
Analytical Model of Communication Algorithm for Simulations with
Range-Limited Interactions
Theresa Werner
1
, Christof P
¨
aßler
2
, Ivo Kabadshow
2
and Matthias Werner
1
1
Department of Operating Systems, University of Technology Chemnitz, Germany
2
J
¨
ulich Supercomputing Centre, Germany
Keywords:
Communication Algorithms, Time Analysis, Tradeoff Analysis, Range-Limited Interactions, Particle Simula-
tion.
Abstract:
With the development towards strong-scaling in High Performance Computing (HPC), many HPC applications
become communication-bound. One of them is the HPC Molecular Dynamics Simulation library FMSolvr,
which we are currently revising. In order to optimize communication, one could improve or develop new
communication protocols, but in this work we are focusing on problem-specific communication algorithms.
We found two promising candidates, the so-called Shift and what we call the Team Shift algorithm. In this
work we present an analytical model for the Shift algorithm and verify it. Our model is based on the Hockney
communication model and therefore only needs the two Hockney parameters α and β as input, so it can be
used on any network where the Hockney model is applicable.
1 INTRODUCTION
With the trend in High Performance Comput-
ing (HPC) towards strong-scaling, HPC programs
“find their overall performance limited more by
performance of the communication network than
by the arithmetic performance of the nodes them-
selves (Hockney, 1994)”, i.e. HPC again became
communication-bound for many algorithms. Opti-
mizing communication hence has become a topic of
interest again. One way of optimizing is to work
on new communication protocols such as LCI (Dang
and Snir, 2018) or GASNet (Bonachea and Hargrove,
2018). Another way is to explore problem-specific
communication algorithms with less overhead. This
work focuses on the second approach.
We are interested in communication algorithms
that are suitable for Molecular Dynamics Simula-
tions (MDS). By conducting a Systematic Literature
Review on communication algorithms (Werner et al.,
2022) that might be suitable for our MDS library FM-
Solvr, we found two algorithms which are of inter-
est to us and may be of interest to scientists in other
fields of HPC, too. The two algorithms are Shift com-
munication as proposed by (Plimpton, 1995) and the
algorithm developed by (Driscoll et al., 2013) that is
based on the Shift and will be referred to as Team Shift
because it uses processor teams. Seeing that the two
algorithms seem to be suitable for covering different
ranges in the context of range-limited interactions –
Shift covering smaller areas than Team Shift – there
must be one or more tradeoff points where the Team
Shift starts to outperform the Shift.
In this work, we present an analytical model for
the first algorithm, the Shift. We start with the Shift
because it has higher relevance for FMSolvr due to
being optimal for covering small ranges. With an im-
plementation of the Shift algorithm, we can show that
the Shift model can predict the real timing behavior
of the implementation and hence can be used to find
the tradeoff points once we have a Team Shift model
as well. The only precondition for our model is deter-
mining the Hockney (Hockney and Jesshope, 1988)
model parameters α and β, which can be determined
by “ping pong” measurements.
Once we have a verified Team Shift model as well,
revised FMSolvr will be able to select its communi-
cation algorithm by only being given the Hockney pa-
rameters of the target system as input.
As for the structure of this work: Section 2 in-
troduces the reader to the two communication algo-
rithms; Section 3 walks the reader through the analyt-
ical model of the Shift; Section 4 gives insight into
our system properties and implementation specifics
and explains how to determine the Hockney param-
eters for a given system; Section 5 compares the Shift
Werner, T., PÃd’çler, C., Kabadshow, I. and Werner, M.
Analytical Model of Communication Algorithm for Simulations with Range-Limited Interactions.
DOI: 10.5220/0012085500003546
In Proceedings of the 13th International Conference on Simulation and Modeling Methodologies, Technologies and Applications (SIMULTECH 2023), pages 311-317
ISBN: 978-989-758-668-2; ISSN: 2184-2841
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
311

model predictions to the measurements of the imple-
mentation; and Section 6 summarizes this work, dis-
cusses certain details, and gives an outlook to future
work.
2 ALGORITHM DESCRIPTION
2.1 Problem Description
Before we look at the two algorithms, we should look
at the problem they were developed for. Without go-
ing too deep into the physics of MDS, the scenario
can be described as follows: we cut our simulation
space (our particle system) into same-sized cubes or
boxes in order to distribute the work over the compu-
tation nodes. Every compute node holds one of these
boxes
1
. Each box contains a subset of particles of the
particle system. This subset of particles interacts with
itself but also with particles of boxes that are handled
by other nodes. So, in order to simulate the move-
ment of its subset of particles properly, a node must
exchange data with all nodes that hold boxes which
are neighboring boxes of its own box, i.e. the data
from other nodes must be transferred over the net-
work. Figure 1 illustrates the problem for the dark
blue and the dark orange box in a two-dimensional
simulation space.
In a three-dimensional simulation, one node has
a total of (2k + 1)
3
− 1 exchange partners where k ∈
N stands for the layers of neighbors around the box,
aka. cut-off radius. Parameter k = 1 means the first
layer of neighbors, which share a face, an edge, or a
Figure 1: Neighbors of a box. Each node requires the data
of boxes that are neighbors to its own box. The neighbors of
the dark orange box are light orange; the neighbors of the
dark blue box are light blue. Boxes may share neighbors.
The size of the neighborhood is defined by k ∈ N.
1
In fact, a node may hold several boxes, but for sim-
plicity we shall consider the case of one box per node. An
algorithm for multiple boxes per node is described in (Liem
et al., 1991), which is an early version of the Shift.
(a) (b) (c)
Figure 2: Shift by (Plimpton, 1995). First, the data is dis-
tributed along the row. Then, the accumulated row data is
distributed along the column. Last, the accumulated data
of the plane is distributed within the tower (vertical dimen-
sion).
corner with the center box; k = 2 means the second
layer of neighbors, which share a face, an edge, or a
corner with the first-layer neighbors. For Figure 1 k is
two. So, how do we reduce the number of (2k +1)
3
−
1 point-to-point messages and make communication
more efficient?
2.2 Classic Shift Communication
The Shift communication algorithm uses proxy com-
munication to reduce the number of messages. What
is meant by proxy? Every node only communicates
with its six direct logical
2
neighbors Left, Right,
Front, Back, Up, and Down. If a node needs to ex-
change data with a node that is not one of the six direct
logical neighbors, its neighbors take care of daisy-
chaining the data to its destined receiver. In order to
allow this proxy behavior with only six neighbors and
still get the data to all relevant places the nodes must
follow a special communication pattern.
Figure 2 illustrates the three phases of the Shift:
first, a node sends its data to its Left and Right neigh-
bor and receives their data in return (see Fig. 2a). If
k > 1, the node will now send the data it received
from the Left neighbor to its Right neighbor and vice
versa. In return, it receives the data of its second next
neighbors to the right and left. This continues until
all nodes within one row have all the data of nodes
k positions up and down the row. Second, the row
data is pooled into one message and sent to the Front
and Back neighbor (see Fig. 2b). Equivalent to the
procedure in the row, the data packages are daisy-
chained along the column for k > 1. Third, the data
of the plane is combined into one message and sent
to the Up and Down neighbors along what we call the
towers (see Fig. 2c). That concludes the classic Shift
communication by (Plimpton, 1995).
2
A neighbor in this context does not mean a physical
neighbor, but a node that holds the neighboring box to the
node’s own box. In any figure, we assume the logical neigh-
bors to be physical neighbors.
SIMULTECH 2023 - 13th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
312

Figure 3: Team algorithm by (Driscoll et al., 2013). First,
the data is distributed within the team. Second, the data
is “tilted” among the teams. Third, the data is shifted in a
wrap-around fashion around the whole space. Last, the ac-
cumulated data of each team is gathered by the team leader.
(Graphic from (Driscoll et al., 2013).).
2.3 Team Shift Communication
The Team Shift communication algorithm was orig-
inally developed for an all-to-all exchange between
nodes instead of a local interaction set. The method
can, however, be adjusted to our application. But let
us look at the original algorithm first, which is dis-
played in Figure 3.
The algorithm uses three important parameters:
the total number of processors P, the number of mem-
bers in a team c (for copy), and the resulting num-
ber of teams T = P/c. The data (represented by tiny
circles in Fig. 3) is distributed evenly over the teams
without regard for order or spatial context. The team
leader broadcasts the data within its team (step
1
⃝).
Next, the data is “tilted” among the teams (step
2
⃝).
Then, every team member daisy-chains (step
3
⃝) the
received data from a dedicated sender, which is c
teams up the row, to a dedicated receiver, which is
c teams down the row. This is done until the data
has circled once all around the teams (wrap-around).
Last, the team leader gathers the data its team mem-
bers have accumulated, which is all the data of all
teams.
Step
2
⃝ has the effect that a team has data of c
different teams before it starts daisy-chaining data in
step
3
⃝ like in the Shift algorithm. This allows to
daisy-chain/shift in steps of c, i.e. to cover a much
bigger distance in one shift than is possible with the
Shift algorithm.
(Driscoll et al., 2013) extended this algorithm to
fit the problem of a local interaction set. This time
the data is distributed with regard to spatial context,
i.e. the simulation space is cut and distributed like for
the Shift. And they constrained the global algorithm
to wrap around the distance defined by m (their m is
our k), see Figure 4. The Team Shift with only one
team member is almost identical to the Shift. The only
exception is that data is daisy-chained only in one di-
Figure 4: Team Shift by (Driscoll et al., 2013). Instead
of wrapping around the whole space, the algorithm wraps
around the cut-off area defined by m (their m is our k).
(Graphic from (Driscoll et al., 2013).).
rection and wrapped around the cut-off k instead of
being daisy-chained in both directions.
While the all-to-all algorithm can simply line up
all boxes and wrap around this single dimension, the
range-limited algorithm must be performed thrice,
once into each dimension, because we now have spa-
tial context and not a random distribution of particle
data.
3 COMMUNICATION MODEL
3.1 Hockney Model
We are using what is commonly known as the Hock-
ney (Hockney and Jesshope, 1988, pp.85) model or
the “postal” model of communication
3
because de-
spite its simplicity it is able to make accurate pre-
dictions about message latency and focuses solely on
the communication and not on computation or other
aspects of the machine. The PRAM (Fortune and
Wyllie, 1978) model is not suitable for us since it
mainly focuses on shared memory machines, and the
BSP (Valiant, 1990) and LogP (Culler et al., 1993)
models only use an upper bound for latency instead
of calculating an accurate latency value; as the Shift
(and Team Shift) works with increasing message load
in different stages of the algorithm, an upper bound
for latency is not useful for us. Also, the o and g pa-
rameter of the LogP model are too sophisticated for
our purposes, and the effort of determining these pa-
rameters is disproportionate compared to the expected
gains.
In the Hockney model each message consists of
a constant part α, which represents the latency of an
empty message, and the variable part β · m where β
represents the inverse bandwidth (time per byte) and
3
The original model is slightly more complex, but the
reduced model we are using is commonly used and suffi-
cient for our purpose.
Analytical Model of Communication Algorithm for Simulations with Range-Limited Interactions
313

m the number of bytes in the message. Together this
makes a total message time of
T = α + β · m .
3.2 Shift Model
For the Shift each node must send k messages into
each direction, and each message takes the time
α + βm
d
, where m
d
is the message size depending on
the dimension/phase. Thus, for each dimension we
spend a total time of
t
d
= 2k · (α + β · m
d
) . (1)
The message size for the exchange within the row is
m
1
. The message content of the next dimension com-
prises of the k messages of the right neighbors, the
k messages of the left neighbors, and the node’s own
data, so 2k + 1 message contents of the previous di-
mension. Therefor, he message size for the column
dimension is
m
2
= (2k + 1) · m
1
and the message size for the tower dimension is
m
3
= (2k + 1) · m
2
= (4k
2
+ 4k + 1) · m
1
.
So, we get an overall communication time of
T
Shift
= 6k · α + 2k · β(m
1
+ m
2
+ m
3
)
= 6k · α + β · m
1
(8k
3
+ 12k
2
+ 6k) .
(2)
If, like in our case, a node cannot send and receive at
the same time (see Sec. 4.1), each exchange consists
of two consecutive sending processes instead of two
concurrent ones, so Equation 2 must be multiplied by
two. Hence, we get
T
Shift
= 12k · α + 2β · m
1
(8k
3
+ 12k
2
+ 6k) .
(3)
4 METHODS
4.1 Implementation Background
Our cluster JURECA has an InfiniBand network with
MPI (we used OpenMPI 4.1.2). MPI has two differ-
ent modes of sending, eager and rendezvous proto-
col. Eager protocol is for small messages (< 256kB
4
).
The send call returns immediately because the re-
ceiver is known to have enough buffer to receive the
message. For message sizes above that limit, MPI
uses the rendezvous protocol, which means that the
4
The limit is supposed to be much lower, but we mea-
sured it at 256kB.
Figure 5: Coordinating communication with MPI Ssend:
First, the blue ranks send their data and the orange ranks
receive, then the orange ranks send their data and the blue
ranks receive.
sending node performs a handshake with the receiv-
ing node to make sure that the other is ready to re-
ceive the message and prepare its buffers accordingly.
Eager protocol causes different behavior on sending
and receiving nodes, which we want to avoid for now.
Hence, we use MPI_Ssend, the synchronized version
of the MPI_Send that forces a rendezvous. Due to this
constraint a node cannot send and receive at the same
time.
4.2 Implementation Details
For verifying our model we only implemented one di-
mension of the Shift algorithm (distribution in row).
Since all three dimensions use the exact same al-
gorithm only with a difference in message size,
we can safely assume that if we verify the one-
dimensional model with different message sizes, the
three-dimensional model is valid as well (small over-
head for repackaging not considered).
Since every node receives the same number of
data elements, each node knows the number of data
elements each other node holds. From this informa-
tion and the given cutoff radius k, one can extract the
number of data elements that will be received during
the course of the algorithm. The buffer is then al-
located to fit 2k + 1 messages. Each node places its
own data in the middle of the buffer (buffer[k]).
The data it receives will be filled into the buffer
sorted by origin. The data of the Right neighbor
will be filled into the next buffer spot after the own
data (buffer[k+1]) and the data of the Left neigh-
bor into the spot before the own data (buffer[k-1]),
then the data of the second-next neighbors into
buffer[k+2] and buffer[k-2], and so on. This
helps with finding the matching data for every mes-
sage.
To ensure correctness of the algorithm, we send
test data with each message. So, each node’s buffer
space is filled with test data to check results later, the
rest of the communication buffer is cleared. Then,
all processors are synchronized via MPI_Barrier and
the time measurement begins.
The ranks a node communicates with are calcu-
lated with modulo arithmetic to ensure correct behav-
ior at the ends of the communicator (we have peri-
SIMULTECH 2023 - 13th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
314

odic boundary conditions for the simulation space).
A node, before sending or receiving a message, calcu-
lates the rank of the real source of the next incoming
and outgoing message in order to place it in or retrieve
it from the correct spot in the message buffer.
Due to the use of MPI_Ssend, we need to assure
that no deadlocks will occur (e.g. two nodes posting a
receive call for each other). To avoid that, we use an
even-odd-pattern for the communication, where the
nodes with an even rank are depicted in blue and those
with an uneven rank are depicted in orange (for visu-
alization see Fig. 5). In the first step, each blue node
sends its message while the orange nodes receive the
messages; in the second step, the roles swap and the
orange nodes become senders while the blue ones re-
ceive the messages. Since we used 64 nodes, we did
not need to consider an extra phase for the case of two
blue nodes meeting at the edges of the row.
Further, we dictate a sequence for the communica-
tion: first we daisy-chain all right messages k times,
then we daisy-chain all left messages k times. An-
other way would be to interleave the right and left
messages.
After all of the 2k messages have been exchanged,
the measurement ends and the message buffers are
checked for correctness.
4.3 Implementation Measurements
We used 64 nodes and ran the algorithm 100 times
for each cut-off k ∈ [1, 10]. This resulted in 6400 data
elements per k-value. So, all measured values pre-
sented in this work are averaged over 6336 measure-
ments (the first measurement of each node is excluded
because it is 100 times slower than the rest due to the
path routing process).
4.4 Hockney Parameters
As (Lastovetsky et al., 2009) wrote in their paper, the
Hockney parameters α and β are typically estimated
by statistically evaluating one of two series of point-
to-point communications:
• Roundtrips between two nodes with an empty
message to determine α and roundtrips between
two nodes for each relevant message load to de-
termine β with respect to m.
• A series of roundtrips with a growing message
load, so that a linear regression can be fitted over
the resulting curve.
Some of our messages are too small to show a linear
relation (messages <50kB), so we used the first op-
tion for our measurements. To make sure that we do
Table 1: Message latency in relation to message load with
derived Hockney parameter β.
load [byte] latency [ns] σ [ns] β [ns/byte]
0 2,122 176 –
10 2,234 183 11.246
100 2,686 302 5.645
1,000 2,881 305 0.760
10,000 4,808 307 0.269
100,000 15,055 749 0.129
not have different latencies between node pairs due
to varying physical distance of nodes, we measured
the latency between nodes from different racks. After
making sure that we have sufficient location invari-
ance (physical distance has no measurable influence
on the latency), we gathered data over several days
with a morning and an afternoon measurement with a
set of four random nodes each time (to account for dif-
ferent network load patterns of other users that might
influence our model negatively).
We used a one-to-all ping pong from the node with
MPI rank zero to the three other nodes of the set. For
each pair we returned for every value m
1
the average
over 10,000 roundtrips. Overall, we performed ten
measurements, getting thirty sets of data per m
1
-value
per measurement, so 300 data elements for each mes-
sage load value m
1
.
We determined the Hockney parameters by using
the average over all 300 data elements per m
1
-value.
Table 1 shows the average latency by load m
1
and
the derived β (standard deviation σ over 300 data ele-
ments); the latency value for zero bytes is used for α.
5 SHIFT MODEL ANALYSIS
We explained in Section 4.2 that we implemented
only one dimension/phase of the Shift, so we use
Equation 1 multiplied by two to predict the timing be-
havior for the Shift in the row dimension.
Table 2 shows one representative example of
the measurements and predictions for the one-
dimensional Shift algorithm with the respective stan-
dard deviation σ for the measurements; tables for the
other message loads can be found in the Appendix.
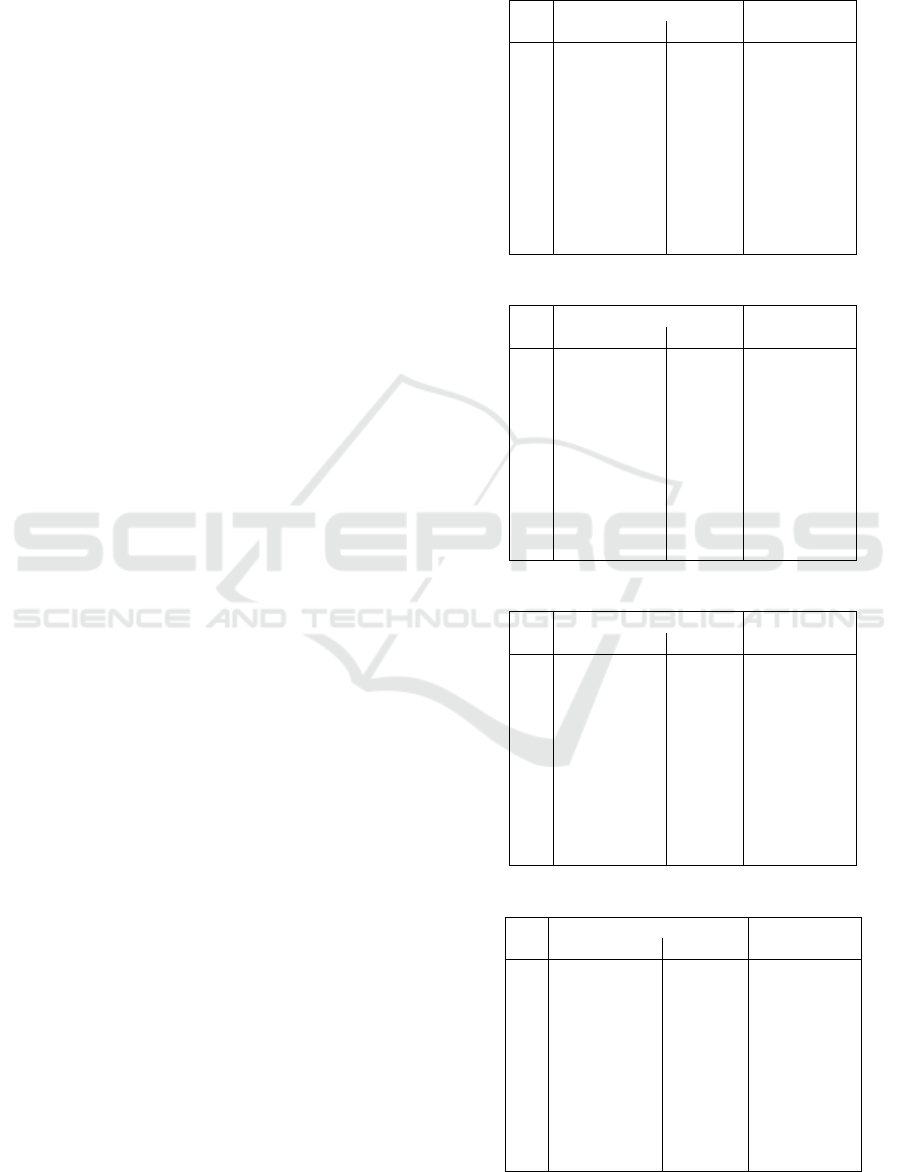
The data in Tables 2 to 6 shows that the model
works very well for message loads m
1
of 10 to
1,000 bytes but becomes less accurate for larger m
1
.
However, our predictions are within the stan-
dard deviation of the measurements for all message
loads (10 to 100,000 bytes), hence our model can be
considered correct.
Analytical Model of Communication Algorithm for Simulations with Range-Limited Interactions
315

Table 2: Shift (1D) with m
1
= 1, 000 bytes.
k measured predicted
latency [ns] σ [ns] latency [ns]
1 13,804 5,294 11,526
2 22,494 3,715 23,051
3 34,814 6,499 34,577
4 45,422 8,145 46,103
5 55,957 11,090 57,628
6 68,121 20,231 69,154
7 78,428 15,781 80,679
8 93,194 21,057 92,205
9 102,293 18,898 103,731
10 114,216 20,178 115,256
6 CONCLUSION
6.1 Summary
We want to model two communication algorithms,
Shift by (Plimpton, 1995) and Team Shift by (Driscoll
et al., 2013), in order to equip out MDS library FM-
Solvr with an adaptive communication module that
can choose the communication algorithm based on the
hard- and middleware of the underlying system (re-
spective the α and β of the Hockney model).
In this work we present an analytical model for
the Shift communication algorithm and verified it by
implementation.
6.2 Discussion and Future Work
6.2.1 Implementation
We imposed certain constraints upon our system (see
Sec. 4.1 and 4.2), which we will relax on our way to a
realistic performance model. Our strongest constraint
is that we forced the synchronous rendezvous on our
system by using MPI_Ssend. This constraint has to
be relaxed in order to benefit from using MPI_Send or
even MPI_Isend and get a more efficient implemen-
tation.
By using MPI_Ssend or MPI_Send we are forced
to dictate a pre-defined pattern for the communication
by sending first all messages to the right, then all mes-
sages to the left. The Shift algorithm allows for self-
synchronization, so once we allow using MPI_Isend
we are able to let go of the constricting rules of where
to send first and can decide the next message based on
which data is already available.
6.2.2 Hockney Parameters
As we already concluded in Section 5, the data in
Tables 2 to 6 shows that the model works very well
for m
1
∈ [10,1000] bytes but becomes less accurate
for larger m
1
. We can also see that the latencies for
the three smaller m
1
show barely any difference (not
even 20 µs between 10 and 1,000 bytes for k = 10)
while the difference increases to almost twice the
amount of time between 1,000 and 10,000 bytes and
again to about thrice the time between 10,000 and
100,000 bytes.
We think that the inaccuracy of the model for
larger m
1
might be because the Shift algorithm is
causing a lot of traffic in the network which becomes
noticeable once the message size starts to saturate the
bandwidth more. However, a single ping pong mea-
surement does not create its own background traffic.
Our approach is to re-measure α and β while creating
a lot of traffic in the background so as to simulate the
algorithm limiting itself.
6.2.3 Data Analysis
Since our data has not been filtered apart from drop-
ping the first measurement of each node, we can see
in Tables 2 to 6 that our standard deviation is com-
parably high (a sign for noisy measurements). In a
few cases so much so that it makes the usefulness of
the resulting average questionable (m = 10,000 bytes,
k ∈ {2,9}, and m = 100,000 bytes, k ∈ {6,8}).
One approach we tried was to use only the 20%
smallest values with the argument that we are inter-
ested in the best case anyway and everything above
that is influenced by network noise. This must re-
flect in the α- and β-values too, so we excluded the
higher values in the α and β measurements. This ap-
proach delivers extremely good standard deviations of
less than 2 µs (in most cases even less than 1 µs, and
in very few cases for 10,000 and 100,000 bytes up to
4 µs) and makes the model an almost perfect fit for the
measurements.
However, we did not filter α and β systematically
for the smallest 20% and we cannot give a more justi-
fied reason behind the selected 20% margin other than
trial-and-error evaluation. Future work will be to re-
evaluate all data in this fashion systematically.
6.2.4 Analytical Models
A comprehensive complexity analysis is not part of
this work since it is trivial in case of the Shift algo-
rithm.
The model already is a non-rendezvous version,
i.e. a version where a node can send and receive at the
same time, so it should be able to model an implemen-
tation with MPI_Send or MPI_Isend. After looking at
the future work proposed in 6.2.2 and 6.2.3, we will
measure these implementations next. Then we will
look at the model for the Team Shift.
SIMULTECH 2023 - 13th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
316
ACKNOWLEDGMENTS
This research is funded by DFG project FMHub,
project Nr. 443189148. Our thanks goes to Andreas
Beckmann
2
and Martin Richter
1
for helping with the
implementation and evaluation respectively.
REFERENCES
Bonachea, D. and Hargrove, P. (2018). GASNet-EX: A
High-Performance, Portable Communication Library
for Exascale. In Proceedings of Languages and Com-
pilers for Parallel Computing (LCPC’18).
Culler, D., Karp, R., Patterson, D., Sahay, A., Schauser,
K. E., Santos, E., Subramonian, R., and Von Eicken,
T. (1993). LogP: Towards a realistic model of paral-
lel computation. In Proceedings of the fourth ACM
SIGPLAN symposium on Principles and practice of
parallel programming, pages 1–12.
Dang, H.-V. and Snir, M. (2018). LCI: Low-level communi-
cation interface for asynchronous distributed-memory
task model. In ACM Conference (Conference’17).
Driscoll, M., Georganas, E., Koanantakool, P., Solomonik,
E., and Yelick, K. (2013). A Communication-Optimal
N-Body Algorithm for Direct Interactions. In 2013
IEEE 27th International Symposium on Parallel and
Distributed Processing, pages 1075–1084.
Fortune, S. and Wyllie, J. (1978). Parallelism in random
access machines. In Proceedings of the tenth annual
ACM symposium on Theory of computing, pages 114–
118.
Hockney, R. W. (1994). The communication challenge for
MPP: Intel Paragon and Meiko CS-2. Parallel Com-
puting, 20(3):389–398.
Hockney, R. W. and Jesshope, C. R. (1988). Parallel Com-
puters 2: architecture, programming and algorithms.
IOP Publishing Ltd.
Lastovetsky, A., Rychkov, V., and O’Flynn, M. (2009). Re-
visiting communication performance models for com-
putational clusters. In 2009 IEEE International Sym-
posium on Parallel & Distributed Processing, pages
1–11. IEEE.
Liem, S. Y., Brown, D., and Clarke, J. H. R. (1991).
Molecular dynamics simulations on distributed mem-
ory machines. Computer Physics Communications,
67(2):261–267.
Plimpton, S. (1995). Fast Parallel Algorithms for Short-
Range Molecular Dynamics. Journal of Computa-
tional Physics, 117(1):1–19.
Valiant, L. G. (1990). A bridging model for parallel compu-
tation. Communications of the ACM, 33(8):103–111.
Werner, T., Kabadshow, I., and Werner, M. (2022). System-
atic Literature Review of Data Exchange Strategies for
Range-limited Particle Interactions. In Proceedings of
the 12th International Conference on Simulation and
Modeling Methodologies, Technologies and Applica-
tions, pages 218–225.
APPENDIX
Table 3: Shift (1D) with m
1
= 10 bytes.
k measured predicted
latency [ns] σ [ns] latency [ns]
1 11,360 4,332 8,937
2 19,478 1,765 17,873
3 30,071 8,554 26,810
4 39,338 11,080 35,746
5 48,424 10,598 44,683
6 58,701 16,412 53,619
7 66,476 9,267 62,556
8 75,920 10,316 71,492
9 88,762 24,108 80,429
10 97,072 25,594 89,366
Table 4: Shift (1D) with m
1
= 100 bytes.
k measured predicted
latency [ns] σ [ns] latency [ns]
1 12,108 3,489 10,745
2 21,388 4,860 21,489
3 32,193 5,712 32,234
4 41,966 6,732 42,978
5 52,296 11,298 53,723
6 62,299 10,229 64,467
7 73,683 14,560 75,212
8 84,488 23,172 85,956
9 91,207 15,943 96,701
10 101,664 15,741 107,446
Table 5: Shift (1D) with m
1
= 10, 000 bytes.
k measured predicted
latency [ns] σ [ns] latency [ns]
1 21,925 7,736 19,233
2 49,498 52,127 38,465
3 65,985 29,351 57,698
4 82,636 18,911 76,931
5 102,159 21,077 96,163
6 121,945 20,153 115,396
7 143,613 38,003 134,629
8 164,761 38,274 153,861
9 198,848 86,793 173,094
10 207,388 52,577 192,327
Table 6: Shift (1D) with m
1
= 100, 000 bytes.
k measured predicted
latency [ns] σ [ns] latency [ns]
1 62,708 7,353 60,219
2 127,668 19,557 120,438
3 191,647 29,054 180,657
4 263,956 65,629 240,877
5 319,701 65,497 301,096
6 467,980 492,450 361,315
7 448,284 83,874 421,534
8 565,866 389,992 481,753
9 585,111 109,965 541,972
10 671,048 169,343 602,192
Analytical Model of Communication Algorithm for Simulations with Range-Limited Interactions
317
