic Safety Administration (NHTSA)
(2018). A framework for automated driving system
testable cases and scenarios.
Park, J., Wen, M., Sung, Y., and Cho, K. (2019). Multiple
event-based simulation scenario generation approach
for autonomous vehicle smart sensors and devices. In
2019 IEEE Intelligent Transportation Systems Confer-
ence (ITSC), pages 1003–1008.
Riedmaier, S., Ponn, T., Ludwig, D., Schick, B., and Dier-
meyer, F. (2020). Survey on scenario-based safety
assessment of automated vehicles. IEEE Access,
8:87456–87477.
Tenbrock, A., K
¨
onig, A., Keutgens, T., Bock, J., Weber, H.,
Krajewski, R., and Zlocki, A. (2021). The conscend
dataset: Concrete scenarios from the highd dataset ac-
cording to alks regulation unece r157 in openx.
Wei, F., Guo, W., Liu, X., Liang, C., and Feng, T. (2014).
Left-turning vehicle trajectory modeling and guide
line setting at the intersection. Discrete Dynamics in
Nature and Society.
Xiao, P., Shao, Z., Hao, S., Zhang, Z., Chai, X., Jiao,
J., Li, Z., Wu, J., Sun, K., Jiang, K., Wang, Y.,
and Yang, D. (2021). PandaSet: Advanced Sensor
Suite Dataset for Autonomous Driving. arXiv preprint
arXiv:2112.06058. [Online; accessed 15-February-
2023].
SAFR-AV: Safety Analysis of Autonomous Vehicles Using Real World Data: An End-to-End Solution for Real World Data Driven
Scenario-Based Testing for Pre-Certification of AV Stacks
239
