
Doctrine-Based Multi-Resolution Conversion for Distributed
Agent-Based Simulations
Raul Ceretta Nunes
1 a
, Guilherme Miollo
1
, Edison Pignaton de Freitas
2 b
and Luis Alvaro Lima Silva
1 c
1
Graduate Program in Computer Science, Federal University of Santa Maria, Santa Maria, Brazil
2
Institute of Informatics, Federal University of Rio Grande do Sul, Porto Alegre, Brazil
Keywords:
Distributed Simulation, Simulation Integration, Multi-Resolution Simulation, Agent-Based Simulation.
Abstract:
The treatment of different levels of simulation detail is a relevant component for integrating simulators in var-
ious application domains. These levels vary in federated multi-resolution simulations, from low-information
(low-resolution) to high-information (high-resolution). One of the challenges in this integration is the repre-
sentation and conversion of simulation data exchanged between the simulators. This work explores the use
of doctrine-based rules in the conversion to ensure correct simulation integration. These rules contain infor-
mation on how the multi-resolution conversion handlers should operate. To avoid abrupt changes from one
doctrine rule to another, this work also extends a doctrine description language to capture information for the
smooth transition between these rules. Experimental results demonstrate that it is possible to achieve simula-
tions that flexibly deal with the required dynamism of a multi-resolution simulation environment.
1 INTRODUCTION
The interoperability between different resolution sim-
ulators is a fundamental issue for distributed simu-
lation applications. Such simulation systems’ inter-
operability is usually based on the exploration of the
High-Level Architecture (HLA) (IEEE, 2010), where
the integrated simulators are built to meet different
training objectives (Falcone et al., 2017). There are
simulators for operational training with high informa-
tion granularity models. For example, in (Zhou et al.,
2019), the goal is to allow trainees to perform detailed
operational activities in virtual environments. In con-
trast, simulation systems can focus on the execution
of more abstract simulation-based training activities
with low information granularity levels, such as the
ones required for strategic and tactical training. In
(Pozzer et al., 2022), for example, operational aspects
of the simulated problem are abstracted because they
have limited relevance for tactical and strategic train-
ing. The differences in these simulation goals most
often observed when simulation systems with differ-
ent resolution levels are used in the same integrated
a
https://orcid.org/0000-0003-3228-4071
b
https://orcid.org/0000-0003-4655-8889
c
https://orcid.org/0000-0002-6025-5270
simulation setup, each implemented according to dis-
tinct information levels of detail. The problem with
this approach is that simulated exercises involving
simulators with different resolution levels will likely
require customized integration and synchronization
methods, and the standard HLA architecture only su-
perficially/partially answers this problem.
The works presented in (Kong and Xing, 2013)
and (Tolk, 2012) investigate multi-resolution con-
version solutions where the proposals are indepen-
dent of the communication architecture in the dis-
tributed simulation. From (Kong and Xing, 2013), a
multi-resolution modeling can be built from a multi-
resolution entity (MRE) method that maintains run-
ning information of different resolution models. The
challenge of MRE is to maintain consistency of the
interaction with different resolution models. The
work in (Tolk, 2012) details a solution for multi-
resolution conversion where agent-oriented aggrega-
tion/disaggregation methods are investigated. The
authors in (Paul et al., 2017) also use aggrega-
tion/disaggregation methods but propose exploring
user-written doctrine rules to detail the required infor-
mation for multi-resolution conversions. These works
are based on multi-resolution conversion handlers,
which deal with the required conversion flexibility
for distributed simulation architectures. However, the
Nunes, R., Miollo, G., Pignaton de Freitas, E. and Silva, L.
Doctrine-Based Multi-Resolution Conversion for Distributed Agent-Based Simulations.
DOI: 10.5220/0012124700003546
In Proceedings of the 13th International Conference on Simulation and Modeling Methodologies, Technologies and Applications (SIMULTECH 2023), pages 377-384
ISBN: 978-989-758-668-2; ISSN: 2184-2841
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
377

literature still weakly addresses the dynamic multi-
resolution conversions and the consequent multi-
resolution mappings between low and high-resolution
multi-agent simulation systems (Macal, 2016).
The main contribution of this work is to pro-
pose a solution to multi-resolution conversion prob-
lems. This solution is based on doctrine rules
that specify how to make customized agent aggre-
gation/disaggregation conversions between low and
high-resolution agent-based simulators. These con-
verters receive low-granularity information from a
low-resolution level simulator (e.g., containing ag-
gregate units such as battalions) and convert them to
a high-granularity simulator (e.g., convert an aggre-
gate unit into its associated physical entities). This
work also proposes the exploration of dynamic multi-
resolution conversion handlers, providing a solution
to smooth the simulation changes between discrete
states, allowing these changes to be realistically de-
veloped in simulators with different resolution levels.
2 A DOCTRINE-BASED
MULTI-RESOLUTION
CONVERSION SOLUTION
The work in (Pozzer et al., 2022) presents a con-
crete instance of integrated multi-resolution simula-
tion. The SIS-ASTROS simulator develops a low-
resolution simulation for recognition, choice, and oc-
cupation of tactical battery positions to promote tacti-
cal training. These virtual tactical activities are simu-
lated in a high level of detail in this simulation system.
However, the SIS-ASTROS simulator is a compo-
nent of an Integrated Simulation System, where con-
structive, virtual tactical, and virtual technical (opera-
tional) simulators are interconnected to build a virtual
real-world setting for the augmented training of per-
sonnel with distinct military echelons.
A common simulation scenario in the proposed
SIS-ASTROS Integrated Simulation System occurs
when the constructive simulator, for higher military
echelons, controls agents inserted in the virtual tacti-
cal exercises. The multi-resolution conversion issues
appear because the simulated agents (or aggregates)
do not need to perform detailed tactical behaviors in
the constructive simulations. When converting the
simulation information from the constructive simula-
tor to the virtual tactical, the constructive view only
provides broad and discretized information to con-
trol the agents mapped in the other simulation sys-
tem. As the constructive simulator keeps the property
of these mapped agents, it cannot deal with the differ-
ent agent behaviors that occur when these entities fol-
low alternative simulation doctrines. These doctrines
guide the execution of the required agent behaviors
in the various tactical positions of the simulated exer-
cises. However, the agent’s doctrine behavior changes
throughout the simulations are important elements for
the fluency and realism of the more detailed virtual
tactical simulations.
The solution for distributed multi-resolution sim-
ulation proposed in this article considers that at least
two simulators are integrated, low and high-resolution
ones. Figure 1 shows that unit X is aggregated in
the low-resolution simulator. The division of unit X
into its individual elements is performed according
to the specified disaggregation rule. Unit X is de-
tailed as circularly dispersed Y entities on the high-
resolution simulator’s terrain. Figure 1 also shows
that the high-resolution simulator represents terrain
elements in higher levels of detail (e.g., various veg-
etation types). These elements are taken into account
at the time the disaggregation occurs.
Figure 1: The disaggregation of simulated units from the
low to the high-resolution simulator: the unity X is split
into several entities Y.
In addition to the terrain differences between the
involved simulators, the used military doctrines must
be respected during the resolution exchange. As
shown in Figure 1, the doctrine defines that the unit X
disaggregation corresponds to five entities Y. The doc-
trine also defines that a circular displacement should
be used when these Y entities are placed in the terrain
managed by the high-resolution simulator.
Even if the simulation information is exchanged
between simulators to ensure the correct resolution
conversion, the problem of integrating the simulators
when the simulation situation changes persist. In the
high-resolution simulator, the Y entities must mod-
ify the situation at the simulation run time if the unit
moves to a new area. This exchange also involves
SIMULTECH 2023 - 13th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
378

altering the doctrines that guide the simulation of Y
entities. Although this exchange of doctrines to guide
the Y entities’ behaviors in the high-resolution simu-
lator are relevant to produce faithful simulations, this
exchange of doctrines presents an irrelevant level of
detail to the low-resolution simulations.
An example of doctrine changes appearing in sim-
ulation exercises is presented in Figure 2, which
shows that Y entities in the high-resolution simula-
tor must move to goal A. As they are still under the
control of the low-resolution simulator, these enti-
ties must perform the navigation behavior actions re-
quired by the X unit in the low-resolution simula-
tor. To arrive at A, this unit follows a planned route
(dashed line in Figure 2). However, according to the
simulated doctrine in the low-resolution simulator, the
movement of Y entities must follow a convoy forma-
tion along the dotted line path in Figure 2. When they
arrive at goal A, their arrangement on that terrain lo-
cation can also differ from the one used in the tacti-
cal position initially occupied by these entities. The
result is the need to dynamically deal with the fol-
lowing simulation situation changes: the first occurs
when the simulated entities leave the current tactical
position, and the second when they arrive at a destina-
tion tactical position (goal A), in addition to executing
doctrine-based convoy movement behaviors.
In summary, multi-resolution conversion depends
on two issues: 1) the representation of additional in-
formation to regulate the simulation differences be-
tween the low- and high-resolution simulators; and 2)
the mapping of simulation changes that occur at sim-
ulation run-time. This work proposes an XML-based
representation language to express doctrine rules for
mapping low and high-resolution distributed simula-
tions to approach the first issue. It relies on dynamic
multi-resolution conversion handlers to manage the
simulation changes of the integrated agents to ap-
proach the second issue. Therefore, the research re-
lies on the representation of doctrine rules to better
specify multi-resolution conversions.
2.1 Multi-Resolution
Aggregation/Disaggregation
Conversion Rules
The multi-resolution conversion solution adopted in
this work is based on previous advances found in the
literature (Li et al., 2008) and (Paul et al., 2017). It ex-
plores the representation and computation of doctrine
rules to guide the distributed simulations. The pro-
posed solution extends the expressiveness of the doc-
trine rule description language detailed in (Paul et al.,
2017). The multi-resolution doctrine rules aim to pro-
Figure 2: Low and high-resolution simulators showing dif-
ferent views of a simulated agent movement situation.
vide the information necessary for the high-resolution
simulator to faithfully simulate real-world agent be-
haviors, where the simulated entities and their simu-
lated behaviors are controlled by the low-resolution
simulator. Although the low-resolution simulator
owns these agents, and this ownership remains so
during the course of the integrated simulations, these
agents make a fundamental part of the simulations ex-
ecuted by the high-resolution simulator.
When implementing a new multi-resolution doc-
trine rule language, rule modeling concepts must be
defined. In our work, these concepts were motivated
by a case study developed in the SIS-ASTROS GMF
project (Pozzer et al., 2022). One of the aims of this
project is to integrate a high-resolution virtual tacti-
cal simulator with a constructive simulator while ex-
ecuting distributed simulation exercises. The inte-
gration rules rely on defining these domain concepts
to detail different simulation situations. In this case
study, the main attributes for specifying the multi-
resolution conversion rules are the following: Object
identification; Unity composition; Simulation situa-
tion; Formation organization; Agent position; Dis-
tance between agents; Distance between agents and
terrain features; Central agent; and Agent orientation.
DoctrineRules: Fig. 3 shows that DoctrineRules is
the root concept in the rule specification model. This
concept is detailed by Entities and Units, organizing
these elements in the doctrine rule representation.
Entities: Figure 4 shows that Entities are composed
of one or more Entity elements. The attributes of
these concepts are:
• name: identifies the simulated object;
Doctrine-Based Multi-Resolution Conversion for Distributed Agent-Based Simulations
379
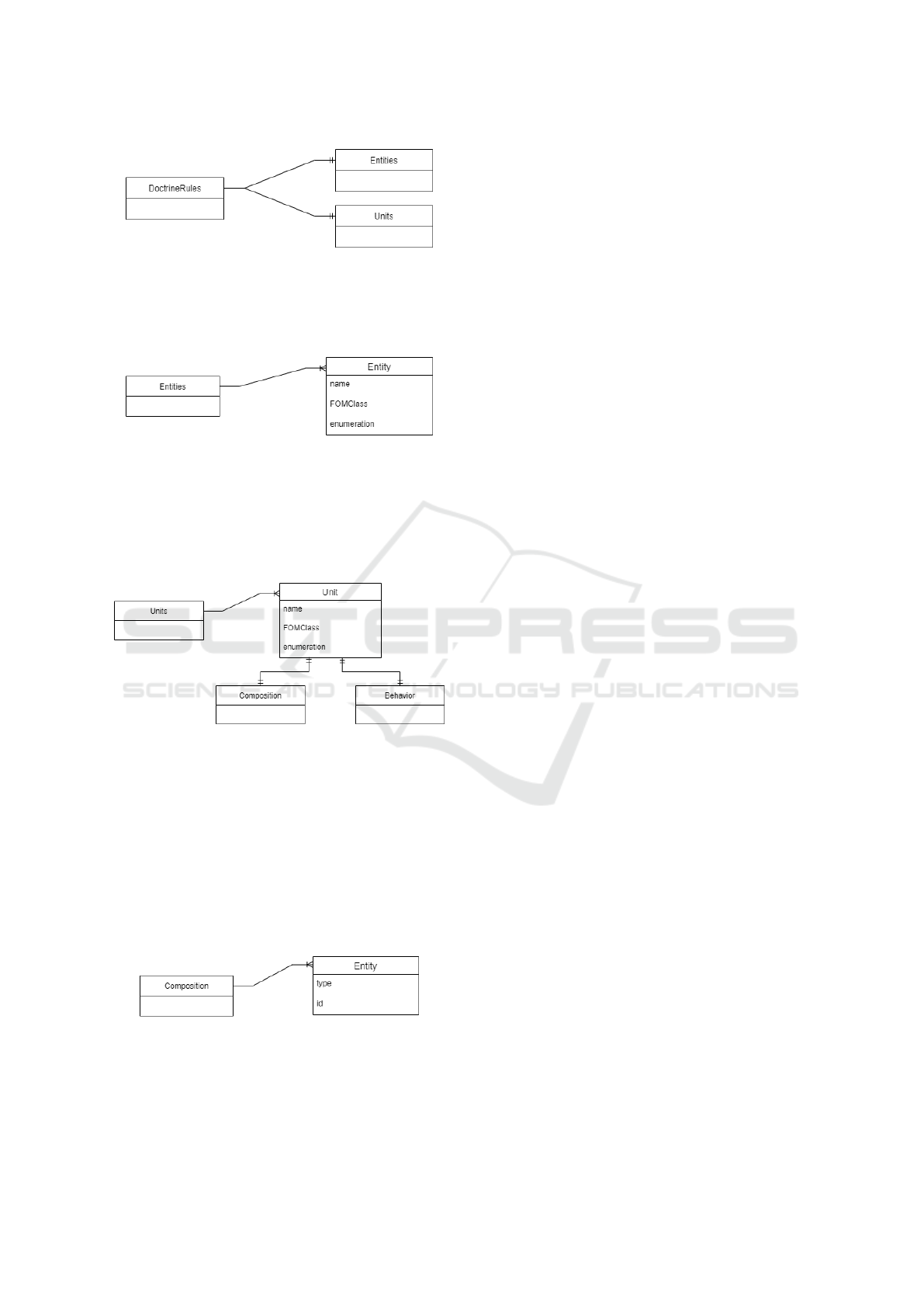
Figure 3: The representation of doctrine rules.
• FOMClass: describes the object type;
• enumeration: a unique numerical attribute for rep-
resenting the simulated doctrines.
Figure 4: The Entity concept and its attributes.
Units: Figure 5 shows that the Units concept con-
sists of one or more Unit elements. Each Unit is mod-
eled by Composition and Behavior elements. The
Unit attributes are the same of the Entity whenever
the object is an entity and has the same purpose.
Figure 5: The Units concept, its subconcepts and attributes.
Composition: Figure 6 shows that the Composi-
tion concept indicates which entities, among those de-
clared, are part of a Unit. It consists of one or more
Entity elements. Its attributes are:
• type: identifies the entity type; it should corre-
spond to a previous defined name of an Entity;
• id: a unique numerical ID attribute identifying an
Entity of a Unit. When multiple entity types exist,
this attribute distinguishes them.
Figure 6: The Composition concept, its subconcepts.
Behavior: The Behavior concept indicates how
units should behave in each simulated doctrine. This
concept consists of one or more Situation elements
and assumes an entity corresponds to a simulation
agent. Its attributes are:
• name: identifies the doctrine situation;
• formation: formation organization adopted by the
Entities of a Unit in the simulated situation;
• entityDist: if necessary, indicates the distance be-
tween entities in the simulated situation;
• terrainFeatureDist: indicates the distance the enti-
ties should keep from the terrain features observed
in the simulated situation;
• entityRef: indicates the coordinate of the refer-
ence entity, which is used as reference for or-
ganizing other entities in the simulated terrain.
This reference should be the related Unit on low-
resolution simulator.
The Entity concept associated with the Situation con-
cept is used to describe information that is specific
to the entity within the simulated situation. The at-
tributes that describe these concepts are:
• id: a unique numerical attribute identifying an En-
tity in the simulated situation. This numerical id is
related to elements of the Composition concepts;
• position: indicated the terrain position the Entity
is located in the simulated situation (and the ter-
rain formation organization adopted by them);
• orientation: if necessary, it indicates the agent ori-
entation in the simulated situation, e.g., North,
South, etc.
2.2 The Representation of Dynamic
Multi-Resolution Conversion Rules
The dynamic multi-resolution conversion rules are
related to agent behavior changes occurring at simu-
lation run-time. The dynamism concerns the smooth-
ing that must occur whenever the doctrine rules guid-
ing the agents’ simulations change. To approach this
problem, this work proposes determining situation
change zones to address these events. When instan-
tiating these zones in a simulated terrain, the deter-
mined zones indicate the areas where the simulated
entity behaviors change from one doctrine to another.
In this doctrine-based multi-resolution conversion
solution the situation change zones correspond to
doctrine transition zones that are theoretical areas
mapped into the simulated terrain at the simulation
run-time. Figure 7 illustrates this zone from a park-
ing situation to a movement situation in response to a
movement order. When low and high-resolution sim-
ulators are integrated, these zones are created when-
ever agent movement orders are issued in the low-
SIMULTECH 2023 - 13th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
380

resolution simulator. When this order is executed, the
agent moves from one terrain location to another.
Figure 7: A situation change zone where occur a parking to
movement doctrine transition.
Fig. 8 illustrates a unit movement in a simulation
in response to a movement order in the low-resolution
simulator. When the movement command is emitted,
the first terrain zone is automatically determined in
the high-resolution simulator. In the start zone, the
disaggregated entities are under the doctrine rule be-
havior that must be used in that simulated tactical po-
sition (parking). When moving to leave this position,
the unit executes a dynamic convoy movement behav-
ior to change from parking to movement doctrine rule
behavior. Consequently, the agents start following a
different doctrine rule, a doctrine transition rule that
activates an autonomous behavior. In the end zone,
a similar behavior appears. The entities must change
the executed doctrine rule (movement to parking).
With the definition of the simulation situation
transition zones mapped to the simulated terrain, the
proposed dynamic multi-resolution conversion fol-
lows the activities presented in Figure 9. Notice that
the high-resolution simulator is responsible for exe-
cuting the movement behaviors of the simulated unit.
The low-resolution simulator controls the agents’
movement positions in this distributed simulation sce-
nario. When the unit moves in the low-resolution
simulator, all entities mapped into the high-resolution
simulator must move too. The low-resolution simu-
lator also determines the target position. Thus, the
Figure 8: Start and end movement zones determination and
their corresponding behaviors.
unit’s movement should be mapped from the low to
the high-resolution simulator. To approach this prob-
lem, the units’ terrain coordinates are continuously
updated and mapped from one simulator to another.
According to the doctrine rules used by the high-
resolution simulator, the unit terrain coordinates are
used to determine whether any of the simulated units
entered a situation transition zone.
The low- and high-resolution simulator agent
movement algorithms are executed when agents are
within the simulation situation change zone. How-
ever, they cooperate to achieve the required realistic
movement behavior in the high-resolution simulator.
Then the multi-resolution doctrine conversion rules
proposed in this work detail which terrain positions
the units should be. When the simulated units en-
ter the change zone determined in the simulated ter-
rain, a doctrine rule relevant to that simulation situ-
ation change is selected, determining the new simu-
lated doctrine these agents should start executing.
3 A CASE STUDY
A case study was developed to assess the flexibility
and dynamism of the proposed multi-resolution con-
version solution. This case study involves integrating
simulated exercises developed in two distinct simu-
lators: a low and a high-resolution simulator. Impor-
tantly, the low-resolution simulator contains a simula-
tion scenario that should be realistically mapped into
the high-resolution simulator. To do so, implemen-
tations of multi-resolution conversion handlers are
used so that agents’ aggregations are converted (via
the RTI structure) from the low- to the high-resolution
simulator, reaching the high-resolution simulator in a
proper doctrine-based disaggregated format.
In the developed case study, the low-resolution
simulator contains an aggregation of vehicles com-
prising a military battery. This aggregation in-
volves multiple instances of three types of elements
(i.e., military vehicles) named in this case study as
Unid1, Unid2, and Unid3. Unlike the low-resolution
simulator, the high-resolution one must simulate
these entities individually. The implemented multi-
resolution conversion handlers execute the specified
multi-resolution doctrine rules to properly split the
aggregated objects into their individual components.
When the units are disaggregated and represented
in the high-resolution simulator, they must occupy the
same tactical position as in the low-resolution simu-
lated terrain. In this tactical position, agents must be
displaced in the terrain according to a particular static
formation organization detailed by the military doc-
Doctrine-Based Multi-Resolution Conversion for Distributed Agent-Based Simulations
381
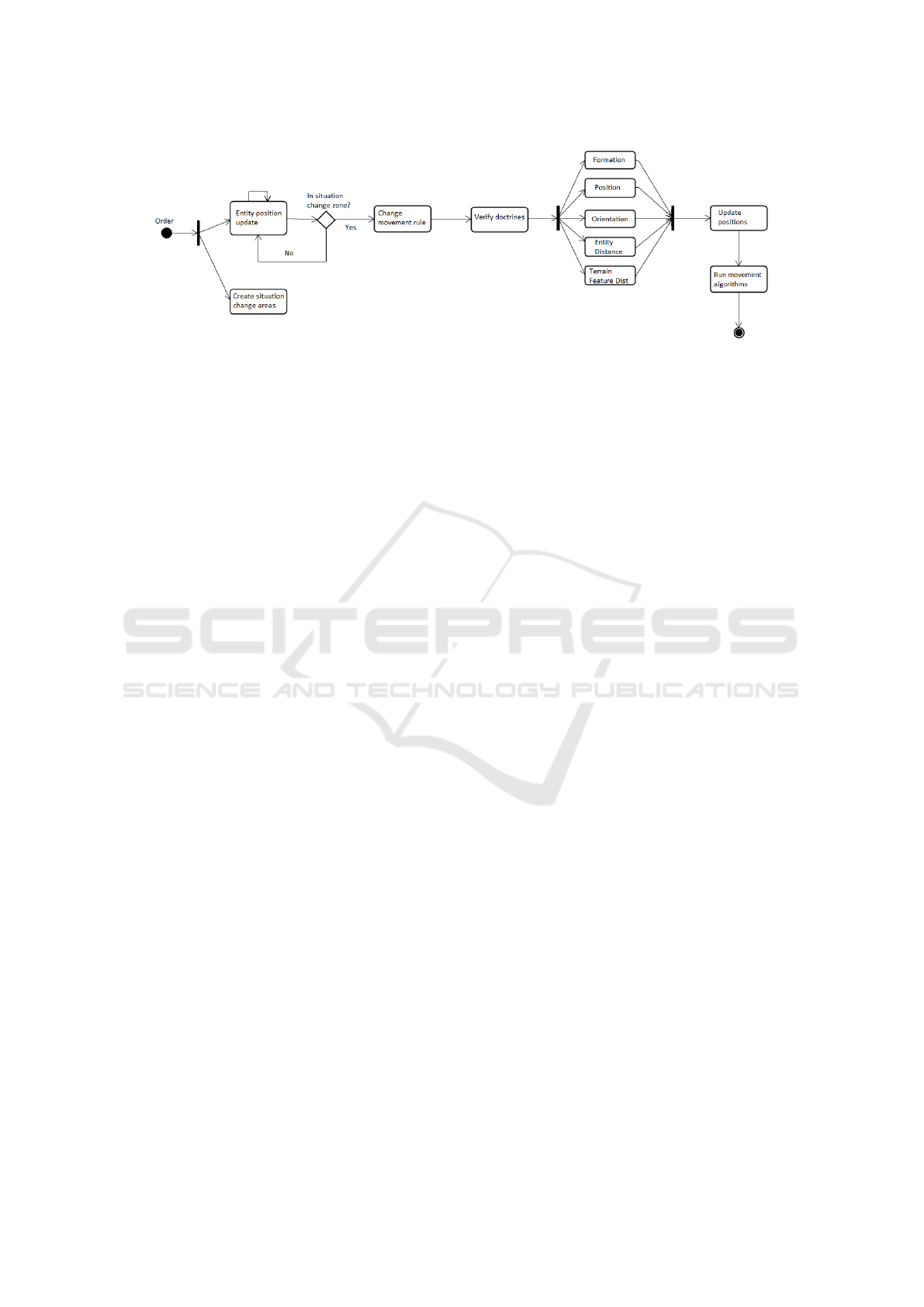
Figure 9: Activity diagram explored dynamic multi-resolution conversion handlers.
trine. Therefore, the different disaggregated units in-
volved in this case study, named U1EntA, U1EntB,
U1EntC, U2EntA, U2EntB, and U3EntA, are posi-
tioned on the simulated terrain accordingly.
When agents’ aggregations receive a command
to occupy a new tactical position at run-time, these
agents must perform a doctrine-based motion behav-
ior. The transition from a static position occupation
doctrine to a dynamic movement one is simplified
in the low-resolution simulator. This simulator just
needs to simulate an aggregate of agents (i.e. the
whole battery) moving from one place to another. In
this simulation level, the movement details of each
unit in the aggregated entity are irrelevant.
As the low-resolution simulator controls the ag-
gregate entity, the problem is that the transition be-
tween these static and dynamic doctrines must oc-
cur in an organized and realistic manner in the
high-resolution simulator. So the proposed multi-
resolution conversion handler should detail how to
smoothly move between these doctrines while map-
ping these aggregate entities into individual units in
the high-resolution simulation.
3.1 The Multi-Resolution
Aggregation/Disaggregation
Conversion
All the multi-resolution doctrine rules are checked
during the simulation exercise’s representation. Ini-
tially, declarations of the involved simulation entities
and units are analyzed.
We highlight the doctrine rules’ modeling allows
unique identifiers for each entity within the simulated
situations. It also allows handling doctrine rules indi-
vidually. The optional attributes added in the multi-
resolution doctrine rule representation favor captur-
ing the specifics of simulated agent behaviors. The
following attributes present examples of these simu-
lation situations:
• entityDist: determines the distance between the
vehicles in a convoy movement formation.
• terrainFeatureDist: determines the distance con-
voy vehicles must keep from obstacles and other
simulated terrain features;
• entityRef: describes a central agent (e.g., a com-
mand vehicle) used by simulated doctrines, which
are static and dynamic agent organizations involv-
ing a central element;
• orientation: determines the geographic direction
in which the simulated agents are presented in 3D
terrain scenarios.
The proposed multi-resolution doctrine rules repre-
sent the simulation information using the XML lan-
guage. Starting from the proposals presented in (Paul
et al., 2017), the XML representation allows multi-
resolution conversion handlers to better process the
data required to process the multi-resolution doctrine
rules. As experienced in our project, such XML for-
mat is simple to understand, favoring the doctrine
rules’ modeling, revision, and updating.
3.2 The Dynamic Multi-Resolution
Conversion
In the developed case study, the integration of simu-
lators was tested with and without the use of dynamic
multi-resolution conversion implementations. These
handlers map run-time simulation situations, where
agent behavior information is mapped from the low
to the high-resolution simulator.
The dynamic multi-resolution conversion is
based on the following simulation information: the
convoy formation organization must be adopted by
the simulated agents; there is a simulation command
indicating the agents should act in such a way in the
simulations; the agents are geographically oriented in
the simulated terrain; the agents must consider the ter-
rain elements when executing the simulated doctrine
rules; and the agents must keep minimum and maxi-
mum distances between them.
SIMULTECH 2023 - 13th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
382

In the performed implementations, an Integration
module is used in the our case study. This module
uses a target coordinate, received from low-resolution
simulator via HLA, and calculates the movement pa-
rameters required by the agents of high-resolution
simulator. These parameters are stored in the Vehicle-
Behaviour handler, responsible for moving the agent
in the simulated environment. These parameters are
called steeringParameters (implemented as Steering
Behavior algorithms (Reynolds et al., 1999)). They
are necessary for the agent to transit through the sim-
ulated terrain to destinations avoiding collisions with
static and dynamic obstacles. The algorithm for mov-
ing agents in the high-resolution simulator is called
VehicleBehaviour. The setup parameters for these
modules are the following:
• Move defines whether the agent should move. If
false, the agent stops the movement;
• MoveForward defines whether the agent moves
forward or backward;
• DesiredSpeed required movement speed in km/h.
• SteeringCoefficient defined the movement direc-
tion, varying from -1 to 1. Negative values make
the agent turn left, and positives right. If the value
is zero, the agent moves in a straight line.
An usual example of a dynamic simulation situation
occurs when the aggregated Unid1 has to move from
one tactical position to another. The Unid1 vehicles
are in a marching column formation to simulate the
desired doctrine movement behavior. When the vehi-
cles reach the destination, they occupy the new tac-
tical position accordingly. It means these simulated
vehicles are displaced in another terrain formation, a
ready line (side-by-side) formation.
This simulation scenario can be detailed in five-
time frames (i.e., simulation states). First, the Unid1
vehicles are out of a situation change zone and mov-
ing to it according a doctrine rule that specify column
formation. Second, the Unid1 vehicles arrive in the
situation change zone and getting in it. Third, the ve-
hicles are inside the situation change zone and move
in it. Fourth, the Unid1 vehicles arrive at the situation
change zone border and cross it. Finally, the Unid1
vehicles arrive a new tactical position where the for-
mation doctrine rule specifies an in line formation
(side-by-side). As presented by the high-resolution
simulator, Figure 10 details how these simulated ve-
hicles (agents) behaviors can be mapped from the low
to the high-resolution simulation scenario.
Fig. 10(a) presents a 2D projection of the high-
resolution simulator without executing this dynamic
multi-resolution conversion. Fig. 10(b) presents the
same simulation situation where the high-resolution
simulator uses the simulation information received
from the dynamic multi-resolution conversions.
The four agents are organized in a linear forma-
tion in the first simulation time step. They are moving
toward a simulation situation change zone. There is
no difference between the simulated scenarios with
and without the dynamic simulation treatment in this
simulation period of time. The agents adopt a new
formation organization in the second simulation time
step. However, there is a gradual transition from one
formation organization to another, controlled by the
dynamic multi-resolution handlers. It is possible to
observe the agents continue to move in the same ways
when the dynamic simulation conversion is not ex-
ecuting. It means they do not change the doctrine
movement behavior they are executing. The agents
almost reach their destination positions in the third
simulation time step. These positions are located in-
side the tactical position they should occupy. When
the dynamic simulation treatment is not explored, the
simulated agents keep the same movement behavior
even when they almost reach their destination. In the
fourth (and first) simulation time steps, the simulated
scenarios with and without dynamic multi-resolution
simulation handlers are identical in low and high-
resolution simulators. However, there is a smoother
and more realistic transition in the executed agents’
navigation behaviors with the execution of the pro-
posed dynamic multi-resolution handlers.
4 FINAL REMARKS
This work proposes a doctrine-based approach to
solve the multi-resolution conversion problem in dis-
tributed simulation systems. To integrate simulators
with different resolution levels, the proposed doc-
trine rule-based solution allows the representation of
a greater variety of scenarios in which the transition
between different simulators is required. This allows
the representation of more specific simulation situa-
tions involving the transition of military doctrines into
simulated terrain situations with different levels of de-
tail in each integrated simulator. The multi-resolution
solution proposed in this work allows more realistic
integrated simulations, further increasing the role of
doctrine-based rules in providing precise simulation
data for resolution conversions. Directions for future
work are focused on enhancing doctrine-based inte-
gration and, consequently, producing smoother and
more realistic integrated simulations.
Doctrine-Based Multi-Resolution Conversion for Distributed Agent-Based Simulations
383

(a) High-resolution simulator where the dynamic multi-resolution conversion is not executed.
(b) High-resolution simulator where the dynamic multi-resolution conversion is executed.
Figure 10: The dynamic multi-resolution conversion between simulators.
ACKNOWLEDGEMENTS
We thank the Brazilian Army (Strategic Program
ASTROS) for financial support through the SIS-
ASTROS GMF project (TED 20-EME-003-00).
REFERENCES
Falcone, A., Garro, A., Anagnostou, A., and Taylor, S. J. E.
(2017). An introduction to developing federations
with the high level architecture (hla). In 2017 Win-
ter Simulation Conference (WSC), pages 617–631.
IEEE (2010). Ieee standard for modeling and simulation
(m&s) high level architecture (hla)– federate inter-
face specification. IEEE Std 1516.1-2010 (Revision
of IEEE Std 1516.1-2000), pages 1–378.
Kong, Y. and Xing, L. (2013). Study of multi-resolution
modelling framework in joint operations simulation.
Proceedings of the 2013 International Conference
on Information Tecnology and Computer Application
Engineering (ITCAE 2013).
Li, M., Bi, C., Liu, X., and Niu, D. (2008). Research on
rules of aggregation and disaggregation for aircraft en-
tity models in air force combat simulation. In 2008
Asia Simulation Conference - 7th International Con-
ference on System Simulation and Scientific Comput-
ing, pages 1286–1290. IEEE.
Macal, C. (2016). Everything you need to know about
agent-based modelling and simulation. Journal of
Simulation, 10:144–156.
Paul, R. L., Nunes, R. C., Oliveira, V. D., and Kunde,
D. (2017). Doctrine based multi-resolution hla dis-
tributed simulation. Proceedings of the Symposium on
Applied Computing, pages 59–64.
Pozzer, C., Martins, J., Fontoura, L., Silva, L., Rutzig, M.,
Nunes, R., and Pignaton de Freitas, E. (2022). Sis-
astros: An integrated simulation system for the ar-
tillery saturation rocket system (astros). In 12th In-
ternational Conference on Simulation and Modeling
Methodologies, Technologies and Applications (SI-
MULTECH 2022), pages 194–201. SCITEPRESS –
Science and Technology Publications, Lda.
Reynolds, C. W. et al. (1999). Steering behaviors for au-
tonomous characters. In Game developers conference,
volume 1999, pages 763–782. Citeseer.
Tolk, A. (2012). Engineering principles of combat model-
ing and distributed simulation. Wiley.
Zhou, L., Mao, Z., Jing, F., Chen, Y., Gao, M., Wang, J.,
and Liu, Z. (2019). Design of satellite communica-
tion simulation training system based on hla, vr and
opnet. In 2019 International Conference on Robots &
Intelligent System (ICRIS), pages 125–128.
SIMULTECH 2023 - 13th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
384
