
Learning Less Generalizable Patterns for Better Test-Time Adaptation
Thomas Duboudin
1
, Emmanuel Dellandr
´
ea
1
, Corentin Abgrall
2
, Gilles H
´
enaff
2
and Liming Chen
1
1
Univ. Lyon,
´
Ecole Centrale de Lyon, CNRS, INSA Lyon, Univ. Claude Bernard Lyon 1,
Univ. Louis Lumi
`
ere Lyon 2, LIRIS, UMR5205, 69134 Ecully, France
2
Thales LAS France SAS, 78990
´
Elancourt, France
Keywords:
Domain Generalization, Out-of-Domain Generalization, Test-Time Adaptation, Shortcut Learning, PACS,
Office-Home.
Abstract:
Deep neural networks often fail to generalize outside of their training distribution, particularly when only a
single data domain is available during training. While test-time adaptation has yielded encouraging results in
this setting, we argue that to reach further improvements, these approaches should be combined with training
procedure modifications aiming to learn a more diverse set of patterns. Indeed, test-time adaptation methods
usually have to rely on a limited representation because of the shortcut learning phenomenon: only a subset of
the available predictive patterns is learned with standard training. In this paper, we first show that the combined
use of existing training-time strategies and test-time batch normalization, a simple adaptation method, does
not always improve upon the test-time adaptation alone on the PACS benchmark. Furthermore, experiments
on Office-Home show that very few training-time methods improve upon standard training, with or without
test-time batch normalization. Therefore, we propose a novel approach that mitigates the shortcut learning
behavior by having an additional classification branch learn less predictive and generalizable patterns. Our
experiments show that our method improves upon the state-of-the-art results on both benchmarks and benefits
the most to test-time batch normalization.
1 INTRODUCTION
Deep neural networks’ performance falls sharply
when confronted, at test-time, with data coming from
a different distribution (or domain) than the training
one. A change in lighting, sensor, weather conditions
or geographical location can result in a dramatic per-
formance drop (Hoffman et al., 2018; Beery et al.,
2018; DeGrave et al., 2021). Such environmental
changes are commonly encountered when an embed-
ded network is deployed in the wild and exist in such
diversity that it is impossible to gather enough data to
cover all possible domain shifts. This lack of cross-
domain robustness prevents the widespread deploy-
ment of deep networks in safety-critical applications.
Domain generalization algorithms have been investi-
gated to mitigate the test-time performance drop by
modifying the training procedure. Contrary to the do-
main adaptation research field, no information about
the target domain is assumed to be known in domain
generalization. Most of the existing works assume to
have access to data coming from several identified dif-
ferent domains and try to create a domain invariant
representation by finding common predictive patterns
(Li et al., 2018b; Moyer et al., 2018; Carlucci et al.,
2019; Li et al., 2018a; Krueger et al., 2020; Huang
et al., 2020). However, such an assumption is quite
generous, and in many real-life applications, one does
not have access to several data domains but only a sin-
gle one. As a result, some works study single-source
domain generalization (Wang et al., 2021b; Shi et al.,
2020; Zhao et al., 2020; Zhang et al., 2022b; Nam
et al., 2021). However, most methods were found
to perform only marginally better than the standard
training procedure when the evaluation is done rigor-
ously on several benchmarks (Gulrajani and Lopez-
Paz, 2021; Zhang et al., 2022a). Another recent
paradigm, called test-time adaptation, proposes to use
a normally trained network and adapt it with a quick
procedure at test-time, using only a batch of unlabeled
target samples. This paradigm yielded promising re-
sults in the domain generalization setting (You et al.,
2021; Yang et al., 2022) because they alleviate the
main challenges of domain generalization: the lack of
information about the target domain and the require-
ment to be simultaneously robust in advance to every
possible shift.
However, test-time adaptation methods suffer
Duboudin, T., Dellandréa, E., Abgrall, C., Hénaff, G. and Chen, L.
Learning Less Generalizable Patterns for Better Test-Time Adaptation.
DOI: 10.5220/0011893800003417
In Proceedings of the 18th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2023) - Volume 5: VISAPP, pages
349-358
ISBN: 978-989-758-634-7; ISSN: 2184-4321
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
349
from a drawback that limits their adaptation capabil-
ity, and which can only be corrected at training-time.
Indeed, using a standard training procedure, only a
subset of predictive patterns is learned, corresponding
to the most obvious and efficient ones, while the less
predictive patterns are disregarded entirely (Singla
et al., 2021; Hermann and Lampinen, 2020; Pezeshki
et al., 2020; Hermann et al., 2020; Shah et al., 2020;
Beery et al., 2018; Geirhos et al., 2020). This appar-
ent flaw, named shortcut learning, originates from the
gradient descent optimization (Pezeshki et al., 2020)
and prevents a test-time method from using all the
available patterns. The combination of a training-
time patterns diversity-seeking approach with a test-
time adaptation method may thus lead to improved
results. In this paper, we show that the combined use
of test-time batch normalization with the state-of-the-
art single-source domain generalization methods does
not systematically yield increased results on the PACS
benchmark (Li et al., 2017) in the single-source set-
ting, despite them being designed to seek normally ig-
nored patterns. Similar experiments on Office-Home
(Venkateswara et al., 2017) yield a similar result, with
only a few methods performing better than the stan-
dard training procedure.
We thus propose a new method, called L2GP,
which encourages a network to learn more semanti-
cally different predictive patterns than the standard
training procedure. To find such different patterns, we
propose to look for predictive patterns that are less
predictive than the naturally learned ones. By defi-
nition, these patterns enable correct predictions on a
subset of the training data but not on all the others
and are, thus, less generalizable on the training dis-
tribution. These less generalizable patterns match the
ones normally ignored because of the simplicity bias
of deep networks that promotes the learning of a rep-
resentation with a high generalization capability on
the training distribution (Huh et al., 2021; Galanti and
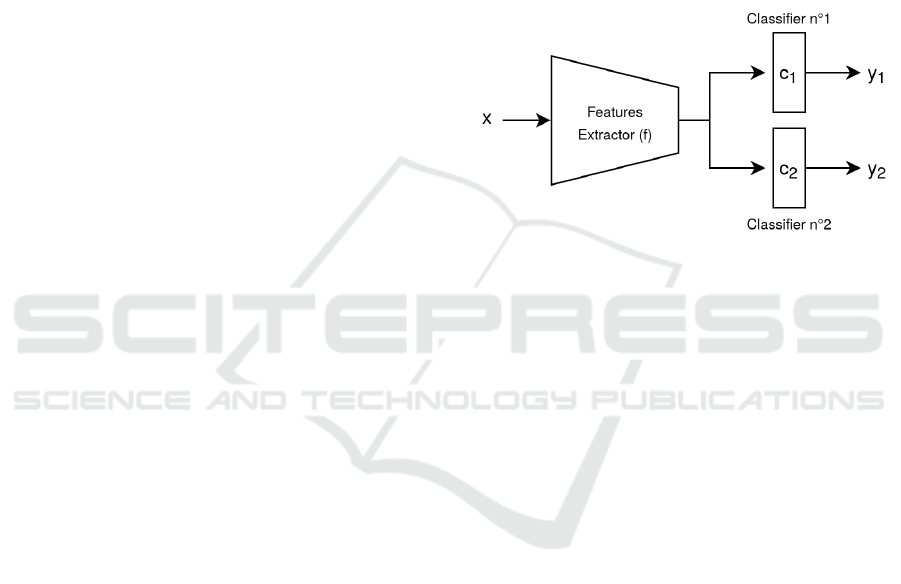
Poggio, 2022). Our method requires two classifiers
added to a features extractor. They are trained asym-
metrically: one is trained normally (with the stan-
dard cross-entropy classification loss only), and the
other with both a cross-entropy loss and an additional
shortcut avoidance loss. This loss slightly encourages
memorization rather than generalization by learning
batch-specific patterns, i.e. patterns that lower the loss
on the running batch but with a limited effect on the
other batches of data. The features extractor is trained
with respect to both classification branches.
To summarize, our contribution is threefold:
• To the best of our knowledge, we are the first to in-
vestigate the effect of training-time single-source
methods on a test-time adaptation strategy. We
show that it usually does not increase performance
and can even have an adverse effect.
• We apply, for the first time, several state-of-the-art
single-source domain generalization algorithms
on the more challenging and rarely used Office-
Home benchmark and showed that very few yield
a robust cross-domain representation.
• We propose an original algorithm to learn a larger
than usual subset of predictive features. We show
that it yields results competitive or over the state-
of-the-art with the combination of test-time batch
normalization.
Figure 1: Schema of our bi-headed architecture. The nam-
ing convention is the same as the one used in algorithm 1.
2 RELATED WORKS
2.1 Single-Source Domain
Generalization
Most domain generalization algorithms require sev-
eral identified domains to enforce some level of dis-
tributional invariance. Because this is an unrealistic
hypothesis in some situations (such as in healthcare
or defense-related tasks), methods were developed to
deal with a domain shift issue with only one single
domain available during training. Some of them rely
on a domain shift invariance hypothesis. A commonly
used invariance hypothesis is the texture shift hypoth-
esis. Indeed, many domain shifts are primarily tex-
tures shifts, and using style-transfer-based data aug-
mentation will improve the generalization. It can be
done explicitly by training a model on stylized im-
ages (Wang et al., 2021b; Jackson et al., 2019) or im-
plicitly in the internal representation of the network
(Zhang et al., 2022b; Nam et al., 2021). Such meth-
ods are limited to situations where it is indeed a shift
of the hypothesized nature that is encountered. Oth-
ers wish to learn a larger set of predictive patterns to
make the network more robust should one or several
training-time predictive patterns be missing at test-
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
350

Algorithm 1: Learning Less Generalizable Patterns (L2GP).
1 Method specific hyper-parameters:
2 - weight for the shortcut avoidance loss α
3 - step size used for the gradient perturbation lr
+
4 Networks:
5 - features extractor f , and its weights W (ResNet18 without its last linear layer)
6 - first classifier c
1
(single linear layer)
7 - second classifier c
2
(single linear layer)
8 while training is not over do
9 sample 2 batches of data {(x
i
, y
i
), i = 0...N − 1}, {(˜x
i
, ˜y
i
), i = 0...N − 1}
10 calculate the cross-entropy loss L on the first batch for both branches on the original weights W :
11 L ( f , c
1
) =
1
N
∑
i
L [c
1
( f (W, x
i
)), y
i
]
12 L ( f , c
2
) =
1
N
∑
i
L [c
2
( f (W, x
i
)), y
i
]
13 calculate the gradient of the cross-entropy loss L w.r.t W on the first batch:
14 ∇
W
L = ∇
W
1
N
∑
i
L [c
2
( f (W, x
i
)), y
i
]
15 add the perturbation to the running weight W , and track this addition in the computational graph:
16 W
+
= W + lr
+
∇
W
L
17 calculate the shortcut avoidance loss on the second batch:
18 L
sa
( f , c
2
) =
1
N
∑
i
||c
2
( f (W, ˜x
i
)) − c
2
( f (W
+
, ˜x
i
))||
1
19 update all networks to minimize L
total
( f , c
1
, c
2
) =
1
2
(L ( f , c
1
) + L ( f , c
2
)) + αL
sa
( f , c
2
)
20 end
21 At test-time: use c
1
◦ f (discard c
2
) combined with test-time batch normalization
time. (Volpi et al., 2018) and (Zhao et al., 2020) pro-
pose to incrementally add adversarial images crafted
to maximize the classification error of the network to
the training dataset. These images no longer contain
the original obvious predictive patterns, which then
forces the learning of new patterns. These strategies
are inspired by adversarial training methods (Huang
et al., 2015; Kurakin et al., 2016) that were originally
designed to improve adversarial robustness in deep
networks. (Wang et al., 2021b) used a similar ap-
proach in an online fashion, without the impractical
ever-growing training dataset, and combined it with
a style augmentation approach. (Huang et al., 2020)
and (Shi et al., 2020) used a dropout-based (Srivas-
tava et al., 2014) strategy to prevent the network from
relying only on the most predictive patterns by mut-
ing the most useful channels or mitigating the texture
bias. These methods were evaluated in the single-
source setting on several benchmarks, including the
very common PACS dataset.
2.2 Test-Time Adaptation
Test-time adaption has emerged as a promising
paradigm to deal with domain shifts. Waiting to
gather information about the target domain, in the
shape of an unlabeled batch of samples (or even a
single sample), alleviates the main drawbacks of
training-time domain generalization methods: the
lack of information about the target domain, and
the necessity to simultaneously adapt to all possible
shifts. The simplest test-time adaptation strategy
consists of replacing the training-time statistics in the
batch normalization layers with the running test batch
statistics. It is now a mandatory algorithm block for
almost all methods (Nado et al., 2020; Benz et al.,
2021; You et al., 2021; Hu et al., 2021; Schneider
et al., 2020). This strategy was originally designed
to deal with test-time image corruptions but proved
to be efficient in a more general domain shift setting
(You et al., 2021; Yang et al., 2022). In a situation
where samples of a test batch cannot be assumed
to come from the same distribution, workarounds
requiring a single sample were developed by mixing
test-time and training-time statistics (You et al.,
2021; Yang et al., 2022; Hu et al., 2021; Schneider
et al., 2020), or by using data augmentation (Hu
et al., 2021). Some solutions, such as the work of
(Yang et al., 2022) or (Wang et al., 2021a), further
rely on test-time entropy minimization to remove
inconsistent features from the prediction. Finally,
(Zhang et al., 2021) quickly adapt a network to make
consistent predictions between different augmenta-
tions of the same test sample. All these strategies
rely on a model trained with the standard training
procedure.
Learning Less Generalizable Patterns for Better Test-Time Adaptation
351

3 METHOD
Our approach requires two classification layers
plugged after the same features extractor: one will
be tasked with learning the patterns that are nor-
mally learned (as they are not necessarily spurious
and, therefore, should not be systematically ignored),
and the other the normally ”hidden” ones. This
lightweight modification of the standard architecture,
illustrated in figure 1, is compatible with many net-
works and tasks. The primary branch, consisting
in the features extractor and the primary classifier,
is trained to minimize the usual cross-entropy loss
(algo.1, lines 11). The secondary one is trained
to minimize the cross-entropy loss (algo.1, line 12)
alongside a novel shortcut avoidance loss. The com-
plete procedure is available in algorithm 1.
If we are able to update a model in a direction
that lowers the loss value on a certain batch of data,
but does not produce a similar decrease on another
batch of the same distribution, it means that the pat-
terns learned are both predictive as they lower the
loss and generalize poorly, i.e. they are less predic-
tive. These are precisely the patterns we are look-
ing for. Our shortcut avoidance loss follows this idea.
We first compute a new set of weights for the sec-
ondary branch by applying a single cross-entropy gra-
dient ascent step to the branch weights (algo.1, lines
13-16). The gradient is computed on the original run-
ning batch, already used for the cross-entropy losses.
We, then, compare the predictions of the secondary
branch with the current weights and the computed al-
tered weights (algo.1, lines 17-18). This difference in
predictions constitutes our shortcut avoidance loss.
Our approach requires the sampling of two
batches of data simultaneously because the shortcut
avoidance loss is computed on a batch of data differ-
ent from the one used to compute the applied gradient.
As the features learned in the applied gradient gener-
alize from one batch of data to the other, the altered
weights’ predictions are a lot less accurate than the
running weights’ predictions (cross-entropy gradient
ascent). As a result, these predictions differ greatly.
By training the secondary branch to minimize the gap
between both predictions, we are pushing the weights
toward an area in which the applied gradient does not
change the network’s secondary output. This would
mean that the patterns extracted for the second batch
are different from the ones learned in the applied gra-
dient. By adding the cross-entropy loss to the train-
ing procedure, we are driving the network to learn
weights that are both predictive for the running clas-
sification batch but that have a low effect on the pre-
dictions of another batch and are, hence, less predic-
tive. Note that the running network’s weights are opti-
mized with regard to both sides of the shortcut avoid-
ance loss. The addition of the gradient must thus be
tracked in the computational graph. This is akin to the
MAML (Finn et al., 2017) meta-learning framework
in which the starting point of a few optimization steps
is itself optimized.
During the evaluation, only the first classifier is
used, and the secondary one can be discarded. In-
deed, the first classifier uses every available feature at
its disposal, including those learned by the secondary
branch, while the secondary branch only favors less
simple features. Furthermore, we use test-time batch
normalization (abbreviated as TTBN). This method
has been chosen because of its simplicity and its wide
range of applicability. We do not use the usual expo-
nential average training mean and standard deviation
(computed during training) in the batch normalization
layers. Instead, we first calculate the statistics on the
running test batch and use them to update an expo-
nential average of the test statistics, as in (Nado et al.,
2020; Benz et al., 2021; You et al., 2021; Hu et al.,
2021; Schneider et al., 2020), before using this esti-
mate to normalize the features. A correct target statis-
tics approximation can be reached only if all samples
encountered at test-time come from the same data dis-
tribution. This is a realistic scenario for applications
like autonomous driving, in which the data distribu-
tion is not expected to change over the course of a
few consecutive images. Several methods (You et al.,
2021; Hu et al., 2021) provide ways to circumvent
this issue if needed.
4 EXPERIMENTS AND RESULTS
4.1 Baselines for Comparison and
Experimental Setup
We compare our approach with the standard train-
ing procedure (expected risk minimization, abbrevi-
ated ERM), with several methods designed for single-
source domain generalization (Wang et al., 2021b;
Zhang et al., 2022b; Nam et al., 2021; Volpi et al.,
2018; Zhao et al., 2020; Shi et al., 2020), with Spec-
tral Decoupling (Pezeshki et al., 2020), a method de-
signed to reduce the shortcut-learning phenomenon in
deep networks, and with RSC (Huang et al., 2020),
and InfoDrop (Shi et al., 2020), that are domain gen-
eralization algorithms which do not explicitly require
several training domains. These baselines were se-
lected because they yield state-of-the-art results, are
representative of the main ideas in the single-source
domain generalization research community, and be-
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
352
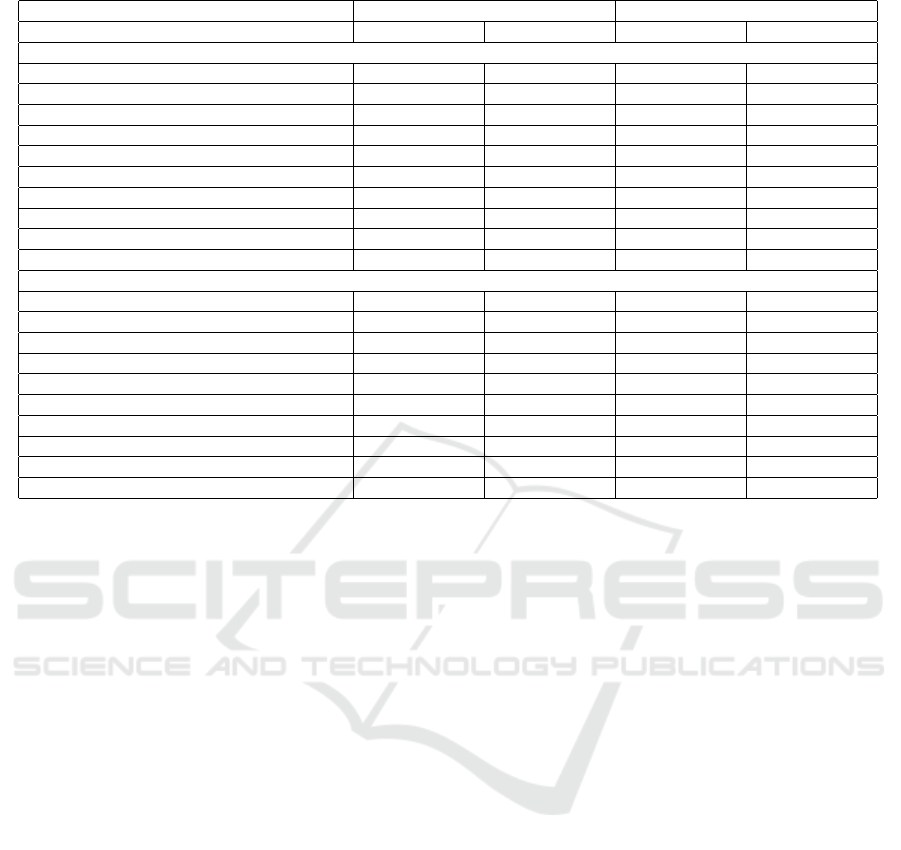
Table 1: Performances of our approach and comparison with the state-of-the-art.
without TTBN with TTBN
Method Avg. Val. Acc. Avg. Test Acc. Avg. Val. Acc. Avg. Test Acc.
PACS dataset
ERM 96.8 ± 0.4 52.0 ± 1.9 97.4 ± 0.3 66.1 ± 1.1
RSC (Huang et al., 2020) 97.7 ± 0.4 54.3 ± 1.8 97.2 ± 0.2 58.7 ± 1.6
InfoDrop (Shi et al., 2020) 96.6 ± 0.3 53.4 ± 2.0 95.9 ± 0.3 65.5 ± 1.0
ADA (Volpi et al., 2018) 96.9 ± 0.8 55.9 ± 2.9 96.6 ± 1.1 66.5 ± 1.2
ME-ADA (Zhao et al., 2020) 96.7 ± 1.3 54.7 ± 3.1 96.5 ± 0.9 66.7 ± 2.0
EFDM (Zhang et al., 2022b) 96.9 ± 0.5 59.6 ± 2.3 97.5 ± 0.5 71.3 ± 1.0
SagNet (Nam et al., 2021) 97.2 ± 0.7 57.9 ± 2.9 97.8 ± 0.7 62.4 ± 1.8
L.t.D (Wang et al., 2021b) 97.9 ± 1.0 59.9 ± 2.7 97.6 ± 0.7 66.3 ± 1.5
Spectral Decoupling (Pezeshki et al., 2020) 95.9 ± 0.4 52.9 ± 2.6 96.2 ± 0.7 66.7 ± 1.1
L2GP (ours) 98.6 ± 0.2 56.1 ± 2.7 96.4 ± 0.3 71.3 ± 0.6
Office-Home dataset
ERM 82.0 ± 0.8 52.0 ± 0.8 81.6 ± 1.1 52.6 ± 0.6
RSC (Huang et al., 2020) 80.9 ± 0.4 49.2 ± 0.7 80.2 ± 0.5 48.9 ± 0.7
InfoDrop (Shi et al., 2020) 76.4 ± 0.8 45.9 ± 0.5 77.1 ± 0.7 46.4 ± 0.6
ADA (Volpi et al., 2018) 81.2 ± 2.6 50.4 ± 0.9 80.3 ± 2.0 50.0 ± 0.7
ME-ADA (Zhao et al., 2020) 78.9 ± 1.4 49.8 ± 0.6 81.4 ± 1.2 50.0 ± 0.7
EFDM (Zhang et al., 2022b) 82.9 ± 0.5 52.8 ± 0.6 83.3 ± 1.0 53.3 ± 0.5
SagNet (Nam et al., 2021) 81.5 ± 1.5 51.9 ± 0.7 81.1 ± 1.1 51.8 ± 0.9
L.t.D (Wang et al., 2021b) 81.0 ± 1.2 50.9 ± 0.7 81.7 ± 2.7 51.2 ± 0.8
Spectral Decoupling (Pezeshki et al., 2020) 83.8 ± 0.7 52.5 ± 0.5 82.5 ± 0.6 53.2 ± 0.3
L2GP (ours) 84.0 ± 0.6 53.4 ± 0.6 83.8 ± 0.5 54.5 ± 0.3
cause they have a publicly available implementa-
tion. This was a necessity as the original works’
results were given without any test-time adaptation,
and trained models were not provided. Our experi-
ments are conducted on the PACS (7 classes, 4 do-
mains, around 10k images in total), and the Office-
Home (65 classes, 4 domains, around 15k images in
total) benchmarks. PACS has already been used in the
single-source setting in several works, but not Office-
Home.
For a classification task, using a ResNet (He
et al., 2016), our architectural changes break down
to adding a single fully connected layer after the aver-
age pooling layer, next to the original last classifica-
tion layer. To avoid a target domain information leak,
the models selected for the test are those with the best
validation accuracy. Furthermore, we chose to use the
same common hyper-parameters for all baselines to
precisely measure the effect of the training procedure
modifications rather than the influence of a perhaps
better than usual hyper-parameter. This change of
hyper-parameters and differences in the model selec-
tion process are responsible for some inconsistencies
between the results reported in the original works and
ours (such as with SagNet (Nam et al., 2021): 61.9%
average accuracy on PACS in the original work, 57.9
in our own). Further experimental details, including
common hyper-parameters and hyper-parameters se-
lected for our approach and the comparison baselines,
are available in the supplementary material.
4.2 Results and Analysis
Our main results are available in table 1. The re-
ported results are the mean, over the 12 distinct pairs
of training and test domains, of the averages and stan-
dard deviations, over 3 runs, of the validation and
test accuracies. More details about the precise cal-
culation process are given in the supplementary ma-
terial. Used alongside test-time batch normalization,
our method reaches a performance similar to that of
EFDM (Zhang et al., 2022b) on the PACS datasets
but exceeds it on the Office-Home datasets. When
test-time batch normalization is not used, our method
remains state-of-the-art on the Office-Home dataset
but falls behind the style-transfer-based methods on
the PACS dataset by a noticeable margin. Besides,
our approach also benefits the accuracy on the valida-
tion sets.
We observe a completely different behavior be-
tween experiments on PACS and Office-Home. While
all the existing methods improve upon the standard
training procedure (ERM) on PACS, only EFDM,
spectral decoupling (Pezeshki et al., 2020), and our
method yield better results on Office-Home. Like-
wise, while always positive, the effect of the test-
time batch normalization is much more noticeable on
PACS than on Office-Home. Furthermore, it is in-
teresting to notice that the performance gain due to
the test-time batch normalization is highly dependant
on the training-time method used. Indeed, the gain is
Learning Less Generalizable Patterns for Better Test-Time Adaptation
353

Table 2: Ablation study.
without TTBN with TTBN
Ablation Avg. Val. Acc. Avg. Test Acc. Avg. Val. Acc. Avg. Test Acc.
PACS dataset
Double branch only (A) 96.8 ± 0.6 53.4 ± 2.6 96.4 ± 0.3 67.4 ± 0.8
Detached loss term (B) 97.5 ± 0.1 52.6 ± 2.3 97.3 ± 0.3 68.2 ± 1.3
Secondary prediction branch (C) 98.0 ± 0.1 53.4 ± 2.8 96.9 ± 0.2 70.1 ± 0.4
Single branch (D) 92.8 ± 1.1 46.4 ± 4.9 93.0 ± 0.9 51.2 ± 5.1
Complete method 98.6 ± 0.2 56.1 ± 2.7 96.4 ± 0.3 71.3 ± 0.6
Office-Home dataset
Double branch only (A) 82.7 ± 0.4 52.8 ± 0.5 82.6 ± 0.3 53.5 ± 0.4
Detached loss term (B) 83.5 ± 0.7 52.7 ± 0.6 82.3 ± 0.6 54.0 ± 0.6
Secondary prediction branch (C) 81.3 ± 0.4 53.9 ± 0.7 83.8 ± 0.6 54.8 ± 0.5
Single branch (D) 82.6 ± 0.7 53.7 ± 0.4 82.0 ± 0.5 54.3 ± 0.5
Complete method 84.0 ± 0.6 53.4 ± 0.6 83.8 ± 0.5 54.5 ± 0.3
the highest when our approach or ERM is used and
only reaches a result closely similar to ERM or below
in most of the other cases. We hypothesize that the
domain shifts of the PACS datasets are mostly tex-
tures shifts, while they are not for the Office-Home
datasets. This would explain why test-time batch nor-
malization yields a large improvement on the PACS
benchmark: the simple use of test-time statistics, that
encode textures (Benz et al., 2021), is enough to sig-
nificantly bridge the domain gap. It would also ex-
plain why the methods reaching the highest results
(Zhang et al., 2022b; Nam et al., 2021; Wang et al.,
2021b) in the usual setting (without test-time batch
normalization) are all style-transfer-based methods.
As our approach is not related to style transfer in
any way, we are able to reach a higher accuracy on
Office-Home than other existing works. Regarding
the effect of different training-time methods, we hy-
pothesize that the magnitude of the gain is related to
whether the method is really learning a more diverse
set of patterns or rather only weighting differently pat-
terns that would also be learned naturally. This would
explain why several methods that improve upon ERM
without test-time batch normalization only perform
precisely as well once it is used. Style-transfer-based
methods, for instance, essentially grant a higher im-
portance to shape-based patterns rather than texture-
based patterns but not necessarily learn new patterns.
We also conducted an extensive ablation study
to understand and demonstrate the necessity of our
choices. As a sanity check, we first study the α = 0
situation: a single features extractor on which two
classification layers are plugged in, trained only
with the cross-entropy on the same batch at each
iteration for both branches (line A in the table 2).
The differences in initialization of the classifiers
may have an implicit ensembling effect, as in MIMO
(Havasi et al., 2021), which could lead to a better out-
of-distribution generalization without the need for
the shortcut avoidance loss. This experiment yields a
small increase of performance on both benchmarks,
but it remains far below our approach, whose gain is,
therefore, not coming from an implicit ensembling
mechanism. We also study the effect of detaching
from the computational graph the c
2
( f (W, ˜x
i
)) term
(not optimizing the features extractor with respect
to this part of the loss) in the shortcut avoidance
loss (line B), as this could lead to a substantial
improvement in memory consumption, and as the
simultaneous optimization on both terms in not
needed per se to decrease the generalization ability
of the network. This experiment shows a decreased
performance as well. The detachment most likely
only results in a slower learning as the constraint’s
gradient pushes in the reverse direction of the classifi-
cation loss gradient. This behavior is prevented when
the features extractor is optimized with regard to both
terms of the regularization: pushing in the reverse
direction of the classification gradient will only slide
the difference in the parameter space but not shorten
the gap. Then, to show that the performance gain
is effectively linked to a mitigation of the shortcut
learning phenomenon, we conduct two experiments.
Firstly, we study the impact of using the secondary
prediction branch at test-time rather than the primary
one (line C). This experiment results in performances
fairly similar to the first branch, only lower in
validation. This was to be expected as the secondary
branch is precisely trained so that it generalizes less
on the training domain. Secondly, we study the
effect of applying our shortcut avoidance loss on
an architecture without the added secondary branch
(line D). The shortcut avoidance loss is thus applied
to the original classifier. The results show a dramatic
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
354

Figure 2: Mean absolute difference for ERM and our approach.
drop in accuracy on the PACS dataset but not on the
Office-Home dataset. This difference is most likely
due to the higher diversity in Office-Home, which
prevents the original patterns from being ignored.
To further show the effect of our loss, we track
during training a measure of the diversity of the
learned patterns for both our approach and ERM. In-
spired by (Ayinde et al., 2019), we use the mean ab-
solute difference (MAD) between normalized convo-
lutional filters f (or neurons for fully connected lay-
ers) of a certain layer, computed over all layers L of
size N
L
and training domains D, for an epoch t, fol-
lowing the equation 1. The results are available in
figure 2 and show a systematic increase in the diver-
sity of the learned patterns for our approach compared
to ERM, for both benchmarks. Finally, as the tun-
ing of hyper-parameters in the domain generalization
setting is a critical issue, we conduct a broad hyper-
parameters sensitivity analysis, available in the sup-
plementary material in table 3. Our study shows a
relatively low sensitivity and a large match between
hyper-parameters fit for all training-test pairs of PACS
and Office-Home.
MAD(t) =
∑
D
∑
L
1
N
L
2
∑
i, j
|| f
t,D,L,i
− f
t,D,L, j
||
1
(1)
5 CONCLUSION
In this paper, we investigated the behavior of dif-
ferent single-source methods when used in conjunc-
tion with test-time batch normalization on the PACS
and Office-Home benchmarks. We showed that test-
time batch normalization always has a positive, yet
highly variable, influence and that, most of the time,
the addition of a training-time method is superfluous.
We hypothesized that this lack of additional perfor-
mance was linked to the selection behavior of some
algorithms, which still learn the same subset of pat-
terns as the standard training, but weigh them dif-
ferently. We thus proposed a novel approach learn-
ing normally ”hidden” patterns by looking for pre-
dictive patterns that generalize less. We showed that
it yielded state-of-the-art results on both benchmarks
and benefits the most to test-time batch normalization.
Future work will be dedicated to a better understand-
ing of the origin of this test-time batch normalization
variability and to experiments with our method on the
DomainBed (Gulrajani and Lopez-Paz, 2021) bench-
mark.
ACKNOWLEDGEMENTS
This work was in part supported by the 4D Vision
project funded by the Partner University Fund (PUF),
a FACE program, as well as the French Research
Agency, l’Agence Nationale de Recherche (ANR),
Learning Less Generalizable Patterns for Better Test-Time Adaptation
355

through the projects Learn Real (ANR-18-CHR3-
0002-01), Chiron (ANR-20-IADJ-0001-01), Aristo-
tle (ANR-21-FAI1-0009-01), and the joint support of
the French national program of investment of the fu-
ture and the regions through the PSPC FAIR Waste
project.
REFERENCES
Ayinde, B. O., Inanc, T., and Zurada, J. M. (2019). Regu-
larizing deep neural networks by enhancing diversity
in feature extraction. IEEE Transactions on Neural
Networks and Learning Systems.
Beery, S., Van Horn, G., and Perona, P. (2018). Recognition
in terra incognita. In IEEE/CVF European conference
on computer vision.
Benz, P., Zhang, C., Karjauv, A., and Kweon, I. S. (2021).
Revisiting batch normalization for improving corrup-
tion robustness. In IEEE/CVF Winter Conference on
Applications of Computer Vision.
Carlucci, F. M., D’Innocente, A., Bucci, S., Caputo, B., and
Tommasi, T. (2019). Domain generalization by solv-
ing jigsaw puzzles. In IEEE/CVF Conference on Com-
puter Vision and Pattern Recognition.
DeGrave, A. J., Janizek, J. D., and Lee, S.-I. (2021). Ai for
radiographic covid-19 detection selects shortcuts over
signal. Nature Machine Intelligence.
Finn, C., Abbeel, P., and Levine, S. (2017). Model-agnostic
meta-learning for fast adaptation of deep networks. In
International Conference on Machine Learning.
Galanti, T. and Poggio, T. (2022). Sgd noise and implicit
low-rank bias in deep neural networks. arXiv preprint
arXiv:2206.05794.
Geirhos, R., Jacobsen, J.-H., Michaelis, C., Zemel, R.,
Brendel, W., Bethge, M., and Wichmann, F. A. (2020).
Shortcut learning in deep neural networks. Nature
Machine Intelligence.
Gokhale, T., Anirudh, R., Thiagarajan, J. J., Kailkhura, B.,
Baral, C., and Yang, Y. (2022). Improving diversity
with adversarially learned transformations for domain
generalization. arXiv preprint arXiv:2206.07736.
Gulrajani, I. and Lopez-Paz, D. (2021). In search of lost
domain generalization. In International Conference
on Learning Representations.
Havasi, M., Jenatton, R., Fort, S., Liu, J. Z., Snoek, J., Lak-
shminarayanan, B., Dai, A. M., and Tran, D. (2021).
Training independent subnetworks for robust predic-
tion. In International Conference on Learning Repre-
sentations.
He, K., Zhang, X., Ren, S., and Sun, J. (2016). Deep resid-
ual learning for image recognition. In IEEE/CVF Con-
ference on Computer Vision and Pattern Recognition.
Hermann, K., Chen, T., and Kornblith, S. (2020). The ori-
gins and prevalence of texture bias in convolutional
neural networks. Advances in Neural Information
Processing Systems.
Hermann, K. and Lampinen, A. (2020). What shapes
feature representations? exploring datasets, architec-
tures, and training. Advances in Neural Information
Processing Systems.
Hoffman, J., Tzeng, E., Park, T., Zhu, J.-Y., Isola, P.,
Saenko, K., Efros, A., and Darrell, T. (2018). Cy-
cada: Cycle-consistent adversarial domain adaptation.
In International Conference on Machine Learning.
Hu, X., Uzunbas, G., Chen, S., Wang, R., Shah, A., Nevatia,
R., and Lim, S.-N. (2021). Mixnorm: Test-time adap-
tation through online normalization estimation. arXiv
preprint arXiv:2110.11478.
Huang, R., Xu, B., Schuurmans, D., and Szepesv
´
ari, C.
(2015). Learning with a strong adversary. arXiv
preprint arXiv:1511.03034.
Huang, Z., Wang, H., Xing, E. P., and Huang, D. (2020).
Self-challenging improves cross-domain generaliza-
tion. In IEEE/CVF European Conference on Com-
puter Vision.
Huh, M., Mobahi, H., Zhang, R., Cheung, B., Agrawal, P.,
and Isola, P. (2021). The low-rank simplicity bias in
deep networks. arXiv preprint arXiv:2103.10427.
Jackson, P. T., Abarghouei, A. A., Bonner, S., Breckon,
T. P., and Obara, B. (2019). Style augmentation: data
augmentation via style randomization. In IEEE/CVF
Conference on Computer Vision and Pattern Recogni-
tion Workshops.
Krueger, D., Caballero, E., Jacobsen, J.-H., Zhang, A., Bi-
nas, J., Priol, R. L., and Courville, A. (2020). Out-of-
distribution generalization via risk extrapolation (rex).
arXiv preprint arXiv:2003.00688.
Kurakin, A., Goodfellow, I. J., and Bengio, S. (2016). Ad-
versarial machine learning at scale. In International
Conference on Learning Representations.
Li, D., Yang, Y., Song, Y.-Z., and Hospedales, T. M. (2017).
Deeper, broader and artier domain generalization. In
IEEE/CVF International Conference on Computer Vi-
sion.
Li, D., Yang, Y., Song, Y.-Z., and Hospedales, T. M.
(2018a). Learning to generalize: Meta-learning for
domain generalization. In Thirty-Second AAAI Con-
ference on Artificial Intelligence.
Li, H., Jialin Pan, S., Wang, S., and Kot, A. C. (2018b).
Domain generalization with adversarial feature learn-
ing. In IEEE/CVF Conference on Computer Vision
and Pattern Recognition.
Moyer, D., Gao, S., Brekelmans, R., Galstyan, A., and
Ver Steeg, G. (2018). Invariant representations with-
out adversarial training. In Advances in Neural Infor-
mation Processing Systems.
Nado, Z., Padhy, S., Sculley, D., D’Amour, A., Lak-
shminarayanan, B., and Snoek, J. (2020). Eval-
uating prediction-time batch normalization for ro-
bustness under covariate shift. arXiv preprint
arXiv:2006.10963.
Nam, H., Lee, H., Park, J., Yoon, W., and Yoo, D. (2021).
Reducing domain gap by reducing style bias. In
IEEE/CVF Conference on Computer Vision and Pat-
tern Recognition.
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
356

Pezeshki, M., Kaba, S.-O., Bengio, Y., Courville, A., Pre-
cup, D., and Lajoie, G. (2020). Gradient starvation: A
learning proclivity in neural networks. arXiv preprint
arXiv:2011.09468.
Schneider, S., Rusak, E., Eck, L., Bringmann, O., Bren-
del, W., and Bethge, M. (2020). Improving robustness
against common corruptions by covariate shift adap-
tation. Advances in Neural Information Processing
Systems.
Shah, H., Tamuly, K., Raghunathan, A., Jain, P., and Ne-
trapalli, P. (2020). The pitfalls of simplicity bias in
neural networks. In Advances in Neural Information
Processing Systems.
Shi, B., Zhang, D., Dai, Q., Zhu, Z., Mu, Y., and Wang, J.
(2020). Informative dropout for robust representation
learning: A shape-bias perspective. In International
Conference on Machine Learning.
Singla, S., Nushi, B., Shah, S., Kamar, E., and Horvitz, E.
(2021). Understanding failures of deep networks via
robust feature extraction. In IEEE/CVF Conference on
Computer Vision and Pattern Recognition.
Srivastava, N., Hinton, G., Krizhevsky, A., Sutskever, I.,
and Salakhutdinov, R. (2014). Dropout: A simple way
to prevent neural networks from overfitting. Journal
of Machine Learning Research.
Venkateswara, H., Eusebio, J., Chakraborty, S., and Pan-
chanathan, S. (2017). Deep hashing network for un-
supervised domain adaptation. In IEEE/CVF Confer-
ence on Computer Vision and Pattern Recognition.
Volpi, R., Namkoong, H., Sener, O., Duchi, J. C., Murino,
V., and Savarese, S. (2018). Generalizing to unseen
domains via adversarial data augmentation. In Ad-
vances in Neural Information Processing Systems.
Wang, D., Shelhamer, E., Liu, S., Olshausen, B., and Dar-
rell, T. (2021a). Tent: Fully test-time adaptation by
entropy minimization. In International Conference on
Learning Representations.
Wang, Z., Luo, Y., Qiu, R., Huang, Z., and Baktashmot-
lagh, M. (2021b). Learning to diversify for single do-
main generalization. In IEEE/CVF International Con-
ference on Computer Vision.
Xu, Z., Liu, D., Yang, J., Raffel, C., and Niethammer, M.
(2021). Robust and generalizable visual representa-
tion learning via random convolutions. In Interna-
tional Conference on Learning Representations.
Yang, T., Zhou, S., Wang, Y., Lu, Y., and Zheng, N.
(2022). Test-time batch normalization. arXiv preprint
arXiv:2205.10210.
You, F., Li, J., and Zhao, Z. (2021). Test-time batch statis-
tics calibration for covariate shift. arXiv preprint
arXiv:2110.04065.
Zhang, M. M., Levine, S., and Finn, C. (2021). Memo: Test
time robustness via adaptation and augmentation. In
NeurIPS 2021 Workshop on Distribution Shifts: Con-
necting Methods and Applications.
Zhang, X., Zhou, L., Xu, R., Cui, P., Shen, Z., and
Liu, H. (2022a). Nico++: Towards better bench-
marking for domain generalization. arXiv preprint
arXiv:2204.08040.
Zhang, Y., Li, M., Li, R., Jia, K., and Zhang, L. (2022b).
Exact feature distribution matching for arbitrary style
transfer and domain generalization. In IEEE/CVF
Conference on Computer Vision and Pattern Recog-
nition.
Zhao, L., Liu, T., Peng, X., and Metaxas, D. (2020).
Maximum-entropy adversarial data augmentation for
improved generalization and robustness. Advances in
Neural Information Processing Systems.
SUPPLEMENTARY MATERIAL
Results Details
The results were obtained as follows:
• For the 12 distinct pairs of training and test do-
mains, we calculate the average and the standard
deviation of the validation and test accuracies over
3 runs with different random seeds (because the
effect of the network’s initialization on the test ac-
curacy is greater than usual in a test-time domain
shift situation).
• The reported numbers are the non-weighted mean
over all distinct pairs of the average accuracies per
training-test pair previously computed ± the mean
over all distinct pairs of the pairwise standard de-
viation (as we are interested in the randomness of
the initialization rather than the variation of accu-
racies between training-test pairs).
Hyper-parameters Details
Data: for all the methods and benchmarks, we use
the data augmentation described in (Huang et al.,
2020) (random resized crops, color jitter, random
horizontal flips, random grayscale). For a particular
domain used in training, 90% of the dataset is used
for training and the remaining 10% for validation.
The test set is obtained using another domain dataset
entirely.
Common Hyper-parameters: experiments were
conducted with a ResNet18 (He et al., 2016) trained
for 100 epochs, with the stochastic gradient descent,
a learning rate of 1e − 3, a batch size of 64, a weight
decay of 1e − 5, and a Nesterov momentum of 0.9.
After 80 epochs, the learning rate is divided by 10.
The exponential average momentum used in the
batch normalization layers at test-time is set to 0.1.
L2GP (ours): the gradient ascent learning rate lr
+
is
set to 1.0 and the α weight for the shortcut avoidance
loss to 1.0 as well, for all the experiments, that is,
Learning Less Generalizable Patterns for Better Test-Time Adaptation
357
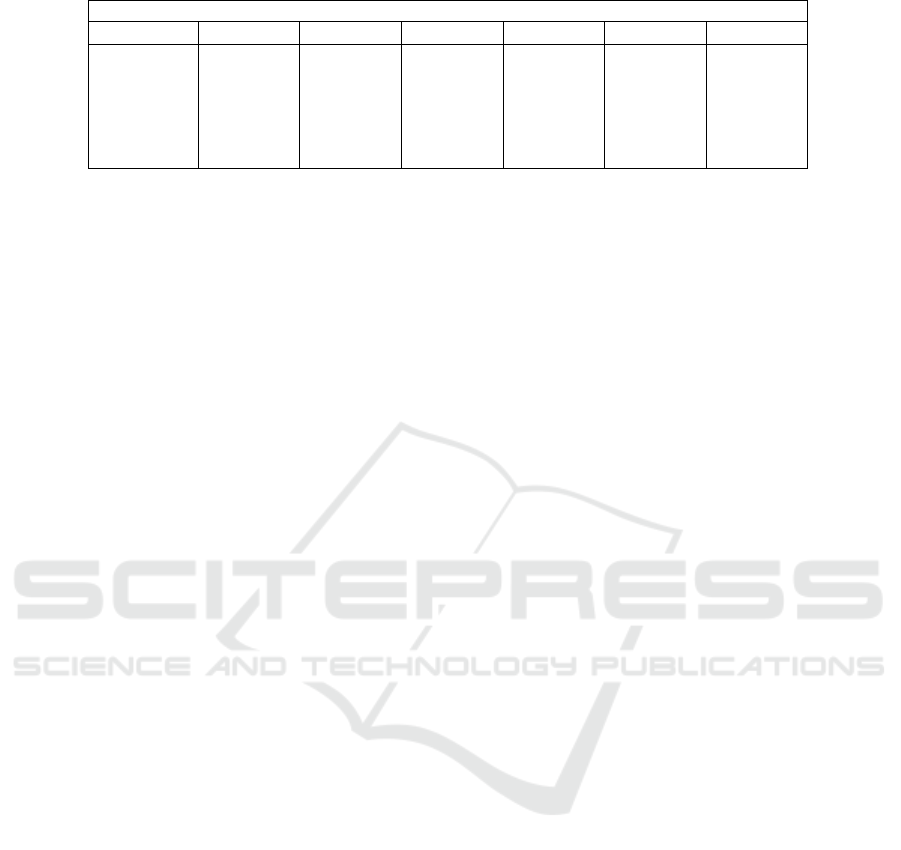
Table 3: Broad hyper-parameters sensitivity analysis.
Avg. test Acc. on PACS - Avg. test Acc. on Office-Home
lr
+
↓ / α → 10
−3
10
−2
0.1 1.0 10.0 100.0
10
−3
66.9 - 53.7 66.8 - 53.1 67.7 - 53.2 67.0 - 53.5 67.4 - 53.2 68.5 - 53.7
10
−2
67.8 - 53.2 67.8 - 53.1 67.6 - 53.3 67.7 - 52.4 68.6 - 53.9 70.6 - 53.2
0.1 67.8 - 53.0 67.5 - 53.2 67.4 - 53.3 69.5 - 53.8 71.3 - 54.7 69.2 - 51.9
1.0 67.1 - 53.3 68.0 - 53.4 69.0 - 53.8 71.3 - 54.4 70.3 - 52.6 20.1 - 49.9
10.0 67.8 - 52.9 67.2 - 53.4 67.4 - 53.3 66.0 - 53.9 54.4 - 51.9 15.0 - 5.2
100.0 66.2 - 53.2 67.9 - 53.4 67.4 - 53.4 67.8 - 53.3 60.5 - 53.2 14.5 - 2.0
for all the training-test pairs on both the PACS and
the Office-Home datasets. These hyper-parameters
were first set arbitrarily to plausible values and then
confirmed to be effective on the PACS benchmark
by looking at target performance. They were fi-
nally reused as is on the Office-Home benchmark.
This hyper-parameters selection strategy may seem
sub-optimal but is, in fact, more and more used in
domain generalization problems (Gokhale et al.,
2022; Xu et al., 2021): a method requiring a new and
careful hyper-parameters setting for each new dataset
encountered is impractical, even more so when the
target data distribution is unknown and cannot thus
be used to help the setting.
Comparison baselines specifics hyper-parameters are
detailed below. For the experiments on the PACS
datasets, on which most of the baselines were tested,
we use the same hyper-parameters as in the original
works. For the Office-Home datasets, we used
the hyper-parameters of the multi-source setting if
available. If the methods did not have quantitative
hyper-parameters, such as EFDM (Zhang et al.,
2022b) with the choice of mixing-layers depths, we
used the ones proposed for the PACS experiments for
the ones on Office-Home. Likewise, if no rigorous
hyper-parameters setting strategy was detailed in the
original work, we used the PACS hyper-parameters
for experiments on Office-Home. Finally, for the
Spectral Decoupling work that was never evaluated
on neither PACS nor Office-Home, we conducted
a simple hyper-parameters search using a single
training-test domains pair, and transferred them as is
to the other pairs with the same training domain.
RSC: the percentage of channels (or spatial cross-
channel locations) to be dropped is initialized at
30% and is increased every 10 epochs linearly to
reach 90% for the last ten. Spatial cross-channel
locations dropout and channel all-locations dropout
are applied in a mutually exclusive way with the
same probability. All samples in a batch are subject
to dropout.
InfoDrop: half the layers are subjected to the
info-dropout. The dropout rate is set to 1.5, the
temperature to 0.1, the bandwidth to 1.0, and the
radius to 3.
ADA: the number of adversarial gradient ascent steps
is set to 25, and the learning rate for the adversarial
gradient ascent steps is set to 50. The γ and η factors
are respectively set to 10.0 and 50.0. Adversarial
images are added to the training set every 10 epoch.
ME-ADA: The same hyper-parameters as the ones
above are used.
EFDM: the EFDMix layers are inserted after the first
3 residual blocks in the ResNet architecture.
SagNet: The randomization stage and the adversarial
weight of SagNets are fixed to 3 and 0.1 for all
experiments, as in the original work. A gradient
clipping to 0.1 is applied to the adversarial loss.
L.t.D: α
1
and α
2
weights for the additional losses
were set to 1.0, β to 0.1, for all experiments.
Spectral Decoupling: the weight of the spectral de-
coupling constraint (an L2-norm on the network’s out-
put) is set to 0.001 for experiments on Office-Home
Experiments, and to 0.01 for experiments on PACS.
VISAPP 2023 - 18th International Conference on Computer Vision Theory and Applications
358
