
Analysis of Sensor Attacks Against Autonomous Vehicles
Søren Bønning Jakobsen, Kenneth Sylvest Knudsen and Birger Andersen
a
DTU Engineering Technology, Technical University of Denmark, Ballerup, Denmark
Keywords:
Autonomous Vehicles, LiDAR, Camera, Sensors, Attacks, Countermeasures, Security, Multi-Sensor Fusion.
Abstract:
Fully Autonomous Vehicles (AVs) are estimated to reach consumers widely in the near future. The manufac-
turers need to be completely sure that AVs can outperform human drivers, which first of all requires a solid
model of the world surrounding the car. Emerging trends for perception models in the automobile industry
are towards combining the data from LiDAR and camera in Multi-Sensor Fusion (MSF). Making the percep-
tion model reliable in the event of unforeseen real world circumstances is tricky enough, but the real challenge
comes from the security issue that arises when ill-intentioned people try to attack sensors. We analyse possible
attacks and countermeasures for LiDAR and camera. We discuss it in context of MSF, and provide a simple
framework for further analysis, which we conclude will be required to conceptualise a truly safe AV.
1 INTRODUCTION
Due to advances in technology in recent years, au-
tonomous vehicles are becoming more and more real-
istic on public roads. Car manufacturers have already
dealt with extremely complex challenges such as self-
navigation and collision prevention. Some places in
the US are even beginning to allow self-driving cars
under specific circumstances (Jones, 2022). There are
different levels describing how autonomous a car is
(Petit, 2022), and the aforementioned cars are exam-
ples of category 3 autonomous cars. Today, the race
between manufacturers to become the first company
to release a fully autonomous category 5 car contin-
ues. Considering the end goal means giving the AV
complete control with no oversight, it is important
during testing, to make sure that the consumer is com-
pletely secure. This means that the AVs will have to
withstand not only rigorous testing, but also the chal-
lenges that arise in the real world, where people might
intentionally try to cause crashes.
Researchers, as well as white-hat hacker groups,
have been conducting tests on these cars and their
flaws. For example Keen Security Labs in China
demonstrated flaws in security in a Tesla Model S,
that allowed them to remotely hack into the car, and
make it change to the reverse lane (Tencent Keen
Security Lab, 2019). Another example is found in
(Eykholt et al., 2018b), where researchers managed to
confuse the perception algorithm to have a stop sign
a
https://orcid.org/0000-0003-1402-0355
classified as a speed limit sign using stickers.
In this article, we will analyse attacks, specifically
attacks aimed at the AV’s ability to perceive the world
around it through sensors. Considering all the differ-
ent technologies involved, the complexity of attacks
on AV’s sensors vary wildly. We will focus on remote
attacks on the physical sensors, but also the underly-
ing algorithms working on the sensor data. We as-
sume that attackers have no access to the vehicle, yet
aim to attack the perception model of the AV, since
any attacks here will cascade into all other decision-
making that an AV does.
2 HOW AN AV MODELS ITS’
SURROUNDINGS
There are many variables and obstacles on public
roads like pedestrians, other cars, turns, traffic lights,
bicycles and much more. Before an AV can safely
drive on public roads, the car first and foremost needs
to see better than humans in order to drive better.
This has been a major hurdle for development. By
combining different sensing technologies, developers
have created detection systems which can “see” better
than human eyes (Burke, 2019). The common tech-
nologies in AVs used for mapping the environment
are LiDAR (Light Detection and Ranging), radar (Ra-
dio Detection And Ranging) and cameras. Radar and
LiDAR are somewhat interchangeable, as they offer
a lot of the same information with different pros and
Jakobsen, S., Knudsen, K. and Andersen, B.
Analysis of Sensor Attacks Against Autonomous Vehicles.
DOI: 10.5220/0011841800003482
In Proceedings of the 8th International Conference on Internet of Things, Big Data and Security (IoTBDS 2023), pages 131-139
ISBN: 978-989-758-643-9; ISSN: 2184-4976
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
131

cons. This has led to debates in the industry about
which is best. Currently, Google, Uber and Toyota all
rely heavily on LiDAR, while Tesla are the only real
advocates for Radar (Neal, 2018). Because of this,
our focus will be on camera and LiDAR.
2.1 Camera
AV perception is achieved by many sensors and sen-
sor systems. One of the first sensors used was the
camera. For AV the camera is used to visualize its
surroundings. The camera is used for lane detec-
tion, horizon/vanishing point detection, object detec-
tion and tracking of vehicles and pedestrians, traffic
sign recognition and headlight detection, as demon-
strated by the colored boxes in Fig. 1.
Cars can have multiple cameras covering a 360 de-
grees view of their environment. Cameras are very
efficient at detecting texture of objects. For imple-
mentation, cameras are more affordable than LiDAR
and radar sensors. The high pixel quality obtained by
the camera comes with a price of computation power.
Today cameras can take pictures with millions of pix-
els in each frame and about 30-60 frames each sec-
ond. Each of these frames needs to be processed in
real time in order for the car to make real-time deci-
sions, this requires lot of computational power (Ko-
cic et al., 2018). Image quality is important for the
system to classify the objects. The quality can be af-
fected by lenses, windshield, vibration, environmen-
tal conditions like snow, rain, fog and light. All these
image disruptions can result in unnoticed objects and
increasing image correction processing time. Some
cars use a multi-camera setup where some cameras
overlap each other (Petit et al., 2015).
The camera creates a good representation of the
environment, however the depth perception is not
nearly as good as that of other sensors, which is why
LiDAR technology is used.
Figure 1: An image of an autonomous car using LiDAR as
distance measure and camera as object detection (Cameron,
2017).
2.2 LiDAR
The LiDAR sensor fills the existing gap between radar
and camera sensors (Kocic et al., 2018). LiDAR
works by emitting pulses of infrared light and measur-
ing the time taken to reflect on distant surfaces. These
reflections return a point cloud that represents objects
from the environment. Most common LiDAR lasers
use light in the 900 nm wavelength, longer wave-
lengths will perform better in poor conditions, such as
fog and rain. Because the LiDAR sensor has a more
focused laser beam it can create a more dense point
cloud, resulting in a high resolution map of the envi-
ronment (Roriz et al., 2022). Precision is important
in LiDAR systems, as lower precision LiDAR sensor
originate noisy point clouds. How precise a LiDAR is
says how close the estimated point is compared to a
point in the real world.
There are different architectural techniques for
creating the surroundings of the car. They can be
categorized in different groups of spinning and non
spinning (solid state). To get a horizontal 360 view,
LiDAR sensors can be combined with a mechanical
part to spin around while measuring the distance of
the surrounding objects, as shown in Fig. 1. This
is the most common LiDAR application currently. If
LiDAR technology is used but there are no moving
parts, this is called solid state sensors. With solid state
sensors we get a more narrow angle but usually they
are cheaper.
2.3 Multi-Sensor Fusion (MSF)
Multi-sensor fusion is a technique where the input
from multiple sensors are combined, in order to lever-
age the best of both inputs. While it is a possible to
combine several sensor types, current trends in the au-
tomobile industry have gone towards combining cam-
era and LiDAR (Kocic et al., 2018). This minimises
hardware complexity, as only two sensor types are in-
volved, and the information from these complements
each other nicely. The obvious advantages here is the
detailed vision of the camera, allowing for object clas-
sification, and LiDAR for accurate object detection
and detailed range measurements.
MSF have been a major factor in helping re-
searchers make reliable models of an AVs surround-
ings. Researchers in (Kocic et al., 2018) cites appli-
cation of MSF in the detection of objects, grid occu-
pancy mapping for placing these objects in a model
around the vehicle and lastly for tracking the objects
movements within the model. Their example of an
MSF algorithm is the PointFusion network, used for
3D object detection. This algorithm achieves sensor
IoTBDS 2023 - 8th International Conference on Internet of Things, Big Data and Security
132
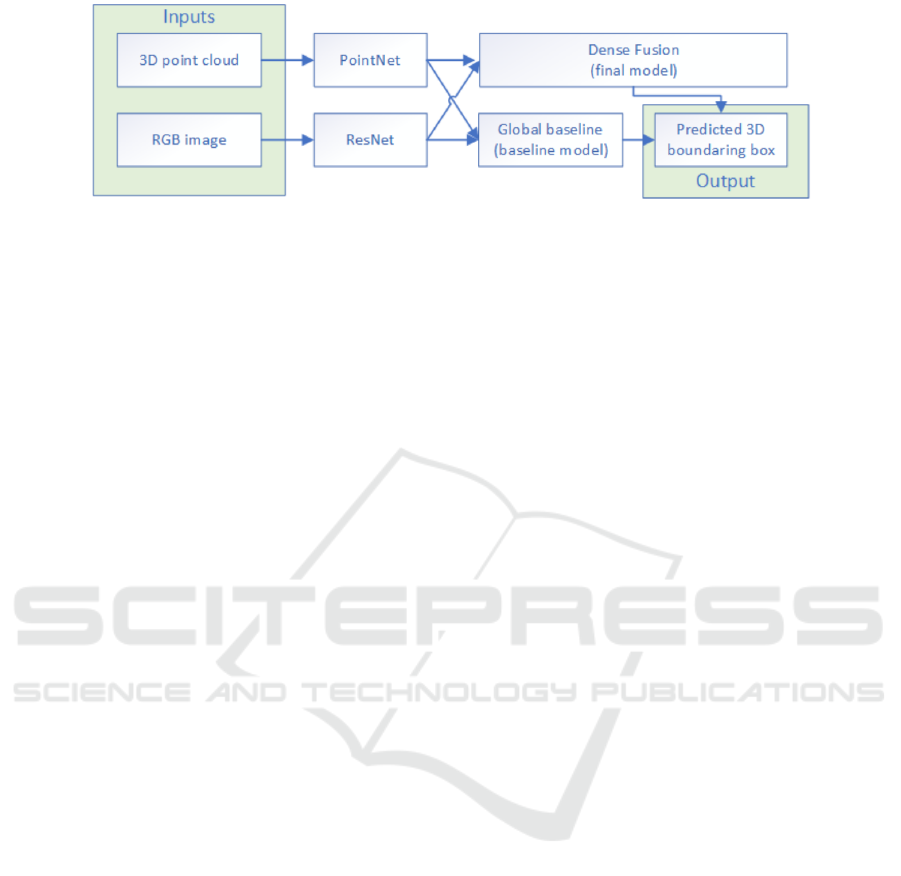
Figure 2: Overview of the neural networks involved in the PointFusion MSF algorithm (Kocic et al., 2018).
fusion by processing each sensor’s data with a differ-
ent Neural Network (NN), and then feeding the repre-
sentations into a new neural network, achieving high-
level fusion as shown in Fig. 2. As seen, the separate
NNs are PointNet and ResNet handling the pointcloud
and RGB (Red-green-blue) image respectively. Their
results are fed to dense fusion algorithm that for each
input point predicts the spatial offset of the corners
relative to the input (Xu et al., 2018). The Point-
Net and ResNet information is also fed to a baseline
model that directly regresses the box corner locations.
Together, the dense fusion predictions and baseline
model results in the predicted 3D boxes, that an AV
would have to navigate it’s way around.
While this is just one way of doing this, there are
many ways to go about it. It really comes down to bal-
ancing the complexity of the mathematics, the com-
putational power in the vehicle and other factors to
design the best sensor fusion algorithm.
3 ATTACKS AND
COUNTERMEASURES
In this section we will explain different attack types,
documenting examples of successful attacks and sug-
gesting possible countermeasures. Since our focus is
remote attacks, our assumption of possible setups to
perform these attack will be categorized into one of
two types, described in (Petit et al., 2015).
Front/Rear/Side Attacks which involve an attacker
who installs hardware in his own vehicle to perform
an attack. This allows the attacker to keep the hard-
ware within distances of a target vehicle for longer
time.
Roadside Attacks which involve a mounted station-
ary setup, that allows for greater precision. This type
of attack is not limited to one installation point, but
can have several if need be.
This section summarises results in Table 1 and Ta-
ble 2.
3.1 Attacks on Cameras
3.1.1 Blinding Attack
Cameras have built in functions to decide how much
light is let into its shutter, in order to take better pho-
tos in all light conditions. This attack type abuses
this function by shining a strong light source into the
camera, in order to either completely blind the cam-
era, or partially blind it, causing it to miss objects. In
experiments performed in (Qayyum et al., 2020), re-
searchers managed to completely blind a camera for
up to 3 seconds by pointing a laser light directly at
the camera, and caused irreversible damage by do-
ing so for several seconds from less than 0.5 meters
away. They also managed to cause partial blindness
by directing a LED (light emitting diode) light matrix
at the camera, inhibiting the object recognition and
proving that there are multiple tools to perform this at-
tack. The researchers performed the testing in station-
ary setups, but they also simulated a front/rear/side at-
tack by wobbling the laser at the camera, which was
still successful, though the blinding was less effective.
3.1.2 Adversarial Example
While not physically attacking the camera, this attack
type attacks the way the information from the cam-
era is processed. The perception models based on
machine learning (ML) and deep learning (DL) have
proven vulnerable to carefully crafted adversarial per-
turbations. Generally, Adversarial Examples (AEs)
are classified as ’Appearing Attacks’ and ’Hiding At-
tacks’. There have been published several attacks of
this type, where most are evaluated on stop signs as
they are a critical part of decision making in driving.
Researchers in (Eykholt et al., 2018b) executed such a
hiding attack, where they designed specific black and
white stickers that caused misclassifications of stop
signs. In order to fool any human onlookers, they de-
signed the stickers to look like graffiti and still man-
aged to make the sign be classified as a speed limit
sign in 87,5% of the tests. In the opposing category,
(Eykholt et al., 2018a) managed to make innocent
Analysis of Sensor Attacks Against Autonomous Vehicles
133
Table 1: Overview of attacks.
Attack type Target sensor Method Impact Feasibility
Blinding
attack
Camera Blinding the camera with some kind of
light source, making the camera unable to
guide the Vehicle
Low Easy
Adversarial
Examples
Camera Introduce objects with adversarial pertur-
bations, to confuse perception model
High Hard
Spoofing
attack
LiDAR Relaying light pulses in a different posi-
tion, creating fake obstacles.
High Medium
Saturation at-
tack
LiDAR Jamming or blinding LiDAR sensors by
emitting strong light in same wavelength as
the LiDAR sensor.
Low Easy
looking stickers be classified as stop signs. There
are other examples of real world applications, such
as (Cao et al., 2021), where researchers 3D printed a
traffic cone that was ignored by cameras, and (Zhou
et al., 2020) who designed a billboard that causes mal-
function in the steering angle of AVs. This attack type
appears mostly as a roadside attack.
3.2 Attacks on LiDAR
3.2.1 Spoofing by Relaying Attack
LiDAR sensors are what is called active sensors (Shin
et al., 2017). This means that the LiDAR sensor to
detect an object emits light intentionally from its own
sensor and then listen to the echo. Because the speed
of light is constant the LiDAR sensor can calculate the
distance by measuring the ping time of the signal. In
spoofing attacks the attacker uses this signal created
by the victim but relays it back from a different po-
sition. The goal of spoofing is to deceive the victims
LiDAR sensor and to create fake point clouds. The
creation of fake points could potentially cause the AV
to make sudden erroneous decisions.
Active LiDAR sensors use particular waveform to
differentiate echoes from the other inbound signals.
This means before the attacker can perform the at-
tack, he needs to obtain the ping waveform. When the
waveform of the victims LiDAR sensor is obtained,
the attacker can now perform the attack by relaying
the signal back to the LiDAR sensor. This attack is
effective because the victim car has a hard time to dis-
tinguish what signals are real or fake and is unaware
of the attack, potentially providing seemingly legiti-
mate but actually erroneous data. There are two ways
to perform this attack. One way is to place the attack-
ing device on the roadside and then aiming towards
the victim lane (Cao et al., 2019), however it could
also be performed as a front/rear/side attack, using
computer vision to keep track of the vehicle and to
aim precisely. This would however be significantly
more difficult to execute. First some of LiDAR sen-
sors used in cars are spinning LiDARs. This means
that the victims LiDAR sensor has to be facing the at-
tacking direction. In order for the attack to work the
echos has to hit victims sensor at the right receiving
angle. The second problem is that LiDAR will only
accept echos within a certain delay time. Because of
the delay threshold the distance between attacker and
victim has a big influence on the attack window. Arti-
cle (Petit et al., 2015) performs a spoofing attack, and
relates timing to the success of spoofing.
3.2.2 Saturation Attack
Typically sensors has a lower and upper bound for in-
put signals (Shin et al., 2017). If signals arrive at the
sensor with a low signal power, the sensor will ignore
the signal. When the signal increases it eventually
exceed the upper threshold, at this point the sensor
cannot reflect the input changes well. Therefore the
principle of saturation is to expose the target sensor
to a signal of high, making the sensor unable to work
properly. Because the sensor is unable to receive any
new signals while under a saturation attack, this at-
tack is a DoS (Denial of Service) or a blinding attack,
since it uses light as a medium.
Saturation attacks are powerful because they are
unavoidable, and though it is easy to detect it can-
not be prevented. Human drivers and pedestrians will
be unaware of the attack because LiDAR operates
in eye safety wavelength namely infrared light. In
(Shin et al., 2017) they performed saturation attack
with both weak and strong light sources. The ex-
periments made was successful and had different out-
come for the weak and strong light. When the attack
was performed with weak light they observed ran-
domly located fake dots, while with the strong light
source, they observed that the sensor became com-
pletely blind in a sector of Field of View (FoV).
IoTBDS 2023 - 8th International Conference on Internet of Things, Big Data and Security
134

3.3 Countermeasures on Cameras
3.3.1 Redundancy
In (Petit et al., 2015) argues the simple benefit that
more cameras with overlapping view will at least
make a blinding attack harder to execute. In (Qayyum
et al., 2020) researcher emulated a handheld blinding
attack by laser, which would be very hard if several
cameras were present. The argument for more cam-
eras could also be supported by the findings in (Liu
and Park, 2021), which suggests an algorithm for rec-
ognizing perception error attacks in MSF, which re-
quires stereo cameras. This will be further elaborated
on in section 3.5. Though this solution seems simple,
it is important to remember the extra space and cost
associated with it, which are very essential factors in
the highly competitive automotive industry. There is
also an argument that integrating more cameras in-
troduces more complexity in synchronizing the cap-
turing of frames and maintaining the same exposure
(Petit et al., 2015), though this should easily be over-
come with today’s technology.
3.3.2 Optics and Materials
In (Petit et al., 2015) argues that removable on-
demand near-infrared-cut filter, a feature commonly
found in security cameras, could serve as a defence
against blinding attacks. They argue that such a de-
fence would only be usable during daytime, as the
filter would have to be removed during nighttime,
in order to make use of infrared light for night vi-
sion. Intelligent applications of this countermeasure
should be considered, perhaps by implementing soft-
ware with thresholds for when it considers the camera
to be under attack.
Another defensive material is photochromic
lenses, which is a type of lenses that change color
to filter out specific types of light. Several types of
lenses or coating of lenses could be considered, but as
an example vanadium-doped zinc telluride will turn
more opaque when hit by high-intensity beams, auto-
matically filtering these without effecting image qual-
ity in low light conditions (Petit et al., 2015). Once
again the hardware and development costs should be
considered.
3.3.3 Making AE Robust Perception Models
Researchers in (Qayyum et al., 2020) provide a very
thorough examination of how to make adversary ro-
bust ML/DL solutions and their efficiency. This is
a very wide and highly technical topic, which we
consider outside the scope of this article. We will
therefore refer the interested reader to the article, and
quickly mention solutions in simple concepts, as well
as the conclusions.
Suggestion is re-training a given classifier on im-
ages including adversarial attacks, although this ap-
proach is easily criticized for being reactive and vul-
nerable to attacks that simply generate new attack
types. Also is suggested training an auxiliary model,
whose sole purpose is to detect features commonly
found in pictures with AEs and classify a frame as
an outlier if it contains it. Conclusion is that there
are multiple directions that solutions can go, and that
they often can be combined. More research is needed
in order to facilitate a solid defense, but it is feasible,
and a valuable addition to make safer AVs.
3.4 Countermeasures on LiDAR
3.4.1 Saturation Detection
As described in section 3.2.2 saturation can easily be
detected by the sensor system. A victim vehicle could
have an inbuilt fail-safe mode, so when the car detects
saturation, it slows down the car and pull to the side
(Shin et al., 2017). This countermeasure could on a
crowded road lead to a dangerous situation. If the car
has to pull to the side while having a jammed LiDAR
sensor, it is like a person driving with closed eyes.
3.4.2 Redundancy and Fusion
One countermeasure could be by having multiple Li-
DARs overlapping some FoV angles (Shin et al.,
2017). With redundant LiDAR sensors, the victim car
could under saturation attacks abandon input from the
attacked sensor until the attack is over. Though the
car knows when it is exposed to saturation, it is sig-
nificantly harder to detect spoofing. The redundant
setup will still work better against spoofing by cross
validating the malicious points. If the attacker cre-
ates fake points in the non-overlapping zone, redun-
dancy will have no effect. LiDAR sensors are expen-
sive so using multiple sensors will increase the overall
cost a lot. This solution is not bullet proof, because
the attacker is still able to attack multiple sensors at
the same time. Another option proposed in (Petit
et al., 2015) is to take advantage of data intercepted by
neighboring AVs. Victim vehicle could cross-validate
its data with neighboring data to observe inconsisten-
cies. This method only works if there are other vehi-
cles on the road. Vehicle to Vehicle (V2V) solution
opens up for more hacking opportunities because one
neighboring vehicle could share incorrect data or be-
ing tool of the attacker.
Analysis of Sensor Attacks Against Autonomous Vehicles
135

Table 2: Overview of countermeasures.
Countermeasure Sensor Method Preventing at-
tack
Feasibility
Redundancy Camera Adding more camera with a significant
overlap in view
Blinding
attack, assists
MSF attack
detection
High
Optics and
materials
Camera Adding smart materials, that can filter out
harmful light
Blinding
attack
High
Making AE
robust percep-
tion models
Camera Using advanced techniques to make AE at-
tacks more difficult
Advarsarial
attack
Low
Saturation de-
tection
LiDAR Builtin Fail-safe mode. Under attack slows
down and pull to the side.
Saturation High
Redundancy
and Fusion
LiDAR Multiple LiDAR setup with overlapping
FoV. By comparing input from multiple
overlapping sensors it is possible to detect
and prevent some attacks
Saturation
and spoofing
High
Random
probing
LiDAR By randomizing LiDAR pulse interval
makes spoofing very difficult to perform
Spoofing Medium
Side-channel
authentication
LiDAR Using side-channel information as authen-
tication. Authentication makes it very dif-
ficult to spoof a LiDAR, not knowing the
secret key
Spoofing High
Multi-Sensor
Fusion
LiDAR and
Camera
Use smart MSF to model both LiDAR and
camera data, checking for inconsistencies
Camera blind-
ing, LiDAR
Spoofing, sat-
uration, relay
and rotation
Medium
3.4.3 Random Probing
When making a spoofing attack on LiDAR sensors, a
hacker will be interested in the pulse interval. This
interval is the timing for when the attacker needs to
fire back attacking pulses (Deng et al., 2021). By ran-
domizing the interval it makes it hard for the attacker
to synchronize the attack. This method is problematic
for spinning LiDAR systems, as they require a con-
stant rotation speed and angle of transmission needs
to be known (Petit et al., 2015). Another option here
is to skip some pulses, as this will only require some
software modification. When the sensor skip a pulse
it is still able to listen to incoming pulses, making it
possible to detect possible spoofing attacks. If the
sensor is skipping some of the pulses, it has to run
with a higher rotation speed, to keep the same resolu-
tion (Shin et al., 2017). It is important that the skipped
pulses are chosen in a secret pseudo-random fashion,
so attacker cannot predict the skipped pulse.
3.4.4 Side-Channel Authentication
To understand this countermeasure it is essential to
know what is meant by side-channel information.
Side-channel information is physically leaked infor-
mation, which could for example be power consump-
tion or electromagnetic radiation. The suggested
side-channel information in (Matsumura et al., 2018)
comes from a cryptographic device in the car. The
device is making heavy calculations using AES (Ad-
vanced Encryption Standard) on a cryptographic key,
and the electromagnetic radiation during these calcu-
lations are read. This information is then used to mod-
ulate and demodulate the amplitude of the laser. It
will then only accept returning echoes with exactly
this modulation. Though feasible, it becomes very
difficult for the attacker to send fake echoes with the
correct modulation, and the car can simply change the
cryptographic key once in a while to have varying side
channel information.
3.5 Countermeasures via MSF
Evaluating countermeasures via MSF can be difficult,
as it is an emerging research topic with many ap-
proaches mathematically. As such, we will base this
section on (Liu and Park, 2021), a newly released pa-
per with meta reflections and criticisms of the current
state of MSF algorithms, as well as a suggested new
approach.
An important point raised, is that most of the
aforementioned attacks are evaluated on a single sen-
IoTBDS 2023 - 8th International Conference on Internet of Things, Big Data and Security
136

sor type. They argue that today’s AVs do not build
their model of their surroundings based on a single
sensor type, but rather through the combination of
data through the use of MSF. This immediately raises
the abstraction level of the discussion, as physical at-
tacks on sensors needs to be evaluated based on the
whole perception system. As an example, they criti-
cise the design of some MSF algorithms, as their de-
sign seems too focused on working in non-adversarial
settings. The algorithm F-PointNet uses a cascade ap-
proach to fuse LiDAR and camera data, by generating
2D proposals on the image data, and then projecting
these onto 3D space, refined by the LiDAR data. This
makes it especially vulnerable to camera attacks, as
the detection failures accumulate through to the Li-
DAR steps of the fusion algorithm. The researchers
conclude that any MSF built around the idea of pro-
jecting either LiDAR or camera data onto the other,
will be significantly more vulnerable to attacks at the
sensor considered to be the ’primary’.
To combat the issues, the researchers designs their
own sensor fusion algorithm, which uses CV and ML
to map features on both the camera and LiDAR data,
and analyzing any features that cannot be mapped to
both. The results of their design for camera attacks
yields a 100% detection rate, and for LiDAR attacks
their detection rate for spoofing and saturation are
97% and 96% respectively. Thus proving that MSF
can be leveraged for a significant defence against at-
tacks on the sensors providing the data. They do
however make a point, that AEs attacking sensory
data processing algorithms of camera or LiDAR data
would not be detected through their algorithm, as they
would not appear as sensor malfunctions.
4 DISCUSSIONS
There is not doubt that AVs will arrive in the near fu-
ture, but it is clear that one of the major hurdles is not
just beating the difficult tasks of modeling the sur-
roundings and navigating them, but also making the
perceived information resistant to attacks. As noted
in (Jones, 2022) a recent study showed that only 14%
of drivers trust an AV to do all the driving, while 54%
are too afraid to try it and 32% are unsure. Convinc-
ing people will require delivering a product that com-
pletely delivers on all safety measures, before pub-
lic opinion deems AVs to be too dangerous. In Table
1 and Table 2 we have summed up our attacks and
countermeasures, but it is still difficult to concretely
say that a consumer is sufficiently safe. How do you
come up with guarantees in a field that moves so fast
in so many directions?
In (Qayyum et al., 2020) they discuss the possi-
bility of threat modeling, as a fundamental approach
to safety analysis. Here they mention several impor-
tant aspects including, but not limited to, Adversarial
Knowledge, Adversarial Capabilities and Adversarial
Specificity.
Adversarial Knowledge refers to the required knowl-
edge for executing an attack. Typically, adversarial
attacks are referred to as either white-box, gray-box,
or black-box. White-box assumes that the attacker has
full knowledge of the underlying systems, be it hard-
ware or software. Gray-box assumes partial knowl-
edge of the underlying mechanisms and black-box as-
sumes no knowledge, to the point where they might
not even know which ML algorithm the perception
model they are trying to attack is built on. This is ar-
guably the most important dimension to consider, es-
pecially if you factor in who is the perceived target.
With the increased tendency towards cyber-warfare
that we are seeing internationally, high-priority tar-
gets like heads-of-state can expect to be targets of
incredibly sophisticated attacks that regular people
would have no need to fear.
Adversarial Capabilities defines the assumed capabil-
ities of the attacker, which is important scope to con-
sider. This leans itself towards knowledge as well, but
also economic as in (Petit et al., 2015), where they
specifically focus on attacks requiring only commod-
ity hardware. They do this under the assumption, that
the attacks requiring the least economic and technical
knowledge will be most common, an argument that
can definitely be extended to our definition as well.
Adversarial Specificity means how specifically tar-
geted an attack is. This could be a consideration of
whether or not the laser damage to the cameras tested
in (Petit et al., 2015) would translate to the damage
on other cameras, or as mention in (Qayyum et al.,
2020), that black-box AEs for one ML/DL model are
assumed to affect other models trained on datasets
with a similar distribution as the original one. It is
in the interest of car manufacturers, that attacks do
not generalise well across hardware and software.
With this information in mind, one can start re-
flecting on the future of safety precautions, though
nothing is set in stone. We can expect that simple
hardware attacks will happen, be it blinding of cam-
eras and attempts at tricking the LiDAR, consider-
ing just how low knowledge, capability and speci-
ficity requirements are especially for the camera at-
tacks. Whether it is smartest to adopt some of the
novel approaches suggested in sections 3.3 and 3.4, or
trust in the higher level protection of MSF that checks
for physical attacks is hard to tell. As with many IT-
security questions, the answer might be somewhere in
Analysis of Sensor Attacks Against Autonomous Vehicles
137
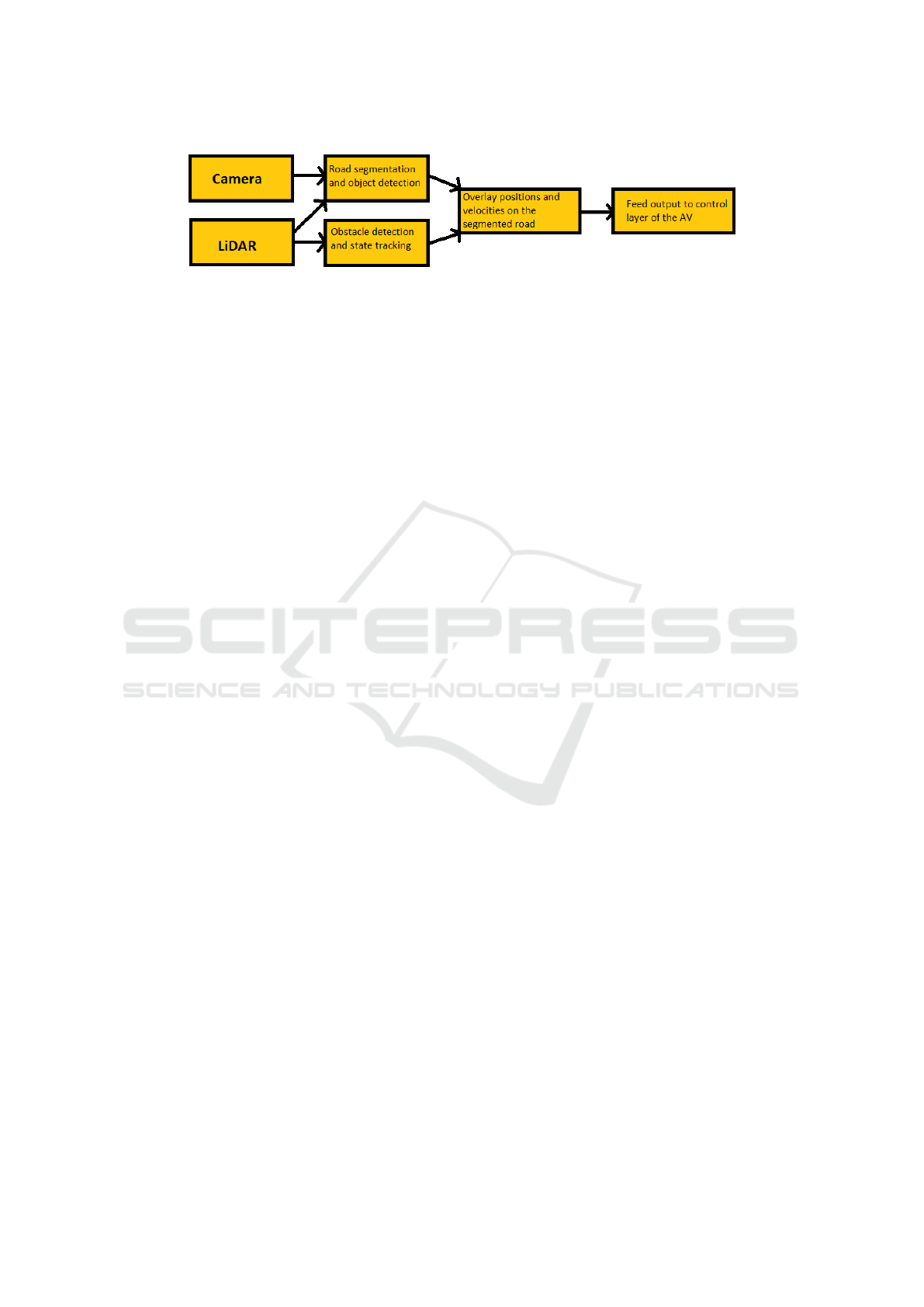
Figure 3: Overview of the suggested pipeline for the data (Jahromi et al., 2019).
middle by combining both.
State-of-the-art researches on MSF have proven
that it can be a valuable tool to detect attacks on sen-
sors (Liu and Park, 2021), but one should not see
this as a excuse to leave them wide open. They note
that attacks are still feasible, however, they would
need to attack both camera and LiDAR simultane-
ously and gradually, as sudden shifts would be de-
tected. This raises the knowledge and capability re-
quirements enormously, to the point where one could
argue that any attacker with such capabilities should
just ram another car into it’s victim to get the same
results with way less effort.
IT-security often becomes an arms race, as re-
searchers have already tested attacks through adver-
sarial examples, that trick both camera and LiDAR
(Cao et al., 2021). This should beat any MSF that
cross-validates, as none of it’s sensors will detect the
object. Researchers in (Liu and Park, 2021) cites ex-
actly adversarial examples as a weakness, and though
this attack appears to have had huge knowledge and
capability requirements to create, the finished 3D
model could theoretically be sold on a black market
for very little. This would quickly lower the availabil-
ity of the attack to anyone with a 3D printer.
It is clear that an attack like above certainly com-
plicates things, and it will not be the last to do so.
Though the complexity of the topic might seem dis-
heartening, we have no doubts that further research
will help increasing safety, to a point where it is safe
enough. Together, researchers will have to come up
with a definition of what ”safe enough” even means,
and only the future can tell whether or not it will ever
be completely safe.
5 FUTURE WORK
Considering the already mentioned importance of
safety and security, it will be necessary for the auto-
mobile industry to adopt some sort of safety standards
for the AVs perception models, just as one would con-
sider standards for seat belts. As the topic we are try-
ing to concretize are quite more complex than seat
belts, there is a dire need for a solid test environment,
e.g., it needs to be measurable for how many frames
an AE actually tricks a camera, and whether or not
angle has any influence.
We are working on creating a framework which
can help to define these standards. Instead of testing
with an expensive AV, we plan to build a model of an
AV by means of following hardware components:
• Leo Rover Developer Kit 2, to have something
driveable to mount the sensors on
• A sufficiently high resolution camera
• A LiDAR sensor
• Signal processing and computational hardware
Our suggested pipeline of the data follows that of
(Jahromi et al., 2019) and considers the processing
tasks as follows: First camera video frames and the
depth channel information from the LiDAR are sent
to a Deep Neural Network (DNN) to do the object de-
tection and road segmentation, since DNNs such as a
Fully Convolutional Network (FCN) have shown bet-
ter accuracy for computer vision tasks compared to
ML (Jahromi et al., 2019).
The second step is to overlaying the point cloud
from the LiDAR with the fused data, before feeding
the output to the control layer of the AV. The entire
pipeline of the data can be seen in Fig. 3. This will
set a foundation for testing possible attacks to see if
the AV drives as expected or deviates.
6 CONCLUSION
We are moving towards a future, where we will soon
see driverless cars available to the common consumer.
It is necessary to secure the safety and well-being of
the consumers, as well as earn their trust. To do this,
the AVs need to outperform human driving, which
first and foremost require that the car can build a reli-
able model of its surrounding, before the higher level
algorithms can navigate the AVs. This requires sen-
sor data that are valid and sensors resistant to attacks,
so adversaries cannot manipulate them to cause ac-
cidents. We have given our resume of the literature
concerning attacks on cameras and LiDAR, two major
factors in the current perception models, and also the
IoTBDS 2023 - 8th International Conference on Internet of Things, Big Data and Security
138

two sensors most often combined together in MSF.
We have discussed these and their countermeasures in
depth, before reviewing them in the context of MSF.
We have opened a discussion into attack complex-
ity and suggested a framework to review them in to
better grasp the challenging factors of this issue. It
is clear that more countermeasures are needed, how-
ever advancements in MSF are looking very promis-
ing, and some of the state-of-the-art solutions will be
a huge leap in making attacks too complex to be fea-
sible. It is still important to keep in mind that since
everyone, including heads-of-state, will be driving
around in these cars, complexity alone cannot be seen
as a sufficient. Solid standards need to be adopted.
REFERENCES
Burke, K. (2019). How Does a Self-Driving Car
See? https://blogs.nvidia.com/blog/2019/04/15/how-
does-a-self-driving-car-see/, Accessed 2023-01-19.
Cameron, O. (2017). An Introduction to LIDAR: The Key
Self-Driving Car Sensor — by Oliver Cameron —
Voyage. Voyage.
Cao, Y., Wang, N., Xiao, C., Yang, D., Fang, J., Yang, R.,
Chen, Q. A., Liu, M., and Li, B. (2021). Invisible
for both Camera and LiDAR: Security of multi-sensor
fusion based perception in autonomous driving under
physical-world attacks. In Proc. - IEEE Symp. Secur.
Priv., volume 2021-May, pages 176–194.
Cao, Y., Zhou, Y., Chen, Q. A., Xiao, C., Park, W., Fu, K.,
Cyr, B., Rampazzi, S., and Morley Mao, Z. (2019).
Adversarial sensor attack on LiDAR-based perception
in autonomous driving. In Proc. ACM Conf. Comput.
Commun. Secur., pages 2267–2281.
Deng, Y., Zhang, T., Lou, G., Zheng, X., Jin, J., and Han,
Q. L. (2021). Deep Learning-Based Autonomous
Driving Systems: A Survey of Attacks and Defenses.
IEEE Trans. Ind. Informatics.
Eykholt, K., Evtimov, I., Fernandes, E., Li, B., Rahmati,
A., Tram
`
er, F., Prakash, A., Kohno, T., and Song,
D. (2018a). Physical adversarial examples for object
detectors. In 12th USENIX Work. Offensive Technol.
WOOT 2018, co-located with USENIX Secur. 2018.
Eykholt, K., Evtimov, I., Fernandes, E., Li, B., Rahmati,
A., Xiao, C., Prakash, A., Kohno, T., and Song, D.
(2018b). Robust Physical-World Attacks on Deep
Learning Visual Classification. In Proc. IEEE Com-
put. Soc. Conf. Comput. Vis. Pattern Recognit., pages
1625–1634.
Jahromi, B. S., Tulabandhula, T., and Cetin, S. (2019).
Real-time hybrid multi-sensor fusion framework for
perception in autonomous vehicles. Sensors (Switzer-
land), 19(20).
Jones, D. (2022). California Approves A Pi-
lot Program For Driverless Rides : NPR.
https://www.npr.org/2021/06/05/1003623528/
california-approves-pilot-program-for-driverless-
rides, Accessed 2023-01-10.
Kocic, J., Jovicic, N., and Drndarevic, V. (2018). Sensors
and Sensor Fusion in Autonomous Vehicles. In 2018
26th Telecommun. Forum, TELFOR 2018 - Proc.
Liu, J. and Park, J. (2021). ”Seeing is not Always Believ-
ing”: Detecting Perception Error Attacks Against Au-
tonomous Vehicles. IEEE Trans. Dependable Secur.
Comput.
Matsumura, R., Sugawara, T., and Sakiyama, K. (2018). A
secure LiDAR with AES-based side-channel finger-
printing. In Proc. - 2018 6th Int. Symp. Comput. Netw.
Work. CANDARW 2018, pages 479–482.
Neal, A. (2018). LiDAR vs. RADAR.
https://www.fierceelectronics.com/ components/lidar-
vs-radar, Accessed 2023-01-19.
Petit, F. (2022). What are the 5 levels of autonomous
driving? - Blickfeld. https://www.blickfeld.com/
blog/levels-of-autonomous-driving/, Accessed 2023-
01-14.
Petit, J., Stottelaar, B., Feiri, M., and Kargl, F. (2015). Re-
mote Attacks on Automated Vehicles Sensors: Exper-
iments on Camera and LiDAR. Blackhat.com, pages
1–13.
Qayyum, A., Usama, M., Qadir, J., and Al-Fuqaha, A.
(2020). Securing Connected Autonomous Vehicles:
Challenges Posed by Adversarial Machine Learning
and the Way Forward. IEEE Commun. Surv. Tutori-
als, 22(2):998–1026.
Roriz, R., Cabral, J., and Gomes, T. (2022). Automotive
LiDAR Technology: A Survey. IEEE Trans. Intell.
Transp. Syst., 23(7):6282–6297.
Shin, H., Kim, D., Kwon, Y., and Kim, Y. (2017). Illu-
sion and dazzle: Adversarial optical channel exploits
against lidars for automotive applications. In Lect.
Notes Comput. Sci. (including Subser. Lect. Notes Ar-
tif. Intell. Lect. Notes Bioinformatics), volume 10529
LNCS, pages 445–467.
Tencent Keen Security Lab (2019). Experimental Se-
curity Research of Tesla Autopilot. page 38.
https://keenlab.tencent.com/en/whitepapers/Experi-
mental
Security Research of Tesla Autopilot.pdf,
Accessed 2023-01-13.
Xu, D., Anguelov, D., and Jain, A. (2018). PointFusion:
Deep Sensor Fusion for 3D Bounding Box Estima-
tion. In Proc. IEEE Comput. Soc. Conf. Comput. Vis.
Pattern Recognit., pages 244–253.
Zhou, H., Li, W., Kong, Z., Guo, J., Zhang, Y., Yu, B.,
Zhang, L., and Liu, C. (2020). Deepbillboard: Sys-
tematic physical-world testing of autonomous driving
systems. In Proc. - Int. Conf. Softw. Eng., pages 347–
358.
Analysis of Sensor Attacks Against Autonomous Vehicles
139
