
Characterizing Speed Performance of Multi-Agent Reinforcement
Learning
∗
Samuel Wiggins
1 a
, Yuan Meng
1 b
, Rajgopal Kannan
2 c
and Viktor Prasanna
1 d
1
Ming Hsieh Department of Electrical and Computer Engineering, University of Southern California, Los Angeles, U.S.A.
2
DEVCOM Army Research Lab, Los Angeles, U.S.A.
Keywords:
Multi-Agent Reinforcement Learning, AI Acceleration.
Abstract:
Multi-Agent Reinforcement Learning (MARL) has achieved significant success in large-scale AI systems and
big-data applications such as smart grids, surveillance, etc. Existing advancements in MARL algorithms focus
on improving the rewards obtained by introducing various mechanisms for inter-agent cooperation. However,
these optimizations are usually compute- and memory-intensive, thus leading to suboptimal speed perfor-
mance in end-to-end training time. In this work, we analyze the speed performance (i.e., latency-bounded
throughput) as the key metric in MARL implementations. Specifically, we first introduce a taxonomy of
MARL algorithms from an acceleration perspective categorized by (1) training scheme and (2) communi-
cation method. Using our taxonomy, we identify three state-of-the-art MARL algorithms - Multi-Agent
Deep Deterministic Policy Gradient (MADDPG), Target-oriented Multi-agent Communication and Cooper-
ation (ToM2C), and Networked Multi-agent RL (NeurComm) - as target benchmark algorithms, and provide a
systematic analysis of their performance bottlenecks on a homogeneous multi-core CPU platform. We justify
the need for MARL latency-bounded throughput to be a key performance metric in future literature while also
addressing opportunities for parallelization and acceleration.
1 INTRODUCTION
Reinforcement Learning (RL) is a crucial technique
for model development and algorithmic innovation in
data science. Multi-agent Reinforcement Learning
(MARL), an extension of single-agent RL, has shown
advancement in many big-data application domains
such as e-commerce (Choi et al., 2022) and surveil-
lance in large-scale systems (Ivan and Ivan, 2020).
Compared to single-agent RL, MARL introduces
agent-to-agent interactions using algorithm-specific
communication protocols. MARL also poses chal-
lenges in data processing since each agent generates a
large amount of data, which is high-dimensional and
correlated with the data from other agents. The speed
performance of processing data in MARL is critical
as MARL training is extremely time-consuming. In
a
https://orcid.org/0000-0002-0069-8213
b
https://orcid.org/0000-0001-6468-8623
c
https://orcid.org/0000-0001-8736-3012
d
https://orcid.org/0000-0002-1609-8589
∗
This work is supported by the U.S. National Science
Foundation (NSF) under grant CNS-2009057 and the Army
Research Lab (ARL) under grant W911NF2220159.
Deep MARL, using Deep Neural Network (DNN) as
a policy model, multiple autonomous agents interact
with a shared environment to achieve a joint goal. The
majority of state-of-the-art MARL algorithms utilize
DNNs, so we use MARL and Deep MARL inter-
changeably in this paper.
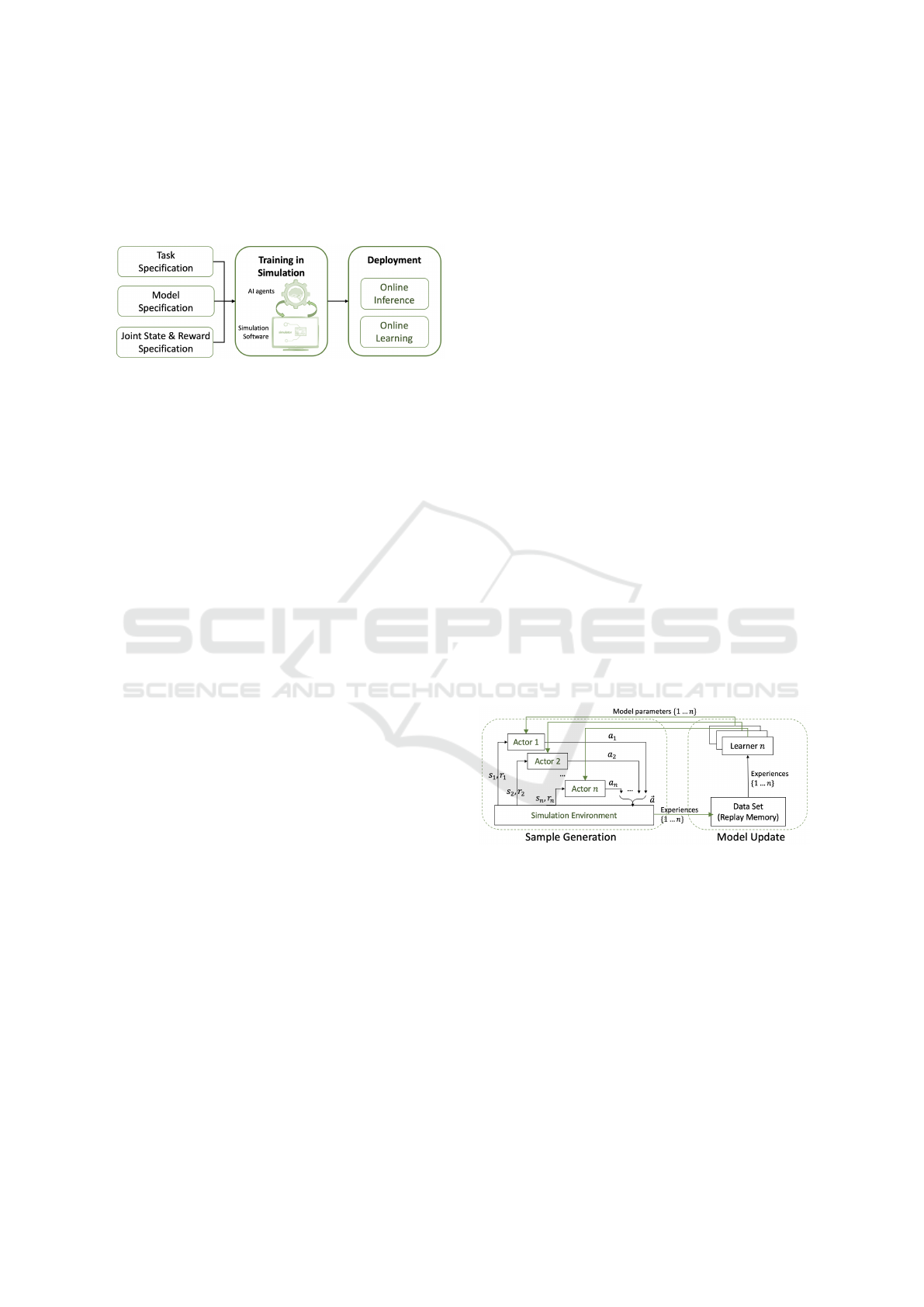
Figure 1 shows a high-level diagram of Deep
MARL in a real-world scenario. A typical work-
flow consists of two major stages: Training in Sim-
ulation and Deployment. In this paper, we focus on
Training using a simulation, which is the critical pro-
cess before deploying a MARL system into its actual
physical environment. This Training in Simulation
process is the most time-consuming part of MARL
system development, often taking days to months to
train an acceptable model (Kaelbling et al., 1996).
There has been extensive work accelerating this stage
for single-agent RL. However, Training in Simulation
for MARL systems brings non-trivial computational
challenges compared to single-agent scenarios due to
the requirement of facilitating inter-agent communi-
cations. There is a lack of literature on paralleliza-
tion and acceleration in a multi-agent setting stem-
ming from the omission of MARL system execution
Wiggins, S., Meng, Y., Kannan, R. and Prasanna, V.
Characterizing Speed Performance of Multi-Agent Reinforcement Learning.
DOI: 10.5220/0012082200003541
In Proceedings of the 12th International Conference on Data Science, Technology and Applications (DATA 2023), pages 327-334
ISBN: 978-989-758-664-4; ISSN: 2184-285X
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
327
time as a performance metric. In addition to focusing
on maximizing cumulative reward through novel al-
gorithmic optimizations, we argue that optimizing the
MARL system execution time through parallelization
and acceleration should be considered.
Figure 1: MARL application workflow.
In practice, the efficiency of developing and de-
ploying high-speed MARL systems is dependent
upon several factors such as the dependency require-
ment within RL execution loops, the various Compu-
tation intensities of MARL primitives, and the suit-
ability of the memory hierarchy. However, widely-
used homogeneous platforms (i.e., CPUs) cannot sat-
isfy all of the above factors simultaneously, leading to
various time overheads that prevent the MARL sys-
tem from achieving theoretical peak throughput. In
this paper, we provide a systematic empirical analy-
sis of the performance of three state-of-the-art MARL
algorithms - MADDPG, ToM2C, and NeurComm on
CPUs. To the best of our knowledge, this is the first
work that analyzes MARL algorithms from a speed
performance and acceleration point of view. The main
contributions of the paper are:
• We provide a taxonomy of MARL algorithms
from an acceleration point of view, summarize
their parallelization parameters and highlight the
computation characteristics of each category.
• We compare the timing breakdown and perfor-
mance scalability with respect to the paralleliza-
tion parameters of state-of-the-art MARL imple-
mentations on a multi-core CPU platform.
• We provide reasoning into why MARL system ex-
ecution time should be considered a key perfor-
mance metric, and show new acceleration chal-
lenges and opportunities that emerge.
2 BACKGROUND
2.1 Multi-Agent Reinforcement
Learning
We formulate the decision-making problem in
MARL as an n−agent Markov game (Shap-
ley, 1953), which can be defined as a tuple
S , A
1
, . . . , A
n
, R
1
, . . . , R
n
, T , γ
. In this tuple, 1...n is
the set of agents, S is the state space, A
i
is the ac-
tion space of agent i, R
i
: S × A 7→ R is the reward
function of agent i, T : S × A 7→ ∆(S ) denotes the
transition probability of each state-action pair to an-
other state, γ ∈ [0, 1) is a discount factor for future re-
wards. For agent i, we denote its policy as a probabil-
ity distribution over its action space π
i
: S → ∆
A
i
,
where π
i
(a
t
| s
t
) is the probability of taking action a
t
upon state s
t
at a certain time step t. By denoting the
other agents’ actions as a
−i
t
=
n
a
j
t
o
j̸=i
, we formu-
late the other agents’ joint policy as π
−i
a
−i
t
| s
t
=
Π
j∈{−i}
π
j
a
j
t
| s
t
. At each time step, actions are
taken simultaneously. Each agent i aims at finding its
optimal policy to maximize the expected return (cu-
mulative reward), defined as
E
(
s
t
,a
i
t
,a
−i
t
)
∼T ,π
i
,π
−i
"
∞
∑
t=1
γ
t
R
i
s
t
, a
i
t
, a
−i
t
#
(1)
From Equation 1, the optimal policy of agent i de-
pends not only on its own policy but also on the be-
haviors of other agents. Depending on the assump-
tions of how agents communicate, MARL policy op-
timization can be categorized into several scenarios
which will be further discussed in Section 3.
As shown in Figure 2, each iteration of the
Training-in-Simulation process can be divided into
the Sample Generation and Model Update phases. In
Figure 2: Training in Simulation.
the Sample Generation phase, the actor of each agent
takes the environment state as input to the DNN pol-
icy and inference an action. The joint action of all the
agents is simultaneously executed to transit to a new
state. This process is repeated until a preset maxi-
mum trajectory length value is achieved or a terminal
state is reached. At the end of the Sample Genera-
tion phase, the agents produce a batch of experiences
{s
t
,
−→
a
t
, r
t
, s
t+1
}. Then, in the Model Update phase,
the learner of each agent samples (mini-)batches of
experiences to train the DNN policy and propagate the
updated policy back to the actor of the same agent.
DATA 2023 - 12th International Conference on Data Science, Technology and Applications
328
2.2 Related Work
2.2.1 Reinforcement Learning Acceleration
There is a plural of work for parallelization and accel-
eration of single-agent RL. On general-purpose plat-
forms (i.e., CPU and GPU), existing work adopts
coarse-grained parallelism by deploying and dis-
tributing multiple actors and learners for the same
agent (Zhang et al., 2021; Liang et al., 2018), as
well as fine-grained parallelism within each actor or
learner for simulations, batched inference, and train-
ing (Rocki and Suda, 2011). Additionally, special-
ized hardware accelerators targeting specific single-
agent RL algorithms are developed (Cho et al., 2019;
Meng et al., 2021; Meng et al., 2020). However, not
all of these acceleration techniques can be trivially
adapted to MARL. This is because MARL poses dif-
ferent challenges. For example, the latency bottleneck
of MARL may become the overhead from coordina-
tion between agents, which is nonexistent in single-
agent RL.
2.2.2 MARL Implementation: Summary and
Challenges
Compared to single-agent RL, MARL leads to ad-
ditional problems in terms of increased state-action
complexity, partial observability from each agent,
and coordination requirement in cooperative settings.
Many MARL algorithms have been proposed and im-
plemented to address these problems, where their ma-
jor contributions are targeted toward learning to com-
municate effectively between RL agents. (Lowe et al.,
2017; Jiang et al., 2018) allow agents to perform in
the environment in a decentralized way with copies
of a shared neural network and enable instantaneous
communication between all the agents for training
the policies. (Chu et al., 2020; Wang et al., 2021)
propose dedicated compute modules to learn using a
shared graph for agents to decide whether and with
whom to communicate. These works focus on in-
creasing the sample efficiency and communication ef-
ficiency to improve the convergence rate to a high
joint reward. They are implemented on multi-core
CPUs, and computationally-intensive workloads such
as neural network training are offloaded to a GPU.
However, these implementations are usually highly
time-consuming. A unique challenge that impedes the
speed performance of MARL is the overheads from
communication. The compute primitives and mem-
ory modules for learning communication, including
message generation (e.g., Recurrent neural networks
(Kim et al., 2021)) and message propagation (e.g.,
Sparse linear algebra based on Graph Neural Net-
works (Jiang et al., 2018)), are tightly coupled with
agent policy training even though they have highly
dissimilar compute patterns and memory operations
compared to policy training. This leads to various
computation overheads that lower the effective hard-
ware utilization on CPU, which in turn impedes the
policy execution and training speed. In this paper, we
aim to characterize these overheads and identify ac-
celeration opportunities in MARL training.
3 A TAXONOMY OF MARL
ALGORITHMS
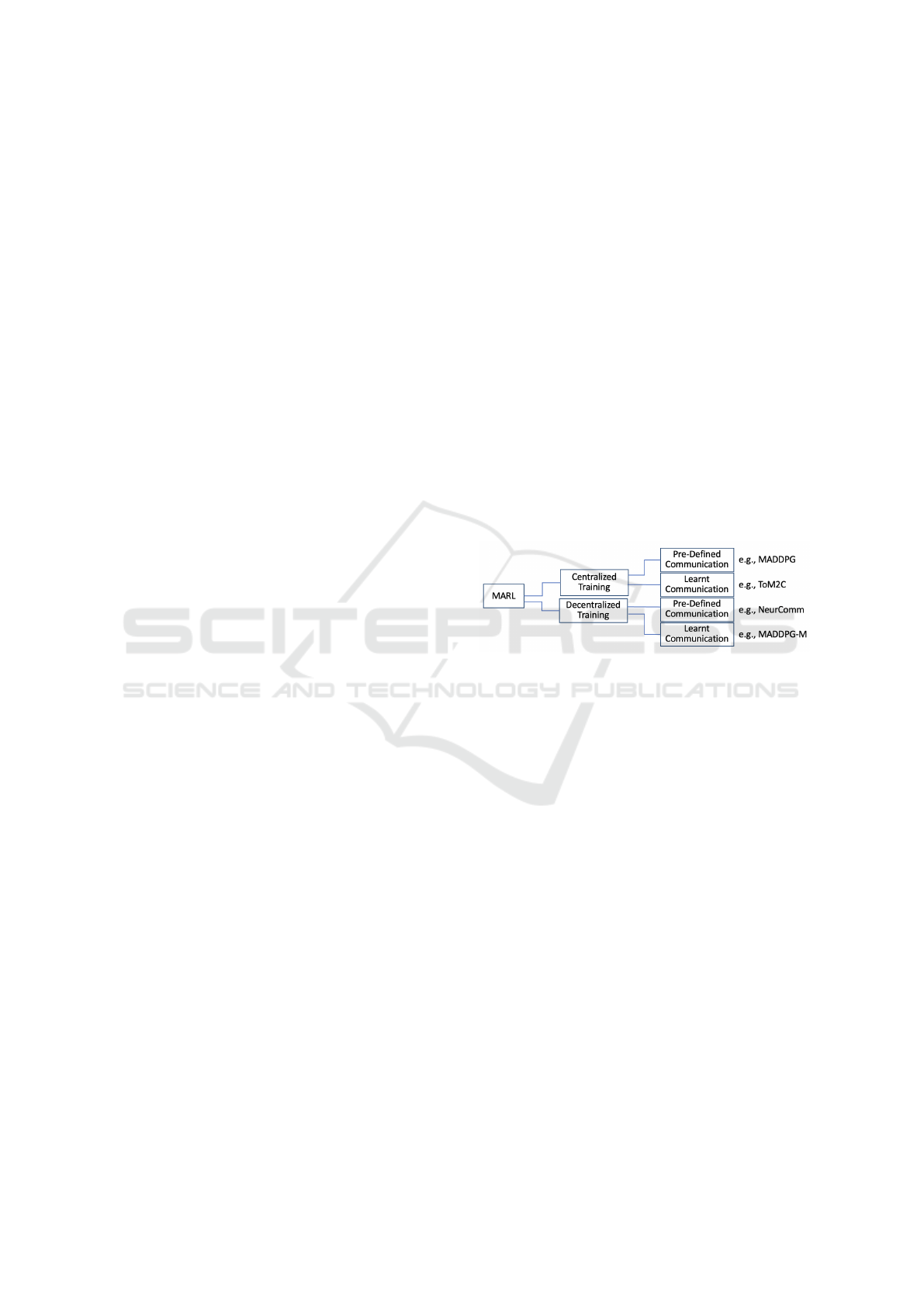
We illustrate a structural way of categorizing MARL
algorithms based on their computation characteristics
and major acceleration requirements. This is shown in
two dimensions: training scheme (centralized vs. de-
centralized) and communication method (pre-defined
vs. online learnt). Figure 3 shows example algorithms
in each category.
Figure 3: MARL Taxonomy.
3.1 Training Scheme
Based on the requirement of MARL applications,
each agent can learn in a decentralized way utilizing
respective local experiences, or in a centralized man-
ner where all the agents share a global pool of model
parameters and joint experiences.
Centralized Training - Decentralized Execution
(CTDE): In the Model Update phase under Central-
ized Training - Decentralized Execution (CTDE), a
centralized controller or learner is responsible for co-
ordinating the policy training of all the agents. The
centralized controller has access to global observa-
tions and rewards. Once the training is complete,
however, each agent executes its actions indepen-
dently, based on its own local observations, without
any further communication with the centralized con-
troller. Communication is required during Model Up-
date and is usually implemented using a shared mem-
ory architecture on modern CPUs and GPUs (Wang
et al., 2021; Lowe et al., 2017).
Decentralized Training: In Decentralized Training,
each agent in the system learns its own policy with-
out direct access to the experiences of other agents in
Characterizing Speed Performance of Multi-Agent Reinforcement Learning
329

the system. From the perspective of a single agent,
the environment becomes non-stationary due to the
co-adaption of the other agents, such that the pol-
icy learned can have a mismatched expectation about
the other agents’ policies. Without a centralized con-
troller, the problems of partial observability and non-
stationarity become more complex. Therefore, com-
munication that allows agents to exchange informa-
tion becomes a critical factor in the coordination of
their behaviors and overcoming the partial observabil-
ity and non-stationarity problems (Wang et al., 2022).
3.2 Communication Method
Communication Policy defines how to make the deci-
sions of ‘whom’ and ‘when’ to communicate with and
enable message transferring across agents. A commu-
nication policy can be either pre-defined or learnt.
Pre-Defined Communication. Pre-defined commu-
nication specifies a fixed communication protocol and
message format before the training process begins.
Agents may perform all-to-all communication (Lowe
et al., 2017), or capture the communication paths us-
ing a pre-defined graph that is associated with the
given application or environment (Chu et al., 2020;
Jiang et al., 2018).
Learnt Communication. Learnt communication of-
fers generalization abilities to more scenarios and
has become increasingly popular due to its flexibility.
One popular method is to adaptively learn the evolv-
ing node and edge features of the multi-agent system
represented as a dynamic graph (Wang et al., 2021).
4 LATENCY-BOUNDED
THROUGHPUT OF MARL
ALGORITHMS: AN ANALYSIS
4.1 Metrics and Parallel Parameters
4.1.1 Latency-Bounded Throughput
Given a particular algorithm and benchmark that as-
sumes a fixed sample complexity (i.e., the number
of iterations needed to reach a certain reward), the
primary metric for measuring MARL training speed
is the throughput in terms of the number of Itera-
tions executed Per Second (IPS). As the iterations in
Training-in-Simulation are sequential by nature, it is
hard to overlap consecutive iterations for faster con-
vergence (Cho et al., 2019; Meng et al., 2021), so
minimizing the latency of each iteration is critical for
high IPS throughput. Based on the Sample Genera-
tion and Model Update phases in each iteration (Fig-
ure 2), we formulate the throughput IPS as:
IPS =
1
T
iteration
=
1
⊛ (T
SG
, T
MU
)
, (2)
where T
SG
and T
MU
are the execution times of Sample
Generation and Model Update phases, respectively.
The operator ⊛(x, y) can be x + y or max(x, y) based
on whether the algorithm is on-policy (where Model
Update is strictly dependent on Sample Generation in
each iteration) or off-policy (where Sample Genera-
tion and Model Update phases can be overlapped).
In the following subsections, we provide a de-
tailed analysis of the main computation primitive la-
tency and throughput using representative algorithms
in different categories of MARL. We will show the
time breakdown and performance scalability with re-
spect to a few key parallel parameters.
4.1.2 Key Parallel Parameters
A MARL algorithm is defined using a plural of hyper-
parameters, where a subset of these hyper-parameters
affects the parallelism, data processing speed, and
latency-bounded throughput of the system. We define
the following terms relevant to the key parallel param-
eters that are common in all categories of MARL:
• Agent(s). Agents execute by interacting with the
environment and improving their policies.
• Actor(s). An actor is a process used by an agent to
perform the Sample Generation phase. An actor
infers on the agent’s policy to perform an action in
a simulation environment. Each agent can spawn
multiple actors implemented on multiple rollout
thread(s) defined below.
• Rollout Thread(s). A rollout thread is a CPU
thread used to execute the actor process. A rollout
thread has a local copy of the environment and
executes independently of the other actor/rollout
thread(s). Typically, each agent deploys multi-
ple actors, and each actor is mapped to a rollout
thread.
• Learner(s). A learner is the process used by
an agent to train its policy in the Model Update
phase. In CTDE, the learner is typically shared
by all the agents, so the number of learners in
the MARL system is 1. In Decentralized train-
ing, the number of learners is equal to the number
of agents.
DATA 2023 - 12th International Conference on Data Science, Technology and Applications
330
4.2 Centralized Training with
Knowledge Concatenation
Multi-Agent Deep Deterministic Policy Gradient
(MADDPG) falls under the Centralized Training De-
centralized Execution category with pre-defined all-
to-all communication using knowledge concatenation
(Lowe et al., 2017). In MADDPG, each agent is
composed of four DNN models: (1) The Policy net-
work (i.e., decentralized actor) executes on the envi-
ronment using only local information independent of
other agents. (2) The Value network (i.e., centralized
critic) helps train the actor’s policy. Although it is
considered centralized, each agent still trains its own
value network. The training is centralized in the sense
that the inputs to each value network depend on the
action and observations (i.e., transition information)
of all agents. (3,4) The Target Policy and Target Value
network are used for training stability.
In the MADDPG implementation, multiple rollout
threads are deployed to sample the environment us-
ing the policies from the decentralized actors, where
the transition information is stored in a global replay
buffer. Multiple training threads can then use this
information to train the various DNN networks de-
scribed above.
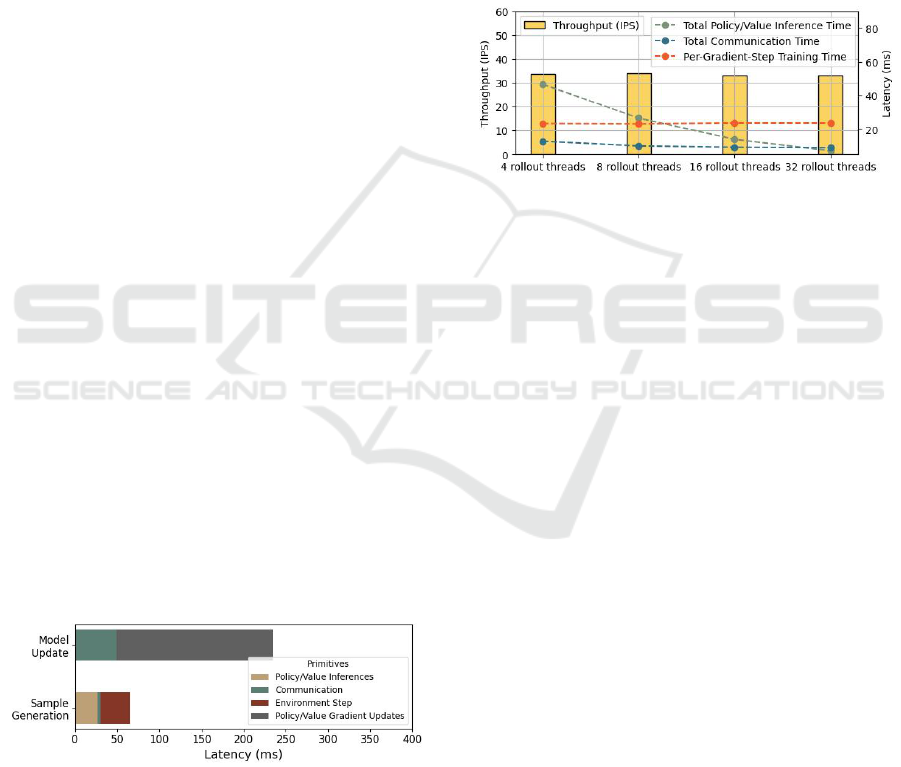
During Sample Generation, each agent samples
an action using its policy and executes it in the en-
vironment. The latency breakdown among Policy In-
ference, Communication, and Environmental Steps in
one iteration is displayed in Figure 4. During Model
Update, training occurs in an actor-critic fashion simi-
lar to the single-agent variant of MADDPG: Deep De-
terministic Policy Gradient (DDPG) (Lillicrap et al.,
2015). Overall, we observe that communication in the
sample generation and model update phase is not the
dominating factor in terms of latency during Training
in Simulation, which is attributed to the straightfor-
ward insertion and concatenation of transition infor-
mation.
Figure 4: MADDPG Training in Simulation Breakdown (8
rollout threads, 1 training thread).
We observe that the actor/critic policy and value
updates are the dominating factor in terms of latency
when varying the number of rollout threads as seen in
Figure 5. In the Sample Generation phase, the fixed
amount of data generation takes a shorter amount
of time since multiple parallel actors sample copies
of the environment simultaneously while adding to
the replay buffer. During the Model Update phase,
latency for each gradient update step remains un-
changed with respect to the number of rollout threads.
This is expected given that training for each agent
happens using a single thread sequentially regardless
of the number of rollout threads. Increasing the num-
ber of rollout threads does increase the number of
gradient steps needed to complete the model update
phase in MADDPG. These additional steps cause the
overall system throughput (IPS) to remain consistent.
Figure 5: MADDPG Training Throughput Scalability vary-
ing rollout threads.
4.3 Centralized Training with Learnt
Communication
ToM2C (Target-oriented Multi-agent Communication
and Cooperation) is a recent work under the CTDE
training scheme (Wang et al., 2021). In ToM2C, each
agent learns its actions based on its local observation
space along with inference of the mental states of oth-
ers and learns the communication paths for enhancing
cooperation. Specifically, it comprises four functional
DNN models: (1) The Observation Encoder is a fully-
connected DNN layer that encodes the agent’s local
observation into a single feature using a weighted sum
mechanism. (2) The Theory of Mind network (ToM
Net) is a 2-layer Multi-Layer Perceptron on a Gate
Recurrent Unit that estimates the joint intention of all
the other agents. (3) The Message Sender is a Graph
Neural Network (GNN) that uses the ToM Net out-
put to decide the communication graph structure. (4)
The Decision Maker (i.e., policy model) learns the ac-
tions once the agent receives all the messages based
the communication graph returned by the Message
Sender of all other agents.
In the ToM2C implementation, multiple actors on
different rollout threads are used to generate datasets
and store them in a shared buffer; a single training
thread then uses the data from the shared buffer to up-
date the policy, ToM Net, and GNN described above.
During Sample Generation, each actor sequen-
tially performs inference through the four DNN mod-
Characterizing Speed Performance of Multi-Agent Reinforcement Learning
331
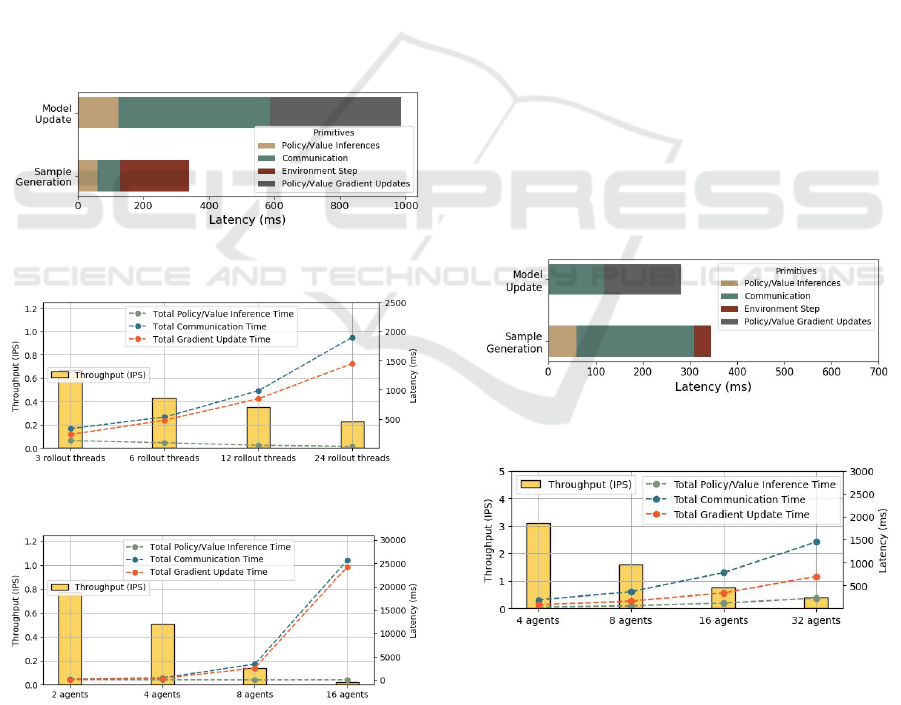
els. The time breakdown among Policy Inference,
Communication, and Environmental Interaction in
one iteration is shown in Figure 6. During Model Up-
date, the training is performed in an actor-critic man-
ner (Mnih et al., 2016), where a centralized critic (i.e.,
Value network) shared by all the agents obtain global
feature of the states to compute their values and facil-
itate the training of the policy network (i.e., the Deci-
sion Maker).
Overall, different from MADDPG which also fol-
lows the CTDE scheme, in ToM2C we observe a non-
trivial overhead from learning of communication in
the training pipeline. This is due to the added com-
putation complexity from inferring other agents’ in-
tentions and deciding the communication paths using
a graph representation of the global states of all the
agents. On the other hand, the overheads from com-
munication during agents execution (Sample Genera-
tion) are smaller compared to that in the Model Up-
date, since the decentralized execution only requires
each actor to perform one-pass inference on its own
models.
Figure 6: ToM2C Training in Simulation Breakdown (6
rollout threads, 1 training thread).
Figure 7: ToM2C Training Throughput Scalability varying
the number of rollout threads.
Figure 8: ToM2C Training Throughput Scalability varying
the number of agents.
In Sample Generation, adding rollout threads in-
creases the data generation throughput (number of
samples generated in unit time) without increasing
the total latency needed for each actor to collect data,
as shown in Figure 7. The actors and the learner
use separate threads and only synchronize through
a shared buffer; the Sample Generation and Model
Update phases can run concurrently. Therefore, the
latency of actors is completely hidden by the train-
ing process, such that increasing the number of roll-
out threads does not lead to higher system throughput
(IPS).
Figure 8 shows the execution time and IPS scal-
ability with increasing the number of agents coop-
erating in the same environment, with a fixed num-
ber of rollout threads serving each agent. We ob-
serve a faster rate of latency scaling (at approximately
8× increase in gradient update time as the number of
agents doubles). This factor is contributed by both
the increased state size (processed state size dou-
bles as the number of agents doubles) and the in-
creased communication (worst-time communication
complexity is the square of the number of agents).
This means both algorithmic optimization and hard-
ware acceleration for communication reduction are
needed to increase the scalability of communication-
learning MARL systems to a large number of agents.
4.4 Decentralized Training with
Pre-Defined Graph Communication
Figure 9: NeurComm Training in Simulation Breakdown (8
agents).
Figure 10: NeurComm Training Throughput Scalability
varying the number of agents.
NeurComm-enabled MARL follows the Decen-
tralized Training with Pre-Defined Communication
paradigm aimed at targetting networked Multi-agent
Reinforcement Learning (NMARL) scenarios, in-
cluding traffic light and wireless networks systems
(Chu et al., 2020). This is formulated using a spa-
DATA 2023 - 12th International Conference on Data Science, Technology and Applications
332
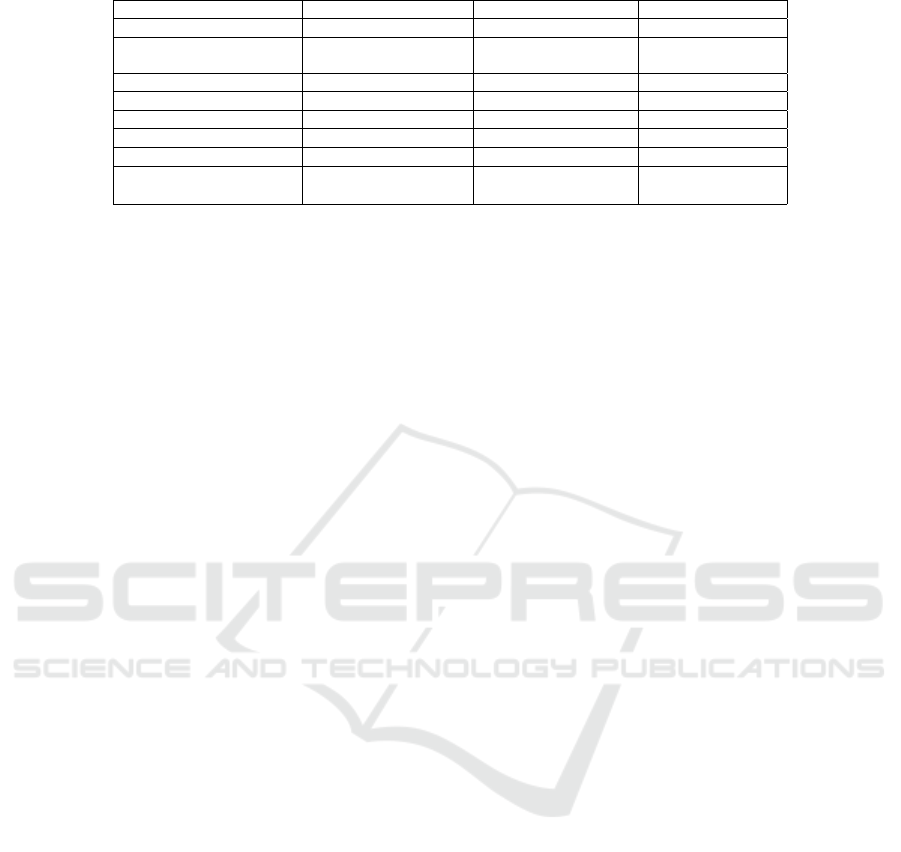
Table 1: Comparisons of target MARL algorithms.
Algorithm MADDPG ToM2C NeurComm
Training Scheme Centralized Centralized Decentralized
Communication Method
Pre-Defined,
All-to-all
Learnt
Pre-Defined,
Graph-based
T
Comm
%: Execution 5.89% 25.8% 72.2%
T
Comm
%: Training 21.1% 47.0% 42.4%
Parallel Rollout Support Yes Yes No
Parallel Training Support Yes No No
SG/MU Overlapping Yes Yes No
Cumulative Rewards
CN
1
: -2.75+-0.61
ATSC
1
: Not Supported
CN: -0.79+-0.39
ATSC: Not Supported
CN: Not Supported
ATSC: -136.1
1
Test Benchmarks: CN denotes Cooperative Navigation, ATSC denotes Adaptive Traffic Signal Control.
2
T
Comm
% stands for Communication Time Percentage.
tiotemporal Markov Decision Process, where each
agent’s actions are learned based on the state and pol-
icy of neighboring agents. The main contributions of
this paper is a differentiable neural communication
protocol called NeurComm. NeurComm introduces
a message primitive called an agent’s “belief,” which
is propagated to the neighboring agents and optimizes
their performance iteratively. The additional commu-
nication overhead lies in the belief propagation func-
tion. Each decentralized agent uses the belief, local
states, and action probabilities of neighboring agents
in order to make a decision.
In this Decentralized NMARL using NeurComm
communication implementation, A2C agents are
used, which follow an on-policy actor-critic method
(Mnih et al., 2016). Figure 9 shows the Training in
Simulation breakdown of NeurComm during one iter-
ation of Sample Generation and Model Update. Dur-
ing Sample Generation, messages are received and
sent while control is performed. During Model Up-
date, each agent’s belief is updated along with the gra-
dients of the actor, critic, and neural communication
network. Overall, we observe that communication
takes up a large percentage of the total execution time
during an iteration of Sample Generation and Model
Update.
NeurComm lacks a parallel setup and instead uti-
lizes a single thread for both the Sample Generation
and Model Update phases. From Figure 10, we ob-
serve a 2× increase in all latency measurements when
the number of agents doubles. When increasing the
number of agents, various data structures, including
belief, agent states, number of policies, etc., also in-
crease in size proportionally. IPS decreases propor-
tionally with the number of agents, which is expected
given the single-threaded nature of this implementa-
tion and the increasing communication and state size.
While the addition of the belief primitive leads to opti-
mized control performance, each agent needs to com-
pute its own belief using the belief of other neighbor-
ing agents, leading to a large amount of communica-
tion and computation overhead.
4.5 Comparison of MARL Algorithms
Based on the analyses in Sections 4.2, 4.3 and 4.4,
we summarize some tradeoffs between these different
categories of algorithms and their parallel implemen-
tations in Table 1.
Comparison in Terms of Communication Meth-
ods. In CTDE (columns MADDPG and ToM2C of
Table 1, row “Cumulative Rewards”), it has been ver-
ified that learning to communicate through predicting
other agents’ future rollouts outperforms simple all-
to-all concatenation of current experiences. However,
learnt communication also leads to higher communi-
cation cost in both decentralized execution (Sample
generation) and centralized training (Model Update),
as shown in Table 1, rows “Communication Time Per-
centage,” where the time spent on generating the mes-
sage and data transfer for communication in ToM2C
accounts for 3 times larger percentage than that in
MADDPG. This calls for fine-grained acceleration of
training to alleviate the training bottleneck in MARL
frameworks supporting CTDE with learnt communi-
cation.
Comparison in Terms of Training Schemes. Note
that Centralized training vs. Decentralized training
implies different assumptions in terms of the acces-
sibility of global information on the joint policy. De-
centralized training can better support applications re-
quiring autonomous acting using local information
(e.g., traffic network, stock market), but each agent
needs to cope with a non-stationary environment due
to the instability of other changing and adapting
agents. In contrast, centralized training relies on a
controlling authority of all agents’ policies and faces
a stationary environment. However, the large (expo-
nentially increasing) joint policy space could be too
difficult to search. We observe that in order to learn
a stable policy, decentralized training relies more on
communication due to the lack of global information.
For instance, in NeurComm (Table 1, row “Commu-
nication Time Percentage: Agent Execution”), com-
munication accounts for as much as 70% of the to-
Characterizing Speed Performance of Multi-Agent Reinforcement Learning
333

tal training time. The additional overhead involves
DNN layer computation for the encoding and extrac-
tion of an agent’s belief. This additional communica-
tion overhead justifies the need for fine-grain acceler-
ation of the various added kernels.
5 DISCUSSION & CONCLUSION
In this work, we provided an extensive analysis of var-
ious MARL algorithms based on a taxonomy. This is
also the first work in the field of MARL that character-
izes key algorithms from a parallelization and acceler-
ation perspective. We proposed the need for latency-
bounded throughput to be considered a key optimiza-
tion metric in future literature. Based on our observa-
tion, the need for communication brings a non-trivial
overhead that needs fine-grained optimization and ac-
celeration depending on the category of the algorithm
described in our taxonomy. There is a plethora of fu-
ture work that can be conducted on MARL in terms
of acceleration:
• Specialized accelerator design for reducing com-
munication overheads: Specialized acceleration
platforms such as Field Programmable Gate Ar-
rays (FPGA) offer pipeline parallelism along with
large distributed on-chip memory that features
single-cycle data access. To take full advantage
of low-latency memory, specialized data layout
and partition for the communicated message pool
need to be exploited.
• Fine-grained Task Mapping using heterogeneous
platforms: We have seen the success of bringing
single-agent RL algorithm to heterogeneous plat-
forms composed of CPU, GPU and FPGA (Meng
et al., 2021; Zhang et al., 2023) and plan to extend
this to MARL.
REFERENCES
Cho, H., Oh, P., Park, J., Jung, W., and Lee, J. (2019). Fa3c:
Fpga-accelerated deep reinforcement learning. In Pro-
ceedings of the Twenty-Fourth International Confer-
ence on Architectural Support for Programming Lan-
guages and Operating Systems, pages 499–513.
Choi, H.-B., Kim, J.-B., Han, Y.-H., Oh, S.-W., and Kim,
K. (2022). Marl-based cooperative multi-agv con-
trol in warehouse systems. IEEE Access, 10:100478–
100488.
Chu, T., Chinchali, S., and Katti, S. (2020). Multi-agent
reinforcement learning for networked system control.
arXiv preprint arXiv:2004.01339.
Ivan, M.-C. and Ivan, G. (2020). Methods of exercising
the surveillance of criminal prosecution. Rev. Stiinte
Juridice, page 160.
Jiang, J., Dun, C., Huang, T., and Lu, Z. (2018). Graph
convolutional reinforcement learning. arXiv preprint
arXiv:1810.09202.
Kaelbling, L. P., Littman, M. L., and Moore, A. W.
(1996). Reinforcement learning: A survey. CoRR,
cs.AI/9605103.
Kim, W., Park, J., and Sung, Y. (2021). Communication in
multi-agent reinforcement learning: Intention sharing.
In International Conference on Learning Representa-
tions.
Liang, E., Liaw, R., Nishihara, R., Moritz, P., Fox, R.,
Goldberg, K., Gonzalez, J., Jordan, M., and Stoica, I.
(2018). Rllib: Abstractions for distributed reinforce-
ment learning. In International Conference on Ma-
chine Learning, pages 3053–3062. PMLR.
Lillicrap, T. P., Hunt, J. J., Pritzel, A., Heess, N., Erez, T.,
Tassa, Y., Silver, D., and Wierstra, D. (2015). Contin-
uous control with deep reinforcement learning.
Lowe, R., Wu, Y. I., Tamar, A., Harb, J., Pieter Abbeel,
O., and Mordatch, I. (2017). Multi-agent actor-critic
for mixed cooperative-competitive environments. Ad-
vances in neural information processing systems, 30.
Meng, Y., Kuppannagari, S., Kannan, R., and Prasanna,
V. (2021). Ppoaccel: A high-throughput acceler-
ation framework for proximal policy optimization.
IEEE Transactions on Parallel and Distributed Sys-
tems, 33(9):2066–2078.
Meng, Y., Yang, Y., Kuppannagari, S., Kannan, R., and
Prasanna, V. (2020). How to efficiently train your ai
agent? characterizing and evaluating deep reinforce-
ment learning on heterogeneous platforms. In 2020
IEEE High Performance Extreme Computing Confer-
ence (HPEC), pages 1–7. IEEE.
Mnih, V., Badia, A. P., Mirza, M., Graves, A., Lillicrap, T.,
Harley, T., Silver, D., and Kavukcuoglu, K. (2016).
Asynchronous methods for deep reinforcement learn-
ing. In International conference on machine learning,
pages 1928–1937. PMLR.
Rocki, K. and Suda, R. (2011). Parallel monte carlo tree
search on gpu. In Eleventh Scandinavian Conference
on Artificial Intelligence, pages 80–89. IOS Press.
Shapley, L. S. (1953). Stochastic games. Proceedings of the
national academy of sciences, 39(10):1095–1100.
Wang, X., Zhang, Z., and Zhang, W. (2022). Model-based
multi-agent reinforcement learning: Recent progress
and prospects. arXiv preprint arXiv:2203.10603.
Wang, Y., Zhong, F., Xu, J., and Wang, Y. (2021).
Tom2c: Target-oriented multi-agent communication
and cooperation with theory of mind. arXiv preprint
arXiv:2111.09189.
Zhang, C., Kuppannagari, S. R., and Prasanna, V. K. (2021).
Parallel actors and learners: A framework for gen-
erating scalable rl implementations. In 2021 IEEE
28th International Conference on High Performance
Computing, Data, and Analytics (HiPC), pages 1–10.
IEEE.
Zhang, C., Meng, Y., and Prasanna, V. (2023). A framework
for mapping drl algorithms with prioritized replay
buffer onto heterogeneous platforms. IEEE Transac-
tions on Parallel and Distributed Systems.
DATA 2023 - 12th International Conference on Data Science, Technology and Applications
334
