
Interaction-Based Task Group Scheduling for a Scalable and Real-Time
Self-Driving Simulation
Akihito Kohiga
1
, Kei Hiroi
2
, Takumi Kataoka
1
, Sho Fukaya
3
and Yoichi Shinoda
1
1
Information Science Japan Advanced Institute of Science and Technology, Ishikawa, Japan
2
Disaster Prevention Research Institute Kyoto University, Kyoto, Japan
3
Applied Information Engineering Suwa University of Science, Nagano, Japan
shinoda@jaist.ac.jp
Keywords:
Virtual Machine, Vehicular Simulation, Real-Time Scheduling.
Abstract:
We developed a self-driving test environment based on Virtual Machine (VM) technology. Our test envi-
ronment enables us to test multiple types of self-driving Artificial Intelligences (AIs) in one simulation and
import their self-driving software to an actual car without modification. Our test environment divides a map
into several segments and assigns a physical machine to each segment. If a vehicle crosses a border, the VM
that embodies the vehicle is moved to another physical machine. However, VM movement causes a load
imbalance on the physical machines. We suggest a novel approach to assign high-priority processing to a
group of vehicles. The group of vehicles consists of one target vehicle that we would like to test and other
vehicles that may interact with the target vehicle. We create such a group by identifying interactions using a ”
pre-simulation”. Our approach reduced the processing time of the jobs created by the self-driving AIs by more
than 90 percent under an ideal condition . This result indicates that our approach contributes the real-time
processing when the CPU was in an overcommitted state.
1 INTRODUCTION
Many serious accidents occur during trials of self-
driving systems. The website (Sel, 2023) lists serious
incidents during self-driving. AI takes a long time to
learn the appropriate behavior with many scenarios.
To prevent an actual driver in a self-driving vehicle
from having a serious accident, many precise com-
puter simulations should be performed before a field
trial. A computer simulation can create many scenar-
ios that are too difficult and dangerous to run in real-
ity; thus, it reduces serious accidents before trials on
public roads.
Many self-driving vehicle simulators exist, such
as CARLA (Dosovitskiy et al., 2017), Udacity Self-
Driving Car Simulation (uda, 2017), and Microsoft’s
AirSim (air, 2017). These self-driving vehicle sim-
ulators have several problems related to ”flexibility.”
CARLA, Udacity Self-Driving Car Simulation, and
AirSim were developed as monolithic applications;
hence, essentially, they cannot be modified as paral-
lel applications on a cloud computer. Consequently,
they lack scalability. They have ”fixed” APIs to ac-
cess data inside the applications. When we require
additional data that their APIs do not provide, we can-
not acquire such data. if we requested additional APIs
to the developers, it would take a long time to imple-
ment.
It would be ideal if we could run many scenarios
with many types of simulated cars and export self-
driving AI from a simulation environment to a real ve-
hicle without any modifications. To accomplish these
requirements, the self-driving simulator would clearly
not be as described in previous studies. Self-driving
simulators require more flexibility to achieve scalabil-
ity and improve their ability to access data.
Our objective is to develop a flexible and scalable
test environment for self-driving AI. Figure 1 shows
an overview of the suggested environment. Our simu-
lation environment consists of VMs, a driving simula-
tor, a 3D map simulator, and simulation middleware.
In the figure, a driving simulator and 3D map sim-
ulator are connected to virtual devices in a VM via
simulation middleware and share information. The
3D simulator creates a virtual space and continuously
sends pictures as a camera view to a virtual camera
device on a VM. The driving simulator receives the
rotation angle from the steering wheel and the ac-
Kohiga, A., Hiroi, K., Kataoka, T., Fukaya, S. and Shinoda, Y.
Interaction-Based Task Group Scheduling for a Scalable and Real-Time Self-Driving Simulation.
DOI: 10.5220/0012083800003546
In Proceedings of the 13th International Conference on Simulation and Modeling Methodologies, Technologies and Applications (SIMULTECH 2023), pages 287-294
ISBN: 978-989-758-668-2; ISSN: 2184-2841
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
287
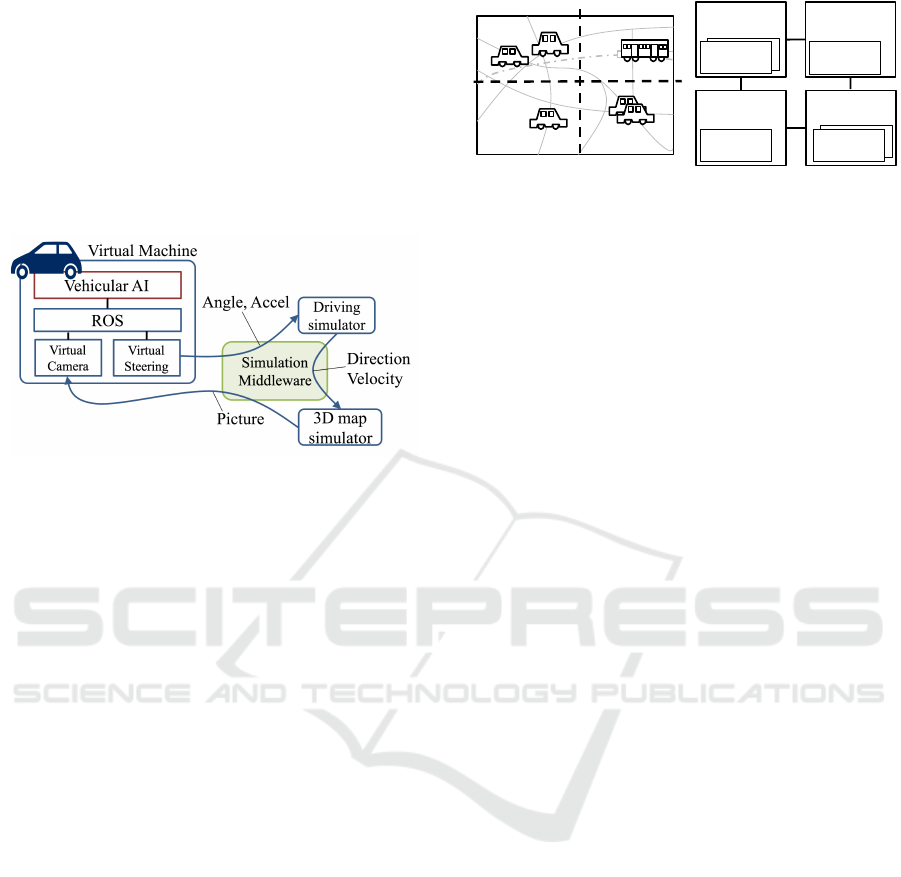
celeration value from a virtual steering wheel (and
virtual acceleration pedal and brake) in a VM. The
driving simulator calculates its direction and veloc-
ity from the rotation angle and acceleration value re-
ceived, and sends them to the 3D map simulator to up-
date the vehicle’s location. Developers of self-driving
AI can execute any task they develop in a VM, their
own AI, and any libraries and runtimes. In Figure 1,
ROS (Quigley et al., 2009) is used at the runtime en-
vironment in a VM.
Figure 1: VM-based simulation environment.
The data transaction in the suggested type of self-
driving simulation has ”geographical locality”. The
geographical locality of a data transaction means that
the data transaction often occurs between objects that
are geographically close to each other in a simulation.
In the case of a traffic simulation that has two self-
driving vehicles that are about to encounter each other
at a blind corner, they would perform a data transac-
tion via a wireless ad hoc network to avoid a traffic
accident. At the point of computation, VMs that are
geographically close to each other in the simulation
should be placed on a same physical machine to elim-
inate the data transaction over a physical network in a
data center, otherwise network congestion would oc-
cur.
Figure 2 shows the VM deployment mechanism in
our environment(Kohiga and Shinoda, 2020). The left
side of the figure describes a traffic simulation, and
the right side describes a simulation cloud. In this
example, the simulation map is separated into sev-
eral segments and, at least one physical machine is
assigned to each segment of the map. A VM repre-
sents a self-driving vehicle.
For example, in Figure 2, there are two vehicles in
Area #1 and the Physical Machine 1(PM1) is assigned
to Area#1. Two VMs are executed on PM1. If a self-
driving vehicle moves over the boundary of the two
areas, the VM representing this self-driving vehicle
moves to another physical machine. In the case of
Figure 2, when a self-driving vehicle in Area#1 moves
to Area#2, the VM that represents its vehicle on PM1
also moves to PM2.
VM
(vehicle #1)
Area#1 Area#2
Area#3
Area#4
map
PM3
(Area #3)
PM1
(Area #1)
VM
(vehicle #1)
PM4
(Area #4)
PM2
(Area#2)
VM
(train #1)
VM
(vehicle #3)
VM
(vehicle #1)
VM
(vehicle #4)
(“PM” stands for “Physical Machine”)
Figure 2: Division of the simulation map into several areas
and assignment of them to each physical machine.
Our simulation environment has more scalability
and flexibility, compared with the previous works.
2 CHALLENGES
The biggest problem in our simulation environment is
how to maintain real-time processing when there are
several spontaneous increases of VMs in one segment
described in Figure 2.
The simulation clock synchronization of all simu-
lation objects is the most important task in a loosely
coupled simulation environment. All simulation ob-
jects must maintain a simulation clock that is syn-
chronized with the others, otherwise the simulation
would lose credibility. In the case of a traffic simu-
lation, a car crash that should occur does not occur
because of the clock skew. Several techniques exist
for the synchronization of the clock in an agent-based
simulation. The most obvious technique is to have
“global virtual time” (GVT) (Fujimoto, 2001). GVT
is a clock system that is shared by all processing ob-
jects that appear in a simulation. Once GVT is set, all
processes should obey this time.
There is a case in which the lack of CPUs spon-
taneously occurs during a simulation in our environ-
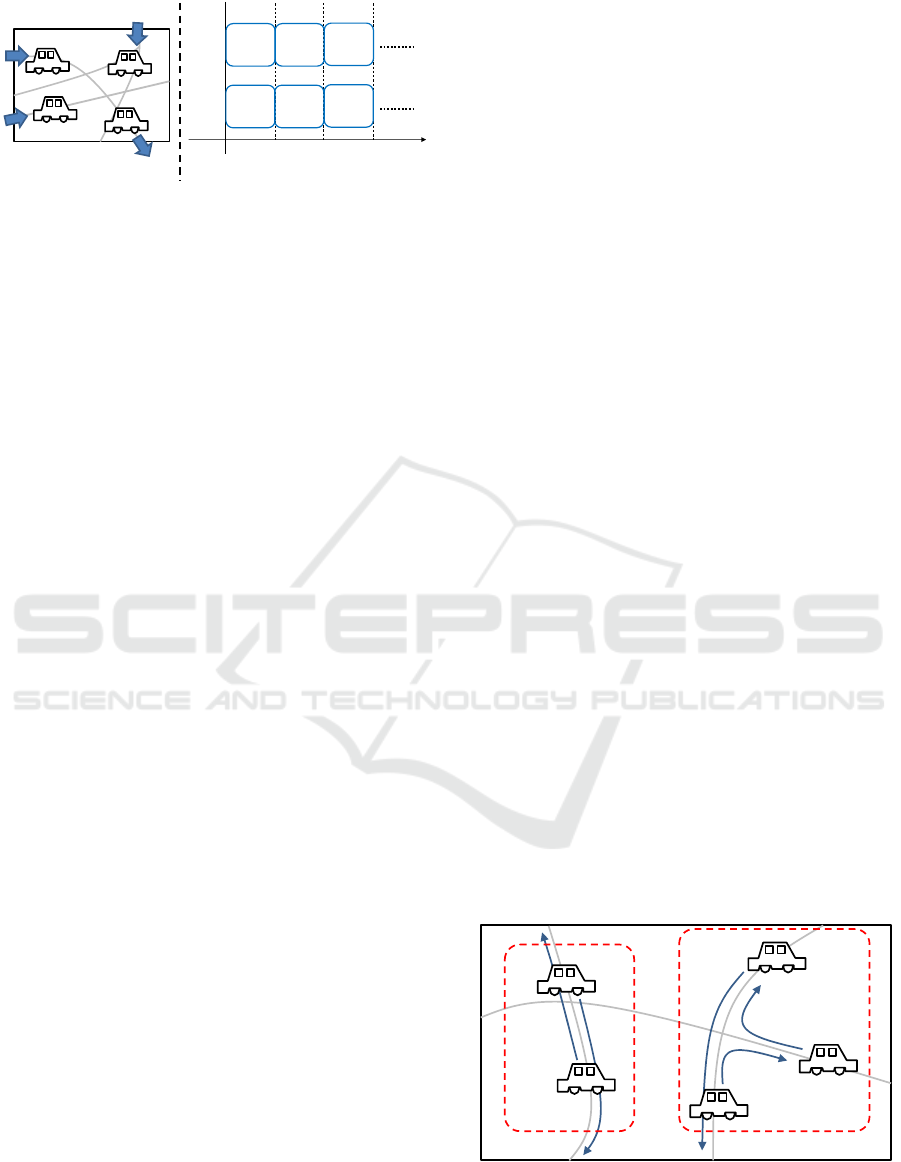
ment. Figure 3 shows a typical case in which a part
of the simulation in a VM is delayed. The left side
of the figure describes a simulation map and vehicles.
The right side of the figure describes task scheduling
with a timeline. We explained the deployment mech-
anism of our simulation environment in Figure 2. As
the simulation proceeds, the number of vehicles in an
area varies. At a certain moment, a number of vehi-
cles exceeds a number of CPUs assigned in the seg-
ment. There are four vehicles on the left-hand side
of the figure; hence, four VMs should be executed on
the physical machine assigned to this segment. This
physical machine has only two CPUs; hence, the ex-
ecution of these VMs are delayed because of the lack
of a CPU. In this case, the time lapse is twice as fast
as that for the clock inside the VMs (when the real
clock is T = 2, the VMs execute task A and task B at
SIMULTECH 2023 - 13th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
288
A
B
C
D
Area
CPU
#0
CPU
#1
A
(t=0)
Time
T=0 T=1
T=2
B
(t=0)
C
(t=0)
D
(t=0)
A
(t=1)
B
(t=1)
Figure 3: A influx of vehicles in one segment induces the
lack of CPUs in our simulation environment.
t = 1).
The simulation delay in one segment propagates
to all VMs in our simulation environment if they have
a time synchronization mechanism like GVT. Conse-
quently, the end of a simulation gets behind because
of spontaneous increase of VMs on only one segment.
Therefore, we would like to suggest how to maintain
real-time processing when there are several sponta-
neous increases of VMs in a segment.
3 RELATED WORKS
High Level Architecture(HLA)(Dahmann, 1997) is
the most famous middleware that federates indepen-
dent simulators in one simulation. Compared with our
simulation environment, HLA processes a federated
simulation with smaller time, but forces each sim-
ulator to embed APIs to access the HLA functions.
We are considering how to utilize the functionality
of HLA (ex. time synchronization, data exchange) in
virtual machine mechanism and it would be good step
for next federation.
Many studies also have been conducted that are re-
lated to task scheduling for cloud computing, which is
essentially used to reduce the turn around time (TAT)
of a request from outside a data center. Its tech-
nique is based on how many requests are assigned
to each computer with a certain criterion (request
priority, energy aware, high CPU utilization, etc.).
Task scheduling-related studies were categorized by
Mathew et al. (Mathew et al., 2014). The unique
feature of our simulation environment is the sponta-
neous movement of VMs. According to the explana-
tion in Figure 2, if a self-driving vehicle moves over
the boundary of the area, the VM that represents the
self-driving vehicle also moves to another physical
machine. This deployment mechanism uses the “geo-
graphical locality” of the data transaction between the
VMs and simulators, but the spontaneous movement
of VMs occurs. A load balancing mechanism cannot
control such spontaneous movement. This feature oc-
curs a load imbalancing and has not been studied in
previous work in this field.
4 INTERACTION-BASED TASK
GROUP SCHEDULING
4.1 Basic Concept
A feasible solution is to choose a minimum set of
VMs to which high priority is assigned to avoid the
lack of resources. We define a minimum set of VMs
as the VMs that consists of one target VM and the
others which interact with the target VM. A developer
who is creating a self-driving AI running on the target
VM must test whether the self-driving AI smoothly
negotiates with other self-driving AIs when they en-
counter each other in a critical scenario (e.g., negotia-
tion at a blind corner). In such tests, if we choose a set
of VMs that interact with the target self-driving AI,
we can ignore synchronization with the other VMs.
Figure 4 shows the image of vehicles grouped in
a simulation. There are five vehicles (VehicleA to
VehicleE) in the figure and they have a direction to
move in (depicted by an arrow). VehicleA is mov-
ing down a road and VehicleB is moving up the same
road. Finally, they pass each other somewhere on this
road. If they have cameras for object recognition,
then these cameras must capture the opposite vehi-
cle (the camera on VehicleA captures VehicleB, and
vice versa). Similar to VehicleA and VehicleB, Vehi-
cleC, VehicleD, and VehicleE pass each other on the
right-hand side of the area; hence, they are captured
by each other’s cameras. We refer to VehicleA and
VehicleB as “GroupA” and VehicleC, VehicleD, and
VehicleE as “GroupB.” In the figure, vehicles that be-
long to GroupA have never encountered the vehicles
that belong to GroupB; therefore, we can set differ-
ent priorities for each group. If we have to observe
the behavior of VehicleA, we can set a high priority
for vehicles that belong to GroupA. By contrast, we
must ignore the behavior of vehicles that belong to
GroupB.
A
B
C
D
E
GroupA GroupB
Figure 4: Basic concept is to compose the vehicles which
interact with each other in a group and observe one group’s
behavior.
Interaction-Based Task Group Scheduling for a Scalable and Real-Time Self-Driving Simulation
289
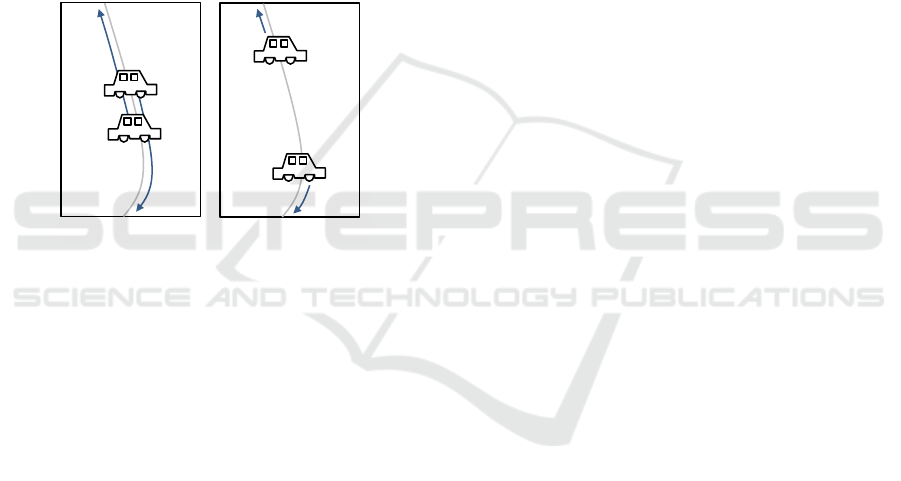
Figure 5 indicates the relationship between the
elapsed time and the vehicle’s position. The rectangle
on the left-hand side indicates the positions of two ve-
hicles for a certain time (t = 0) and the rectangle on
the right-hand side indicates the positions of two ve-
hicles for another time (t = 1). The two vehicles are
about to interact somewhere on a road at t = 0 and
then they move in their own directions at t = 1. Un-
til the two vehicles pass each other, they belong to
the same group and we must assign the same priority
to them. However, after they have interacted and are
moving in different directions, they are independent
from each other and we no longer assign the same
priority to them. To acquire the relation between the
elapsed time and the vehicle’s position, we must pre-
dict the interactions before we run a self-driving sim-
ulation.
A
B
A
B
Interact (t=0) Not Interact (t=1)
Figure 5: Two vehicles are not in one group after they pass
each other.
”Interaction” refers to a scenario in which a vehi-
cle is visible to another vehicle’s sensor. Many types
of sensors exist and common feature of these sensors
is that they have an ”effective range”. For example,
a camera has a range of dozens of meters that shapes
sector in front and LiDAR has a range of several me-
ters that shapes circular. If a vehicle moves into the
range of the sensor, self-driving AI recognizes it as
an object and then makes some decisions Therefore,
we define interaction as a scenario in which a vehicle
moves into the effective range of a sensor and inter-
acts with a self-driving AI’s decision. Our simulation
environment must obtain the effective range of sen-
sors to create the aforementioned groups.
4.2 Overview of Our Approach
4.2.1 Requirement
We mentioned that our suggested mechanism requires
a starting point and route information from each VM
before the simulation starts. This is a precondition
for interaction-based priority settings. In this paper,
we do not discuss which interface is appropriate be-
cause it is simply an implementation matter and out
of scope for our study. We only have to acquire start-
ing points and route information from each VM using
some type of method. To acquire the starting points
and route information from each VM requires, at a
minimum, more than one interface between the VMs
and simulation management middleware.
4.2.2 Control Flow
The basic concept of our solution is to change the in-
teraction information in a simulation to the priority
settings on each VM. We divide this basic concept
into the following four parts.
1. (Traffic Simulation) acquires the current location
and route information from each VM, executes a
traffic simulation with them, and acquires the re-
sult file, which records the position of each ve-
hicle and the direction sorted by time. We could
regard this sequence as a ”pre-simulation”.
2. (Interaction Search) searches interactions from
the result file created in the previous step. Inter-
action search creates a time series interaction list,
which consists of a set of clocks , the two vehi-
cles’ IDs, and an interaction symbol (unilateral or
mutual).
3. (Grouping) creates priority information for each
VM from the interaction information. Grouping
sequence creates a group of vehicles. The group
consists of ”a target vehicle” and the other vehi-
cles that interact with the target vehicle. In this
sequence, we must select one vehicle as the target
vehicle.
4. (Priority Control) sends priority settings to every
virtual clock in accordance with the high-priority
group information.
The above four parts are shown in Figure 6. These
sequences are processed on the simulation middle-
ware. The grouping sequence creates files that include
priority information for each VM, which is the list of
priority settings for every clock from the simulation
start time. Priority Control sends a priority setting to
every clock that corresponds to the same clock in the
priority file.
In contrast to the periodic process for Priority
Control, the Traffic Simulation in the simulation mid-
dleware gathers starting points and route information
from each VM once before the simulation starts. If
some VMs change their route, the simulation middle-
ware must execute Interaction Search and Grouping
again because the route change affects the interaction
information between vehicles.
SIMULTECH 2023 - 13th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
290

Figure 6: Priority Control flow in our simulation environ-
ment.
4.3 Interaction Search
Interaction Search searches the interactions in the
simulation. As we mentioned, we must choose one
vehicle as the target vehicle and then search the ve-
hicles that interact with the target vehicle. Finally,
Interaction Search generates the time series interac-
tion list, which consists of a set of clocks, the two
vehicles’ IDs, and their distance between them. For
an effectiveness experiment in this study, we use the
SUMO (Krajzewicz et al., 2002) traffic simulator to
obtain the starting points and route information in-
stead of acquiring them from each vehicle. SUMO
has a program that randomly generates any number of
vehicles in a simulation, including the starting points
and route information. We also use SUMO as the traf-
fic simulation for the Traffic Simulation on the simu-
lation middleware. We assume that the current posi-
tion and route information can be acquired from each
VM. Route information can also be acquired from
each VM. The self-driving AI must set the destina-
tion and route information before departure; hence,
this information must exist whenever we run the “pre-
simulation”.
4.4 Grouping
Grouping creates priority information for each VM
from interaction information. Our mechanism creates
a group of vehicles that consists of ”a target vehicle”
and other vehicles that interact with the target vehicle.
As we mentioned in the definition of interaction in
Figure 5, two vehicles interact somewhere on a road
at t = 0 and then move in their own directions at t = 1.
These two vehicles are included in one group at t = 0,
but they are not in the same group at t = 1. Therefore,
the number of vehicles in the group is greatest at the
start time of the simulation and then decreases as time
progresses.
Figure 7 shows a time sequence that describes the
Grouping process. Each circle with a capital letter
represents one vehicle and the horizontal axis (from
T = 0 to T = 5) indicates the elapsed time. An arrow
in this figure represents a vehicle moving to another
place; hence, VehicleA at T = 0 has a different posi-
tion from VehicleA at T = 1. A red oval represents
an interaction and has two meanings : unilateral in-
teraction and mutual interaction. For example, Vehi-
cleC and VehicleD have two interactions at T = 1 and
T = 5, and VehicleA, VehicleB, and VehicleC have
one interaction at T = 3. A short dashed line sur-
rounds almost half of the figure, which indicates the
group that we finally want to create. The figure de-
scribes the group of VehicleA. The group of VehicleA
means ”VehicleA as a target vehicle and the other ve-
hicles that interact with VehicleA”.
A
B
C
D
E
A
B
C
D
E
A
B
C
D
E
A
B
C
D
E
A
B
C
D
E
A
B
C
D
E
T=0
T=1
T=2
T=3
T=4
T=5
Figure 7: Grouping.
Data 1: Group Data (result of Grouping).
[(’VehicleID’, clock), ...]
[(’91.0’,19.0),(’87.0’,15.0),(’99.0’,12.0),
(’15.0’,12.0),(’57.0’,11.0),(’43.0’,7.0)]
Finally, we acquire the group data described in
Data 1. A tuple consists of the vehicle ID and clock.
Clock in this data means the last clock when the high-
priority setting of its vehicle is canceled. In the case
of vehicle ID ”A” and clock ”10.0,” our simulation
middleware assigns a high priority to vehicle A” from
the starting time (normally 0.0) to ”10.0” in the simu-
lation.
5 EVALUATION
Figure 8 shows the basic sequence of the evaluation
environment. The basic sequence is composed of the
map and route information of every vehicle as in-
put, simulation middleware, the VM deployment al-
gorithm, and a cloud simulator. The simulation mid-
Interaction-Based Task Group Scheduling for a Scalable and Real-Time Self-Driving Simulation
291

dleware is also composed of a traffic simulator and
other parts. We prepared the SUMO traffic simulator
to generate the vehicle’s position and also prepared
the following three components: interaction search,
grouping, and priority setting . The simulation mid-
dleware created the priority setting of each vehicle
and input them into the cloud simulator. We used a
cloud simulator instead of an actual cloud to process
the job.
dƌĂĨĨŝĐƐŝŵƵůĂƚŽƌ
;^hDKͿ
• /ŶƚĞƌĂĐƚŝŽŶƐĞĂƌĐŚ
• 'ƌŽƵƉŝŶŐ
• WƌŝŽƌŝƚLJƐĞƚƚŝŶŐ
ůŽƵĚƐŝŵƵůĂƚŽƌ
;KDEdннͿ
DĂƉ
ZŽƵƚĞ
/ŶĨŽƌŵĂƚŝŽŶ
sĞŚŝĐůĞ͛ƐƉŽƐŝƚŝŽŶ
ΘĚŝƌĞĐƚŝŽŶŽŶ
ĞǀĞƌLJ ĐůŽĐŬ
WƌŝŽƌŝƚLJƐĞƚƚŝŶŐ
sDůŽĐĂƚŝŽŶŽŶ
ĞǀĞƌLJ ĐůŽĐŬ
sD ĚĞƉůŽLJ
ĂůŐŽƌŝƚŚŵ
sĞŚŝĐůĞ͛Ɛ
ƉŽƐŝƚŝŽŶŽŶ
ĞǀĞƌLJĐůŽĐŬ
^ŝŵƵůĂƚŝŽŶ
ŵŝĚĚůĞǁĂƌĞ
KƵƚƉƵƚ
;ƉƌŽĐĞƐƐŝŶŐƚŝŵĞ
ŽĨĞĂĐŚũŽďͿ
Figure 8: Basic sequence of the evaluation.
Table 1 shows the configuration that we used for
the traffic simulation on the simulation middleware.
The SUMO traffic simulator requires a map, a starting
point and route information for each vehicle as input.
We created a grid-shaped load map and the vehicle’s
information using scripts that are part of the SUMO
simulator. Vehicles were generated in the range from
100 to a maximum of 500 vehicles at the beginning
of the simulation. We prepared two methods to create
a vehicle’s route: one based on a random walk and
another that compel the vehicles to move through a
designated place. The lesser the interaction the better
for reducing the number of vehicles that are assigned
high priority. A random walk is an ideal method to
reduce interactions. In contrast to a random walk, a
traffic jam is the worst scenario at the point of reduc-
ing interactions.
Table 1: Traffic simulation parameters.
map 2km square 400 junctions
number of vehicles 100 to 500
simulation time(s) 200 to 1000
route of each vehicles Random
We describe the details of the cloud simulator in
Figure 9. The cloud simulator is based on a queuing
system. A physical machine is composed of one CPU,
one sink, two queues, and one selector. The number
of physical machines also changes in accordance with
how many physical machines are used for the simula-
tion.
A
High Priority
Low Priority
Selector
CPU
Sink
B
C
D
E
GroupB
GroupA
Simulation Middleware
set priority
input jobs
Figure 9: Cloud simulator (OMNET++).
A vehicle receives priority information and VM
location. Priority information is a set of time and pri-
ority. When a vehicle receives a set of time and prior-
ity such as (4.0, high), the source changes the job’s
priority to high immediately and the high-priority
state is finished by the 4.0 clock. A vehicle send a
job to a high priority queue during high-priority state.
The source also receives VM location information
When a vehicle receives the new location, the vehi-
cle sends the next job to another physical machine.
5.1 Evaluation Points
We consider the following points for the evaluation
of our approach. The objective of our approach is to
create a minimum group of vehicles and assign high
priority to them to maintain real-time processing. The
smaller number of vehicles in one group is the better.
These points are the basic evaluation to observe the
feature of our mechanism.
1. measure the processing time of jobs with a fixed
number of vehicles and fixed duration as a fun-
damental evaluation, and then compare the two
cases: our approach assigns high priority to the
minimum group of vehicles and a normal scenario
in a priority property is not assigned;
2. measure the processing time using our approach
in the case in which the simulation time is in-
creased;
3. investigate differences in the number of interac-
tions between vehicles running with a random
walk and vehicles that stay in a traffic jam
5.2 Result
5.2.1 Fundamental Evaluation
Figure 10 shows the fundamental evaluation result of
our approach. We also describe the configuration of
SIMULTECH 2023 - 13th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
292

0
100
200
300
400
500
600
0.0 33.0 20.0 11.0 85.0 55.0 75.0 77.0 88.0 23.0 50.0 7.0 30.0 67.0
processing time (ms)
Vehicle IDs
without priority
our approach
Figure 10: Fundamental evaluation of our approach.
this evaluation in Table 2.
Figure 10 shows that our approach effectively re-
duced the processing time compared with the process-
ing time without our approach. The x-axis represents
the individual vehicle IDs and the y-axis represents
the average processing time of jobs produced by each
vehicle. The best case is vehicle ID ”30.0”. The pro-
cessing time with our approach was 3.03 milliseconds
and the processing time without our approach was
507.53 milliseconds, which means that our approach
reduced the processing time by approximately 99.3
percent. The worst case was the vehicle ID ”55.0” In
this case, our approach reduced the processing time
by approximately 98 percent of the processing time
without our approach. The average processing time
with our approach was 4.703 milliseconds and that
without our approach was 432.808. Therefore, our
approach reduced the processing time by 99 percent.
Table 2: Configuration of the fundamental evaluation.
Traffic simulation configuration
map 2km
2
400 junctions
number of vehicles 200
simulation time(s) 200
routes Random
physical macine configuration
the number of PCs 9 nodes (4cores)
The jobs produced by vehicles took 2 milliseconds
to be processed. Therefore, if they were smoothly
processed without waiting on a queue, the ideal re-
sult of the above evaluation would be 2 milliseconds.
The average processing time with our approach was
4.703 milliseconds. This means that some jobs were
slightly stacked on a physical machine. Later, we dis-
cuss whether this delay is reasonable for the real-time
processing of a self-driving simulation.
5.2.2 Increasing the Duration of a Simulation
Figure 11 shows the relationship between the dura-
tion of a simulation and the processing time. The
configuration of this evaluation is the same as that of
the fundamental evaluation. This result indicates that
our approach could not maintain real-time processing
in a simulation that had a long duration. Consider-
ing the 400-second duration in the graph, the average
processing time was approximately 50 milliseconds.
Generally, a delay is barely noticeable up to 50 mil-
liseconds and is acceptable up to 100 milliseconds if
no high demands with respect to realism are required.
Therefore, the duration of a simulation should be less
than 600 seconds for this configuration.
0
50
100
150
200
250
300
350
400
450
200 300 400 500 600 700 800 900 1000
average of processing time (ms)
Duration of a simulation (s)
"result.csv" using 1:2
Figure 11: Influence on increasing the duration of the sim-
ulation.
5.2.3 Random Walk vs Traffic Jam
Figure 12 shows a comparison of a number of interac-
tions between vehicles using a random walk and in a
traffic jam. We prepared three cases that had different
numbers of vehicles and compared the average num-
ber of interactions in the case of a random walk and
traffic jam. The other configuration (duration, map,
etc.) was the same as that used in the fundamental
evaluation. The number of interactions in the case of
a random walk was almost the same as the evaluation
result described in Figure 10. By contrast, the num-
ber of interactions in the case of a traffic jam increased
drastically. This result indicates that almost all vehi-
cles interact with each other when they are involved
in a traffic jam; hence, the traffic pattern should be
created carefully so as not to induce a traffic jam to
maintain the stability of the processing time.
Interaction-Based Task Group Scheduling for a Scalable and Real-Time Self-Driving Simulation
293

0
100
200
300
400
500
100 300 500
the number of interactions at beginning
the number of vehicles
randomwalk
traffic jam
Figure 12: Difference between the number of interactions
for a random walk and traffic jam.
6 CONCLUSION
We summarize several characteristics of our approach
from the evaluation results as the following items:
• In the ideal circumstance for a self-driving simu-
lation, our approach reduced the processing time
to approximately 99 percent.
• The duration of a simulation should be less than
600 seconds in the configuration of Table 2.
• We should not use our algorithm in a traffic jam.
The acceptable number of vehicles in a simulation
depended on the map size. We used a map size of
2km × 2km. If the map was larger, it would be ac-
ceptable to execute more vehicles; that is, the num-
ber of interactions depended on the balance of the
number of vehicles, duration, and map size. More-
over, the acceptable number of interactions depended
on the number of CPUs in a segment. We suggested
a type of ”criterion” in our evaluation when our ap-
proach was used in a self-driving simulation to enable
it to work appropriately to maintain real-time process-
ing. We will continue to test our approach with the
other conditions
7 FUTURE WORK
An experiment on our actual self-driving simulation
cloud is obvious as a future work. There is another
major work that is to merge this priority assign ap-
proach with ”our VM deploy mechanism”. The load
balancing in our VM deploy mechanism (Kohiga and
Shinoda, 2020) is a heavy task because it utilizes VM
migration. We are thinking of an algorithm that re-
duces the number of VM migration by replacing with
this priority assign approach.
ACKNOWLEDGEMENTS
We thank Edanz (https://jp.edanz.com/ac) for editing
a draft of this manuscript.
REFERENCES
(2017). AirSim. https://microsoft.github.io/AirSim/.
(2017). Udacity’s Self-Driving Car Simulator. https://git
hub.com/udacity/self-driving-car-sim.
(2023). Incidents of Self-driving Car. https://en.wikipedia.
org/wiki/Self-driving car#Incidents.
Dahmann, J. (1997). High level architecture for simula-
tion. In Proceedings First International Workshop on
Distributed Interactive Simulation and Real Time Ap-
plications, pages 9–14.
Dosovitskiy, A., Ros, G., Codevilla, F., Lopez, A., and
Koltun, V. (2017). CARLA: An Open Urban Driving
Simulator. In Proceedings of the 1st Annual Confer-
ence on Robot Learning, pages 1–16.
Fujimoto, R. M. (2001). Parallel simulation: Parallel and
distributed simulation systems. In Proceedings of the
33nd Conference on Winter Simulation, WSC ’01,
pages 147–157, USA. IEEE Computer Society.
Kohiga, A. and Shinoda, Y. (2020). Deploy mechanism
for virtual-machine based vehicular ad hoc network
simulation. In 2020 Spring Simulation Conference
(SpringSim), pages 1–12.
Krajzewicz, D., Hertkorn, G., R
¨
ossel, C., and Wagner, P.
(2002). Sumo (simulation of urban mobility) - an
open-source traffic simulation. In 4th Middle East
Symposium on Simulation and Modelling, pages 183–
187.
Mathew, T., Sekaran, K. C., and Jose, J. (2014). Study
and analysis of various task scheduling algorithms in
the cloud computing environment. Proceedings of the
2014 International Conference on Advances in Com-
puting, Communications and Informatics, ICACCI
2014, pages 658–664.
Quigley, M., Conley, K., Gerkey, B. P., Faust, J., Foote, T.,
Leibs, J., Wheeler, R., and Ng., A. Y. (2009). ROS:
an open-source Robot Operating System. In ICRA
Workshop on Open Source Software, number Figure
1, pages 679–686.
APPENDIX
The source code of our approach.
https://github.com/akiihito/PriorityControl
SIMULTECH 2023 - 13th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
294
