
Exploring Functional Patterns of Driving Records by Interacting with
Major Classes and Territory Using Generalized Additive Models
Shengkun Xie
1
, Anna T. Lawniczak
2
and Clare Chua-Chow
1
1
Global Management Studies, Ted Rogers School of Management, Toronto Metropolitan University, Toronto, Canada
2
Department of Mathematics and Statistics, University of Guelph, Guelph, Canada
Keywords:
Generalized Additive Models, Rate-Making, Insurance Rate Regulation, Business Data Analytics.
Abstract:
Studying the safe driver index, such as Driving Records (DR), is essential to auto insurance regulation. Part
of the auto insurance regulation aims to estimate the relativity of major risk factors, including DR, to provide
some benchmark values for auto insurance companies. The risk relativity estimate of DR is often through
either an assessment via empirical loss cost or a statistical modelling approach such as using generalized
linear models. However, these methods are only able to give an estimate on an integer level of DR. This work
proposes a novel approach to estimating the risk relativity of DR via generalized additive models (GAM).
This method makes the integer level of DR continuous, making it more flexible and practical. Extending the
generalized linear model to GAM is critical as investigating this new method could enhance applications of
advanced statistical methods to the actuarial practice. Thus, making the proposed methodology of analyzing
the safe driver index more statistically sound. Furthermore, exploring functional patterns by interacting with
major classes or territories allows us to find statistical evidence to justify the existence of correlations between
risk factors. This may help address the issue of potential double penalties in insurance pricing and call for a
solution to overcome this problem from a statistical perspective.
1 INTRODUCTION
Risk factors play a major role in both auto insurance
pricing and rate regulation (Xie, 2021). Major risk
factors used in rate regulation may include Driving
Record (DR), Territory, and Type of Use (i.e., Class)
(Xie and Lawniczak, 2018). The major risk factors
are critical variables that can be used for this pur-
pose, and investigating these factors allows us to bet-
ter understand their key characteristics. From a reg-
ulation perspective, it is important to ensure that the
used model, the modelling process and their valida-
tion processes meet the requirements of regulatory
rules. It is also crucial for transparency that the pub-
lic know what driving characteristics affect the pre-
miums they pay. Although not always possible, insur-
ance companies try to set premiums based on risk fac-
tors and they may adjust premiums based on the loss
cost from preceding years after the review by regula-
tors. Changes in risk affect the premiums that auto
insurance companies charge and they are reflected in
the premiums drivers pay. However, drivers may see
these changes in premiums as discriminatory or unfair
because they need to be made aware of the insurers’
perception of risk variation. On the other hand, ex-
amining certain risk factors’ roles in affecting relativ-
ity also helps improve auto insurance fairness. This
is because risk classification of these factors needs
to be accurate for insurers to properly charge the in-
sured; otherwise, some will be overcharged, and oth-
ers will be undercharged. Identifying how auto insur-
ance companies classify risk by examining how rel-
ativity changes when we include certain risk factors
such as Type of Use gives the public more information
about how premiums are set (Abraham, 1985). This
increase in awareness allows more drivers to perceive
premiums as being fair from actuarial perspectives
(Meyers and Van Hoyweghen, 2018; Landes, 2015;
Frezal and Barry, 2020).
Many factors directly cause car accidents, such as
cell phone use, drug use, or alcohol use (Rolison et al.,
2018). They are considered as impaired driving when
a car accident happens, and there is a strong cause-
and-effect relationship between these factors and car
accidents. In auto insurance, a Driving Record (DR)
is created to represent a given driver’s accident his-
tory and this record is indicative of causing the in-
surance losses. Therefore, DR as a safe driver index
Xie, S., Lawniczak, A. and Chua-Chow, C.
Exploring Functional Patterns of Driving Records by Interacting with Major Classes and Territory Using Generalized Additive Models.
DOI: 10.5220/0012068900003541
In Proceedings of the 12th International Conference on Data Science, Technology and Applications (DATA 2023), pages 271-278
ISBN: 978-989-758-664-4; ISSN: 2184-285X
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
271

(Brown et al., 2004) plays a crucial role in auto insur-
ance pricing. In Canada, DR has 7 levels correspond-
ing to how many years a driver has not been involved
in a car accident. For example, when DR equals zero,
there are zero years that this driver has had no acci-
dent. This may imply that this driver recently had a
car accident or is a new driver with zero years of driv-
ing history. Because of this implication, for drivers
with a low driving record and no accident history, the
insurance premium may be double-penalized as other
risk factors are used to indicate a similar level of risk,
such as young driver class or a low number of years
of having a driver’s license. This may call for applica-
tion of statistical methods that can help to reveal the
potential interactions among risk factors more accu-
rately. From the statistical modelling point of view,
this may imply that modelling or analysis of loss data
may need to be conditioned on a certain level of an-
other risk factor. For example, the DR pattern may
depend on a level of Class (i.e., Type of Use) or a ter-
ritory level.
To better understand the relationship between in-
surance loss and considered risk factors, first, we ex-
amine the functional pattern of DR using general-
ized additive models (GAM) (Hastie, 2017; Wood,
2006). The GAM is an extension of generalized linear
models (GLM) that allows for flexibility by having
the response variable to be linear but explained using
functions that can uncover non-linear relationships
between the independent variables and its response
variable. GAM has been recently applied to auto in-
surance pricing, particularly for modelling telematics
data (Huang and Meng, 2019; Boucher et al., 2017;
Meng et al., 2022). The GAM constructed by us in
this paper was then extended by adding the Class fac-
tor of the driver and the Territory factor. The Class
factor has 14 different categorical levels and the Terri-
tory factor has 2 different levels, rural or urban. Class
and Territory are model factors in GAM which pro-
duce a separate smooth term for each level of Class
and Territory. Within this GAM modelling frame-
work, we combine two separate models that use loss
cost and premium as response variables into one. This
combination is possible because, when modelling loss
cost and premium, they are assumed to have the same
set of predictors. This combination of loss cost and
premium as a model response is particularly novel in
actuarial data analysis and it allows an overall better
estimate of risk factor relativities.
Furthermore, in this work, we propose using
GAM as an alternative approach to estimating DR
relativities, often derived from GLM in current actu-
arial practice (Ohlsson and Johansson, 2010). This
new method can help to de-couple the correlation be-
tween different risk factors and to avoid the double
penalty in auto insurance pricing when using multi-
plicative pricing algorithms. The obtained functional
patterns from GAM lead to a better understanding of
DR characteristics and how they are affected by other
major risk factors. The proposed method maintains
the model interpretability while sharing some power
from the machine learning approaches (Burka et al.,
2021; Denuit et al., 2021) by providing us with an
estimate of non-linear functional patterns of DR.
2 MATERIALS AND METHODS
2.1 Data
The data used in this paper comes from the Insur-
ance Bureau of Canada (IBC). The data sets con-
sist of aggregated loss costs, premiums, and expo-
sures used to calculate risk relativity for each driving
record level, class and other major risk factors. Loss
cost is defined as total losses (claim amount and ex-
penses used for settling claims) divided by the total
number of exposures. The premiums are the average
earned premiums. To systematically analyze loss cost
and premium, we define a dummy variable to indi-
cate whether the value for a particular combination of
driving record and class is the average loss cost (pure
premium) or average premium (rate). The value 1 in-
dicates that it is loss cost, and 0 means it is premium.
The response variable is denoted by LOSSPREM, and
its observation consists of loss cost or premium, de-
pending on which case. The data also are separated
by territory, rural or urban, where 1 indicates that it
corresponds to urban and 0 represents the rural area.
There are 3 major coverages that we focus on, Acci-
dent Benefit (AB), Collision (COL), and Third Party
Liability (TPL). Each coverage has three years of data
from 2009 to 2011, and we also include a summarized
data set that combines all three years. Exposures are
taken as weights for DR and Class to produce accu-
rate confidence intervals.
2.2 Extending GLM to GAM
As we mentioned earlier, the traditional approach to
estimating the risk relativity of each level of a given
risk factor is either through empirical measures based
on the relative level of loss costs or via a modelling
approach that includes a set of risk factors as inde-
pendent variables and the loss cost as the response
for some statistical models such as generalized lin-
ear models. However, the empirical measures of the
relative loss cost level for each combination of fac-
DATA 2023 - 12th International Conference on Data Science, Technology and Applications
272

Table 1: Definitions of four major classes used in this work. Note, the risk exposures for these four classes account for 92%
of the total risk exposures (i.e., the total number of vehicles per accident year).
Class 1 Principal operator is 25 years of age or over. Class 3 Principal operator is 25 years of age or over
No male driver under is 25 years of age; No male drivers are under 25 years of age.
no female drivers are under 25 years of age (not Automobile is used for business.
having a spouse or same-sex partner), Maximum 25% is used for business.
without driver training.
Not more than 2 drivers, per automobile, are in
the household, each of whom has held a
valid driver’s license for the past 3 years.
Class 2 Principal operator is 25 years of age or over. Class 7 No male drivers are under 25 years of age.
No male driver is under 25 years of age; no
female drivers are under 25 years of age (not
having a spouse or same-sex partner),
without driver training.
tor level can only serve as some benchmark values as
they lack statistical powers, which can be used to cap-
ture the randomness of loss cost. One of the problems
with using generalized linear models is that the esti-
mated risk relativities of DR may not be monotonic,
and this may further affect the stability of benchmark
values when it comes to regulation. In rate regula-
tion, the relativity of DR at each level must decrease
monotonically with the increase of years of no claims,
which takes values 0, 1, 2, . . ., but there is no guar-
antee of this required functional pattern when using
GLM modelling. The monotonic function of DR is
required, but the empirical estimate from the yearly
data does not guarantee this functionality. The GAM
model can assist in a better estimate of the overall pat-
tern of DR concerning the number of years without
accidents. To ensure a monotonic DR pattern, we fit
the data to a generalized additive model (GAM) in-
stead, which is given as follows:
Y
k
jlm
= γ
k
0 jlm
+ s(DR) + γ
k
1 j
Class
j
+
γ
k
2l
Territory
l
+ γ
k
3m
Source
m
+ ε
k
jlm
, (1)
where s() is a monotonic spline function used to es-
timate the relationship between DR and the response
variable, i.e. LOSSPREM, denoted by Y . γ and ε
stand for the model coefficients and model error, re-
spectively. k indicates which combination of accident
year and major coverage is considered. j indicates the
jth level of Class , l shows the lth level of Territory
and m indicates if it is for loss cost or premium. Using
GAM modelling, we impose the functionality of DR
with respect to the number of years of no accidents.
These splines are flexible functions that allow us to
model non-linear relationships as they determine the
shape of the trend to fit the data. Knots are the number
of joins for two or more polynomial basis curves. The
number of knots or the basis complexity chosen was
cross-validated, and it was selected as 5 in this work.
The R package used was ”mgcv”, and the monotonic
cubic spline was used to estimate the functional pat-
terns. This is considered a constrained spline for re-
gression problems. The log link function was used to
transform the response, and for all models, the error ε
in (1) is assumed to be Gamma distributed, the most
common distribution for auto insurance loss.
Another important aspect of estimating relativi-
ties for risk factors is to consider the interaction be-
tween different risk factors. For instance, in Figure
1, we show how loss cost patterns by DR interact
with Class and Territory variables. The curves inter-
act among levels of territory, particularly for Rural.
This may suggest that DR patterns depend on the lev-
els of Class and Territory. On the other hand, DR
patterns measured by premiums show that the inter-
action has been eliminated to some extent. There-
fore, including premium data in modelling will help
guide the estimate of relativity in the desired direction
to reduce the variability associated with the estimate.
However, in actuarial practice, it is not easy to incor-
porate excessive interactions to the model as consid-
ering too many interactions among different factors
will significantly decrease the number of exposures
associated with each interaction. This may further
cause the credibility of the estimated coefficient in the
model. To overcome this difficulty and improve the
interpretability of the model, we modified the model
in Equation (1) by introducing the interaction with
other major risks once at a time. This work considers
the interactions between DR and Class and between
DR and Territory. To do so, we further investigated
the functional patterns of DR, separated by a different
level of Class or a different Territory level, which are
given respectively as follows:
Y
k
lm
= γ
k
0lm
+ s(DR | Class) +γ
k
1l
Territory
l
+
γ
k
2m
Source
m
+ ε
k
lm
, (2)
Exploring Functional Patterns of Driving Records by Interacting with Major Classes and Territory Using Generalized Additive Models
273

(a) Urban, Loss Cost (b) Rural, Loss Cost
(c) Urban, Rate
(d) Rural, Rate
Figure 1: Empirical loss costs and premium rates by DR for Class 1, Class 2, Class 3 and Class 7 for AB coverage for 2009
accident year data. The values in Y-axis are in Canadian dollars.
Y
k
jm
= γ
k
0 jm
+ s(DR | Territory) + γ
k
1 j
Class
j
+
γ
k
2m
Source
m
+ ε
k
jm
. (3)
In both Models (2) and (3), model variables and
parameters remain the same as in Model (1), but the
spline function is conditioned on Class and Territory,
respectively. This implies that estimated functional
patterns of DR are either by Class or Territory, which
allows considering different levels of Class or Terri-
tory; thus resulting in different estimated curves. The
distributional assumption on ε and the link function
remains the same as in Model (1).
2.3 Estimating Risk Relativity for DR
Using GAM
Suppose the estimated functional pattern is denoted
by f (x), where x represents the DR level which is con-
sidered a continuous variable and takes values from 0
to the maximum level of DR allowed (in this work,
it is 6). The risk relativity of DR is then constructed
using the following equation, where r(x) is the esti-
mated risk relativity of DR at level x.
r(x) = f (x) − f (6) + 1. (4)
This proposed method takes the relative difference
between the values of the functions f obtained from
GAM for two different levels of DR, i.e., level x and
6, assuming the risk relativity at the highest level to
be one. This approach differs from the traditional ap-
proach, which focuses on the ratio of estimated val-
ues relative to the basis. On the other hand, the GAM
method ensures the estimate of DR by Class and by
Territory, which overcomes the unreasonable assump-
tion of a relationship among risk factors assumed to
be mutually independent.
3 RESULTS
Empirically, a monotonic decreasing pattern should
be observed as risk relativity should decrease when
the DR level increases. This is because drivers with
long records without getting into accidents should be
deemed less risky and thus they are charged lower
premiums. As a preliminary study we focus on the
investigation using yearly data for two reasons. The
first one is to illustrate how risk relativity can be esti-
mated using the results from GAMs. The second one
is to compare the DR patterns by accident year and
to show the variability of DR estimates due to differ-
ent accident year data. Since DR patterns are esti-
mated simultaneously by using loss costs and premi-
ums, these functional patterns of DR are considered as
an overall effect that better reflects their ground truth.
Figure 2 displays the functional patterns of DR for
four major classes. The obtained results correspond
to the AB coverage and the 2009 accident year data.
DATA 2023 - 12th International Conference on Data Science, Technology and Applications
274
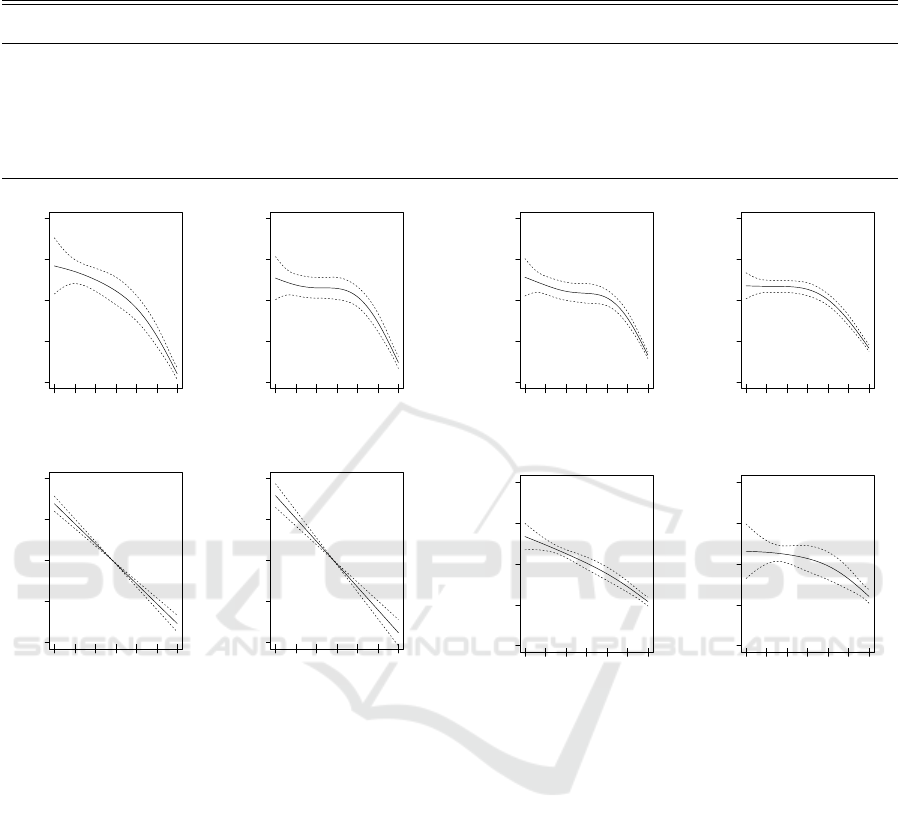
Table 2: Comparison of relativities of DR, separated by coverages. The relativities are obtained from modelling using GLM
and GAM and from empirical loss costs and premiums for the accident year 2009.
DR AB COL TPL
GLM GAM Loss Cost Premium GLM GAM Loss Cost Premium GLM GAM Loss Cost Premium
0 3.64 2.27 3.99 3.33 2.33 1.85 2.31 2.36 3.13 2.11 3.21 2.93
1 2.73 2.07 2.85 2.71 2.15 1.76 2.31 2.01 2.38 1.94 2.31 2.49
2 2.54 1.80 2.43 2.63 1.91 1.61 1.90 1.92 2.36 1.77 2.29 2.43
3 1.74 1.65 1.74 1.80 1.65 1.54 1.81 1.51 1.80 1.67 1.82 1.79
4 2.10 1.64 2.14 2.10 1.79 1.54 1.82 1.78 2.09 1.60 2.16 1.87
5 1.63 1.48 1.78 1.65 1.51 1.40 1.58 1.48 1.48 1.40 1.58 1.47
6 1.00 1.00 1.00 1.00 1.00 1.00 1.00 1.00 1.00 1.00 1.00 1.00
0 1 2 3 4 5 6
−1.0 −0.5 0.0 0.5 1.0
DR
s(DR,2.26):factor(CLASS)CLASS1
(a) Class 1
0 1 2 3 4 5 6
−1.0 −0.5 0.0 0.5 1.0
DR
s(DR,2.83):factor(CLASS)CLASS2
(b) Class 2
0 1 2 3 4 5 6
−1.0 −0.5 0.0 0.5 1.0
DR
s(DR,1):factor(CLASS)CLASS3
(c) Class 3
0 1 2 3 4 5 6
−1.0 −0.5 0.0 0.5 1.0
DR
s(DR,1):factor(CLASS)CLASS7
(d) Class 7
Figure 2: Functional patterns of DR for Class 1, Class 2,
Class 3 and Class 7 for AB coverage for 2009 accident year
data. The total risk exposures for these four classes account
for 92% of the vehicles.
We focus on the DR by major classes as the estimated
functional patterns are relatively stable. These four
major classes account for about 92% of risk expo-
sures. The definitions of these classes are given in
Table 1. The study based on the consideration of ma-
jor classes is more conclusive and may provide more
insights into DR. Thus, the results can serve as an im-
portant reference and be more beneficial for auto in-
surance companies. From these results, we observe
that the variability of estimates for smaller DR are
higher than for the larger DR levels. This is generally
true for all cases and will be discussed later. The main
reason for this high variability is the smaller amounts
of risk exposure for lower levels of DR, which corre-
sponds to the drivers who have had accidents in recent
years. Also, from the obtained results, we observe
0 1 2 3 4 5 6
−1.0 −0.5 0.0 0.5 1.0
DR
s(DR,2.9):factor(CLASS)CLASS1
(a) Class 1
0 1 2 3 4 5 6
−1.0 −0.5 0.0 0.5 1.0
DR
s(DR,2.75):factor(CLASS)CLASS2
(b) Class 2
0 1 2 3 4 5 6
−1.0 −0.5 0.0 0.5 1.0
DR
s(DR,1.47):factor(CLASS)CLASS3
(c) Class 3
0 1 2 3 4 5 6
−1.0 −0.5 0.0 0.5 1.0
DR
s(DR,1.55):factor(CLASS)CLASS7
(d) Class 7
Figure 3: Functional patterns of DR for Class 1, Class 2,
Class 3 and Class 7 for COL coverage for 2009 accident
year loss data. The total risk exposures for these four classes
account for 92% of the vehicles.
that the functional patterns of DR are decreasing with
the increase of DR levels for all major Classes. How-
ever, the function patterns are different from Class to
Class, which implies the interaction of Class and DR.
These findings confirm our expectations on the rela-
tionship between Class and DR, which is not inde-
pendent. Therefore, modelling loss cost or premium
using Class and DR one may has to further consider
such interaction, which may be extended to other fac-
tors if one has to consider.
The results obtained from COL and TPL are dis-
played in Figures 3 and 4, respectively. For these re-
sults, we observe that the functional patterns for Class
1 and 2 from the two considered coverages, COL and
TPL, do not appear to differ from those obtained from
the AB coverage. However, for Class 3 and Class 7,
Exploring Functional Patterns of Driving Records by Interacting with Major Classes and Territory Using Generalized Additive Models
275

0 1 2 3 4 5 6
−1.0 −0.5 0.0 0.5 1.0
DR
s(DR,2.63):factor(CLASS)CLASS1
(a) Class 1
0 1 2 3 4 5 6
−1.0 −0.5 0.0 0.5 1.0
DR
s(DR,2.48):factor(CLASS)CLASS2
(b) Class 2
0 1 2 3 4 5 6
−1.0 −0.5 0.0 0.5 1.0
DR
s(DR,1):factor(CLASS)CLASS3
(c) Class 3
0 1 2 3 4 5 6
−1.0 −0.5 0.0 0.5 1.0
DR
s(DR,1.77):factor(CLASS)CLASS7
(d) Class 7
Figure 4: Functional patterns of DR for Class 1, Class 2,
Class 3 and Class 7 for TPL coverage and 2009 accident
year loss data. The total risk exposures for these four classes
account for 92% of the vehicles.
especially for Class 7, the difference among the func-
tional patterns of DR for different coverages seems
to be large. This provides strong evidence of how the
DR functional pattern depends on or interacts with the
Class factor. This tells us that the assumption of inde-
pendence between DR and Class appears to be prob-
lematic when it comes to auto insurance policy pric-
ing. As the insurance pricing is done by coverage,
because of this interaction, it makes sense to model
the loss cost by estimating the relativity of DR, condi-
tioned on the Class factor. This may potentially elim-
inate the double penalty coming from the high-risk
groups, which is jointly determined by a set of highly
dependent factors.
To further investigate the functional patterns of
DR within a coverage but with a different level of
territory, i.e. Urban or Rural, we fitted our data to
GAM with the DR conditioned on the Territory vari-
able. The obtained results are reported in Figure 5.
The results show that the functional pattern of DR for
coverages of AB and COL does not deviate much be-
tween Urban and Rural, but the patterns are signifi-
cantly changed for TPL coverage. This may suggest
a low dependency between DR and Territory for AB
and COL coverage but a strong dependence between
them for TPL.
The above analysis demonstrates the potential in-
teraction between DR and other risk factors, i.e. Class
0 1 2 3 4 5 6
−1.0 −0.5 0.0 0.5 1.0
DR
s(DR,3.6):factor(TERRITORY)0
(a) AB, Rural
0 1 2 3 4 5 6
−1.0 −0.5 0.0 0.5 1.0
DR
s(DR,2.98):factor(TERRITORY)1
(b) AB, Urban
0 1 2 3 4 5 6
−1.0 −0.5 0.0 0.5 1.0
DR
s(DR,3.51):factor(TERRITORY)0
(c) COL, Rural
0 1 2 3 4 5 6
−1.0 −0.5 0.0 0.5 1.0
DR
s(DR,3.64):factor(TERRITORY)1
(d) COL,Urban
0 1 2 3 4 5 6
−1.0 −0.5 0.0 0.5 1.0
DR
s(DR,3.75):factor(TERRITORY)0
(e) TPL, Rural
0 1 2 3 4 5 6
−1.0 −0.5 0.0 0.5 1.0
DR
s(DR,2.38):factor(TERRITORY)1
(f) TPL,Urban
Figure 5: Comparison of functional DR patterns, separated
by coverage and territory (Urban and Rural) based on 2009
accident year loss data.
and Territory, used in rate regulation practice. Fur-
thermore, the decreasing patterns reasonably explain
how risk relativities will behave when derived using
the estimated function employing GAM. This may
suggest that a new risk measure of DR risk relativity
can be computed based on the functional pattern re-
sults obtained from GAMs, unlike the traditional ap-
proach of deriving risk relativity either empirically,
based on the loss cost, or by modelling based on
GLM. For the illustration purpose of using GAM,
we have computed the risk relativities and compared
these results with the relativities obtained from loss
cost, premium and GLM modelling. They are re-
ported in Table 2. For the relativity of DR at the whole
number scale, only the results obtained from GAM
meet the requirement of being monotonic. Also,
the results from GAM lower the relative difference
DATA 2023 - 12th International Conference on Data Science, Technology and Applications
276
0 1 2 3 4 5 6
1.0 1.5 2.0 2.5
DR
Relativity
2009AB
2009COL
2009TPL
2010AB
2010COL
2010TPL
2011AB
2011COL
2011TPL
(a) Class 1
0 1 2 3 4 5 6
1.0 1.5 2.0 2.5
DR
Relativity
2009AB
2009COL
2009TPL
2010AB
2010COL
2010TPL
2011AB
2011COL
2011TPL
(b) Class 2
0 1 2 3 4 5 6
1.0 1.5 2.0 2.5
DR
Relativity
2009AB
2009COL
2009TPL
2010AB
2010COL
2010TPL
2011AB
2011COL
2011TPL
(c) Class 3
0 1 2 3 4 5 6
1.0 1.5 2.0 2.5 3.0
DR
Relativity
2009AB
2009COL
2009TPL
2010AB
2010COL
2010TPL
2011AB
2011COL
2011TPL
(d) Class 7
Figure 6: DR relativities for Class 1, Class 2, Class 3
and Class 7 for different insurance coverage and accident
year combinations. The total risk exposures for these four
classes account for 92% of the vehicles.
among different levels, which may help address the
concern of having high relativity for the low level of
DR. The relativity associated with level zero obtained
from GAM is the smallest among all other cases.
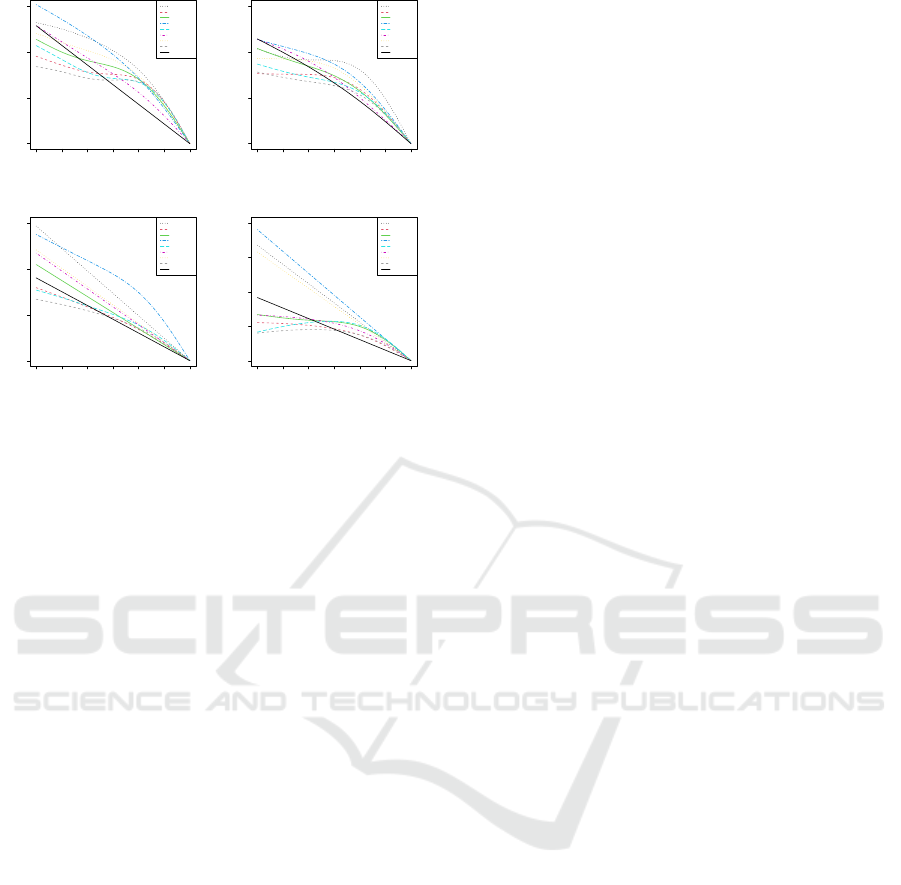
Finally, we study the risk relativity patterns of DR,
separated by different combinations of coverages and
accident years for each major class, to see how they
differ with a given class when the condition changes.
These relativity curves are presented in Figure 6. We
observe a considerable variation for Class 3 and Class
7, but functional variability for the curves with Class
1 and Class 2 are much smaller. Part of this vari-
ability may be due to the number of risk exposures,
as the total risk exposures for Class 1 and Class 2 is
much higher. The AB coverage has larger risk rela-
tivity spread for DR, especially for Class 7. Overall,
we can conclude that different combinations of acci-
dent and coverage for the different major classes have
different DR relativity patterns This may imply that
the analysis of loss cost and premium need to be done
by separating them by each combination. This also
indicates the dependency among all risk factors that
we considered, including coverages, accident years,
class, territory, and DR. Given the fact that low levels
of DR may be because of new drivers, it makes sense
to have relativity set to be lower than the ones from
Loss cost or other modelling methods based on the
loss cost. The fact that we constantly observe low val-
ues for DR relativities from GAM implies the sound-
ness of our proposed method to be an alternative ap-
proach for estimating DR relativities.
4 CONCLUDING REMARKS
Studying the safe driver index and other risk factors
in auto insurance rate regulation has been of an on-
going interest. Research on this topic has shown the
need for the development and application of advanced
statistical techniques to obtain an improved insights
into loss and premium data. By modelling the inter-
action between DR and Class using loss cost and pre-
mium data, while including other explanatory vari-
ables such as territory, we can uncover the different
patterns when looking at DR alone could not uncover
them. This work focused on using GAM to model
the functional relationship between DR and the re-
sponse variable with the inclusion of interaction fac-
tors, Class and Territory. We used GAMS to model
non-linear relationships captured by additive compo-
nents of splines. We further proposed to use the ob-
tained smooth functions of DR to derive its risk rela-
tivity.
Despite GAM requiring more computational
power due to its higher complexity than linear or gen-
eralized linear models, GAMs balance linear models
and black box machine learning models in terms of
interpretability and flexibility of the model used. Ex-
amining how specific risk factors predict the outcome
of risk relativities can give a better understanding of
what factors auto insurance companies find signifi-
cant. Extension of this work could investigate the
relationships of other risk factors that influence auto
insurance pricing, such as the interaction of gender
and age with driving records using GAMs. The flex-
ibility of GAM models can help uncover hidden pat-
terns between risk factors and risk relativity. The pro-
posed method can also be applied to other types of
economic and business data where the functional re-
lationship between independent variables and the de-
pendent variable need to be captured, and functional-
ity of some independent variables need to be embed-
ded.
ACKNOWLEDGEMENT
ATL acknowledges partial support from Natural Sci-
ences and Engineering Research Council of Canada.
REFERENCES
Abraham, K. S. (1985). Efficiency and fairness in insurance
risk classification. Virginia Law Review, pages 403–
451.
Boucher, J.-P., C
ˆ
ot
´
e, S., and Guillen, M. (2017). Exposure
Exploring Functional Patterns of Driving Records by Interacting with Major Classes and Territory Using Generalized Additive Models
277

as duration and distance in telematics motor insurance
using generalized additive models. Risks, 5(4):54.
Brown, R. L., Charters, D., Gunz, S., and Haddow, N.
(2004). Age as an insurance rate class variable.
Burka, D., Kov
´
acs, L., and Szepesv
´
ary, L. (2021). Mod-
elling mtpl insurance claim events: Can machine
learning methods overperform the traditional glm ap-
proach? Hungarian Statistical Review, 4(2):34–69.
Denuit, M., Charpentier, A., and Trufin, J. (2021). Autocal-
ibration and tweedie-dominance for insurance pricing
with machine learning. Insurance: Mathematics and
Economics, 101:485–497.
Frezal, S. and Barry, L. (2020). Fairness in uncertainty:
Some limits and misinterpretations of actuarial fair-
ness. Journal of Business Ethics, 167:127–136.
Hastie, T. J. (2017). Generalized additive models. In Statis-
tical models in S, pages 249–307. Routledge.
Huang, Y. and Meng, S. (2019). Automobile insurance clas-
sification ratemaking based on telematics driving data.
Decision Support Systems, 127:113156.
Landes, X. (2015). How fair is actuarial fairness? Journal
of Business Ethics, 128:519–533.
Meng, S., Wang, H., Shi, Y., and Gao, G. (2022). Improv-
ing automobile insurance claims frequency prediction
with telematics car driving data. ASTIN Bulletin: The
Journal of the IAA, 52(2):363–391.
Meyers, G. and Van Hoyweghen, I. (2018). Enacting ac-
tuarial fairness in insurance: From fair discrimina-
tion to behaviour-based fairness. Science as Culture,
27(4):413–438.
Ohlsson, E. and Johansson, B. (2010). Non-life insurance
pricing with generalized linear models, volume 174.
Springer.
Rolison, J. J., Regev, S., Moutari, S., and Feeney, A. (2018).
What are the factors that contribute to road accidents?
an assessment of law enforcement views, ordinary
drivers’ opinions, and road accident records. Accident
Analysis & Prevention, 115:11–24.
Wood, S. N. (2006). Generalized additive models: an intro-
duction with R. chapman and hall/CRC.
Xie, S. (2021). Improving explainability of major risk fac-
tors in artificial neural networks for auto insurance
rate regulation. Risks, 9(7):126.
Xie, S. and Lawniczak, A. T. (2018). Estimating major risk
factor relativities in rate filings using generalized lin-
ear models. International Journal of Financial Stud-
ies, 6(4):84.
DATA 2023 - 12th International Conference on Data Science, Technology and Applications
278
