
LiDAR-GEiL: LiDAR GPU Exploitation in Lightsimulations
Manuel Philipp Vogel
a
, Maximilian Kunz
b
, Eike Gassen
c
and Karsten Berns
d
Robotics Research Lab, Dep. of Computer Science, RPTU Kaiserslautern-Landau, Kaiserslautern, Germany
Keywords:
Robotic, Simulation, Sensors, Framework, Architecture, LiDAR.
Abstract:
We propose a novel Light Detection And Ranging (LiDAR) simulation method using Unreal Engine’s Niagara
particle system. Instead of performing the ray traces sequentially on the CPU or transforming depth images
into point clouds, our method performs this particle-based approach using GPU particles that execute one
line trace each. Due to execution on the GPU, it is very fast-performing. In order to classify the results,
the new implementation is compared to existing ray-tracing and camera-based LiDAR. In addition to that
we implemented and compared common LiDAR approaches using ray-tracing as well as depth images using
cameras. A general architecture for easy exchange between simulated sensors and their communication is
given using the adapter pattern. As a benchmark, we evaluated real sensor data with a ray tracing-based
virtual sensor.
1 INTRODUCTION
Using a simulation before testing in the real world
is quite common in the field of robotics. By doing
so, one conducts tests quickly, without the need to
travel to the testing area and set up the scenarios.
This avoids the necessity to have the robot together
with its sensors close by enabling the possibility for
parallel and distributed collaboration over long dis-
tances. Furthermore, the total control of the environ-
ment and everything within guarantees scenarios that
are not possible or too dangerous in field tests. It is,
for example, easy to change the time of day as well as
weather conditions like rain and snow within seconds.
Regarding safety issues, testing scenarios like crashes
or incidents involving pedestrians are simulated in a
controlled environment without damaging individuals
or equipment. Another application is the generation
of training data for neural networks(Vierling et al.,
2019). Changes in lighting, viewing angles, and auto-
matically created annotations are used to create data
sets of realistic-looking images.
Since simulations are working with models of ob-
jects, there are differences from reality. They are sim-
plified illustrations compared to the represented ob-
jects (Stachowiak, 1973). Considering only the im-
a
https://orcid.org/0000-0000-0000-0000
b
https://orcid.org/0009-0006-5268-5162
c
https://orcid.org/0000-0002-1271-6781
d
https://orcid.org/0000-0002-9080-1404
portant properties, it facilitates the complexity and the
chaotic nature of the real environment. No simulation
mimics the complete state of the environment with all
its dynamic aspects and physical occurrences that can
be observed in the real world. In the case of an ideally
modeled LiDAR sensor, the simulation needs a phys-
ically correct representation of light photons. Taking
into account absorption, and reflection in every frame
for every sensor. Such accurate simulations are be-
yond the scope of standard hardware and require sev-
eral additional information about the environment.
In terms of computer simulation, there is a trade-
off between the complexity of the simulation and the
needed computing power and time. The optimal way
to utilize the advantages of a simulated environment
is to keep the complexity as low as needed for the
application.
The used Unreal Engine (UE)
1
is a game engine
developed by Epic Games
2
. It features real-time as
well as physical-based rendering. Providing a physics
engine, a large community, and a marketplace with
monthly free content makes it a viable simulation
software.
In this paper, UE is used for simulation of robots,
their sensors and the environments they operate in.
The implementation of the simulated sensors follows
the physical principle of the real sensors. The imple-
mented robots are digital copies of the vehicles based
1
https://www.unrealengine.com/en-US/
2
https://epicgames.com/
Vogel, M., Kunz, M., Gassen, E. and Berns, K.
LiDAR-GEiL: LiDAR GPU Exploitation in Lightsimulations.
DOI: 10.5220/0012085900003546
In Proceedings of the 13th International Conference on Simulation and Modeling Methodologies, Technologies and Applications (SIMULTECH 2023), pages 71-81
ISBN: 978-989-758-668-2; ISSN: 2184-2841
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
71

Table 1: Comparison of different LiDAR systems.
CPU Ray Tracing LiDAR Depth Camera LiDAR Particle LiDAR (ours)
Collision accuracy Collision Mesh Visual Depth Global Distance Fields
Performance No GPU acceleration
GPU acceleration, but overhead
from oversampling
GPU acceleration
Intensity simulation Hard (extra cameras needed) Easy Hard (extra cameras needed)
Label generation Easy Hard (needs stencil buffer) Very Hard
Simulation of rotating LiDAR Hard Very hard Easy
Noise simulation CPU bound
In parallel as post-processing of
the image
in parallel on the GPU
Modification to Environment Avoid Foliage None
Avoid thin or very small ob-
jects/object parts
Other Problems None
Accuracy depends on bit depth
of Depth Buffer
Resolution dependent on dis-
tance to viewer.
on Computer-Aided Design (CAD) data.
2 RELATED WORK
The most common approach to simulate a LiDAR in
the UE is CARLA(Dosovitskiy et al., 2017). This plu-
gin provides the simulation of a LiDAR based on CPU
raytracing. In addition, CARLA provides other sen-
sors, such as a depth camera. Therefore, it is used for
autonomous driving simulations. To include motion
effects, LiDARsim(Manivasagam et al., 2020) intends
to build a simulation based on the real world. It sim-
ulates a LiDAR sensor including motion effects by
dividing each scan into 360 parts and simulating one
degree of the rotating LiDAR scanner in each time
step. (Hossny et al., 2020) outperformed the LiDAR
simulations by using 6 depth cameras and projecting
the images onto a sphere, where LiDAR points are
sampled. In addition to the performance improve-
ments caused by the omission of CPU ray traces, the
authors add noise textures to the depth images to ef-
ficiently simulate LiDAR measurement noise. (Hurl
et al., 2019) implemented a depth camera-based Li-
DAR sensor to generate a LiDAR dataset in the sim-
ulated world of the game GTA V. Another depth
camera-based approach was utilized in (Fang et al.,
2018), which also provided formulas to estimate the
intensity of the LiDAR.
2.1 Contribution
To our knowledge, we are the first paper to exploit
GPU particles for LiDAR simulations. Additionally,
we compared the performance to different common
implementations. To quantify the virtual results, we
compared them to real sensor recordings. For better
exchangeability, we provided a general sensor archi-
tecture using the adapter pattern.
3 SENSORS
(Wolf et al., 2020) gives an overview of the already
implemented sensors in UE used by the Robotics Re-
search Lab, RPTU Kaiserslautern. New approaches
to the implementation of the sensors are described and
compared in section 3.
3.1 Structure
This subsection describes the general architecture of
our virtual sensors in the Unreal Engine. The basic
design idea is that new concepts like sensors and com-
munication principles can be integrated easily into
the existing environment without having to take care
of the basic functions. To achieve this, the adapter
design pattern was used. It provides the portability
needed for different applications. Figure 1 shows a
simplified UML diagram of the sensor design. Note
that parameters and methods have been omitted for
the sake of readability. A complete diagram can
be found on our GitHub organization
3
. Addition-
ally, UE-specific naming conventions were ignored
for the same reason. The detailed diagrams in fig-
ure 2 show the parameters and methods as an exam-
ple. The class SensorParent is the base class for ev-
ery sensor and contains parameters and functionality
like the name of the sensor (SensorName), its repre-
sentation as a 3D model(SensorMesh) and other val-
ues like its frequency (TickIntervall). For an unam-
biguous definition of sensor parameters and the out-
put data, all sensors use structures defined in the spe-
cific class (Parameters for RayTracingLiDARActor)
as input parameters and globally defined output struc-
tures in the Utility class. This assures that each Li-
DAR sensor type has the same structure of its output.
That fact is used in the AdapterComponent, which
3
https://github.com/RRLAB-KL/Sensors
SIMULTECH 2023 - 13th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
72
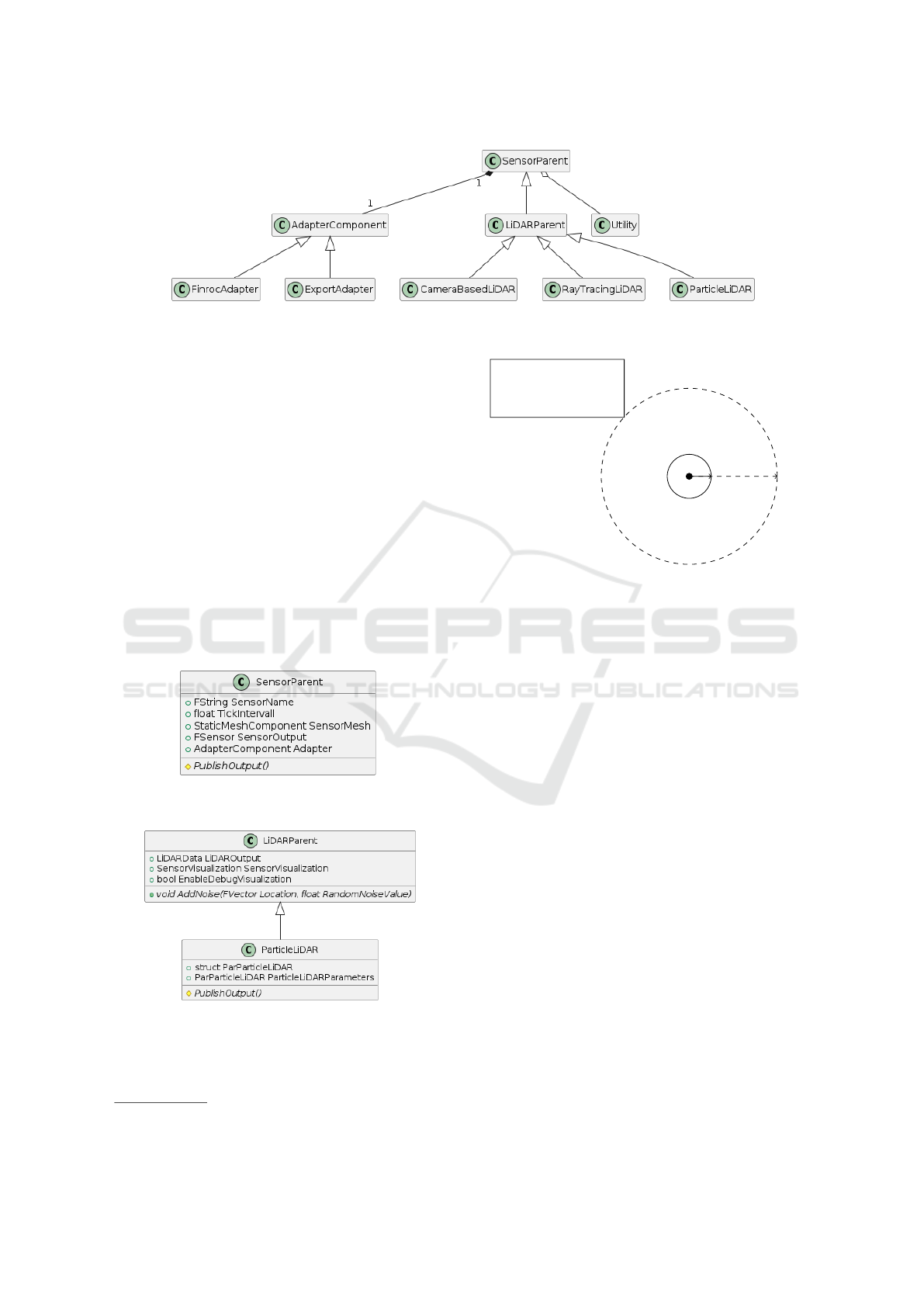
Figure 1: Simplified UML diagram of the components of the sensors as well as the adapters. A more detailed version can be
found on GitHub.
has a specific implementation in each sensor (Adapter
of the SensorParent). Independent from the specific
sensor, the method PublishLiDARData receives a Li-
DAR structure (defined in Utility) as an input. The
specific behavior is implemented in the correspond-
ing adapter child class. The ExportAdapter takes the
structure and writes the points of the point cloud into
a CSV file for later processing. The FinrocAdapter
converts the unreal data to custom data types used
by our robotic framework Finroc
4
. The parent class
for every LiDAR-based sensor is the class LiDAR-
Parent. Here, the output structure LiDAROutput is
stored which contains the output data like an array of
3-dimensional points, the field of view, the number of
scan lines, and additional data. The method AddNoise
uses a simplified noise model provided by the Utility
class and is overwritable.
(a) Class diagram of the SensorParent class which
is the parent class of all sensors.
(b) Class diagram of the LiDARParent and its
child, the ParticleLiDAR.
Figure 2: More detailed class diagrams of the SensorParent
and the ParticleLiDAR sensor with its direct parent.
4
https://www.finroc.org/
v
0
: Noise scaling
v: Random
unit vector
v
v
0
Figure 3: Visualization of our simple sensor model. The
input value is represented by the black dot in the center. The
vector v is the random unit vector which is multiplied by a
scaling value resulting in the vector v
0
which is the original
vector with additional noise.
Figure 3 shows a visualization of the sensor
model. For simplicity, only the case for 2D is consid-
ered. The raw input value is represented by the black
dot in the center. First, a random unit vector (v) is
generated which is multiplied by a noise scaling value
defined by the user. The resulting vector v
0
represents
the original value with additional noise. The class
ParticleLiDAR shows the minimalistic setup neces-
sary for the integration in the system. They define
their specific parameters in a structure and override
the PublishOutput method based on how the point
cloud is generated. The use of the adapter pattern
in this approach has two big advantages. First, ev-
ery new LiDAR sensor is integrable into the existing
system also using every adapter as long as it stores
its values in the struct LiDAROutput and implements
the method PublishOutput. Second, if an additional
adapter is implemented, all the existing sensors are
usable. For this, the conversion of unreal data to the
new data types is defined in the method PublishLi-
DARData.
LiDAR-GEiL: LiDAR GPU Exploitation in Lightsimulations
73

3.2 LiDAR
Different LiDAR technologies have evolved over time
(see Figure 4). The practically most used technol-
ogy is mechanically rotating LiDARs. Therefore, the
simulation of LiDAR sensors focuses on these sys-
tems. This enables the virtual testing of algorithms
in a simulated environment and the gathering of syn-
thetic data. Table 1 compares the state-of-the-art al-
gorithms with our proposed method.
Figure 4: Classification of LiDAR systems (Wang et al.,
2020).
3.2.1 CPU Ray Tracing
The most widespread method of LiDAR simulation
is sending a specified number of traces in several di-
rections and returning to the hit location. It is deter-
mined by the intersection of one ray with an object
in the environment. Unreal Engine provides a CPU-
executed function dedicated to this purpose called
LineTraceSingleByChannel. The advantages of this
method include the high precision of the collision
point with the environment, and no communication
between GPU and CPU is needed. Additionally, the
actors at the collision point can be retrieved directly,
which allows better possibilities for recording LiDAR
datasets. Since Unreal Engine executes each line trace
sequentially on the CPU, this method results in non-
optimal performance. The second-biggest disadvan-
tage of this method is that the CPU traces collision
meshes rather than the actual visual scene. Even if
the full-scale object is used as the collision mesh, dis-
placement effects such as bump maps or tessellation
alter the scene without modifying the collision mesh.
Retrieving material properties such as roughness from
a Line Trace is not directly possible in Unreal En-
gine.Therefore, additional methods have to be used to
acquire the intensity values of the point cloud. For
example, different depth cameras are used to mea-
sure the surface properties or the amount of surface
reflected light. This is implemented by simulating a
light source at the position of the LiDAR. Then the
amount of reflected light towards it is measured (al-
though NIR light must be approximated by red light
since UE lacks NIR light simulations).
3.2.2 Depth Camera Based Techniques
A common approach to increase performance is to
eliminate the ray traces on the CPU using depth im-
ages. In depth-camera-based approaches, multiple-
depth images of the scene are rendered. The Depth
Buffer of each image is used to acquire the depth
channel of the image. Then, the RGBD image is
transformed into a 3D point cloud using the follow-
ing formulas from PseudoLidar (Wang et al., 2019):
z = Depth,
x =
(UV [0] − 0.5) · z
tan(FOV [0]) · 0.5
,
y =
(UV [1] − 0.5) · z
tan(FOV [1]) · 0.5
(1)
where UV∈ [0,1] is the pixel location and FOV is the
field-of-view in the horizontal and vertical direction.
Different pixels in one row of the image correspond to
different vertical angles of the LiDAR, since the pro-
jection of vertically equal polar angles into the image
causes hyperbolic lines in the image plane (see Fig-
ure 5). Various methods have emerged to counter the
unrealistic distribution of rays that would result from
a trivial approach to map one pixel-row to a LiDAR
scan line directly. These methods include hyperbolic
approximations (Wolf et al., 2020), projections of unit
points into the images (Hurl et al., 2019), and spheri-
cal image wrapping (Hossny et al., 2020).
Figure 5: Visualization of LiDAR scan lines with 11.25°
spacing in an image with 120° FOV.
In the following section, only the projections of
unit points are considered for comparison.
Depth-Camera-based LiDAR sensors have the advan-
tage of using visual depth. This is the most accurate
representation of the scene in game engines since dis-
placement effects are also taken into account. The
SIMULTECH 2023 - 13th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
74

disadvantages are the lower precision of the depth
at higher distances, as well as the resulting delay in
transferring images from GPU to CPU.
3.2.3 Particle LiDAR
Game engines use particles for visual effects that re-
quire a higher number of operations, but lower inter-
action between particles. The simulation of sparks
in flames is one such example. The resources of the
GPU are sufficient to simulate these particles entirely
and the export to the CPU takes place when the data
is needed.
Unreal Engine’s particle Engine Niagara provides
enough functionality to simulate a single laser beam
on one particle. The underlying principle of particle-
based LiDAR sensors is to first generate particles,
each performing a line trace, calculated on GPU. Af-
terward, all collision points of the entire line traces
are exported to the CPU. This results in a high-
performance LiDAR model. It provides one of the
most efficient ways of visualizing point clouds in sim-
ulation. Depending on the use case, different varia-
tions of this approach can be implemented, the basic
one is:
Algorithm 1: Basic Particle Lidar.
Input: SensorTransformation S
1 Initialization: Spawn particles
2 while sensor running do
3 Place particles in a unit sphere around S
4 for particle do
// in parallel
5 dir = particle.location expressed in S
6 LineTrace(start:S.loc, direction: dir)
7 particle.positon = LineTrace.result
8 Export positions of all particles
Instead of Algorithm 1, one can use a time interval
[t
0
,t
n
], split into n timesteps, and in each time step t
i
,
1/n of the traces are performed to simulate a rotating
LiDAR.
Another variant of the algorithm is to destroy par-
ticles that do not collide, and hence have the location
(0,0,0). This step is executed simultaneously for all
particles but requires the respawning of those in the
next frame.
The collision position can also be directly ex-
pressed in relation to the sensor. Thus the execution of
the transformation on the CPU is avoided. The draw-
back of this option is that the visualization of the par-
ticles does not align with the actual collision points
anymore. For example, using this variant, the particle
that collides with an object 1m in front of the sensor
(a) Rendered Scene. (b) Scene Depth.
(c) Collision Mesh. (d) Signed Global Dis-
tance Fields.
Figure 6: Visualization of different collision methods.
would be displayed at p = (1,0,0)
T
in the world co-
ordinate system.
Particle Tracing. In UE, there are two types of
traces that a particle can perform. One is a spher-
ical trace for the distance fields, which is available
in UE4 and UE5. It is compatible with every op-
erating system and graphics card. Distance fields
are seen as low-resolution copies of the environment.
They are used by UE to efficiently simulate shad-
ows and global illumination. Although the low res-
olution of these fields greatly accelerates line traces,
the blurry geometry shapes lead to much smoother Li-
DAR point clouds compared to real ones. The alterna-
tive is the use of UE’s Hardware Ray-Tracing for col-
lision detection. It was added experimentally in the
UE5 Update but is only available on Windows with
NVIDIA RTX GPUs. This paper focuses on the for-
mer method, while the latter can be explored in the
future.
3.2.4 Comparison
Tracing Collisions. Each method of LiDAR simu-
lation uses a different method for the ray-environment
collisions, see figures 6. CPU Ray Tracing uses the
collision meshes of the object. It represents the mesh
in a detailed, yet simplified way. Depth Camera based
methods use the scene depth buffer. The particle-
based method uses the global distance fields. The
highest accuracy is performed by the depth buffer,
since it takes also displacement effects into account.
LiDAR-GEiL: LiDAR GPU Exploitation in Lightsimulations
75

(a) Rendered Scene. (b) Scene Depth.
(c) Collision Mesh. (d) Signed Global Dis-
tance Fields.
Figure 7: Collision visualization of foliage on two different
scales. The bush consists geometrically of displaced planar
faces, which leads to problems with the mesh reconstruc-
tions from a distance field.
This is not the case for collision meshes. In distance
fields
5
, the environment is split into voxels, where
each voxel stores the distance to the nearest trian-
gle. Distance fields are even less detailed than col-
lision meshes. They are meant to be a low-resolution
representation of the environment. It is used for Un-
real’s light engine Lumen and other parts that require
a resolution/performance tradeoff. The resolution of
these fields also varies based on the distance to the
viewer, and problems occur when the mesh has non-
volumetric parts, as in Figure 7.
Performance. Using the CPU for Line Tracing is
the slowest method since the traces are performed se-
quentially in Unreal Engine. However, involving the
GPU leads to communication delays because sending
information from the GPU to the CPU takes a longer
time. Depth Buffer methods have to capture and send
more information to the CPU compared to Particle Li-
DAR methods. That makes Particle LiDAR systems
the theoretically fastest method for simulation. This
enables the simulation of the motion effects of LiDAR
sensors.
Benchmarking Results (settings as in 4.1):
The time to create a point cloud is measured on an
NVIDIA A10G with a simple scene. The export of
5
https://docs.unrealengine.com/5.0/en-US/mesh-dista
nce-fields-in-unreal-engine/
the point cloud is not considered in the timing.
Ray Tracing: 165ms for 64 channels, 1040 ms for
512 channels
Depth Camera: 70 ms for 64 channels, 220 ms for
512 channels
GPU Particles: 42ms for 64 channels, 50 ms for 512
channels
This shows that GPU Particles are the fastest avail-
able method for generating point clouds, and that the
number of points does not affect the performance as
much as it does affect other methods. Visualizing the
points takes an additional 120 ms or >1000 ms for 64
channels or 512 channels, respectively. Only the Par-
ticle LiDAR visualizes the point cloud without perfor-
mance decreases. Hence, it is the only real-time capa-
ble method for capturing and visualizing large point
clouds
6
.
4 EXPERIMENTS
First, the simulated point clouds of the different Li-
DAR sensors are compared qualitatively. The second
part of the experiments describes the comparison be-
tween real recordings and virtual point clouds. For
this, simple objects are chosen and recreated in the
simulation. During our experiments with the virtual
sensor, it turned out that the objects we chose were
too small for the particle LiDAR and our implementa-
tion of the camera-based LiDAR. Thus, we restricted
our comparisons to the Ray Tracing sensor.
4.1 Point Cloud Difference
To measure the accuracy decrease of particle LiDARs,
we calculated the mean distance between points in a
point cloud from a Ray Tracing sensor and particle
sensors. To put that value into context, we also pro-
vide the same measurements between Ray Tracing Li-
DARs and Depth-Camera LiDARs.
4.1.1 CPU Ray Tracing
The LiDAR to represent a CPU Ray Tracing sensor
was based on CARLA’s LiDAR simulation, adapted
for native UE and without noise simulation.
4.1.2 Depth Camera LiDAR
Instead of the standard six cameras needed to render
the entire surrounding, only three with 120
◦
FOV and
6
The performance of GPU particle was measured with
visualizing the particles
SIMULTECH 2023 - 13th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
76

2048x2048 resolution were used to maximize perfor-
mance.
A further improvement is the use of custom post-
processing materials. It transforms each point into 3D
local coordinates during the rendering of the image.
This also takes the rotation of two of the cameras into
account. The resulting image now has the XYZ coor-
dinates of the surface point for each pixel in the RGB
channels. Then the CPU reads the pixel values for
specific pixels and adds an offset to the coordinates.
The downside of this is that the 3D coordinates are
getting quantized.
To find out which pixels are relevant, the horizon-
tal and vertical angles of the LiDAR scan points are
calculated. Unit vectors made of these angles are pro-
jected into the camera image. Through this, pixels
corresponding to particular LiDAR points are found.
4.1.3 Particle LiDAR
To enable meaningful benchmark, no motion effects
were simulated and algorithm 1 was used.
4.1.4 Measurement Method
Figure 8: Visualization of a point from different simulation
methods. Red: Ray tracing (used as a reference). Blue:
Depth camera approach. Orange: Particle LiDAR.
For every point in the ray tracing point cloud, we
calculated the Euclidean distance to the nearest point
in the depth camera point cloud as well as to the near-
est particle LiDAR point cloud. The distances were
then averaged. Figure 8 shows the different point
clouds. For the depth-camera based approach, the
points are forming a grid, caused by the quantization
of the XYZ values, and in the distance, each ring is
made up of straight lines due to the quantization of
the depth buffer.
Results:
Mean distance Ray Tracing LiDAR and Particle Li-
DAR:
0.936m
Mean distance Ray Tracing LiDAR and Depth Cam-
era LiDAR:
0.447m
The results from the Particle LiDAR, when assuming
the ray tracing as a reference, are worse than those
from depth camera LiDAR, but it shows, that the data
follows the same structure. However, the results de-
pend strongly on the used scene, making a standalone
statement nearly impossible.
4.2 Comparison with Real Sensors
To evaluate the different simulated sensors (see sub-
section 3.2), they are compared with a real one. A
problem is the meaningful comparison of the two
sources. It requires an accurately measured environ-
ment that is replicated in the simulation and a detailed
sensor model considering its noise. Since our noise
model is very basic, simple-shaped objects are cho-
sen as benchmarks. We measured them at different
distances from the sensor. In the real environment,
we used the Ouster OS1
7
laser scanner with a verti-
cal resolution of 128, a horizontal resolution of 1024
and 360
◦
field of view. For recording, we chose three
different objects: two cardboard boxes with the di-
mensions of 237x114x179 and 322x215x295 both in
mm, as well as a bin with a diameter of 270mm and
a height of 300mm. For a qualitative comparison, we
recorded the objects, both in simulation and reality.
We alter the distances between one and six meters
with an increment of one meter. For a more robust
comparison, we recorded around five seconds of data
for every object and distance. This takes into account
noise and outliers and results in 36 recordings. The
setup is shown in figure 9.
Figure 9: Setup of our recordings. The object in the middle
(C) is the large box. The laser measure (B) is next to the
laser scanner (A) in the lower left corner.
7
https://data.ouster.io/downloads/datasheets/datasheet-
rev7-v3p0-os1.pdf
LiDAR-GEiL: LiDAR GPU Exploitation in Lightsimulations
77
4.2.1 Preprocessing
Since we are only interested in the comparison of the
predefined objects, the recorded point clouds have to
be preprocessed. For this, individual scans were ex-
tracted from the five-second recording. These scans
were imported into the open-source 3D modeling tool
Blender
8
. There, the background points were re-
moved manually. Here, we defined the hull of the
recorded object and placed it at the same location as
in the recording. The overlapping points of the scan
are assumed to be the points belonging to the recorded
object. To account for the noise we increased the scale
of the object. The tolerance is around 10cm. This pro-
cess was repeated five times for every recording. 180
point clouds of the objects at varying distances and at
different times were extracted. In the simulation, we
recreated the objects and recorded them with our Ray
Tracing sensor.
4.2.2 Evaluation
For comparing the point clouds, an iterative approach
provided by the open-source Point Cloud Library
(PCL)
9
was used. Their Iterative Closest Point (ICP)
algorithm can be found at (ICP, ). For a comparison of
the point clouds, we used the fitness score value of the
algorithm which represents the mean of squared dis-
tances between the source and reference point cloud.
Then, we analyzed the following differences:
1. Distance of same object
2. Time
3. Objects
4. Noise of the virtual sensors
4.2.3 Results
For the first evaluation, we looked at the static noise
of the real sensor at defined distances using the pre-
viously mentioned objects. In order to do this, we
compared the five-point clouds of every distance with
each other and calculated the fitness score using ICP.
The resulting value is the mean squared distance for
the object at the same distance. We repeated the pro-
cess for every object at distances between 1m and 6 m.
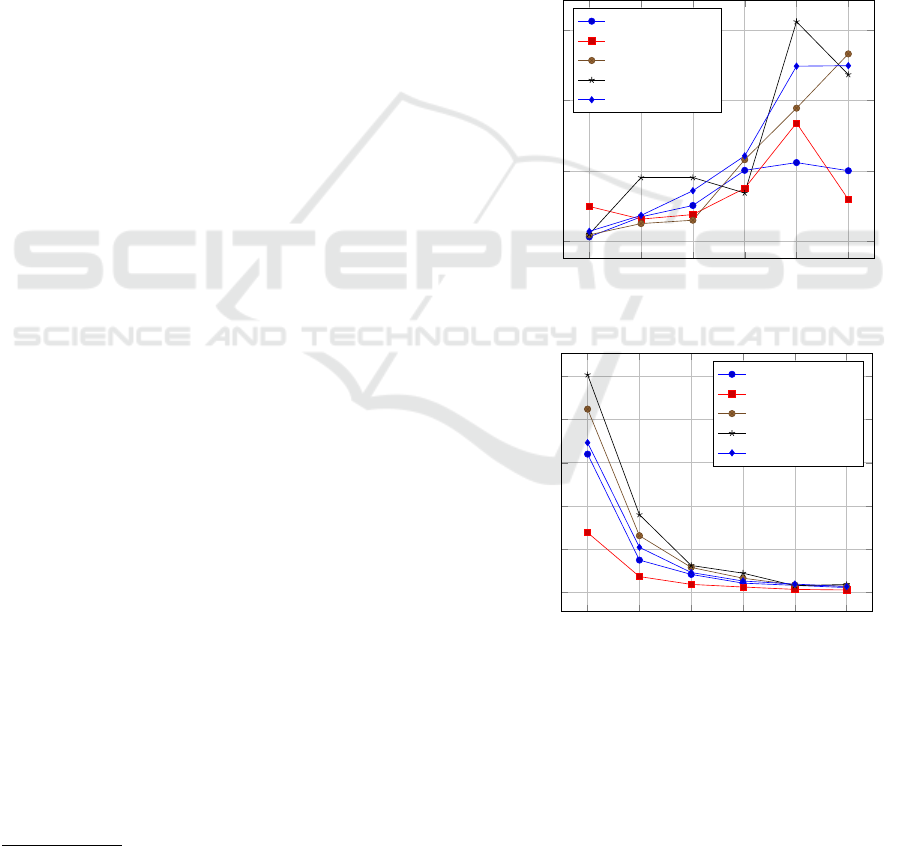
The two graphs in figure 10 show the evaluation
of these static aspects. The upper graph depicts the
mean fitness score value per distance for the different
objects. Below, the corresponding number of points
of the extracted point cloud can be seen. As expected,
the number of points decreases the further the object
8
https://www.blender.org
9
https://pointclouds.org/
is from the sensor. At 5 meters, all objects have ap-
proximately the same number of points. When ex-
amining the graph in figure 10a one notices that the
mean fitness score rises up to a certain point and then
decreases. One good example is the small box side
2. At 5 meters the mean fitness score is at its highest
and decreases by half for 6 meters. At first, that does
not make any sense, but when considering the lower
graph, one can see that at 6 meters the point cloud
consists of only a few points (around 6 to 10). When
looking at the recorded data, it is often the case that
the small box consists of only a single scan line. Thus,
the score value is smaller than expected because the
point clouds consist of a single line of a few points.
1 2 3 4
5 6
0
2
4
6
·10
−4
Distance
Mean fitness score
small box side 1
small box side 2
large box side 1
large box side 2
bin
(a) Mean score value the objects for different distances.
1 2 3 4
5 6
0
200
400
600
800
1,000
Distance[m]
Number of points
small box side 1
small box side 2
große box side 1
große box side 2
bin
(b) Mean number of points of the pointclouds for differ-
ent distances.
Figure 10: Evaluation of the real recorded point clouds. The
upper graph shows the mean fitness score for every object at
different distances, and the lower one the number of points
for the objects. Both distances are in meters.
For comparing the simulated point cloud with the
real recordings, we have to define a noise value based
on the simple model defined in 3 using centimeter as
SIMULTECH 2023 - 13th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
78
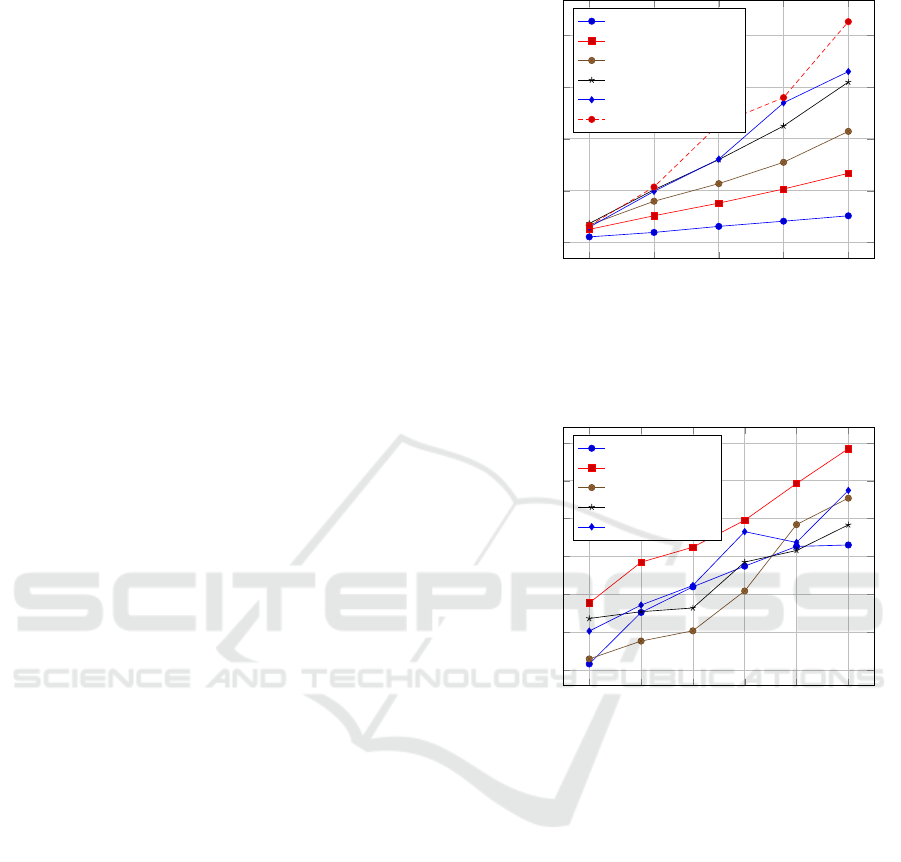
units. To do this, we compared the mean fitness score
of the small box using the ray tracing sensor with dif-
ferent noise values at different distances. The graph
in 11 shows the results. As expected, the mean fit-
ness score between consecutive scans of the same ob-
ject decreases with a higher noise value. This aspect
is intensified by the distance because the number of
points decreases the further the object is away from
the sensor which can be seen in graph (d) of figure 13.
Comparing those values with the real sensor record-
ings in figure 10 shows that the noise of it is neither
linear nor constant and we have to use different val-
ues for different distances. Having this in mind, we
increase the noise value by one centimeter for every
meter in distance for which the results of figure 11
roughly align with the real recordings in figure 10 for
the small box. In our tests, we focused on the ray-
tracing sensor since we expect that it returns the best
results in the scenario. Additionally, as explained in
subsection 3.2, small objects can not be detected by
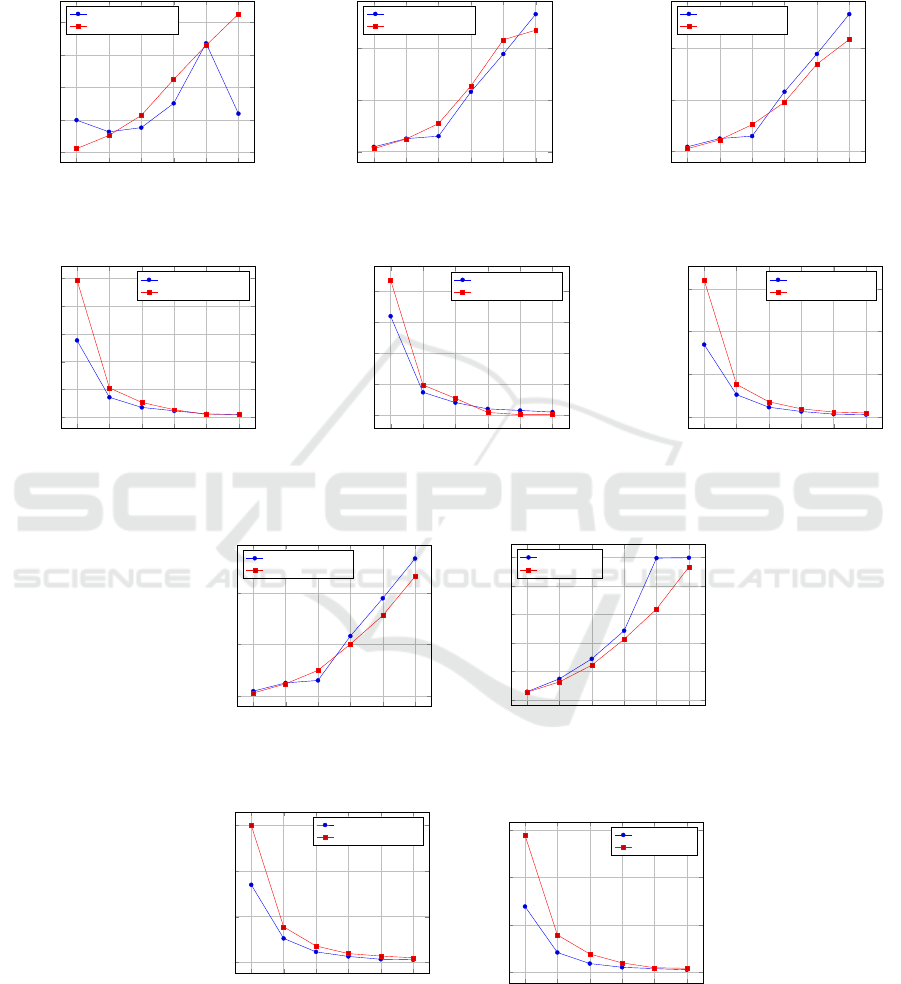
the particle sensor and the camera based sensor. Fig-
ure 13 shows the complete evaluation for all objects at
different distances using the ray tracing LiDAR sen-
sor and the noise model explained above. The similar-
ity in the virtual and real sensor is higher than initially
expected since our linear noise model is very simple
and does not account for effects like reflection. Nev-
ertheless, the curves match in basic shape and also
in the absolute values besides a few outliers. These
results, however, do not show the direct comparison
of the virtual pointcloud and the real one, they only
quantify the relative accuracy of the sensors and show
that our ray tracing LiDAR with corresponding pa-
rameters has similar properties to a real sensor.
Finally, we compared the pointclouds of the vir-
tual sensor to the real data. The results can be seen
in figure 12. Here, the mean fitness score between the
pointcloud of the real sensor and the ray tracing sen-
sor per object and distance can be seen. Note that the
scaling of the y axis is 10
−3
instead of 10
−4
which
was the value for the other graphs. It can be seen
that the graphs show a roughly linear behavior and
are constantly rising with some outliers. The fitness
score ranges between a few millimeters at 1 meter and
around twelve centimeters at 6 meters. The high fit-
ness score of the small box side 2 comes from an off-
set of the recorded object in the y axis of around 5
centimeter.
5 CONCLUSIONS
In subsection 3.1 we presented a system for adaptable
virtual sensors in Unreal Engine utilizing the adapter
1 2 3 4
5
0
1
2
3
4
·10
−4
Noise value[cm]
Mean fitness score
small box side 1 1m
small box side 1 2m
small box side 1 3m
small box side 1 4m
small box side 1 5m
small box side 1 6m
Figure 11: Mean fitness score value of the small box per
distance in the simulation using the ray tracing sensor using
different noise values. The noise values are in centimeter.
1 2 3 4
5 6
0
0.2
0.4
0.6
0.8
1
1.2
·10
−3
Distance[m]
Mean fitness score
small box side 1
small box side 2
bin
large box side 1
large box side 2
Figure 12: Comparison between the real sensor and the vir-
tual ray tracing based LiDAR sensor for the different objects
and different distances. The noise model assumes that for
every meter one centimeter of noise is added to the current
noise value.
pattern. Its benefits are easy integration of new sen-
sors as well as adaptable communication interfaces.
After that, we showed common LiDAR simulations
also introducing a new type of LiDAR simulation
method and showed that this approach is faster than
the current methods, but lacking behind in level of
detail. Although this method might be not applica-
ble for every use case, since e.g. the resolution is not
invariant to the position of the viewer, and the accu-
racy is worse than other methods, we are certain, that
the performance improvement (of ∼4x compared to
Ray Tracing) enables LiDAR sensors on much larger
scales. Lastly, we conducted experiments for com-
paring a common sensor implementation (ray-tracing
based) to a real sensor and evaluated the pointclouds
using the iterative closest points algorithm.
LiDAR-GEiL: LiDAR GPU Exploitation in Lightsimulations
79

5.1 Further Research
For further research, there are some aspects depend-
ing on the virtual sensor that can be improved. It is
possible to further improve the particle LiDAR ap-
proach using Hardware ray traces. Additionally, in-
stead of only considering the geometry of the scene,
we plan on developing a weighting of the sensor sig-
nals based on the material of the surface to account
for a more accurate physical model. This weighting
is predestined for the depth camera based approach
explained in subsection 4.1.2 since properties of ma-
terials can be accessed in the same way as the scene
depth in Unreal Engine. Another important aspect is
reflection, based on materials as well as the surface
normal. Here, the approaches vary based on the sen-
sor type, using ray-tracing it is easy to calculate re-
flections. For the depth based approach, only single
reflections can be calculated easily since Unreal En-
gine provides a normal map of the scene similar to the
scene depth and the material properties. For all sen-
sors more work has to be invested into the noise model
to reflect physical properties of a LiDAR sensor.
REFERENCES
Dosovitskiy, A., Ros, G., Codevilla, F., L
´
opez, A. M., and
Koltun, V. (2017). Carla: An open urban driving sim-
ulator. ArXiv, abs/1711.03938.
Fang, J., Yan, F., Zhao, T., Zhang, F., Zhou, D., Yang, R.,
Ma, Y., and Wang, L. (2018). Simulating lidar point
cloud for autonomous driving using real-world scenes
and traffic flows.
Hossny, M., Saleh, K., Attia, M., Abobakr, A., and Iskan-
der, J. (2020). Fast synthetic lidar rendering via spher-
ical uv unwrapping of equirectangular z-buffer im-
ages. ArXiv, abs/2006.04345.
Hurl, B., Czarnecki, K., and Waslander, S. L. (2019). Pre-
cise synthetic image and lidar (presil) dataset for au-
tonomous vehicle perception. 2019 IEEE Intelligent
Vehicles Symposium (IV), pages 2522–2529.
ICP. Website of pcl icp implementation. https://pointcloud
s.org/documentation/classpcl 1 1 iterative closest p
oint.html. Accessed at 13.02.2023.
Manivasagam, S., Wang, S., Wong, K., Zeng, W.,
Sazanovich, M., Tan, S., Yang, B., Ma, W.-C., and Ur-
tasun, R. (2020). Lidarsim: Realistic lidar simulation
by leveraging the real world. 2020 IEEE/CVF Con-
ference on Computer Vision and Pattern Recognition
(CVPR), pages 11164–11173.
Stachowiak, H. (1973). Allgemeine Modelltheorie. Springer
Verlag, Wien, New York.
Vierling, A., Sutjaritvorakul, T., and Berns, K. (2019).
Dataset generation using a simulated world. In Berns,
K. and G
¨
orges, D., editors, Advances in Service and
Industrial Robotics Proceedings of the 28th Interna-
tional Conference on Robotics in Alpe-Adria-Danube
Region (RAAD 2019), pages 505–513.
Wang, D., Watkins, C., and Xie, H. (2020). Mems mirrors
for lidar: A review. Micromachines, 11.
Wang, Y., Chao, W.-L., Garg, D., Hariharan, B., Camp-
bell, M. E., and Weinberger, K. Q. (2019). Pseudo-
lidar from visual depth estimation: Bridging the gap
in 3d object detection for autonomous driving. 2019
IEEE/CVF Conference on Computer Vision and Pat-
tern Recognition (CVPR), pages 8437–8445.
Wolf, P., Groll, T., Hemer, S., and Berns, K. (2020). Evo-
lution of robotic simulators: Using UE 4 to enable
real-world quality testing of complex autonomous
robots in unstructured environments. In Rango,
F. D.,
¨
Oren, T., and Obaidat, M., editors, Proceed-
ings of the 10th International Conference on Simula-
tion and Modeling Methodologies, Technologies and
Applications (SIMULTECH 2020), pages 271–278.
INSTICC, SCITEPRESS – Science and Technology
Publications, Lda. ISBN: 978-989-758-444-2, DOI
10.5220/0009911502710278, Best Poster Award.
SIMULTECH 2023 - 13th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
80
APPENDIX
Figures
1 2 3 4
5 6
0
1
2
3
4
·10
−4
Distance[m]
Mean Score value
small box real side 1
small box ray tracing
(a) Mean fitness score of the small
box side 1.
1 2 3 4
5 6
0
2
4
·10
−4
Distance[m]
Mean Score value
small box real side 2
small box ray tracing
(b) Mean fitness score of the small
box side 2.
1 2 3 4
5 6
0
2
4
·10
−4
Distance[m]
Mean Score value
large box real side 1
large box ray tracing
(c) Mean fitness score of the large box
side 1.
1 2 3 4
5 6
0
100
200
300
400
500
Distance[m]
Number of points
small box real
small box ray tracing
(d) Mean number of points for the
small box side 1.
1 2 3 4
5 6
0
200
400
600
800
Distance[m]
Number of points
small box real side 2
small box ray tracing
(e) Mean number of points for the
small box side 2.
1 2 3 4
5 6
0
500
1,000
1,500
Distance[m]
Number of points
large box real side 1
large box ray tracing
(f) Mean number of points for the
small box side 1.
1 2 3 4
5 6
0
2
4
·10
−4
Distance[m]
Mean Score value
large box real side 2
large box ray tracing
(g) Mean fitness score of the large box
side 2.
1 2 3 4
5 6
0
1
2
3
4
5
·10
−4
Distance[m]
Mean Score value
bin real
bin ray tracing
(h) Mean fitness score of the bin.
1 2 3 4
5 6
0
500
1,000
1,500
Distance[m]
Number of points
large box real side 2
large box ray tracing
(i) Mean number of points large box
side 2.
1 2 3 4
5 6
0
500
1,000
1,500
Distance[m]
Number of points
bin real
bin ray tracing
(j) Mean number of points of the bin.
Figure 13: Results for the ray tracing LiDAR sensor in the Unreal Engine with different objects. The upper graphs(a-c and
g-h) show the mean fitness score whereas the graphs below (d-f and i-j) shows the number of points for the object. Both, the
real data and the virtual data is shown.
LiDAR-GEiL: LiDAR GPU Exploitation in Lightsimulations
81
