Simulation-Based Estimation of Resource Needs in Fog Robotics
Infrastructures
Lucien Arnaud Ndjie Ngale
1,2
, Eddy Caron
1
, Huaxi (Yulin) Zhang
2
and M
´
elanie Fontaine
2
1
Laboratoire de l’Informatique du Parall
´
elisme, Ecole Normale Sup
´
erieure de Lyon, 46 all
´
ee d’Italie, Lyon, France
2
Laboratoire des Technologies Innovantes, Universit
´
e de Picardie Jules Verne, 48 rue d’Ostende, Saint Quentin, France
Keywords:
Robotics, Fog Computing, IoT, Simulation, Machine Learning.
Abstract:
Embedded devices are increasingly connected to the Internet to provide new and innovative applications in
many areas. These devices (Edge devices or “Things” in IoT) are heterogeneous sensors, cameras and even
robots performing sometimes certain tasks locally. Fog Computing (or Fog robotics) optimizes the man-
agement of these tasks, offering data management mechanisms (computation and storage) closer to the data
source. Nevertheless, many aspects remain closed to Fog computing environments like resource needs estima-
tion in such environments. Indeed, such a topic remains a critical challenge, as it falls under either solving very
complex optimization problems or comparing hypothetical scenarios very time consuming and/or expensive
for deployment in a real environment. To help on this challenge we built SERFRI, an approach to estimate the
resource needs in Fog robotics environments based on simulation. This approach optimizes simultaneously
the duration and the Fog resources utilization cost in order to determine the minimum resource requirements
compromising both metrics. We validated this approach on an existing robotics use case. This one aims at
deploying a human face detection service on streaming images.
1 INTRODUCTION
The Internet of Things (IoT) has transformed the In-
ternet, enabling communication between every kind
of objects (Things). The growing number of sen-
sors and smart devices increased the possibilities of
data generation and collection (R. de Oliveira. et al.,
2021). These smart devices are robots in our case,
making the previous observation more important in
the field of robotics (Turnbull and Samanta, 2013;
Norman and Bobrow, 1975). Indeed robotics is be-
coming more and more topical, as it facilitates the
automation of tasks and guarantees better accuracy
and speed of execution compared to human process-
ing (Kwon et al., 2020; Moniz and Krings, 2016).
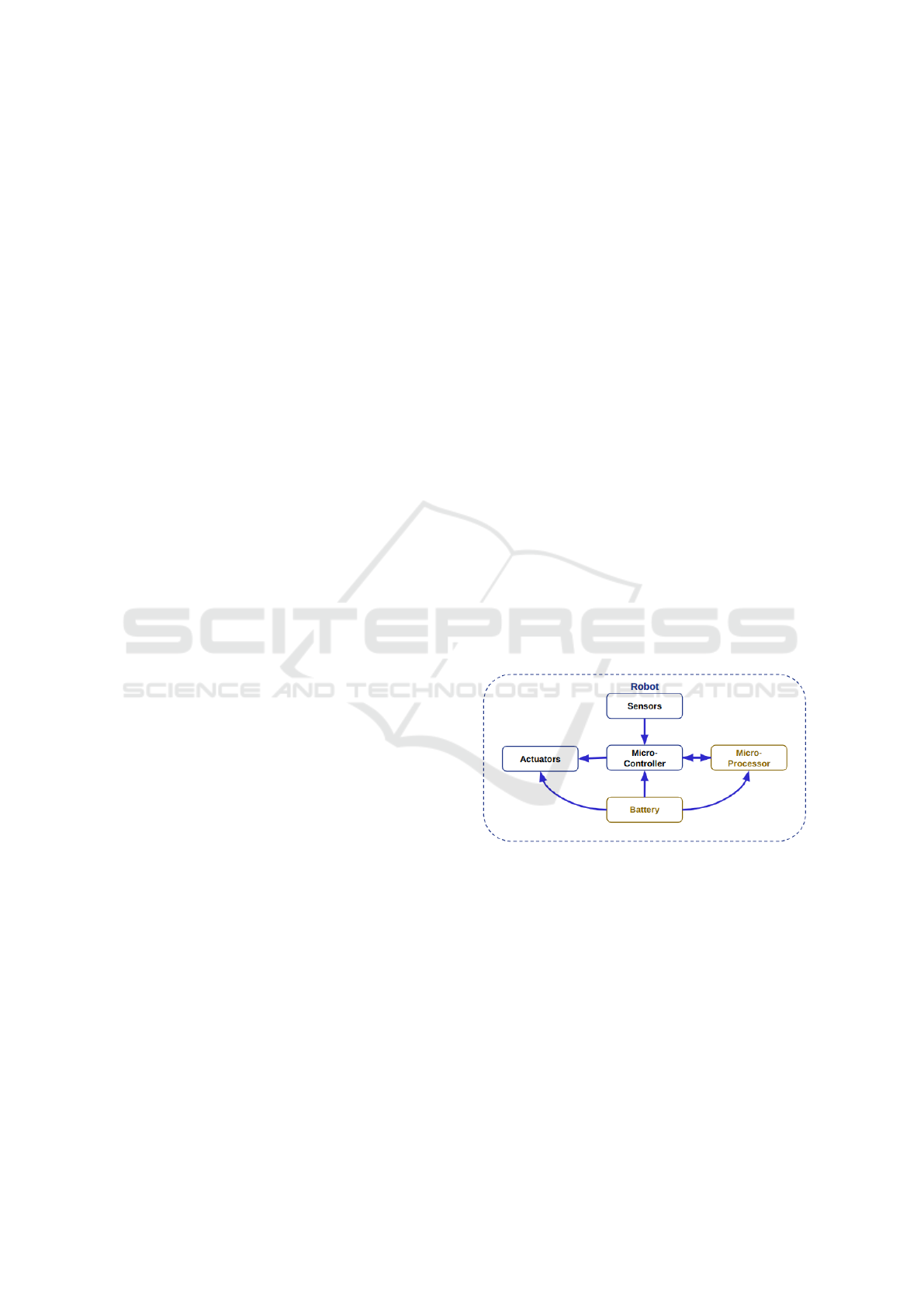
Basically, the high level architecture of a robot
(Figure 1) consists of: sensors which get information
about the robot environment, actuators which allow
the robot to move in its environment, micro-controller
which manages the actuators’ motion, a microproces-
sor which computes tasks and the battery alimenting
the whole system. In the basic running process of
a robot, there are two main problems related to the
computational capabilities of the robot: (i) the first
one is about energy consumption, since this process
Figure 1: Five main components of a robotic architecture.
runs frequently and asynchronously the battery will
be used by the assembly of robot components simul-
taneously, which makes the activity not feasible in the
long term; (ii) the second one is about the fact that
in most cases, robots do not have enough computing
power or storage capacity to process (for a current ser-
vice) and post-process (e.g: for the updating of a ser-
vice) data generated.
In some cases it has been shown that it is more
advantageous relative to time constraints to deploy
robotic applications (which must be real-time) on re-
mote resources. Figure 2 presents for example a com-
parison between the ETL (Extract - Transform - Load)
100
Ngale, L., Caron, E., Zhang, H. and Fontaine, M.
Simulation-Based Estimation of Resource Needs in Fog Robotics Infrastructures.
DOI: 10.5220/0012031300003488
In Proceedings of the 13th International Conference on Cloud Computing and Services Science (CLOSER 2023), pages 100-111
ISBN: 978-989-758-650-7; ISSN: 2184-5042
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)

Figure 2: Comparing the ETL process of deploying a hu-
man face recognition service locally and remotely.
process duration of deploying a robotic application lo-
cally and remotely (36 times more powerful than the
robot). This application was made using a Reachy
humanoid robot (Mick et al., 2019) that captured 100
images (at the rate of 7 images per second) that were
processed locally or on remote resources, to deter-
mine whether there was a human face or not. Then
by the fiftieth request, the local deployment becomes
in average 50s slower than the remote one. Based on
the fact that industrial robotics applications often con-
sist of millions of requests and based on the benefits
of the Fog Computing (in terms of latency and power
computing), it is then really more advantageous to de-
ploy such applications on Fog-based environments.
Fog Computing offers a large computing and
storage capacity near data sources (robots in this
case, where we talk about Fog Robotics Platform
(FRPs) (Gudi et al., 2017)). This is a recent ap-
proach that solves the latency problem present in na-
tive Cloud environments, for long-term and real-time
applications (as in the case of industrial robotics). The
architecture of Fog computing consists of three main
layers: an IoT layer which contains connected data
sources (such as smartphones, sensors, robots, etc.)
sending requests (periodic, asynchronous and hetero-
geneous in the case of robotics applications), a Fog
layer which contains resources (static/dynamic and
heterogeneous/homogeneous) near the data sources
and a Cloud layer which contains static resources far
the data sources.
We are interested in two main problems related
to such platforms: (i) indeed, in general, setting up
certain hypothetical scenarios of Fog platforms is not
possible at the real scale (this is sometimes due to
high price of industrial robots and the financial cost
of reserving or using a certain number of resources);
(ii) moreover, the global makespan
1
of the platform
often decreases with the number of resources increas-
ing while the financial cost of using these resources
does not have a known and specific evolution a pri-
1
global queries’ completion time
ori. Two questions then arise, respectively to the two
problems mentioned above: (a) How to simulate the
deployment of FRPs in a realistic way? (b) how to es-
timate, based on a realistic simulation, the sufficient
(minimum) number of Fog resources needed to guar-
antee a fast execution and at a lower financial cost of
a robotic application?
This paper presents an approach for Simulation-
based Estimation of Resource needs in Fog Robotics
Infrastructures (SERFRI). It aims at providing a FRP
configuration reducing the activity duration as well
as the resources usage cost. More precisely, it deter-
mines the minimum number of Fog resources reduc-
ing significantly simultaneously: the makespan and
the financial utilization cost of Fog Computing nodes.
As a proof of concept, this approach has been used on
an existing robotics use case. For this use case the IT
architecture specification has been estimated to sup-
port its activity.
In the following sections of the paper, we present:
the case study in Section 2, the related works in Sec-
tion 3, the core principle of our contribution in Sec-
tion 4, the experimental settings, results and com-
ments in Section 5 and the conclusion in Section 6.
2 THE CASE STUDY
This section presents the study and the specifications
of an existing robotics use case which is about de-
ploying a human face detection service on a stream
of images by a Reachy humanoid robot (Mick et al.,
2019). Reachy (Figure 3) is a human-scale robotic
arm with seven joints from shoulder to wrist, which
can help researchers explore, develop and test innova-
tive control strategies (such as tele-operation or gaze
control) and interfaces on a human-like robot. Its 3D
printed structure and ready-to-use actuators make it
inexpensive compared to the price of an industrial-
grade robot. Using an open-source architecture, its
design makes it widely pluggable and customizable,
so it can be integrated into many applications.
In Figure 3 we can see that Reachy has two high
definition cameras and several articulations. This al-
lows realizing through its use several use cases. The
present use case employs one of Reachy’s cameras to
capture a stream of images to determine if there is
at least one human face in each image. In this case,
Reachy will raise the left hand and if not, the right
hand. In Section 1 we have shown that for a number
of resources that are globally 36 times more powerful
than Reachy’s NUC, the ETL process (photo capture,
image computation, response to Reachy as shown in
Figure 5) was faster. Two main challenges appear: (i)
Simulation-Based Estimation of Resource Needs in Fog Robotics Infrastructures
101

Figure 3: Reachy’s Full kit picture: 3D printed MJF
Painted - Flexible PU molded - Aluminium Construction;
670x1800x200mm with arms outstretched; 180 W of Max
Power consumption and 6.2 kg of weight.
Figure 4: The Reachy use case architecture.
Figure 5: The Reachy use case workflow modeling.
Since the latency between Reachy and the remote re-
sources represents a major parameter (more than 200
ms) in the duration of the ETL process, what type of
distributed system would be best suited to deploy such
a use case? (ii) To perform the experiment highlighted
in Figure 2, 3 Grid’5000 nodes of the chetemi cluster
2
(Intel Xeon E5-2630 v4) located in Lille were used
(Figure 4), however with 2 nodes of the same type
after a certain number of requests or with 1 node of
another type of resources, the same type of behavior
could be observed; what would be the sufficient (tak-
ing less time and less financial cost to run) number
of remote computing nodes for this use case? Part of
Section 3 gives some clarification on the type of dis-
tributed system adequate for the application underly-
ing this use case and Section 4 will provide an element
of answer regarding the estimation of the resource re-
2
https://www.grid5000.fr/w/Lille:Hardware#chetemi
quirements on the adequate platform.
3 RELATED WORK
Modeling and simulation technology has become a
useful and powerful tool in Large Scale Distributed
Systems (LSDS) deployments (particularly in the
Cloud computing research community) to deal with
performance evaluation and security problems in such
environments (Zhao et al., 2012). It is necessary
to model both the platform and the application con-
cerned. In this Section, we present: (a) A brief back-
ground on the deployment of robotic ecosystems on
LSDS in terms of brief comparative study to justify
the use of Fog Computing Platforms, (b) some simu-
lators of application deployments on Fog-based envi-
ronments and (c) some Fog resource needs estimation
approaches.
3.1 Deployment of Robotic Ecosystems
on Large Scale Distributed Systems
Many works present the deployment of robotic
ecosystems on large-scale distributed systems in var-
ious paradigms as Service Oriented Architecture
(SOA), Cloud Computing, Edge Computing, Fog
Computing and peer-to-peer.
Cloud and SOA (Papazoglou and Van
Den Heuvel, 2007) offer a high level of secu-
rity, large computing capacities and interoperability.
An initial type of deployment to virtualize robotic
hardware and software resources and offer them as
services on the Cloud via the web is more and more
topical. For example, RobotWeb (Koubaa, 2014) is a
SOAP-based web service middleware-based system
that binds robot computing resources as services and
publishes them to end users. In (Koubaa, 2014), the
robots run on the Robotic Operating System (ROS),
as it provides a hardware abstraction that facilitates
application development.
Edge Computing enables the decentralization of
the management of robot functionalities, thus increas-
ing the reliability and reducing the latency of the cen-
tralized system (Chen and Hu, 2013). The work pre-
sented in (Ray, 2016) proposes a new concept that ad-
dresses the problems of supporting control and moni-
toring activities at deployment sites and industrial au-
tomation. In that work, smart objects can monitor
peripheral events, induce sensor data acquired from
various sources, use ad hoc, local and distributed Ar-
tificial Intelligence (AI) to determine the appropriate
course of action. The goal is to control or dissemi-
nate static or dynamic robotic objects that are aware
CLOSER 2023 - 13th International Conference on Cloud Computing and Services Science
102

of their position in the physical world in a seamless
manner by providing a way to operate them as sug-
gested by the Internet of Robotic Things (IoRT) con-
cept (Ray, 2016).
The use of pairing technologies (Kapitonov et al.,
2021) presents a wide decentralization of robotic de-
vices, giving them economic independence by us-
ing Peer-to-peer technologies, distributed registry and
cryptography. Table 1 (Sakovich, 2020) gives a more
explicit comparison of these different approaches.
Table 1: Comparison of distributed system paradigms.
Paradigm Latency
Data
management
Scalability
Computing
Capabilities
SOA and
Cloud
High Centralized High High
Edge
computing
(IoT)
High Decentralized Low Low
Fog
computing
Low Decentralized Low Low
Peer-to-peer Very Low
Widely
decentralized
Very Low Very High
The concept of Robot as a Service (RaaS) has
made it easier to manage robotic functionalities. Ev-
erything is done so that the end user does not have
to worry about updating the functionality. The RaaS
concept directs the work related to Fog robotics to-
wards the ROS improvement in order to favor in a
first step, a large decentralization of the management
of robotic functionalities. ROS is a widely used soft-
ware development framework with packaging tools
and communication infrastructure for robotic scenar-
ios, often easily deployed on virtual machines running
on Android devices, smart mobile gateways and espe-
cially robotic hardware (Quigley et al., 2009).
The work done by (Mushunuri et al., 2017), con-
sists in linking the NLopt optimization library (John-
son, 2014) (which implements several types of op-
timization algorithms) to ROS. Through this library,
they optimize the communication infrastructure of
robotic scenarios, thus promoting the management of
limited resources in various other mobile IoT environ-
ments.
3.2 Simulation in Fog-Based
Environments
Simulating application execution in LSDS is very
common these days generally speaking in Cloud-
based environments. In this Section we will discuss
some of the most relevant and existing simulators in
Fog environments.
iFogSim (Gupta et al., 2017) is a simulation
framework allowing to model IoT, Edge and Fog envi-
ronments and to measure the impact of resource man-
agement techniques on latency, energy consumption,
network congestion and the cost of using resources. it
also demonstrates strong scalability in terms of mem-
ory consumption and execution time. However, it
is limited with regard to the network communication
model, since it does not deal with device-to-device
communications because it considers a hierarchical
organization of Fog equipment.
MyiFogSim (Lopes et al., 2017) is a simulation
framework that is based on iFogSim, so it inherits all
its assets. In addition to these strengths, it supports
the analysis of the impact of virtual machine migra-
tion policies on the quality of service of applications.
It therefore also inherits the network communication
modeling limitations present in iFogSim.
YAFS (Lera et al., 2019) is a simulation frame-
work for IoT applications in Fog environments. It
has broader functionality than iFogSim and Myi-
FogSim, in that it deals with both Fog resource man-
agement and IoT application placement on Fog de-
vices. In addition, its modeling of Fog environments
is much more realistic and strong. However, its cost
model is not available, its network model is limited
and customization of the mobility model is not sup-
ported (Kunde and Mann, 2020).
3.3 Fog Resource Needs Estimation for
IoT Applications
Fog Computing brings a recent approach to data
management, resource management is very little dis-
cussed in Fog-based environments. Previous studies
are limited to Cloud and Edge scenarios only.
Reference (Aazam and Huh, 2015) presents a ser-
vice oriented resource management model for IoT de-
vices, through Fog, which can help in efficient, effec-
tive, and fair management of resources. Their work
mainly focused on customer type and device based
resource estimation and pricing, but they do not take
into account IoT device capabilities, like CPU and
memory in their model.
Reference (Garcia et al., 2018) analyzes and esti-
mates the real Fog computational capacity in the city
of Barcelona, which is one of the world’s most pop-
ular smart cities. Thus, they do not focus on spe-
cific applications or specific types of applications like
robotics applications.
Reference (Kattepur et al., 2017) mainly deals
with the estimation of the execution times of robotics
applications in heterogeneous Fog environments.
They implement their approach on applications pro-
cessing images and videos. However, they do not
address the estimation of Fog resource requirements,
moreover the model does not take into account the
CPU degradation of Fog resources.
Simulation-Based Estimation of Resource Needs in Fog Robotics Infrastructures
103
This work primarily discusses the Fog resource re-
quirements of robotic devices of the Edge layer, since
this kind of deployment is a compromise for the ma-
jority of the comparison criteria (good latency, better
security, good data management) in Table 1. It dif-
fers from existing works about multi-objectives op-
timization in that it does not focus on resource uti-
lization optimization but on resource needs estimation
(whose use can be further optimized). This estimation
targets the reduction of two metrics simultaneously:
the makespan and financial Fog resource utilization
cost; Through robust and reliable simulation based on
the well-known simulator, SimGrid
3
(Casanova et al.,
2014), which has one of the best network communi-
cation models to date.
4 SERFRI’s CORE PRINCIPLE
To estimate the resource requirements of an appli-
cation based on the simulation of its deployment
in a FRP, it would be necessary to: (i) model this
FRP, (ii) model the robotic application, (iii) set up
the simulation and (iv) simulate application deploy-
ments on multiple platform scenarios (since simula-
tion is less time-consuming) and compare the met-
rics (makespan, cost) to determine the best type of re-
sources to use (among numerous types). These steps
represent the phases of SERFRI and are the subject of
presentation in this section.
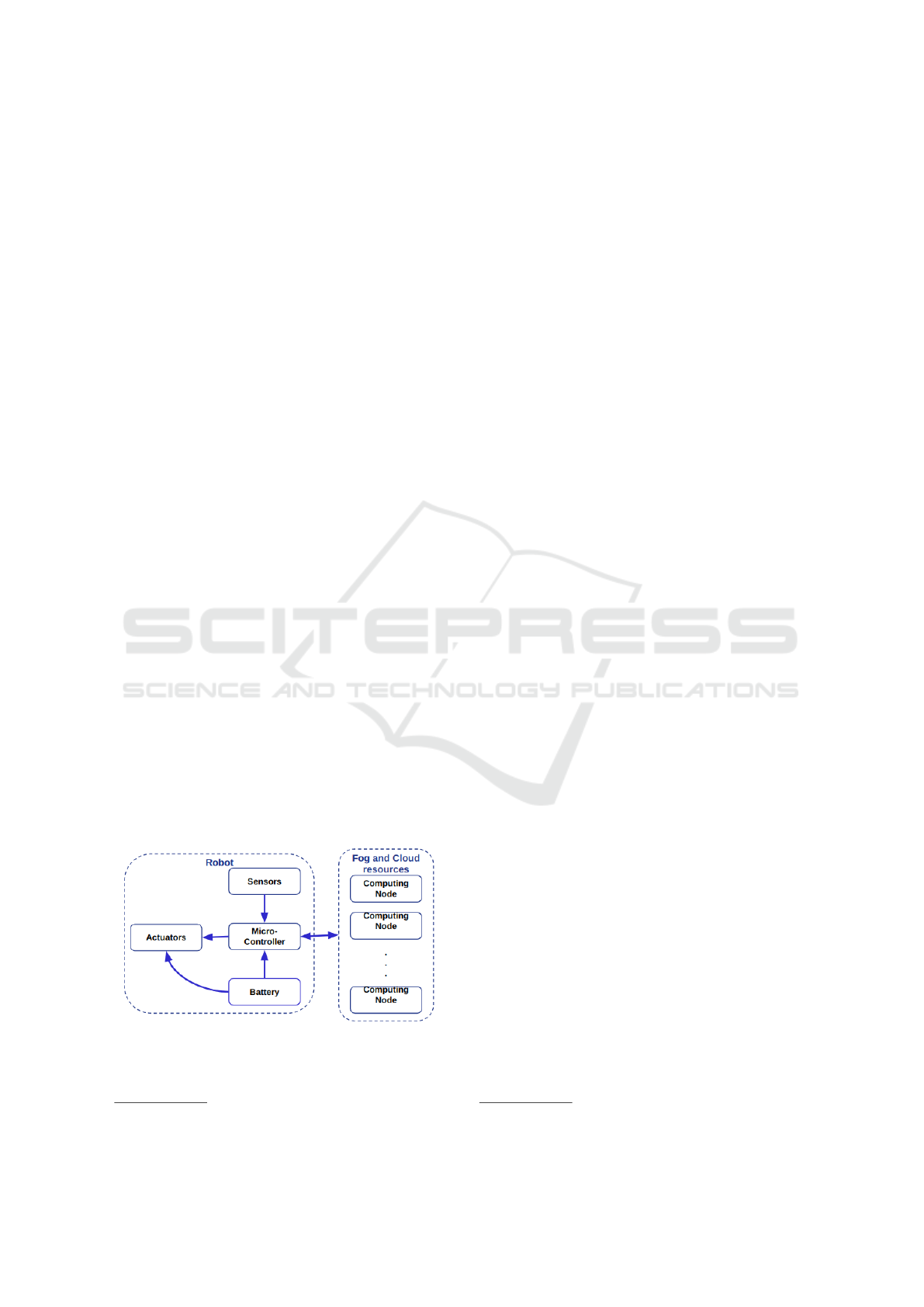
4.1 Fog Robotics Platform Modeling
Figure 6 takes up the high-level architecture of a
robot already presented in Figure 1 without on-board
computing and storage capabilities. In this work, we
deal only with homogeneous Fog environments con-
taining static resources.
Figure 6: Fog Robotic Platform modeling.
The first objective of this approach is to deter-
3
https://simgrid.org/usages.html
mine the global resource needs (Workload
4
(W ), and
Storage (S) capacity) of the application, then to esti-
mate the configuration of resources (storage capacity,
and computing power) which satisfy at best the global
needs and simultaneously compromises the makespan
and the cost of using Fog resources.
To parameterize this situation, we represent a Fog
resource of order j by two types of information:
• the fixed parameters (without dependency on its
activity): the cost of using the resource per unit of
time (c
j
); resource memory (r
j
); and its storage
capacity (s
j
).
• the calculated parameters (depend on its activ-
ity): the calculation speed of the node (v
j
), which
is the product of the number of cores, the clock
frequency and the number of operations per in-
structions cycle of the Fog node; the start com-
puting time (b
j
); the completion time of all the
requests entrusted to this resource during the ac-
tivity (m
j
).
Finally, a Fog resource of order j (FN
j
) can
be written according to the expression FN
j
=
(r
j
, s
j
, c
j
, v
j
, b
j
, m
j
).
Considering n Fog resources, C the resource uti-
lization cost and M the makespan of the Fog layer,
then appears the following constraints and relations:
S <
n
∑
j=1
s
j
(1)
C =
n
∑
j=1
c
j
× m
j
(2)
M = Max({b
j
+ m
j
}
n
j=1
) − Min({b
j
}
n
j=1
) (3)
4.2 Robotic Application Modeling
Figure 6 suggests that the application be divided into
two sub-applications: a Client application to issue re-
quests and a Server application to process these re-
quests. In the context of robotics, these queries are:
• periodicals: for each pair of consecutive requests,
there is a constant duration between their emission
dates (Equation (5));
• asynchronous: sending and processing a request
does not prevent the same operations for other re-
quests;
• heterogeneous: the quantity of data communi-
cated varies according to the requests.
4
in FLOPs (FLoating Point OPerations)
CLOSER 2023 - 13th International Conference on Cloud Computing and Services Science
104

The i-order request (R
i
), is characterized by: a date
of issue (e
i
), a quantity of data that it communicates
(d
i
). Finally we write: R
i
= (e
i
, d
i
). And for a set of
q periodical (t-periodical (Equation (5))) requests we
define a function T giving the completion time of a
i-order request processed by the j-order Fog resource
by:
T : {R
i
}
q
i=1
× {FN
j
}
n
j=1
→ R
+
(R
i
, FN
j
) 7→ t
i j
(4)
So that:
t
i j
=
value > 0 if R
i
is processed by FN
j
0 else.
e
i+1
= e
i
+t, ∀ 0 < i < q (5)
The workload of the i-order request will then be
defined by Equation (6). This workload being the
same for the same application even if the resources
specification change, helps in compute the corre-
sponding completion time of a request by the new re-
source, having the completion time of the previous
one.
W
i j
= t
i j
× v
j
(6)
Figure 6 suggests also three kind of events
5
:
Sending event (which sends the requests), a Comput-
ing event (which processes the data communicated by
the requests) and the Receiving event (Which load to
the data source/an IoT device the results of requests).
These events happen in this order: Sending, comput-
ing and Receiving; The robot runs the Sending and
the Receiving events when the resources handle the
Computing event.
4.3 Simulation Settings
Even though there are a very large number of sim-
ulators in Fog based environments, there are some
limitations on the most known of them, as they are
based on other simulators that are limited in terms
of network communication models for example. To
circumvent this limitation, we used SimGrid which
is very powerful for simulations in many types of
LSDS and in Cloud and Grid computing in particu-
lar. SimGrid has an accurate network communica-
tion model, which helps make the simulation realis-
tic (Velho and Legrand, 2010). It has been used in
hundreds of projects and helps in both distributed ap-
plications and LSDS evaluation. Moreover, there is a
very large community around him since it represents
more than twenty years of code improvement.
A SimGrid study consists of:
5
An event means an action (Sending, Computing or Re-
ceiving) in this case
• The description of the platform concerned:
defining the zones of the platform studied, the
entities (hosts) which composed them as well as
a description of the specifications of these hosts
and the connections between them. This can be
done through an XML file or an assembly of code
instructions, built from the following parameters:
resource specifications {FN
j
}
n
j=1
, latency (lt) and
bandwidth (bw) of the connection between the IoT
layer and the Fog layer;
• The description of the application: a set of func-
tions or events that must occur during the execu-
tion of a deployment scenario. In SimGrid, they
are represented by Classes or Event Functions;
• The deployment: which specifies which host ex-
ecutes which event. It can be expressed through
an XML file or an assembly of code instructions,
built taking into account the workflow described
above (Sending - Computing - Receiving) exe-
cuted by the corresponding hosts (robot - Fog re-
sources - robot).
Our simulation is therefore likened to a simulate()
function which finally takes as parameters:
{FN
j
}
n
j=1
, lt, bw, the requests sending period t
and the function T in Equation (4)). This function
(simulate()) returns again {FN
j
}
n
j=1
, with suitable
values of calculated parameters of each resource
related to the execution of the application, since
before the execution those parameters were all set
to 0. However the workload generated by a request
is not known, it is then necessary to find what the
function T corresponds to in our simulation. T can be
assimilated (depending on the use case) to a mathe-
matical formula, machine learning model or mapping
object and so on, that give exactly or estimate the
completion time of a request by a Fog resource
according to the characteristics of the request and
those of the Fog resource. Then an estimation of the
query workload is given by Equation (6)).
4.4 Algorithm of the Approach
The objective of SERFRI is to propose a resource
type and the optimal number of resources of this type
among a set of resource types, in order to simultane-
ously reduce as far as possible the makespan and the
global cost of resources use. The goal is to apply it on
each type of resource studied and select the one that
optimizes the makespan and the cost. Indeed, accord-
ing to a specific resource type, for each resource of
order j, FN
j
= FN
1
and FN
1
= (r, s, c, v
j
, b
j
, m
j
)
where r, s, c are constant. We do not deal with re-
source management and assume that the scheduling
Simulation-Based Estimation of Resource Needs in Fog Robotics Infrastructures
105

used for the distribution of requests to resources is
the Round-Robin algorithm, and that the scheduling
of requests on a node follows the logic of the FIFO
algorithm.
The problem that this approach tries to solve can
be reformulated as follows: Assuming we have l
types of resources ({hn
j
}
l
j=1
) and p configurations
6
({con f ig
k
}
p
k=1
) possible for each type of resource,
what would be the pair (hn
j
, con f ig
k
) that would
best reduce the makespan and financial cost of us-
ing the resources (by serving requests in order of
arrival, without attempting on line scheduling on
them)? The results of the simulations of each pair in
{hn
j
}
l
j=1
× {con f ig
k
}
p
k=1
can be represented by two
matrices of order p × l: the makespan matrix A (A
k j
is the makespan when con f ig
k
resources of type hn
j
are used) and the financial cost matrix B (B
k j
is the
financial cost of using con fig
k
resources of type hn
j
).
The problem as formulated can be solved by a
Pareto optimization (Ngatchou et al., 2005), whose
solution (hn
j
0
, con f ig
k
0
) verifies that there is no pair
(A
k j
, B
k j
) so that A
k j
< A
k
0
j
0
and B
k j
< B
k
0
j
0
. This
can lead mathematically speaking to several solu-
tions, some of which may not be acceptable in prac-
tice.
Algorithm 1 of the SERFRI approach aims at se-
lecting the most practically acceptable solution in
the theoretical Pareto front (of couples verifying the
Equation (1)). It proceeds by calculating the ratios
(Equation (7)) relative to a basic resource type and a
basic configuration for each metric and by perform-
ing optimization operations on them. This algorithm
highlights some functions that we define below:
φ : M
p×l
→ M
p×l
M 7→ {
M
k j
−min cell val(M)
min cell val(M)
}
(k, j) ∈ 1, p × 1,l
(7)
In the φ function definition, min cell val(M) returns
the minimum value of the elements of M. This func-
tion (φ) returns a matrix where each cell has for value,
the relative error of the value of the cell of the same
position as this one in matrix M, compared to the cell
of matrix M whose value is minimal.
σ : M
p×l
2
→ M
p×l
(M, N) 7→ {max(M
k j
, N
k j
)}
(k, j) ∈ 1,p × 1,l
(8)
The σ function returns a matrix where each cell has,
for value, the maximum value of two cells of the same
position as this one in the matrices M and N.
This algorithm is indeed of complexity O(p × l),
which is faster than first applying a Pareto optimiza-
tion of exemplary complexity (O(p × l × log(p ×
6
the possible numbers of resources
Algorithm 1: Determine the Fog resource needs.
Require: A ∨ B
Ensure: k
0
, j
0
δ ← σ(φ(A), φ(B))
(k
0
, j
0
) ← argmin
k, j
({δ
k j
}
(k, j) ∈ 1, p × 1,l
)
return k
0
, j
0
l)) (Deb et al., 2002)) before implementing a selec-
tion algorithm to find the solution of the front that is
in practice acceptable. From the pair (k
0
, j
0
), we then
have the type of resources (hn
j
0
) and the number of
resources of this type (con f ig
k
0
) which compromises
the simultaneous reduction of the makespan and fi-
nancial cost of using the resources.
5 EXPERIMENTS
In this section, we first validate the simulation of the
deployment of the use case expressed in Section 2.
And then, we present the estimated resource type
specifications (among many types of resources) to op-
timally set up the infrastructures of this case. The sim-
ulator
7
is publicly available on GitLab and contains
dataset, source code and instructions to reproduce our
results.
5.1 Simulation Validation
To make a simulation reliable, it should be as realis-
tic as possible. One way to validate it is to evaluate its
accuracy and its scalability compared to the same sce-
nario in a real environment. We evaluate the accuracy
of our simulator by comparing the time-based traces
obtained in real situations and in simulation, about
the completion time and we evaluate the scalability
by evaluating the machine learning models predicting
the services’ completion times when the number of
cores is increasing.
Table 2: Mean Absolute Errors (MAE) and Standard devi-
ations (STD) according to the number of cores. CT stands
for Completion Time.
Number
of cores
CT MAE (s) CT STD (s)
Image
size
STD (KB)
20 22.83 26.07 23.76
40 21.01 17.81 25.79
60 24.12 15.95 16.8
80 20.25 13.4 23.7
100 26.62 9.39 21.8
7
Our simulator is available at:
https://gitlab.inria.fr/lndjieng/fridsim/-/tree/master
CLOSER 2023 - 13th International Conference on Cloud Computing and Services Science
106

5.1.1 Simulation Scalability Evaluation
Equation (4) (Section 4.2) presents a generic function
for estimating the completion time of a i-order request
on a j-order Fog resource. We said in Section 4.3
that this function can be similar to a mathematical for-
mula, machine learning model or mapping object and
so on in our simulation (For each platform setting).
In our use case, we built machine learning mod-
els trying to find the optimal correspondence between
the data (e
i
, d
i
) and t
i j
according to the platform set-
ting. We thus first collected execution traces of the
human face detection service on 400 images for each
configuration of the Fog layer (1, 2, 3, 4 and 5 chetemi
nodes). Then a clustering algorithm (KMeans in our
case) was applied to 280 random occurrences of the
couple (e
i
, d
i
) in the dataset containing the 400 start-
ing couples. The value of the predicted completion
time for each triplet of a cluster was then the mean
value of the completion times of the couples of this
cluster. We evaluate the accuracy of the model like
the percentage of predictions whose absolute errors
relative to the actual values are less than a given tol-
erance. This tolerance should be as small as possi-
ble. The CDF on Fig. 7 gives the completion time
estimation model accuracy according to the tolerance
(and according to the number of nodes), and Table 3
gives the accuracy corresponding to 15 s according to
the number of cores. This accuracy increases with the
number of nodes, meaning that the simulation reaches
the scale-out property.
Figure 7: CDF according to the mean absolute error be-
tween real completion and prediction. Each chetemi node
has 20 cores. Reachy sends 400 requests to Fog nodes.
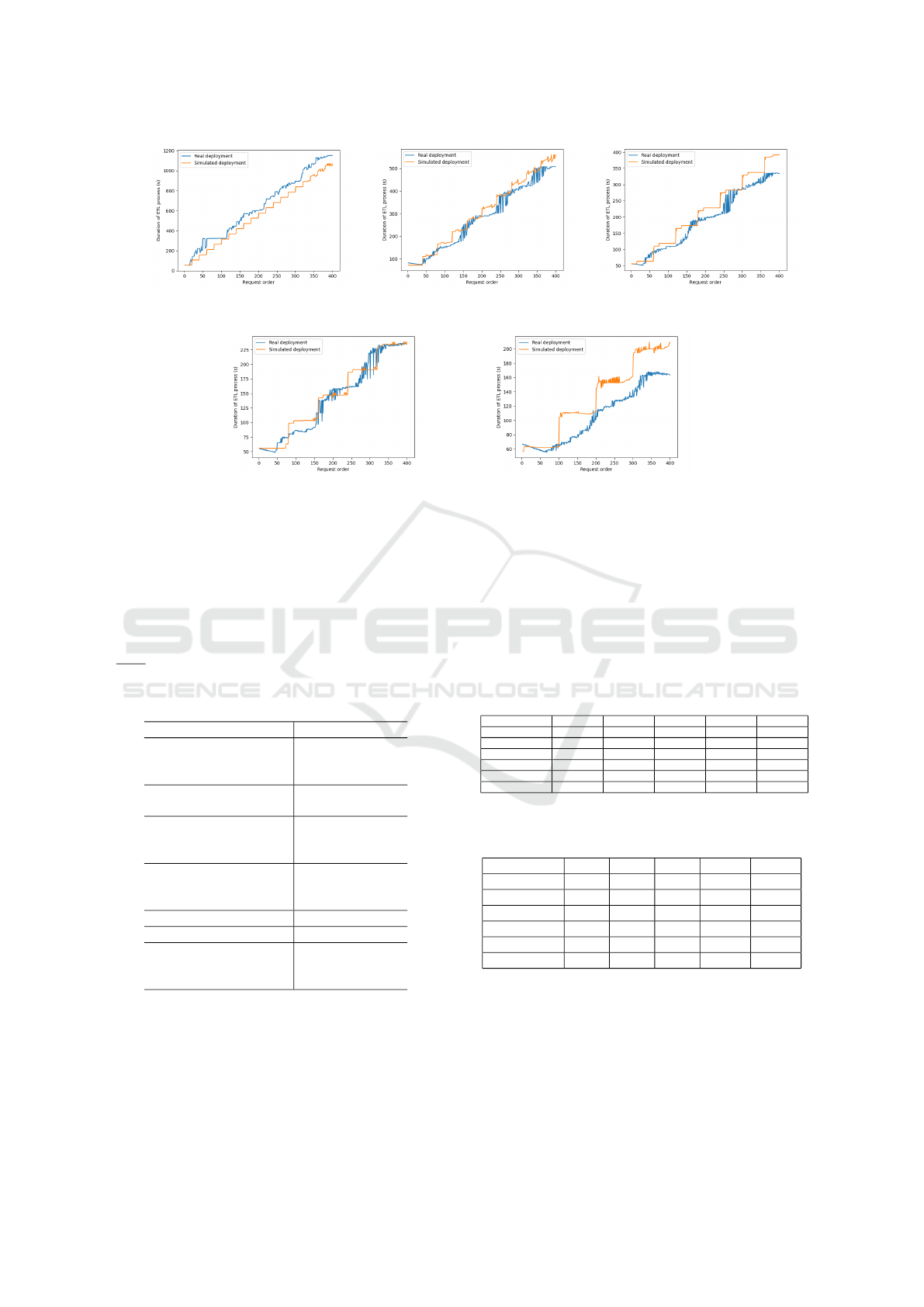
5.1.2 Simulation Accuracy Evaluation
Figure 8 gives the evolution of the life-cycle dura-
tion (in real and in simulation) according to the or-
der of the request sent for each configuration of the
Fog layer. This life-cycle consists of three steps (ex-
Table 3: Completion time accuracy for a tolerance of 15 s,
according to the number of nodes.
Number of cores Accuracy (%)
20 80.83
40 80.92
60 88.3
80 90.0
100 96.5
tract, transform and load) and is traced for each re-
quest in simulation and in real deployment to com-
pare both deployments. According to the number of
cores, the difference between both life-cycles dura-
tion in average is short (22.97 s by computing mean
value of CT MAE column of Table 2 giving an accu-
racy of 95% in average for the completion time esti-
mation model) . This tolerance can be considered as
short because it does not really have an impact on the
global makespan, completion time and duration of the
activity, since requests are asynchronous. Despite the
fact that the data communicated by the queries are of
the same order (because standard deviation of image
size distribution (Table 2) is very lower than the mini-
mum value of this distribution (Table 4)), the comple-
tion times in real life vary greatly (Table 2). This is
because at certain times there are many more requests
sharing the CPU than at other times. The simulation
follows this same observation well with respect to the
mean absolute errors of the completion time for each
configuration of the Fog layer highlighted in Table 2.
5.2 Fog Resource Needs Estimation
To implement SERFRI on the use case presented in
Section 2, we consider that Fog instances have simi-
lar characteristics to OVHCloud instances
8
designed
for data analysis and data-science uses: r2-15, r2-30,
r2-60 , r2-120 and r2-240. We simulate the platform
scenario made-up of : 2, 4, 8, 16, 32 and 64 resources
for each of OVHCloud instance types considered. We
present first the simulation settings, then the pareto
optimization and finally the SERFRI steps: (i) phi-
transformation
9
, (ii) sigma-transformation
10
and re-
sult expression.
5.2.1 Settings
To perform the simulations with these new instances,
we do not rebuild an estimation model but we rely on
the models built with the chetemi nodes. Indeed, with
regard to Equation (6)), the workload of a request i
8
Cloud pricing: Comparison of public Cloud offers-
OVH, https://www.ovhCloud.com/fr/public-Cloud/prices/
9
The application of φ function
10
The application of σ function
Simulation-Based Estimation of Resource Needs in Fog Robotics Infrastructures
107
(a) 1 chetemi node: 20 process-
ing cores.
(b) 2 chetemi nodes: 40 pro-
cessing cores.
(c) 3 chetemi nodes: 60 pro-
cessing cores.
(d) 4 chetemi nodes: 80 processing
cores.
(e) 5 chetemi nodes: 100 processing
cores.
Figure 8: Requests life-cycle durations. Comparison between Real and Simulation deployments.
on a resource j with speed v
j
is written W
i j
= t
i j
× v
j
,
in the same way, this request processed by another
type of resource of order j with speed v
0
j
will have
a workload that will be written W
i j
= t
0
i j
× v
0
j
. This
allows us to deduce the desired completion time: t
0
i j
=
t
i j
×v
j
v
0
j
.
Table 4: Simulation settings.
Number of requests 5000
Frequency
(number of
requests/second)
7
Maximum number
of instances
64
Bandwidth between
Edge and
Fog Layers (Mbps)
20
Latency between
Edge and
Fog Layers (s)
0.005
Data sizes range (B) 420000 - 480000
Response json size (B) 62
Instances
(ovh Cloud instances)
r2-15, r2-30,
r2-60, r2-120,
r2-240
Table 4 gives the values of the simulator inputs.
Regarding the characteristics of the instances, the
level of granularity is very low, because we consider:
the memory, the storage, the number of cores, the re-
sources cost per unit of time, the clock frequency, the
maximum number of operations per instruction cycle
and bandwidth in a public network. Requests sizes are
randomly generated between 420000 B and 480000
B, and we keep this same distribution for all deploy-
ment scenarios of the use case.
5.2.2 The Pareto Optimization
Table 5: Makespan (in second) by resource type and con-
figuration.
Configuration R2-15 R2-30 R2-60 R2-120 R2-240
2 82182.11 82182.11 41138.88 20610.64 10253.34
4 41138.88 41138.88 20610.64 10592.45 5591.26
8 20610.64 20610.64 10592.45 5591.26 2690.48
16 10592.45 10592.45 5591.26 2772.42 1530
32 5591.26 5591.26 2772.42 1530 869.8
64 2772.42 2772.42 1530 869.8 494.5
Table 6: Financial cost (in euro) by resource type and con-
figuration.
Configuration R2-15 R2-30 R2-60 R2-120 R2-240
2 4.43 5.12 5.01 5.04 4.95
4 4.45 5.14 4.98 5.09 5.13
8 4.41 5.1 5.01 5.14 5.05
16 4.46 5.15 5.03 5.12 5.22
32 4.45 5.14 5.04 5.28 5.44
64 4.44 5.13 5.16 5.46 6.4
Table 5 and Table 6 present the makespan and
financial costs of using Fog resources, respectively.
They are therefore the matrices we referred to in
Section 4.4. The graphical transcription of Table 5
(Fig. 9) shows that the makespan decreases as the
number of resources increases and more so when the
type of resources is more powerful. The graphical
transcription of Table 6 (Fig. 10) , on the other hand,
CLOSER 2023 - 13th International Conference on Cloud Computing and Services Science
108
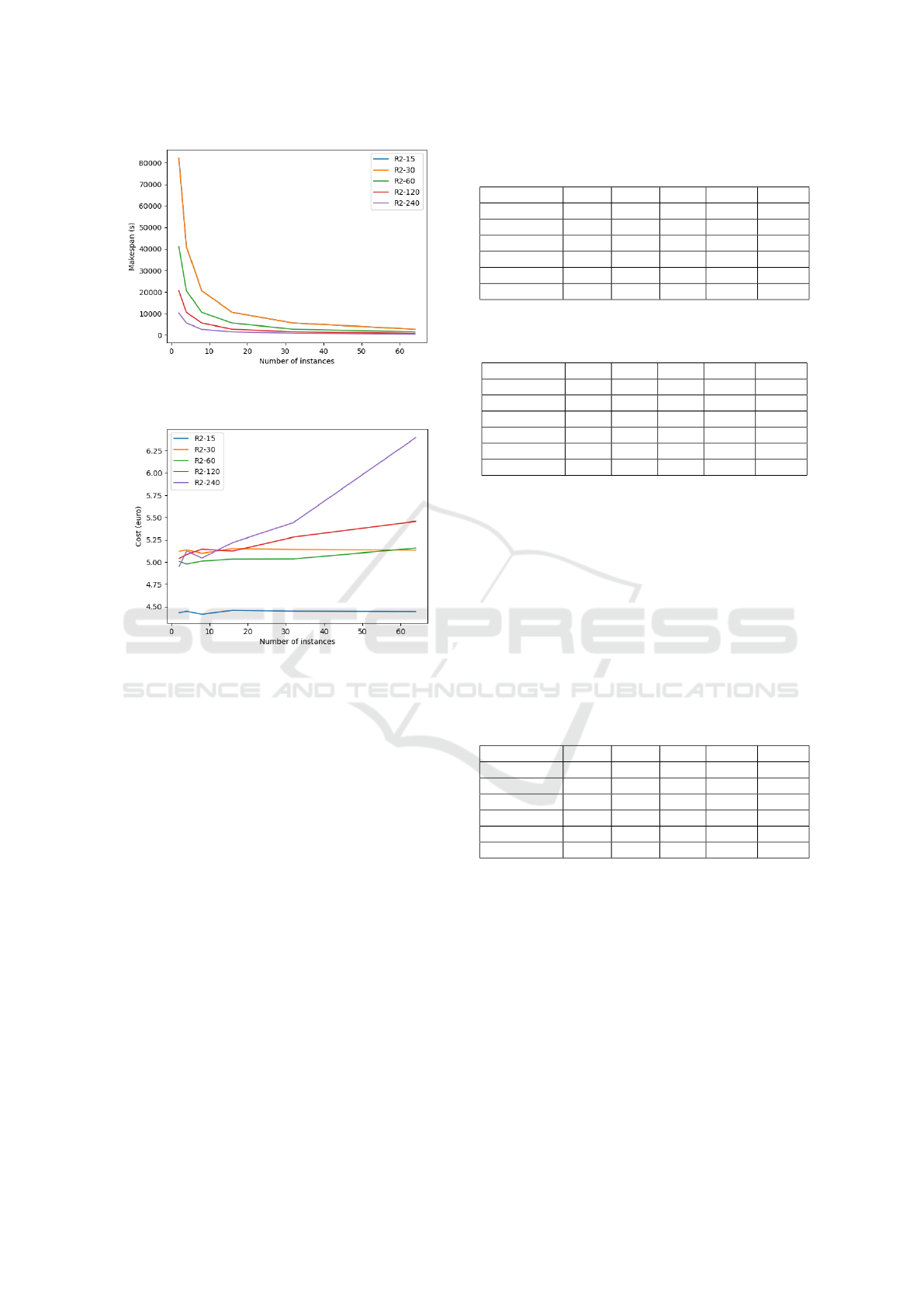
Figure 9: Makespan by the number of resources for each
type of resource.
Figure 10: Financial cost by the number of resources for
each type of resource.
grows as the number of resources increases and more
so when the type of resources is more powerful, that
makes the optimization very difficult. By naively ap-
plying Pareto optimization to reduce the makespan
and the cost of using resources as much as possible,
we obtain the following Pareto front: {(r2-15, 8), (r2-
15, 64), (r2-60, 64), (r2-240, 8), (r2-240, 32), (r2-240,
64)}.
5.2.3 Phi-Transformation
Table 7 and Table 8 represent the normalized (phi-
transformed tables obtained by applying φ function of
Equation (7)) tables from Table 5 and Table 6 respec-
tively. In other words, we look for the smallest ele-
ment in Table 5 and we calculate for each element of
this table the relative error with respect to this smallest
element, and the same thing is done for the Table 6.
This allows to bring the makespan and the financial
cost into the same dimensional space. The makespan
decreases according to the number of resources and
the power of resources, but it is an inverted observa-
tion for the financial cost ratio. The Pareto front is the
same front presented in Section 5.2.2.
Table 7: Makespan ratios by resource type and configura-
tion.
Configuration R2-15 R2-30 R2-60 R2-120 R2-240
2 165.19 165.19 82.19 40.68 19.73
4 82.19 82.19 40.68 20.42 10.31
8 40.68 40.68 20.42 10.31 4.44
16 20.42 20.42 10.31 4.61 2.09
32 10.31 10.31 4.61 2.09 0.76
64 4.61 4.61 2.09 0.76 0
Table 8: Financial cost ratios by resource type and configu-
ration.
Configuration R2-15 R2-30 R2-60 R2-120 R2-240
2 0 0.16 0.14 0.14 0.12
4 0.01 0.17 0.13 0.15 0.16
8 0 0.16 0.14 0.17 0.15
16 0.01 0.17 0.14 0.16 0.18
32 0.01 0.17 0.14 0.2 0.23
64 0.01 0.16 0.17 0.24 0.45
5.2.4 Sigma-Transformation
This transformation applies the σ function (Equation
8) on normalized matrices. Maximizing these matri-
ces (Table 7 and Table 8) leads to the creation of the
Table 9, according to the Equation (8), from which we
can determine the minimum element and therefore the
solution of the Pareto front that in practice is the most
efficient in terms of time and financial cost: (r2-240,
64). It is indeed, because compared to the other Pareto
solutions, it saves much more time than it costs.
Table 9: Maximized ratios by resource type and configura-
tion.
Configuration R2-15 R2-30 R2-60 R2-120 R2-240
2 165.19 165.19 82.19 40.68 19.73
4 82.19 82.19 40.68 20.42 10.31
8 40.68 40.68 20.42 10.31 4.44
16 20.42 20.42 10.31 4.61 2.09
32 10.31 10.31 4.61 2.09 0.76
64 4.61 4.61 2.09 0.76 0.45
6 CONCLUSION
In this article we address the estimation of Fog re-
source requirements (number of resources, memory,
computing and storage capacity of each resource) of
robotics applications. We then proposed an approach
(SERFRI) for estimating static and homogeneous Fog
resource needs based on the simulation of the deploy-
ment of Fog Robotic infrastructures. This approach
aims at providing the best resource type and the best
number of them, compromising the reduction at best
of the makespan and the one of the financial cost of
Simulation-Based Estimation of Resource Needs in Fog Robotics Infrastructures
109

using these Fog resources. We implement the ap-
proach on an existing use case (Reachy) which could
also have industrial vocation. The validation of the
simulator on which the approach is based consisted
mainly on the validation of the machine learning mod-
els used (accurate on average at 95 % with a predic-
tion margin of 23 s for each request, not really im-
pacting the global life-cycle duration of the applica-
tion) to estimate the request completion time. This
approach can therefore, also greatly help industrial
companies (and/or those who base their activities on
the use of robots) to have an approximate idea of the
budget required for the activities of their robots on
Fog resources. This approach also saves the finan-
cial budget and the use of the robot’s battery, allow-
ing it to perform more tasks. However, a similar ap-
proach should be implemented in the generic case of
platform, where Fog resources are heterogeneous and
dynamic and robots are mobile. The study indeed de-
serves reflection because it is not just an implementa-
tion of the knapsack problem as in the case of static
heterogeneous resources.
ACKNOWLEDGEMENTS
We are deeply grateful to all those who played a
role in the success of this project. We would like
to thank Interreg AiBLE and REACT-EU UV-Bot for
their support throughout the research process.
REFERENCES
Aazam, M. and Huh, E.-N. (2015). Fog computing mi-
cro datacenter based dynamic resource estimation and
pricing model for iot. In 2015 IEEE 29th International
Conference on Advanced Information Networking and
Applications, pages 687–694.
Casanova, H., Giersch, A., Legrand, A., Quinson, M.,
and Suter, F. (2014). Versatile, scalable, and accu-
rate simulation of distributed applications and plat-
forms. Journal of Parallel and Distributed Comput-
ing, 74(10):2899–2917.
Chen, Y. and Hu, H. (2013). Internet of intelligent things
and robot as a service. Simulation Modelling Practice
and Theory, 34:159–171.
Deb, K., Pratap, A., Agarwal, S., and Meyarivan, T. (2002).
A fast and elitist multiobjective genetic algorithm:
Nsga-ii. IEEE transactions on evolutionary compu-
tation, 6(2):182–197.
Garcia, J., Sim
´
o, E., Masip-Bruin, X., Mar
´
ı-Tordera, E., and
S
`
anchez-L
´
opez, S. (2018). Do we really need cloud?
estimating the fog computing capacities in the city of
barcelona. In 2018 IEEE/ACM International Con-
ference on Utility and Cloud Computing Companion
(UCC Companion), pages 290–295.
Gudi, S. C. et al. (2017). Fog robotics: An introduction.
In IEEE/RSJ International Conference on Intelligent
Robots and Systems.
Gupta, H., Vahid Dastjerdi, A., Ghosh, S. K., and Buyya,
R. (2017). ifogsim: A toolkit for modeling and
simulation of resource management techniques in
the internet of things, edge and fog computing en-
vironments. Software: Practice and Experience,
47(9):1275–1296.
Johnson, S. G. (2014). The nlopt nonlinear-optimization
package.
Kapitonov, A., Lonshakov, S., Bulatov, V., Kia, B., and
White, J. (2021). Robot-as-a-service: From cloud
to peering technologies. In 2021 The 4th Interna-
tional Conference on Information Science and Sys-
tems, pages 126–131.
Kattepur, A., Rath, H. K., and Simha, A. (2017). A-priori
estimation of computation times in fog networked
robotics. In 2017 IEEE international conference on
edge computing (EDGE), pages 9–16. IEEE.
Koubaa, A. (2014). A service-oriented architecture for vir-
tualizing robots in robot-as-a-service clouds. In In-
ternational Conference on Architecture of Computing
Systems, pages 196–208. Springer.
Kunde, C. and Mann, Z.
´
A. (2020). Comparison of simu-
lators for fog computing. In Proceedings of the 35th
annual ACM symposium on applied computing, pages
1792–1795.
Kwon, M., Biyik, E., Talati, A., Bhasin, K., Losey, D. P.,
and Sadigh, D. (2020). When humans aren’t opti-
mal: Robots that collaborate with risk-aware humans.
In 2020 15th ACM/IEEE International Conference on
Human-Robot Interaction (HRI), pages 43–52. IEEE.
Lera, I., Guerrero, C., and Juiz, C. (2019). Yafs: A simula-
tor for iot scenarios in fog computing. IEEE Access,
7:91745–91758.
Lopes, M. M., Higashino, W. A., Capretz, M. A., and Bit-
tencourt, L. F. (2017). Myifogsim: A simulator for
virtual machine migration in fog computing. In Com-
panion Proceedings of the10th International Confer-
ence on Utility and Cloud Computing, pages 47–52.
Mick, S., Lapeyre, M., Rouanet, P., Halgand, C., Benois-
Pineau, J., Paclet, F., Cattaert, D., Oudeyer, P.-Y., and
De Rugy, A. (2019). Reachy, a 3d-printed human-
like robotic arm as a testbed for human-robot control
strategies. Frontiers in neurorobotics, 13:65.
Moniz, A. B. and Krings, B.-J. (2016). Robots working with
humans or humans working with robots? searching
for social dimensions in new human-robot interaction
in industry. Societies, 6(3):23.
Mushunuri, V., Kattepur, A., Rath, H. K., and Simha, A.
(2017). Resource optimization in fog enabled iot de-
ployments. In 2017 Second International Conference
on Fog and Mobile Edge Computing (FMEC), pages
6–13. IEEE.
Ngatchou, P., Zarei, A., and El-Sharkawi, A. (2005). Pareto
multi objective optimization. In Proceedings of the
CLOSER 2023 - 13th International Conference on Cloud Computing and Services Science
110

13th international conference on, intelligent systems
application to power systems, pages 84–91. IEEE.
Norman, D. A. and Bobrow, D. G. (1975). On data-limited
and resource-limited processes. Cognitive psychology,
7(1):44–64.
Papazoglou, M. P. and Van Den Heuvel, W.-J. (2007). Ser-
vice oriented architectures: approaches, technologies
and research issues. The VLDB journal, 16(3):389–
415.
Quigley, M., Conley, K., Gerkey, B., Faust, J., Foote, T.,
Leibs, J., Wheeler, R., Ng, A. Y., et al. (2009). Ros: an
open-source robot operating system. In ICRA work-
shop on open source software, volume 3, page 5.
Kobe, Japan.
R. de Oliveira., E., Delicato., F., R. da Rocha., A., and
Mattoso., M. (2021). A real-time and energy-aware
framework for data stream processing in the internet
of things. In Proceedings of the 6th International Con-
ference on Internet of Things, Big Data and Security -
IoTBDS,, pages 17–28. INSTICC, SciTePress.
Ray, P. P. (2016). Internet of robotic things: Concept, tech-
nologies, and challenges. IEEE access, 4:9489–9500.
Sakovich, N. (2020). Fog computing vs. cloud computing
for iot projects.
Turnbull, L. and Samanta, B. (2013). Cloud robotics: For-
mation control of a multi robot system utilizing cloud
infrastructure. In 2013 Proceedings of IEEE South-
eastcon, pages 1–4. IEEE.
Velho, P. and Legrand, A. (2010). Accuracy study and
improvement of network simulation in the simgrid
framework. In 2nd International ICST Conference on
Simulation Tools and Techniques.
Zhao, W., Peng, Y., Xie, F., and Dai, Z. (2012). Model-
ing and simulation of cloud computing: A review. In
2012 IEEE Asia Pacific Cloud Computing Congress
(APCloudCC), pages 20–24.
Simulation-Based Estimation of Resource Needs in Fog Robotics Infrastructures
111
