
Automatic Defect Detection in Sewer Network Using Deep Learning
Based Object Detector
Bach Ha
1
, Birgit Schalter
2
, Laura White
1
and Joachim K
¨
ohler
1
1
NetMedia, Fraunhofer IAIS, Schloss Birlinghoven 1, 53757 Sankt Augustin, Germany
2
Dr.-Ing. Pecher und Partner Ingenieurgesellschaft mbH, Sachsendamm 93, 10829 Berlin, Germany
Keywords:
Object Detection, Automatic Defect Detection, Sewer Inspection, AI Based Process Optimization.
Abstract:
Maintaining sewer systems in large cities is important, but also time and effort consuming, because visual
inspections are currently done manually. To reduce the amount of aforementioned manual work, defects within
sewer pipes should be located and classified automatically. In the past, multiple works have attempted solving
this problem using classical image processing, machine learning, or a combination of those. However, each
provided solution only focus on detecting a limited set of defect/structure types, such as fissure, root, and/or
connection. Furthermore, due to the use of hand-crafted features and small training datasets, generalization is
also problematic. In order to overcome these deficits, a sizable dataset with 14.7 km of various sewer pipes
were annotated by sewer maintenance experts in the scope of this work. On top of that, an object detector
(EfficientDet-D0) was trained for automatic defect detection. From the result of several expermients, peculiar
natures of defects in the context of object detection, which greatly effect annotation and training process, are
found and discussed. At the end, the final detector was able to detect 83% of defects in the test set; out of the
missing 17%, only 0.77% are very severe defects. This work provides an example of applying deep learning-
based object detection into an important but quiet engineering field. It also gives some practical pointers on
how to annotate peculiar ”object”, such as defects.
1 INTRODUCTION
Sewer systems in large cities require continuous enor-
mous amounts of maintenance; for example, in Berlin
650 km of sewer pipes must be inspected each year.
This inspection process is done by domain experts
viewing video recordings of pipe interiors and mark-
ing defects manually. Consequently, such a process is
time-consuming, tedious, and error-prone. In order to
reduce the amount of necessitated manual effort, mul-
tiple previous works attempted to automatically de-
fects using classical image processing methods, and
rudimentary machine learning on hand-crafted fea-
tures (Makar, 1999). As a result, each work is limited
to only one or two specific type of defects. General-
ization to changes in appearance of defects and back-
ground is also another potential issue. While classi-
cal image processing based works’ result are promis-
ing, they are not yet enough for practical use on the
field. On the other hand, modern deep-learning based
works have also been developed as an attempt to solve
this task. While delivering good results, networks
from these works are trained and evaluated on rel-
atively small datasets (Cheng and Wang, 2018; Ku-
mar et al., 2020). Consequently, generalization, or
how networks behave to variation in inputs, is a po-
tential problem. In order to deal with the aforemen-
tioned deficits, this work aimed to develop an auto-
matic deep learning (DL) based defect detector, which
is trained and evaluated on a new sizable and varied
dataset. This detector’s architecture is Efficient-Det
D0 (Tan et al., 2020). Beside automatic evaluation,
the final evaluation is also done by expert engineers
in the field, thus providing a thorough and practical
report on the network’s performance. This paper is di-
vided into five main sections. Related work provides a
brief overview on the current status of automatic de-
fects detection in sewer systems, and deep learning
based vision object detection. The second section ex-
plains methodology, as well as accompanying prob-
lems for data acquisition, annotation, network train-
ing, and evaluation. Next are the result section, future
works section, and finally the conclusion.
188
Ha, B., Schalter, B., White, L. and Köhler, J.
Automatic Defect Detection in Sewer Network Using Deep Learning Based Object Detector.
DOI: 10.5220/0011986300003497
In Proceedings of the 3rd International Conference on Image Processing and Vision Engineering (IMPROVE 2023), pages 188-198
ISBN: 978-989-758-642-2; ISSN: 2795-4943
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)

2 RELATED WORK
This section gives more details on previous works in
the field of sewer maintenance that attempted to solve
the same problem and their deficits. In addition, a
short overview on deep-learning based object detec-
tions is also provided.
2.1 Sewer Maintenance
In order to efficiently inspect inaccessible sewer
systems multiple non-destructive diagnostic methods
have been developed since at least 1981 (Makar,
1999). While systems making use of sensors, such as
ground penetrating radars, ultrasound, laser-scanner
(Duran et al., 2002; Bailey et al., 2011) have
been developed and applied, closed-circuit television
(CCTV) based methods (Makar, 1999) are more pop-
ular due to the intuitive nature of the data, which
can be manually analyzed by technicians. Earlier
CCTV based methods (Moselhi and Shehab-Eldeen,
1999; Sinha, 2000; Sinha et al., 1999; Yang and Su,
2008) made use of classical image processing such
as edge detection, or boundary segmentation to de-
tect the present of defects on pipes’ inner surface,
and perform feature extraction. After that, classifica-
tion of defects are done either by using heuristic from
fixed extracted features (size, diameters, etc.) (Sinha,
2000; M
¨
uller and Fischer, 2009; Huynh et al., 2015;
Tung-Ching, 2015) or various machine learning tech-
nics, for example neural network (NN) (Moselhi and
Shehab-Eldeen, 1999; Hassan et al., 2019), fuzzy-
neural network (Sinha et al., 1999), radial basis net-
work (RBN), and support vector machine (SVM)
(Yang and Su, 2008; Hengmeechai, 2013). While
producing results, these classical/hybrid methods re-
quire careful choices and configurations of image pre-
processing methods based on defined target types of
defects. In consequence, each resulting solution is
limited to one or two very specific types of defect (i.e.
fissure, joint open, root). Furthermore, hand-crafted
configurations make the solution inflexible to varia-
tions in environments, and defects. Another problem
is that most of them depend on edge detection, which
make defects with similar forms, for example fissure
and root, not differentiable. In recent years, such
shortcomings could potentially be solved using arti-
ficial neural networks (ANN). Although neural net-
works were already mentioned and used, these net-
works are still working on top of hand-crafted fea-
ture vectors, thus continue to be limited by the orig-
inal configuration. An explanation for such deci-
sions was the lack of computational power (Moselhi
and Shehab-Eldeen, 1999; Yang and Su, 2008) at the
time. A more recent paper (Hassan et al., 2019) has
been able to perform classification directly on RGB
input images, however a technician is required to
control the camera view and locate potential defects.
Recently, thanks to advancements in hardware, con-
cerns over performance issues of neural networks are
less relevant. Which leads to the existence of mul-
tiple methods using complex deep neural networks
(DNN) (Kunzel et al., 2018; Cheng and Wang, 2018;
Kumar et al., 2020; Wang et al., 2021), which not
only classify but also localize defects simultaneously.
These newer methods feed camera images directly
into a FasterRCNN (Cheng and Wang, 2018; Kumar
et al., 2020; Wang et al., 2021), or YOLOv3 (Ku-
mar et al., 2020) object detection network, which pro-
duces bounding boxes representing location and clas-
sification of defects. However, these deep-learning
based methods used relatively small datasets, which
only focus on a small set of defects (fissure, root, in-
filtration, deposit), for training and evaluation. An-
other problem is that, these earlier network only pro-
vided a perspective view of part of detected defects or
complex defect system, which would not allow easy
automatic measurement and damage assessment. An-
other type of DNN that performs image segmentation,
namely FRRN (Kunzel et al., 2018), was also used in
an effort to detect sewer pipes’ defects. This method
however projects raw video images into a single 2D
unrolling of the pipe, similar to (M
¨
uller and Fischer,
2009), which is then fed to the FRRN for segmenta-
tion. Regardless, the segmentation network from this
work has problem with overlapping defects.
2.2 DL Based Vision Object Detection
Detecting objects in RGB images produced by CCTV
is a suitable task for deep learning based object detec-
tors. These detectors are a subset of DNN, which spe-
cialize in localizing and classifying objects on visual
data, such as RGB images. There are currently three
main groups of such detectors, namely two-stage de-
tectors, one-stage detectors (Zhao et al., 2019), and
recently developed transformer-based detectors.
Two-stage detectors are networks such as FastR-
CNN (Girshick, 2015), or FasterRCNN (Ren et al.,
2015). These networks function somewhat similar to
classical image processing methods, by first locating
region of interests (ROI), each of which is the location
of a potential object. Next, classification is performed
on each ROI to get the object class. Thanks to the sep-
aration of localization and classification functionality,
two-stage detectors can reliably provide accurate ob-
ject location and class. Two-stages networks’ training
process are also more stable and easier to control, be-
Automatic Defect Detection in Sewer Network Using Deep Learning Based Object Detector
189
cause the localization part and classification part can
be trained separately. In return, they are slower and
require a more complicated training process.
On the other hand, one-stage detectors, such as
networks from the YOLO-family (Redmon et al.,
2016; Redmon and Farhadi, 2018), Single-Shot-
Detector (SSD) (Liu et al., 2016), or the EfficientDet-
family (Tan et al., 2020), trade training stability for
better performance and a simpler training process by
performing both localization and classification simul-
taneously. Being a unified calculation graph allowed
these networks to be optimized on lower software and
hardware level, thus greatly increasing their process-
ing speed. The same characteristic however makes
it difficult to improve the localization and classifica-
tion separately, since both parts have to be trained
together. Earlier one-stage detectors generally have
lower accuracy than two-stage detectors, however this
is no longer always true for newer iterations (Zhao
et al., 2019; Wang et al., 2022a).
The third and final group, transformer detectors
are recently introduced networks, which makes use
of attention mechanism instead of pure convolutional
layers. One of the first and most famous network
of this group is DETR (Carion et al., 2020). Since
then transformer-based detectors have consistently
produced highly accurate detections, and one of them
(Wang et al., 2022b) is currently at the top of the
COCO benchmark (Lin et al., 2014). However, these
networks are extremely large and much slower in
comparison to networks in the other two groups. Fur-
thermore, the required amount of data for training
them is also very high.
3 METHOD
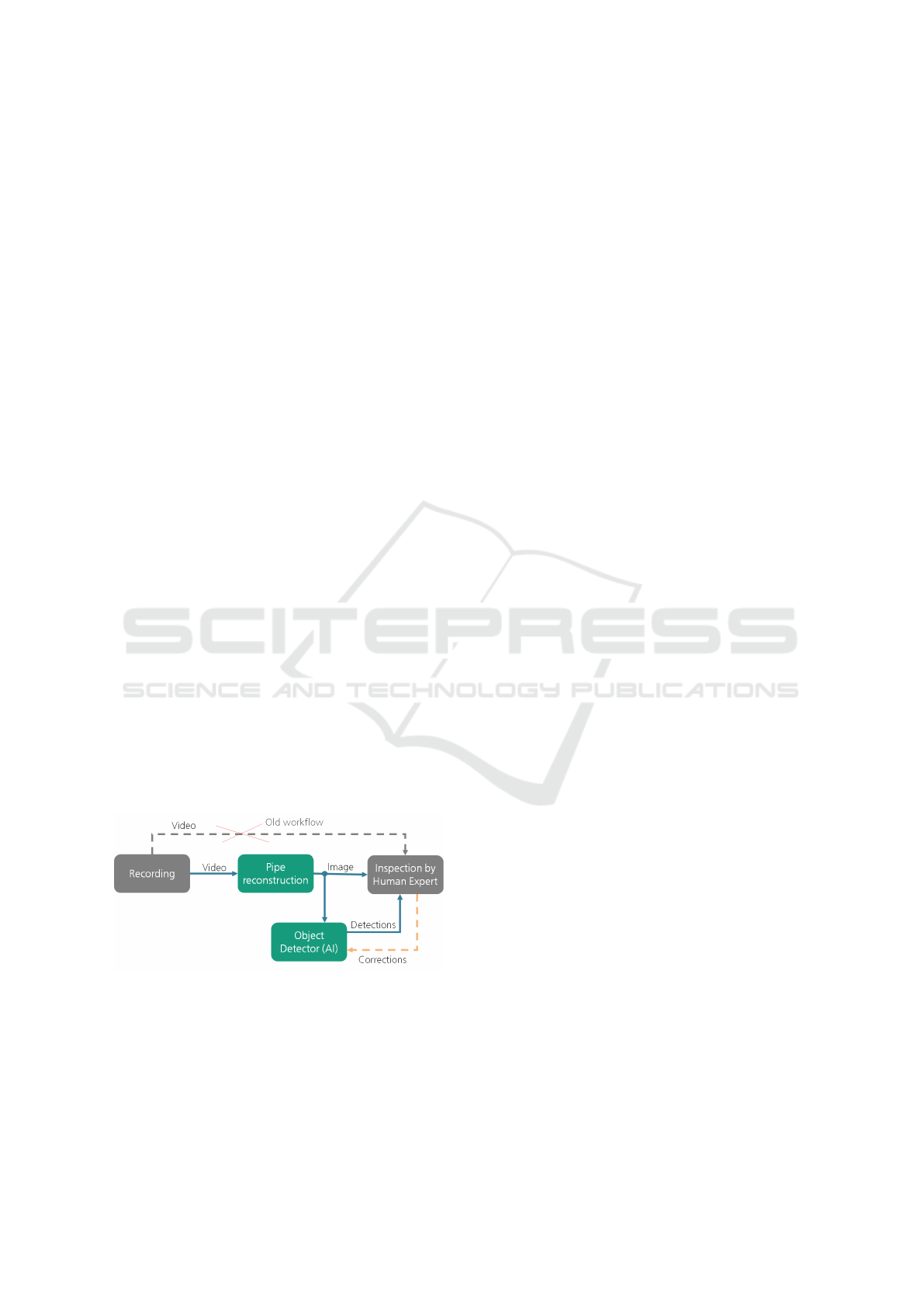
Figure 1: New inspection workflow with automatic object
detector integration.
To satisfy the use-case, the to be designed solution has
to adhere to the following requirements. Firstly, the
system must allow technicians to pinpoint the location
of defects, as well as providing them with an overall
and clear view of defects. Secondly, produced detec-
tions should allow an accurate measurement of defect
size and length (i.e. of fissures, and root). The third
requirement is that the annotation process for training
data should not be complicated and extremely time-
consuming. Next, the system should require minimal
controlling effort and time on site, avoiding closing
off the street for a long period of time. Finally, pro-
cessing of recorded video data should be efficient and
done in a reasonable amount of time without the need
of expensive computation clusters.
With the aforementioned requirements in mind,
the following design choices were made. In order
to fulfill the first and second requirements, the net-
work will not work directly on video frames, but
on unrolled 2D projections of pipes’ inner surface,
which was similarly done in (M
¨
uller and Fischer,
2009; Kunzel et al., 2018). This method also re-
duces the amount of images, that have to be pro-
cessed by the neural network, because near identical
frames from camera recordings are eliminated. The
third and fourth requirements rule out the application
of segmentation neural networks in (Kunzel et al.,
2018). Because of the complexity and required ac-
curacy of segmentation masks, labeling at pixel level
is very time-consuming (Cordts et al., 2016) in com-
parison to drawing bounding boxes over defects. Seg-
mentation networks are also generally slower and re-
quire more computational resources in comparison to
bounding box (BB) based detectors. Therefore, BB-
based object detectors would be the more suitable
choice. The last two requirements directly exclude
transformer based networks, and favor single-stage
detectors over two-stages detectors; with the type of
detector narrowed down, there is still the choice of
the specific network architecture, such as SSD, Reti-
naNet (Lin et al., 2017), YOLO-Family, or Efficient-
Det. EfficientDet was chosen, because at the time
it was the current state-of-the-art (Tan et al., 2020).
However, it should be noted that newer versions of
YOLO (YOLOv5, YOLOv7 (Wang et al., 2022a)) are
also promising.
3.1 Dataset Acquisition and Annotation
Problems
For the purpose of training the chosen neural network,
a sewer defects detection dataset is constructed from
maintenance fisheye videos of Berlin’s sewer system.
Before anything else is done, each video is unrolled
and stitched into a single W × 1200 RGB image using
the method described in (Kunzel et al., 2018). The
width W of each output image depends on the length
of each inspected pipe. With the RGB input for the
network secured, the next important step is obtain-
IMPROVE 2023 - 3rd International Conference on Image Processing and Vision Engineering
190

Figure 2: Visualization of data within the pipeline.
ing bounding box annotations. For this step, a set of
9 common defects and 1 structure element similar to
(Kunzel et al., 2018) is defined. Defects include set-
tled deposits (BBC), break/collapse (BAC), deforma-
tion (BAA), obstacle (BBE), angular displaced joint
(BAJ C), surface damage (BAF), horizontal displaced
joint (BAJ B), fissure (BAB), and root (BBA). While
structure element only consist of one class: connec-
tion (BCA). Name of all defects/structure are taken
from the English translation of the German standard:
”DIN EN 13508-2:2011-08” (DIN, 2011). While the
accompanied letter codes are from the Euronorm. In
total, the dataset includes 14.7 km of annotated sewer
pipes.
Figure 3: Distribution of defect types.
Beside the known large amount of effort needed to
annotate a machine learning dataset, the defects in this
dataset also introduce their own additional problems.
Although defined as an object detection dataset, un-
like COCO(Lin et al., 2014) or KITTI(Geiger et al.,
2012) datasets, the task of drawing a box over an
object and assigning a class to it for this dataset is
not as straight forward, which cost a lot of time and
necessitated multiple iterations of annotations. The
main cause is the uncommon and sometime ambigu-
ous nature of defects within sewer pipes. Unlike nat-
ural objects such as cat, dog, or car, which mostly re-
quire only common sense, defects require training and
experience to be accurately diagnosed. This means
that the labeling process has to be carried out only
by maintenance experts to ensure higher annotations
quality. With that in mind, in order to accelerate the
labeling process, the first iteration of annotation was
done by letting experts work in parallel on different
sewer pipes. That was a wrong decision that lead
to the failure of the first iteration of annotation, in
which produced labels for defects are so inconsistent
that neural network become more confused after the
training. The first problem is that, even to experts,
some defects are still ambiguous. In another word
some experts might classify an ”object” as a defect,
while others do not, which further confirms the find-
ing made in (M
¨
uller et al., 2006). The second problem
is deciding on a way to draw bounding boxes con-
sistently, which sensibly represents relevant ”object”.
Specifically, this is a problem with annotating fissure,
root, and surface damage. Thinking back to objects in
COCO or KITTI; although color, size, and orientation
of these objects are varied, they all have certain fixed
shape, form, or ratio and can be separated into single
instances (for example, a cat, a dog, a bike, ...). On
the other hand, fissure, root, and erosion exist mostly
in form of clusters, which can be of any shape, size,
and density. Therefore, it is not trivial to intuitively
define an ”instance” for these defects, which can then
be surrounded by a box. Without a consistent and uni-
fied guideline, each expert labeled these clusters with
different levels of coarseness, further exacerbating the
level of inconsistency in the dataset. Therefore, it is
clear that common labeling rules must be set. From
analyzing existing labels, there are two possible di-
rections to annotate such defects. The first direction
is to coarsely label each entire region of connected
defects within a single bounding box. The other di-
rection is to finely divide each cluster into multiple
smaller ”instances”, each of which is labeled by a
bounding box. Here, smaller instance is loosely de-
fined as the largest continuous segments of defects,
which can be fitted into a tight bounding box, that has
high ”defect to background” area ratio. Examples in
figure 4 help show the difference between these two
aforementioned labeling directions.
Although finely divided labels do seem excessive
in the example, this inconvenience is outweighed by
more precise detections. Preliminary training and
testing on a subset of the dataset shows that network
trained with coarse labels is unable to detect smaller
and finer fissures, roots, and erosion areas. In con-
trast, networks trained with finely divided clusters
are capable of detecting not only smaller defects but
Automatic Defect Detection in Sewer Network Using Deep Learning Based Object Detector
191

Figure 4: Examples for how fissures could be labeled, either
coarsely (top) or finely (bottom).
also larger defect clusters. While detection of such
large clusters are represented with a lot of smaller
overlapping bounding boxes, that is still much bet-
ter than completely missing defects, especially when
these smaller boxes can later be combined using vari-
ous post-processing methods.
With all this hindsight, in order to deal with the
ambiguous factor of defects and variations in label-
ing style, a second round of annotations was done fol-
lowing a stricter labeling guideline, with all experts
working together as a single group and vote on every
annotated defect. As a result, the annotations from
the second round are empirically more consistent. Fi-
nally, with large problems of the dataset sorted out,
the next step is to train the neural network.
3.2 Neural Network Training
This subsection describes main steps and correspond-
ing configuration to train the required detector. As
reasoned in the beginning of this section 3, a net-
work from the EfficientDet family (Tan et al., 2020)
was trained to detect defects and structures within
sewer pipes, specifically EfficientDet-D0 was used.
The training follows a standard procedure of multiple
steps.
Firstly, the whole dataset is split into a train set
and a test set. For large public datasets, splits are often
already chosen and provided (Lin et al., 2014; Geiger
et al., 2012). When that is not the case, splits are
generally generated randomly from the whole dataset.
For such a new and self labeled dataset, random split
was a decent choice, which costs little time and effort.
However, results of the first few cross validations on
random test sets shown large and chaotic variations,
where the network achieves really high accuracy in
some rounds while completely failing to recognize se-
vere defects in others. After further inspecting those
automatic splits, it was found that due to difference in
rarity of each defect type and sewer pipe conditions,
characteristics of each random split changed drasti-
cally. For example, there are splits, where the major-
ity of break/collapse or obstacle are concentrated in
the test set, thus the network is tested on defects that
it was hardly trained on. On the other hand, the test
set could mostly consist of healthy pipes, in which
the network easily detected most of the scattered de-
fects. In both cases, these networks are all incompa-
rable, and the evaluation untrustworthy due to a lack
of stable baselines. Therefore, a set of ten representa-
tive sewer pipes were instead manually chosen and set
aside for evaluation. For clarity, representative means
that these pipes must contain all the relevant defects
and structure with good variation. Furthermore, pipes
with defect free sections are also included to make
sure that the resulting network does not wrongly mark
healthy pipe sections as damaged.
With data splits sorted out, the second step is pre-
processing, some light data augmentation, and feed-
ing the neural network with RGB images. This how-
ever cannot simply be done like with COCO or KITTI
because of the images’ length. Unrolled RGB images
of pipes have resolution of around 20000x1200 pixel
to 150000x1200 pixel, which are too large and sim-
ply result in Out-Of-Memory (OOM) error when fed
directly into a detection network. Therefore, the so-
lution is a simple sliding window approach with each
patch having the size of 1200x1200 pixel. There is
also a 50% overlap between each window, so that
each defect is likely to be in full view of the net-
work. After the original image is cut into multiple
patches, data augmentation is then applied to each
patch separately. Each input patch and their corre-
sponding annotation have a 25% chance to be flipped
up-down and another separate 25% chance for left-
right flipping. This minimal augmentation helps in-
crease the variety of the dataset without introducing
too much artificial artifacts, which might have un-
known adverse effects on new unknown data. One
final step before the network gets to see the data is
down-sampling from 1200x1200 to 640x640. This
was done so that the detector can be trained with a
batch size larger than 1. Another added benefit is that
the network also requires less time for inference and
training. While accuracy could suffer due to lowered
resolution, a preliminary test shown negligible change
after down-sampling.
The third step is configuring the training with
IMPROVE 2023 - 3rd International Conference on Image Processing and Vision Engineering
192

plausible values of hyperparameters, that are suitable
for the dataset and available hardware. These hyper-
parameters can be roughly divided into two groups:
network hyperparams and trainer hyperparams. How-
ever, it should be noted, that both groups are not in-
dependent but greatly affect each other. To the first
group, the network hyperparams are, for example,
weight initialization options, or batch normalization
(Ioffe and Szegedy, 2015) configurations. Within this
group, the most important hyperparam is weight ini-
tialization, which was set to use weights pre-trained
on COCO (Tan et al., 2020). While simpler meth-
ods, such as variations of random initialization exist,
they are better suited for new unknown architectures
(He et al., 2015). Since the chosen EfficientDet-D0 is
already established, and it is already shown that trans-
fer learning greatly improves the final trained network
(Tan and Le, 2019), pre-trained weights initializa-
tion is more logical. To be more specific, pre-trained
weights allow networks to reuse proven learned fea-
ture extractors. This spares the training from the ear-
lier divergence-prone phase, which also requires a
large amount of data. As a result, such initialization
is especially useful for small datasets, that do not nec-
essarily have enough samples to properly stabilize its
feature extractors from scratch. This is still the true
for the defect dataset in this work, despite the fact that
this dataset’s domain is entirely different from that
of normal datasets, namely COCO or KITTI (normal
scenes vs. sewer pipe’s inner surfaces). With the net-
work configured, trainer’s hyperparams are next. For
this group, training hardware, especially the graphical
processing unit (GPU), has a lot of says in the config-
uration. In this case, an Nvidia GTX Titan X GPU
with 12 GB of random access memory (RAM) was
used. Thanks to the previous down-sampling step,
a batch size of 3 is set for the training. The opti-
mizer is Adam (Kingma and Ba, 2014) with default
parameters as suggested in its original paper. While
there other optimizers like stochastic gradient descent
(SGD) (Ruder, 2016) and its variants exist, Adam is
shown to keep the training process stable with little to
no additional hyperparameter configuration (Kingma
and Ba, 2014; Ruder, 2016), which is especially im-
portant when working with new unknown data.
The fourth and longest step in training a neural
network is waiting. The training process is super-
vised using a combination of loss log, mean average
precision (mAP) (Lin et al., 2014) calculation, ROC-
curve, sample outputs between epochs, and a cus-
tom practical metric (see section 3.3). This enables
early stopping of training, either manually or auto-
matically if performance reaches a plateau or wors-
ens. On the aforementioned GPU, with a total of
around 71300 training patches, each training took ap-
proximately seven days before being stopped.
The fifth and final step is evaluating the trained
network on the pre-defined test set from section 3.1.
Evaluation provides a close estimation of trained net-
works’ quality, which enables informed decision on
whether the training is finished, or what has to be
done in the next training cycle to deal with network’s
deficit. In object detection, the standard procedure for
this step is running newly trained networks on test set
to produce predictions. After that, the quality of these
predictions, and of the networks, are then determined
automatically using a quantified metric such as mAP.
While higher mAP generally means better network,
there are cases where the corresponding predictions
are not ideal despite high mAP (Redmon and Farhadi,
2018). Other metrics such as precision, recall, and
the harmonic f1 score also work well as indicators for
network’s quality. In addition to automatic mAP cal-
culation, manually examining predictions of a random
subset of the test set is often done to ensure the qual-
ity of trained networks. However, this standard proce-
dure is not directly applicable into this work, forcing
some changes, which make it more suitable for practi-
cal applications. The deficit and corresponding solu-
tions for the evaluation procedure would be discussed
in the next subsection 3.3.
3.3 Problem with mAP and Network
Evaluation
Figure 5: Differences in experts’ annotations (top), and the
networks’ detections (bottom) of formless defects, in this
case surface damages, which are marked with pink boxes.
This section provides details on why the standard
evaluation is not suitable for this use case, and how
to it was dealt with. The first sight of problem was
Automatic Defect Detection in Sewer Network Using Deep Learning Based Object Detector
193

detected by simply following the established proce-
dure, calculated mAP for all best trainings are around
only 5 mAP. Such low score normally indicates one or
more of the following problems, namely bad network
architecture, misconfiguration of input images and la-
bels, and/or peculiar problems of the dataset. Bad
network architecture is unlikely the reason, since Ef-
ficientDet is able to handle large and complex dataset
(Lin et al., 2014). Careful review of the preprocess-
ing pipeline confirms no misconfiguration of input
data. With other potential sources of problem ruled
out, the remaining and most likely the reason for low
mAP score is the dataset itself. Given all taken pre-
cautions during data gathering, as mentioned in sec-
tion 3.1, this raises the question of what exactly the
problem with the dataset would be. A step to answer-
ing this question is manually checking the network’s
detections and comparing those with the annotation.
This reveals a downside of using bounding boxes
(BB), and by extension BB-based mAP calculation,
for denoting formless and cluster-like defects (.i.e fis-
sure, root, surface damage). Manual check confirms
that the network is indeed able to detect those de-
fects and correctly denote defects areas with multiple
boxes, however these generated bounding boxes do
not have the exact configuration of the ground truth
boxes on the same damaged areas. For example, net-
work draws a single large box while the annotation
has multiple smaller side by side boxes, or vice versa
(see figure 5). This is especially bad for long fine fis-
sures or roots that run diagonally across the surface.
Therefore, from a practical point of view, mAP does
not correctly represent the network’s quality, when
such formless defects are concerned. As a side note,
while mask annotation could have solved this prob-
lem, it does have other undesirable downsides, as
mentioned in the start of section 3. Another prob-
lem with mAP is that, it lacks an intuitive baseline
to compare against. The current highest achievable
mAP on the COCO dataset is 65.4 mAP (Wang et al.,
2022b), which only shows that, that new network is
better than EfficientDet-D0 (at 34.6 mAP) at produc-
ing predictions closer to the ground truths. 34.6 mAP
does not mean that EfficientDet-D0 can only correctly
detect 34.6 out of every 100 objects; that number is
evidently higher (Tan et al., 2020). The SoTA 65.4
mAP also does not necessarily mean a double in ac-
curacy in comparison to EfficientDet-D0. Unlike, for
example, percentage where 50% means the network
handles half of given tasks correctly. All in all, mAP
has limited use in practical applications. Now that the
problem has been identified, the next part will go into
the solution.
With the SoTA metric deemed less suitable for
the job, it was decided that the final round of eval-
uation must be done manually by maintenance ex-
perts. While time and effort costly, this eliminates
any uncertainty regarding a network’s quality. Iron-
ically, the smaller dataset size helps make this task
more manageable. However, it is not realistic to ex-
pect the experts to examine every single experimental
training with different hyperparameter configurations,
because that would be a lot of unnecessary work and
the waiting time for results would be too long. There-
fore, an automatic metric for internal quality estima-
tion during experimentation, which mAP was sup-
posed to be, need to be created. In practice, the ex-
act location, and amount of defects on pipes’ inner
surface is not required by the experts. For them, it
is enough, and more practical to know on which me-
ters of pipe defects exist, and of what type. Based on
suggestions from the experts, and publication (Berger
et al., 2020), it was determined that running kilome-
ters/ meters is a standard baseline for metrics in the
field of sewer sanitation. Hence, for practical pur-
poses, the internal metric would be using running me-
ters as base. To calculate this metric, each pipe is
first divided into multiple 600x1200 chunks. Each
chunk would then be evaluated separately and would
be marked as true positive (TP), false positive (FP),
true negative (TN), or false negative (FN) depend-
ing on bounding boxes predictions within the chunk.
A chunk is deemed as TP if it contains at least one
bounding box with the correct class of one of the de-
fects in that chunk; the exact location and total num-
ber of predictions would not be taken into considera-
tion. A FP is given when the network put bounding
boxes in a defect-free chunk. A chunk is marked as
TN when the network does not produce any bounding
boxes in a defect-free chunk. A TN is asserted when
the network failed to produce any bounding boxes in
a chunk with actual defect; this is also the worst case
that must be minimized. After all chunks are evalu-
ated, standard statistics, such as accuracy, precision,
or recall can be easily calculated.
Figure 6: An example of the running meter metric; TP:
Green, TN: Blue, FP: Yellow, and FN: Red.
While this metric is clearly too lax in comparison
to mAP for SoTA object detection, it is for experts in
field of sewer system more understandable and use-
ful. Intuitively, what this metric says is, that within all
pipe sections of N meters, X% of them have defects,
which are most likely of the following Y, Z type. With
IMPROVE 2023 - 3rd International Conference on Image Processing and Vision Engineering
194

Table 1: Expert’s evaluation on test set; precision and recall
for each defect/structural class. Statistics calculated from
evaluation results provided by the Dr.-Ing. Pecher und Part-
ner Ingenieurgesellschaft mbH.
Defects/Struct. Precision Recall N object
Fissure 0.6697 0.6854 154
Root 0.7182 0.8778 129
Connection 0.9565 1. 51
Ang. dis. joint 1. 0.04 25
Break/collapse 0.037 0.5 2
Deformation 0. 0. 3
Hor. dis. joint 0.5659 0.9626 4
Settled deposit 0. 0. 43
Surface damage 0.8903 0.8406 80
Obstacle 0.6875 0.7952 78
All average 0.5525 0.5702 569
that knowledge, experts could then directly go to the
marked section to perform thorough inspection, thus
making the final decision on whether that pipe section
is to be fixed or not.
To sum up, in this work, each trained network
would first be automatically evaluated using the run-
ning meters metric. The promising ones are then sent
to experts for the final and real evaluation. With the
method and metrics for evaluation defined, the next
section would describe the final defect detection re-
sult.
4 RESULT
This section report archived performance of the fi-
nal network in terms of the running meters metric
and manual evaluation from the sewer inspection ex-
perts. Furthermore, analysis of the result and com-
ment on characteristics of different types of defect are
also given. While comparison with results from rele-
vance existing methods (Cheng and Wang, 2018; Ku-
mar et al., 2020; Wang et al., 2021) would be useful
and informative, this could not be done cleanly due
to a the lack of a common train/test dataset, as men-
tioned in subsection 2.1. To deal with this potential
deficit, it is important to stress, that this paper leans
into the current most reliable and trusted evaluators:
domain experts. On the whole, the evaluation com-
prises 10 sewer pipes with a total number of 1549 de-
fects/structures detected by the experts. According to
the running meters metric, for a total of 1147 pipe sec-
tions, the network is able to produce 391 TP (34%),
447 TN (39%), 126 FP (11%), and 188 FN (16%). In
total, the accuracy is at 73.06%.
A numerical summary of the expert’s final evalu-
ation can be seen in table 1. According to the experts,
Table 2: Severeness of the network’s false negatives. Table
provided by the Dr.-Ing. Pecher und Partner Ingenieurge-
sellschaft mbH.
Object count Condition class Severity
1 0 very severe
11 1 severe
159 2 & 3 med. & slight
90 4 minor
the total count of the network’s detections is consid-
erably higher than the manual detections by the ex-
perts: frequently, network produces multiple overlap-
ping detections for a single defect, or in other cases
a single defect is covered by several non-overlapping
detections. As a rule, network’s detections with very
low confidence score (<= 10%) are negligible false
positives, and therefore are not part of the expert’s
evaluation. Out of the 1549 defects/structures from
the experts, 261 (17%) were not found by the network
and therefore are classified as false negatives. In table
2, the severity of these false negatives is classified ac-
cording to (DWA, 2007). Most of the false negatives
are classified as condition class 2 to 4, medium to
minor defects with no immediate or short-term need
of sanitation/renovation action; counting only severe
false negatives the number drops to 12 out of 1549
(0.77%). This concludes the summarized evaluation
result from the experts.
This paragraph goes into analyzing the result on
each type of defects/structure separately. Possible
performance affecting factors, and respective poten-
tial remedies are also presented. First, defect types
can be sorted into different categories. Except for
connection, which is a structural part of the pipe, the
nine defects class can be divided into 2 subgroups,
which partially explains the difference in network’s
reaction to each class. These subgroups are flat (2D)
defects, and spatial (3D) defects. The difference be-
tween the two groups is, that spatial defects’ one
prominent feature is the offset between their surface
and the normal pipe surface; for example, how high
a pile of settled deposits is in the pipe, or how much
material is gone from the inner surface of the pipe.
However, this third dimension is lost during the un-
rolling processing. The flat defects group includes
fissure, root. On the other hand, spatial defects in-
cludes: angular displaced joint, settled deposit, sur-
face damage, break/collapse, deformation, horizontal
displaced joint, and obstacle In the flat defects group,
the network is able to handle root quite well. The
performance on fissure, however, still has room for
improvement, specifically on finer and smaller fis-
sures. Within spatial defects, the network is able to
detect surface damages, and obstacle quite well, de-
Automatic Defect Detection in Sewer Network Using Deep Learning Based Object Detector
195

Figure 7: Visualization of experts’ annotations (left) and the networks’ detection (right) on a pipe section with multiple
defects.
spite the loss of spatial information. Surface damages
are generally easy for the network to detect due to
differences of coloration and texture in comparison
to healthy pipe surface. Obstacles are also detected
quite well, although it is a diverse class with multiple
subclasses of very different visual characteristics, for
example, encrustation, root balls, protruding shards
and crossing pipes. The first reason is that, accord-
ing to the experts, they are easier to be detected in
2D images, thus less affected by the loss of spatial
information. Another possible explanation is that ob-
stacles usually appear with other defects, .i.e root and
root balls, thus detection of obstacles could be gener-
ated based on the existence of other relevant well de-
tected classes. The amount of available training sam-
ples for both surface damage, and obstacles could also
have positively contributed to the result. On the other
hand, most of the spatial defects are detected poorly
by the network. The most likely cause of this is the
mentioned loss of depth information. Furthermore,
these defects are also much rarer, thus having fewer
training samples. However, according to the experts,
deformations and horizontal displaced joints should
still be detectable without spatial data. Thus, the more
likely reason for bad performance is the lack of train-
ing data. The settled deposit class is especially bad,
despite having a somewhat sufficient amount of train-
ing samples, the network failed to find any of those
at all. Break/collapses are also in a bad position; the
network often mistakes chipped connection branches
or chipped joints in stone pipe for this type of de-
fects. Outside of defects, the single structural class,
connection, is handled easily by the network. Due
to their standardized features, connections are consis-
tence, unambiguous, and easy to label. In all relevant
classes, connection is the closest to a typical object
class in COCO or KITTI. As a side note, the final
net’s mAP@0.5, mAP@0.75, and mAP@[.5 : .95] are
12.6, 5.5, and 5.8 respectively.
5 FUTURE WORK
This section presents some possible ways forward,
including general neural network improvements and
suggested heuristics from the sewer maintenance ex-
perts. These potential improvements can be coarsely
applied to one of the following areas: the neural net-
work and the post-processing. For the network itself,
accuracy could be raised by adding more high quality
annotated data, especially for rarer defects. On top of
that, several defect classes could be divided into more
specific subclass for better differentiation; for exam-
ple roots can be broken down to tap roots, indepen-
dent fine roots, or complex mass of roots. While gen-
erally sensible, this method necessitates the need for
a lot more training data, and rework of current anno-
tated dataset. The third boost of accuracy could come
from preventing the loss of spatial information during
the unrolling; one way of achieving this would be us-
ing an RGBD camera or a stereo camera instead of
a normal RGB camera. This would greatly improve
the performance on spatial defects. Furthermore, ac-
cording the experts, adding the 3rd dimension would
also significantly improve performance of flat defects,
such as fissures. Another chance of improvement can
also be from trying out newer SoTA network like
YOLOv5, or YOLOv7 (Wang et al., 2022a), etc.;
nonetheless, given the same dataset, there would be
no guarantee of a large jump in detection quality.
During evaluation, the experts also noticed several
undesirable behaviors from the network, which when
IMPROVE 2023 - 3rd International Conference on Image Processing and Vision Engineering
196

rectified would greatly improve the performance and
ease-of-use. In any case, these are concrete rules and
heuristics that could not be easily integrated directly
into the training, because the NN training process fo-
cuses on making networks learn abstract rules from
training data implicitly. As a result, the easiest way
for these explicit heuristics to be implemented would
be as post-processing steps after the detection. Ac-
cording to the experts, fissures and surface damages
are often detected in small parts and/or multiple times.
This situation could possibly be corrected using clas-
sical methods such as Hungarian algorithm or con-
nected components to automatically merge relevant
detections together. Another suggestion is finding a
way to optimally set the minimum confidence thresh-
old, which stems from the need to avoid overloading
the experts with too many false positives. Since each
type defect are handled differently, it would also be
useful to figure out one threshold for each defect type.
An additional problem with the network is, that de-
fects on the ceiling of pipes are divided into two parts.
This is caused by trying to project a continuous cylin-
der into 2D space; while circular image convolution
would be an interesting research topic, an easier way
of fixing this could be using Hungarian algorithm, or
similar matching algorithms to match detections on
pipe’s ceiling. Finally, the following list contains sev-
eral practical heuristic rules directly from the experts,
which could be implemented to further better the final
detection:
• Roots can only be detected in the immediate joint
and branch connection area.
• Circumferential fissures are not observed in the
immediate vicinity of joints, as joints pick up
forces that lead to circumferential fissures at other
parts of the sewer pipe.
• In the joint area of vitrified clay pipe, fissures
could form due to shrinkage of the glaze while
the pipe is cooling down after the firing process.
These fissures are only on the glaze, thus are un-
problematic to pipes’ structural stability.
• There is a strong correlation between material of
pipes, as well as locations within pipes and types
of defect that would appear. For example, con-
crete pipes are susceptible to chemical corrosion,
thus showing more surface damages over time.
On the other hand, while resistant to chemical
corrosion, vitrified clay pipes are brittle. Conse-
quently, most defects found in these pipes are me-
chanical wear and tear, such as fissures.
All in all, however complex and precise, post-
processing still has to rely on a good detection base-
line, as an extension the network.
6 CONCLUSIONS
In this work, an EfficientDet-D0 was used to detect
defects on sewer pipes’ inner surface. This network
was trained on a new dataset of 14.7 km of sewer
pipe, which was manually annotated by expert in the
field. At the end, the network is able to produce good
detections of fissure, root, surface damage, obstacle,
and connection. However, other relevant defects with
spatial feature are still difficult, due to the lack of
depth information. This problem could potentially
be solved using RGB-D camera. Furthermore, mul-
tiple post-processing using known practical heuris-
tics could also be applied to further improve detection
quality. Finally, this work also provided some prac-
tical designs for processing and evaluating ”objects”
with peculiar nature, such as defects.
ACKNOWLEDGEMENTS
This work is funded by the German Federal Min-
istry of Education and Research under grant number
13N13891.
REFERENCES
Bailey, D., Jones, M., and Tang, L. (2011). Real time vi-
sion for measuring pipe erosion. In The 5th Interna-
tional Conference on Automation, Robotics and Ap-
plications, pages 486–491. IEEE.
Berger, C., Falk, C., Hetzel, F., Pinnekamp, J., Ruppelt,
J., Schleiffer, P., and Schmitt, J. (2020). Zustand
der kanalisation in deutschland - ergebnisse der dwa-
umfrage 2020. Deutsche Vereinigung f
¨
ur Wasser-
wirtschaft, Abwasser und Abfall e. V., 67:939–953.
Carion, N., Massa, F., Synnaeve, G., Usunier, N., Kirillov,
A., and Zagoruyko, S. (2020). End-to-end object de-
tection with transformers. CoRR, abs/2005.12872.
Cheng, J. C. and Wang, M. (2018). Automated detection
of sewer pipe defects in closed-circuit television im-
ages using deep learning techniques. Automation in
Construction, 95:155–171.
Cordts, M., Omran, M., Ramos, S., Rehfeld, T., Enzweiler,
M., Benenson, R., Franke, U., Roth, S., and Schiele,
B. (2016). The cityscapes dataset for semantic urban
scene understanding. CoRR, abs/1604.01685.
DIN (2011). Investigation and assessment of drain and
sewer systems outside buildings - part 2: Visual in-
spection coding system; EN 13508-2:2003+A1:2011.
Duran, O., Althoefer, K., and Seneviratne, L. (2002). Auto-
mated sewer pipe inspection through image process-
ing. volume 3, pages 2551–2556 vol.3.
DWA (2007). DWA-M 149-3E: Conditions and assessment
of drain and sewer systems outside buildings–part 3:
Condition classification and assessment.
Automatic Defect Detection in Sewer Network Using Deep Learning Based Object Detector
197

Geiger, A., Lenz, P., and Urtasun, R. (2012). Are we ready
for autonomous driving? the kitti vision benchmark
suite. In 2012 IEEE Conference on Computer Vision
and Pattern Recognition, pages 3354–3361.
Girshick, R. B. (2015). Fast R-CNN. CoRR,
abs/1504.08083.
Hassan, S. I., Dang, L. M., Mehmood, I., Im, S., Choi, C.,
Kang, J., Park, Y.-S., and Moon, H. (2019). Under-
ground sewer pipe condition assessment based on con-
volutional neural networks. Automation in Construc-
tion, 106:102849.
He, K., Zhang, X., Ren, S., and Sun, J. (2015). Delving deep
into rectifiers: Surpassing human-level performance
on imagenet classification. CoRR, abs/1502.01852.
Hengmeechai, J. (2013). Automated Analysis of Sewer In-
spection Closed Circuit Television Videos Using Im-
age Processing Techniques. PhD thesis, Faculty of
Graduate Studies and Research, University of Regina.
Huynh, P., Ross, R., Martchenko, A., and Devlin, J. (2015).
Anomaly inspection in sewer pipes using stereo vi-
sion. In 2015 IEEE International Conference on
Signal and Image Processing Applications (ICSIPA),
pages 60–64. IEEE.
Ioffe, S. and Szegedy, C. (2015). Batch normalization: Ac-
celerating deep network training by reducing internal
covariate shift. CoRR, abs/1502.03167.
Kingma, D. P. and Ba, J. (2014). Adam: A method for
stochastic optimization. arXiv:1412.6980.
Kumar, S. S., Wang, M., Abraham, D. M., Jahanshahi,
M. R., Iseley, T., and Cheng, J. C. (2020). Deep
learning–based automated detection of sewer defects
in cctv videos. Journal of Computing in Civil Engi-
neering, 34(1):04019047.
Kunzel, J., Werner, T., Eisert, P., and Waschnewski, J.
(2018). Automatic analysis of sewer pipes based on
unrolled monocular fisheye images. In 2018 IEEE
Winter Conference on Applications of Computer Vi-
sion (WACV), pages 2019–2027. IEEE.
Lin, T., Goyal, P., Girshick, R. B., He, K., and Doll
´
ar, P.
(2017). Focal loss for dense object detection. CoRR,
abs/1708.02002.
Lin, T., Maire, M., Belongie, S. J., Bourdev, L. D., Girshick,
R. B., Hays, J., Perona, P., Ramanan, D., Doll
´
ar, P.,
and Zitnick, C. L. (2014). Microsoft COCO: common
objects in context. CoRR, abs/1405.0312.
Liu, W., Anguelov, D., Erhan, D., Szegedy, C., Reed, S.,
Fu, C.-Y., and Berg, A. C. (2016). SSD: Single Shot
MultiBox Detector. arvix, 9905:21–37.
Makar, J. M. (1999). Diagnostic techniques for sewer sys-
tems. Journal of Infrastructure Systems, 5:69–78.
Moselhi, O. and Shehab-Eldeen, T. (1999). Automated de-
tection of surface defects in water and sewer pipes.
Automation in Construction, 8(5):581–588.
M
¨
uller, K. and Fischer, B. (2009). Objective condition as-
sessment of sewer systems. Strategic Asset Manage-
ment of Water Supply and Wastewater Infrastructures.
M
¨
uller, K., Fischer, B., Lehmann, T., Hunger, W., and
Sch
¨
afer, T. (2006). Forschungsprojekt bilderkennung-
ergebnisse der ersten projektphase. B I UmweltBau,
5.
Redmon, J., Divvala, S., Girshick, R., and Farhadi, A.
(2016). You Only Look Once: Unified, Real-Time
Object Detection. arvix. arXiv:1506.02640 [cs] ver-
sion: 5.
Redmon, J. and Farhadi, A. (2018). YOLOv3: An Incre-
mental Improvement. arvix. arXiv:1804.02767 [cs].
Ren, S., He, K., Girshick, R. B., and Sun, J. (2015). Faster
R-CNN: towards real-time object detection with re-
gion proposal networks. CoRR, abs/1506.01497.
Ruder, S. (2016). An overview of gradient descent opti-
mization algorithms. CoRR, abs/1609.04747.
Sinha, S., Karray, F., and Fieguth, P. (1999). Under-
ground pipe cracks classification using image anal-
ysis and neuro-fuzzy algorithm. In Proceedings of
the 1999 IEEE International Symposium on Intelli-
gent Control Intelligent Systems and Semiotics (Cat.
No.99CH37014), pages 399–404.
Sinha, S. K. (2000). Automated underground pipe inspec-
tion using a unified image processing and artificial in-
telligence methodology. University of Waterloo.
Tan, M. and Le, Q. V. (2019). Efficientnet: Rethink-
ing model scaling for convolutional neural networks.
CoRR, abs/1905.11946.
Tan, M., Pang, R., and Le, Q. V. (2020). Effi-
cientDet: Scalable and Efficient Object Detection.
arXiv:1911.09070 [cs, eess] version: 7.
Tung-Ching, S. (2015). Segmentation of crack and open
joint in sewer pipelines based on cctv inspection im-
ages. In 2015 AASRI International Conference on
Circuits and Systems (CAS 2015), pages 263–266. At-
lantis Press.
Wang, C.-Y., Bochkovskiy, A., and Liao, H.-Y. M. (2022a).
Yolov7: Trainable bag-of-freebies sets new state-of-
the-art for real-time object detectors.
Wang, M., Luo, H., and Cheng, J. C. (2021). Towards an
automated condition assessment framework of under-
ground sewer pipes based on closed-circuit television
(cctv) images. Tunnelling and Underground Space
Technology, 110:103840.
Wang, W., Dai, J., Chen, Z., Huang, Z., Li, Z., Zhu, X.,
Hu, X., Lu, T., Lu, L., Li, H., et al. (2022b). In-
ternimage: Exploring large-scale vision foundation
models with deformable convolutions. arXiv preprint
arXiv:2211.05778.
Yang, M.-D. and Su, T.-C. (2008). Automated diagnosis
of sewer pipe defects based on machine learning ap-
proaches. Expert Systems with Applications.
Zhao, Z.-Q., Zheng, P., Xu, S.-T., and Wu, X. (2019). Ob-
ject detection with deep learning: A review. IEEE
Transactions on Neural Networks and Learning Sys-
tems, 30(11):3212–3232.
IMPROVE 2023 - 3rd International Conference on Image Processing and Vision Engineering
198
