
Learning Heuristics for Topographic Path Planning in Agent-Based
Simulations
Henrique L. Krever
1 a
, Thiago R. S. Le
˜
ao
1 b
, Juliano M. Pasa
1 c
, Edison P. de Freitas
2 d
,
Raul C. Nunes
1 e
and Luis A. L. Silva
1 f
1
Graduate Program in Computer Science, Federal University of Santa Maria, Av. Roraima nº 1000,
97105-900, Santa Maria, Brazil
2
Graduate Program in Computer Science, Federal University of Rio Grande do Sul,
CP 15064, 91501-970, Porto Alegre, Brazil
Keywords:
Topographic Path Planning, Heuristic Learning, Deep Neural Networks, Agent-Based Simulations.
Abstract:
Path planning algorithms with Deep Neural Networks (DNN) are fundamental to Agent-Based Modeling and
Simulation (ABMS). Pathfinding algorithms use various heuristic functions while searching for a route with
a low cost according to different criteria. When such algorithms are applied to compute agent routes in
simulated terrain maps represented by large numbers of nodes and where topographic movement constraints
are present, the problem is that traditional heuristic functions lose quality since they do not capture important
characteristics for target simulation problems. To approach this issue, this work investigates the training of
DNNs with large numbers of (i) topographic path costs and (ii) correction factors for standard Euclidean
distance heuristic estimations. The aim is to use these DNNs as heuristic functions to guide the execution of
different A
∗
-based topographic path planning algorithms in agent-based simulations. The work approaches
the heuristic learning and computation of agent routes in topographic terrain maps of different natures. To
assess the performance of the proposed techniques, experimental results with path planning algorithms and
alternative topographic maps are analyzed according to statistical models.
1 INTRODUCTION
Deep Neural Networks (DNN) (Goodfellow et al.,
2016) are crucial to the resolution of several path
search problems of Agent-Based Modeling and Simu-
lation (ABMS) (Macal, 2016). Various challenges re-
lated to the computation of path planning algorithms
with different natures, the use of terrain map repre-
sentation and indexing structures, the exploration of
pre-processed terrain map and path information, the
search for better heuristic functions, and the consid-
eration of different types and numbers of agents are
investigated in the path planning literature (Abd Al-
gfoor et al., 2015). With the exploration of DNNs,
these issues also have an important role in planning
relief-aware movement behaviors for agents in simu-
a
https://orcid.org/0000-0002-5791-5557
b
https://orcid.org/0000-0002-6137-2751
c
https://orcid.org/0000-0003-0319-7817
d
https://orcid.org/0000-0003-4655-8889
e
https://orcid.org/0000-0003-3228-4071
f
https://orcid.org/0000-0002-6025-5270
lated virtual environments.
Heuristic path planning algorithms search for
the path with the lowest cost according to different
characteristics of the simulated application problem,
where different types of heuristic functions are used
to guide the search process. The key role of these
functions is to estimate the distance from a current po-
sition n to a goal position g. In the A
∗
-based pathfind-
ing algorithms, the cost of each node n is determined
by the function f (n) = g(n)+ h(n), where g(n) is the
current path cost, h(n) is the heuristic function to esti-
mate the distance between the current and goal nodes.
The quality of a heuristic estimation is related to
the form in that the function approaches the actual dis-
tance to the goal, directly influencing the choice of
terrain map nodes analyzed during the path search.
Traditional heuristic functions (e.g., Euclidean dis-
tance) adequately guide the search for agent routes
in many simulated maps that do not have many obsta-
cles or other terrain movement constraints. The prob-
lem is that standard heuristic functions become inef-
fective when the pathfinding algorithms have to com-
Krever, H., LeÃ
ˇ
co, T., Pasa, J., P. de Freitas, E., Nunes, R. and Silva, L.
Learning Heuristics for Topographic Path Planning in Agent-Based Simulations.
DOI: 10.5220/0012129900003546
In Proceedings of the 13th International Conference on Simulation and Modeling Methodologies, Technologies and Applications (SIMULTECH 2023), pages 115-125
ISBN: 978-989-758-668-2; ISSN: 2184-2841
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
115

pute realist routes for agents in terrains with varied to-
pographic characteristics. Moreover, many complex
search problems can rely on heuristics that compute
suboptimal solutions for many reasons (e.g., (Spies
et al., 2019), where computing better quality agent
routes has a fundamental role in maintaining the real-
ism and fluency of the many virtual simulations.
Recent works (Takahashi et al., 2019) (Jindal
et al., 2017) (Wang et al., 2019) (Ariki and Narihira,
2019) (Li et al., 2016) (Kirilenko et al., 2022) (Neisse
et al., 2022) (Weber et al., 2022) investigate the ex-
ploration of DNNs as heuristic functions for the res-
olution of path planning problems in different appli-
cations. Although relevant proposals have been pre-
sented, exploring DNN in pathfinding for ABMS ap-
plications is not a mature research field. To approach
this issue, this work investigates the computation of
paths in terrain maps with different relief character-
istics (Ganganath et al., 2014) (Chen et al., 2009)
(Chagas et al., 2022), permitting the evaluation of the
effectiveness of alternative path planning approaches
based on the DNN-based learning of heuristic func-
tions.
The pathfinding algorithm’s heuristic functions
guide the map node analysis during the path search
in simulated topographic terrain maps. Therefore, the
more the DNN-based heuristic function approximates
the shortest distance between two terrain map nodes,
the fewer nodes need to be analyzed by the pathfind-
ing algorithm. Most importantly, these functions can
learn the topographic characteristics of a set of simu-
lated terrain maps to better estimate relief-aware dis-
tances between start and destination positions. This
work details a DNN architecture and how to prepare
the path information to train it so that the DNN learns
the heuristic function to be used by topographic path
planning algorithms. Experimental results presented
in this work are computed using two distinct A
∗
-based
pathfinding algorithms, where alternative forms of
training and using the DNNs in the heuristic compu-
tations are investigated. This work assesses the pro-
posed approach in terms of the number of expanded
nodes, execution time, and path cost (distance). The
various pathfinding results computed in different ter-
rain maps are also statistically analyzed.
The work is organized as follows: Section II starts
reviewing pathfinding techniques. Then it discusses
approaches for topographic path planning and the ex-
ploration of DNNs as heuristic functions for pathfind-
ing; Section III details the DNN-based topographic
pathfinding approaches investigated in this work; Sec-
tion IV details how the proposed techniques were ex-
perimentally analyzed. Then it discusses the obtained
testing results; Section V presents final remarks and
directions for future work.
2 BACKGROUND AND RELATED
WORK
Path planning algorithms (Abd Algfoor et al., 2015)
are based on alternative criteria to find a route for
agents to move in a virtual terrain map. For this,
a movement cost value should be considered from
the different topographic characteristics of a terrain
map. These cost computations can involve charac-
teristics such as path distance, travel time, agent en-
ergy required for the movement, travel limitations re-
lated to the agent’s physical capacities, logistic agent
issues, and many other application-oriented factors.
Although this work focuses on the computation of
paths for agents to better move through the terrain re-
lief, it actually aims to investigate how to learn char-
acteristics like these in DNNs so that they are not
lost/underused in heuristic path search computations.
Path search algorithms can work with or without
heuristic functions composing the travel cost com-
putations. A heuristic estimates the cost between
any node and a destination on the map representa-
tion structure, being zero when applied to the destina-
tion. This estimate assists the pathfinding algorithm
in choosing the next node to be analyzed during the
search, indicating the most promising map node in re-
lation to finding a path that leads to the destination.
Dijkstra’s algorithm (Frana and Misa, 2010) does
not use such a heuristic function. However, it is usu-
ally a first choice in developing many simulation sys-
tems because it has a straightforward implementation,
good performance level, and calculation of the mini-
mum path cost between nodes representing the virtual
terrain map. The A
∗
algorithm (Hart et al., 1968) and
others derived from it differ from Dijkstra in using a
heuristic function for prioritizing the choice of nodes
that should be better than others during the search.
With this, the A
∗
-family of algorithms significantly
reduces the processing time of the path search.
The Bi-Directional A
∗
algorithm (BiA
∗
) (Pohl,
1971) is a version of graph search algorithms that, us-
ing a heuristic, does the search from the start node
towards the destination node, while simultaneously
searching from the destination node towards the start
node. The path is returned when one of these searches
finds a node opened by the other search. Because of
that, the algorithm sometimes ends up finding subop-
timal paths, as it can finish the execution without hav-
ing examined less costly nodes. That is not a problem
for many simulation applications since these subopti-
mal paths are much more efficiently computed, where
SIMULTECH 2023 - 13th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
116

memory and processing time constraints have to be
considered in many agent-based simulations.
2.1 Related Works
First, this work approaches the computing of agent
routes in terrain maps with topographic characteris-
tics.
The authors of (Ganganath et al., 2014) formu-
lated a heuristic for movements with lower energy
costs for mobile robots on terrain with elevation, us-
ing an A
∗
-based algorithm. A graph was used to ab-
stract a Digital Elevation Model (DEM) of a small
area of 1 km
2
of a region of canyons. Each graph
vertex represents a terrain point and has 8 edges for
its neighbors. The terrain points have three coordi-
nates, two for the position and one for the elevation.
The tangent arc of the inclination between coordi-
nates gives the inclination angle between two terrain
points. This angle is used in formulating the energy
cost model for traversing graph vertices and the algo-
rithm’s heuristic.
The work in (Chen et al., 2009) presents a path-
planning algorithm for 3D game scenes. The scene is
represented by a graph, where the vertices represent
the polygons and the edges represent the polygons’
adjacencies used in the scene rendering. The heuris-
tic used by the search algorithm uses the Euclidean
distance between nodes of the terrain representation
structure. The terrain inclination information, rep-
resented by normal vectors, is used in the function
(o,n), where a linear combination of these vectors
represents the difficulty of moving between the nodes
o and n. A graph is used to abstract a DEM, where
the graph vertices store the height information of the
pixel it represents. The difficulty of local movement
between neighboring vertices, expressed in the func-
tion g of the f (n) = g(n) + h(n) cost computations,
uses the terrain height difference, where the inclina-
tion between neighboring vertices is employed when
calculating the distance between two adjacent nodes.
This distance is computed using the Euclidean dis-
tance in the R
3
.
The work in (Chagas et al., 2022) describes a
pathfinding algorithm that produces smoothed paths
where agents have terrain inclination constraints that
they can cross during their simulated movement tasks.
A hierarchical structure models the maps to represent
large terrains, where the leaf nodes have normal vec-
tors that represent terrain inclinations in the 4 adja-
cent directions. The angle of normal vectors is used
to compute the local cost function g(n) (i.e., the cost
to traverse adjacent positions according to the terrain
relief) of the proposed pathfinding algorithm. In this
way, the higher terrain inclinations are more costly to
be traversed by the simulated agents.
Second, this work also investigates the exploration
of DNNs in path search computations.
The authors of (Takahashi et al., 2019) address
the computation of path search heuristic values with
neural networks. A Convolutional Neural Network
(CNN) extracts information from map images col-
lected for heuristics learning. Having the state-space
map and a three-dimensional matrix containing infor-
mation from the goal node and the path orientation
angle, the CNN produces a heuristic value using the
map dimensions and the number of goal node orien-
tations. The work also used the Dijkstra algorithm
output to produce the training dataset. Then the A
∗
algorithm was used to evaluate the CNN results.
The neural network model detailed in (Jindal
et al., 2017) predicts the travel distance between
source and destination GPS coordinates. This algo-
rithm combines this prediction with the time of the
day to better estimate a taxi travel time. The proposed
approach uses only raw GPS origin, destination coor-
dinates, and time of day information to perform dis-
tance and time predictions.
The NASR (Neuralized A-Star) model described
in (Wang et al., 2019) proposes using DNNs to learn
the cost functions of a heuristic algorithm used by
a custom route recommendation problem. Route
suggestions are issued from path planning-oriented
queries between source and destination positions. The
model consists of a Recurrent Neural Network (RNN)
to model the cost from the source position to the cur-
rent position and a value network (functions that as-
sign weights to nodes) to estimate the cost of the can-
didate position to the target position.
A CNN-based technique for learning heuristic
functions for path planners is presented in (Ariki and
Narihira, 2019). The network input is a map of obsta-
cles and a destination position. The network output
is a heuristic map, an image containing all heuristic
values from the destination point. The heuristic map
predicted by the CNN is used as a query table to pro-
vide a heuristic value during path planning.
The ANN
∗
presented in (Li et al., 2016) relies on
a heuristic algorithm similar to the A
∗
, although it
employs a modified heuristic function. This heuris-
tic function is generated from a regression neural net-
work, which is used to learn the map characteristics
and to predict the difficulty of pathfinding. The al-
gorithm uses the same cost function as the A
∗
algo-
rithm, using a traditional heuristic function and a mul-
tiplier, aiming to predict the route complexity. This
multiplier function is the result of the neural network,
f (n) = g(n)+ hT (n) ∗ hNN(n).
Learning Heuristics for Topographic Path Planning in Agent-Based Simulations
117

In (Kirilenko et al., 2022), different ways of train-
ing DNN to aid the pathfinding heuristic estimation
are compared with the use of uniform cost terrain
maps. Using pre-computed path information, one per-
forms DNN training to predict the absolute path cost
(cost-to-go) and the other to predict a correction fac-
tor for a Euclidean distance heuristic estimation. Ex-
perimental results show that the second approach is
superior because it finds more optimal cost paths. The
results also demonstrate that, in some cases, A
∗
with
DNN to predict the cost-to-go opened more nodes
than the standard A
∗
algorithm. This did not occur
with the DNN trained to return a correction factor to
be used by the weighted A
∗
algorithm.
In (Neisse et al., 2022), two DNN approaches to
assist in the A
∗
-based path planning over a set of to-
pographic terrain maps are explored: (1) h
sub
(n) =
DNN(n,m), where a DNN is trained for each used
100x100 pixel map representing terrain relief charac-
teristics, making the heuristic predictions h
sub
(n) for
that map only, and (2) h
subAll
(n) = DNN(n,m), where
a single DNN is trained to make heuristic predic-
tion h
subAll
(n) for three different topographic maps,
where a map identifier is used as input in the DNN
executions. Experiments showed that the second ap-
proach is more promising because it presents a good
pathfinding performance, guaranteeing a smaller ex-
pansion of nodes and, consequently, execution time.
DNNs are explored in (Weber et al., 2022) to sup-
port computing A
∗
-based safe paths in topographic
terrain maps: paths that deviate as much as possible
from the field of view of observers at different map
positions. Two different DNN strategies are com-
pared: (1) h(n) = DNN
1
(n), where the DNN is trained
to predict an absolute path cost in the R
3
, while other
path cost components are considered during the path
search runtime only, and (2) h(n) = DNN
2
(n), where
the DNN is trained to predict topographic path costs
that include a path safety cost component. Experi-
mental results show that DNN approaches can open
fewer nodes and have lower computing time than the
topographic-aware A
∗
algorithm. Using the safety
factor in the DNN2 training showed that other path
cost components can be successfully inserted in the
learning and, consequently, in the heuristic predic-
tions used to support the path search.
3 DNNS AS HEURISTIC
FUNCTIONS FOR COMPUTING
PATHS IN TOPOGRAPHIC
TERRAIN MAPS
Agent navigation behaviors for virtual simulation sys-
tems are most often modeled and implemented to
reflect the actual physical behaviors of real-world
agents. When simulations are performed in moun-
tainous terrains, the agents’ movement behaviors can
be compromised because the relief roughness may
cause all sorts of simulation problems. In many sit-
uations, the wheels of the simulated vehicles slip in
the steep terrain slopes, these slops make the vehicles
capsize in the simulations, and the agents can simply
try to use routes that make the movement progress al-
most impossible. The computation of paths consider-
ing these risks is paramount for the proper function-
ing and integrity of the agent-based simulations. As
investigated in this work, path computations should
prioritize determining routes that consider the various
characteristics of the simulated terrain topographies.
To implement virtual simulation systems in which
the terrain maps represent characteristics of real-
world mountainous regions, this work models the vir-
tual terrain as a regular grid with non-uniform costs.
This representation is based on a DEM of the to-
pographic terrain, where map nodes represent each
pixel of the terrain elevation model. Elevation in-
formation is calculated similarly to in (Chagas et al.,
2022). In it, the Euclidean distance function in the
R
3
is used to compute the g(n) and h(n) values of
the f (n) = g(n) + h(n) cost function used in the path
search. Then, the topographic terrain information is
converted to cost values stored in the map mode rep-
resentation structure. This cost is used to make up
the cost of crossing two adjacent nodes of the terrain
representation map and the training of DNNs for es-
timating the topographic route costs between two ter-
rain positions.
Figure 1 describes the calculation of the topo-
graphic path cost between two adjacent terrain nodes
A and B. Each map node has a resolution of 30 me-
ters in the real world. The height of each node (i.e.,
Height(A) and Height(B)) varies according to the re-
lief elevation in that terrain position. The height dif-
ference between two adjacent map nodes |Height(B−
A)| and the map node resolution Di f f (x, y) is used
to calculate the topographic distance Cost(A,B) given
by the triangle’s hypotenuse. Then the resulting value
is used as a local cost value between adjacent map
nodes.
SIMULTECH 2023 - 13th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
118
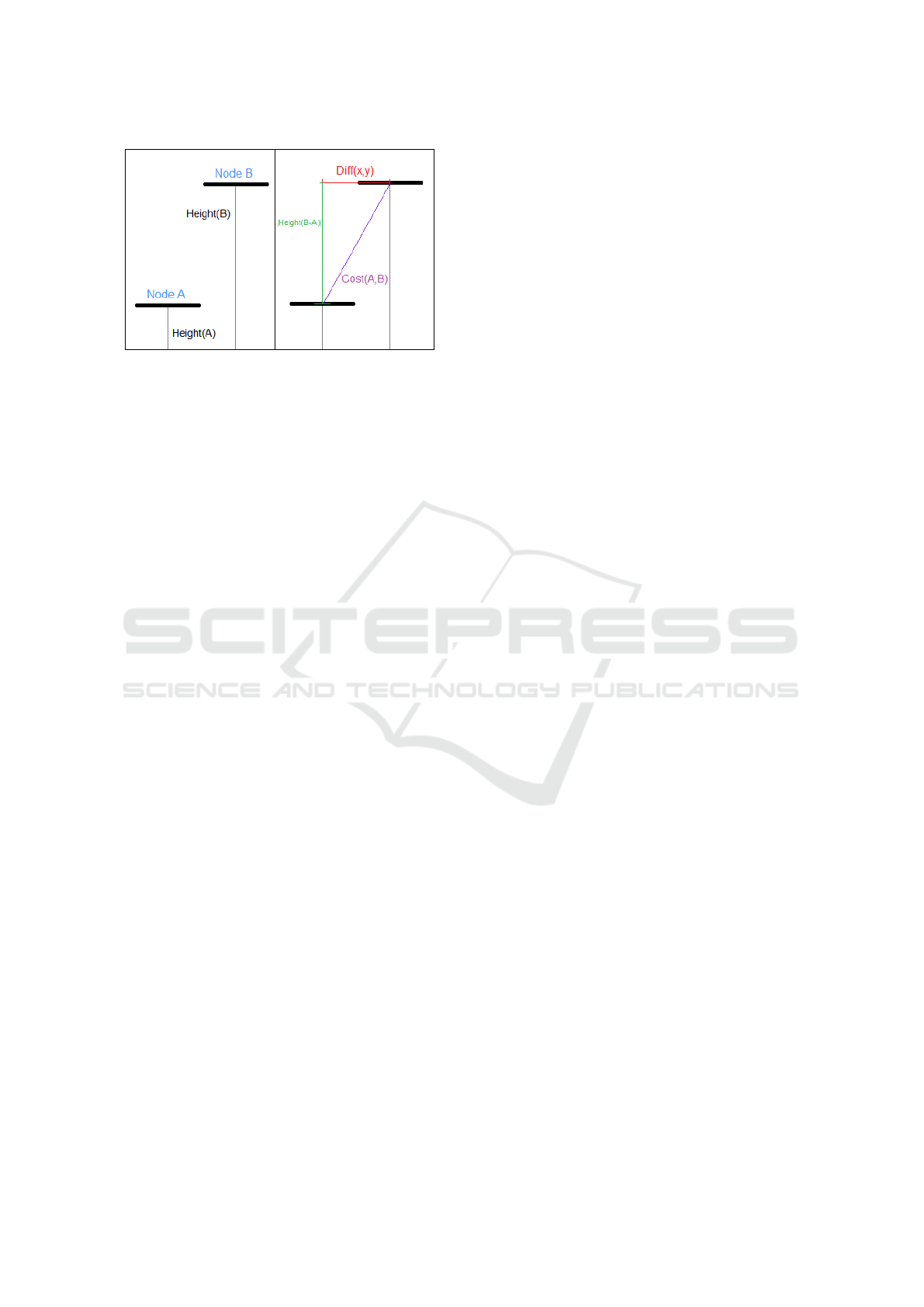
Figure 1: Cost calculation based on the height difference
between adjacent nodes in the terrain map representation.
3.1 Heuristic Topographic Path Cost
Computations with DNNs
This work investigates DNNs as heuristic functions
for the A
∗
and BiA
∗
pathfinding algorithms (Abd Al-
gfoor et al., 2015) when computing paths in terrains
with topography. To assess the impact of alternative
forms of DNN training with pre-computed path costs
between start S and goal G terrain map nodes, the
f (n) = g(n) + h(n) cost function used by these algo-
rithms uses the following heuristic formulations:
• h(n) = DNN
absCost
(n), where the DNN
absCost
(n)
returns absolute path cost heuristic values;
• h(n) = DNN
errorCoe f f
(n) ∗ h
′
(n), where the
DNN
errorCoe f f
(n) returns an error coefficient
value to be used with the h
′
(n), which computes
Euclidean distance heuristic values in the R
3
;
DNN
absCost
- the computation of paths on terrains
with topography is motivated by the works presented
in (Neisse et al., 2022) and (Weber et al., 2022). In
them, the heuristic function h(n) of the used pathfind-
ing algorithm is fully replaced by the DNN(n), such
that h(n) = DNN(n). The DNN
absCost
is trained with
absolute path cost values. These path costs are pre-
computed between start S and goal G terrain map
nodes.
DNN
errorCoe f f
- the DNN is trained to compute
an error coefficient value. This error is related to
the heuristic distance values computed using the Eu-
clidean distance function in the R
3
. Motivated by
the work presented in (Kirilenko et al., 2022), the
DNN
errorCoe f f
is trained with pre-computed error co-
efficients, where the resulting DNN returns a correc-
tion rate to be applied to the path costs returned when
standard (map-independent) heuristic distance func-
tions are used. The DNN is actually trained with
the topographic path costs dist
Topog
(n) divided by
cost estimates for the same paths returned by the Eu-
clidean distance function dist
Eucl
(n). Therefore, the
values returned by the trained DNN are DNN(n) =
(dist
Topog
(n) / dist
Eucl
(n)). In the runtime pathfind-
ing computations, the values returned by the DNN
are multiplied by those returned by the Euclidean dis-
tance function in the R
3
between the considered start
S and goal G map nodes. It means that the heuris-
tic component h(n) of the path cost calculations of
f (n) becomes dist
Eucl
(n) ∗ DNN
errorCoe f f
(n). There-
fore, the path search cost function takes the form of
a weighted cost function f (n) = g(n) + w ∗ h(n)
(Ebendt and Drechsler, 2009).
The DNN architecture (the number of neurons and
layers) used in this work was determined experimen-
tally. A fully connected Feed-Forward DNN model
is used, with the hidden layers having certain sym-
metry in relation to the number of neurons per layer.
From the performed tests, the model that obtained
the most promising results was similar to the DNN
models described in (Neisse et al., 2022) and (Weber
et al., 2022). In this model, the number of neurons is
expanded, then contracted in the hidden layers. The
DNN architecture is the following: a) the linear func-
tion for the input layer, with 7 neurons (i.e., a terrain
map ID and the (x, y, z) coordinates of start and goal
map positions), b) the ReLU function for the three
hidden layers, with [400, 500, 400] neurons, and c)
the Sigmoid function for the output layer with 1 neu-
ron to return either the absolute path cost value or the
correction factor value.
3.2 The Computation of Heuristic Maps
from DNN Estimates
The trained DNN calculates the heuristic function for
the targeted pathfinding algorithms. It computes the
heuristic value for the cost function in each node
analysis during the search. In doing so, the exe-
cution of the pathfinding algorithms may not be as
fast as required as the number of neuron calculations
in the overall DNN architecture grows. That is be-
cause heuristic calculations using standard distance
functions are much faster than those developed using
the DNN elements. The problem is that traditional
heuristic functions fail (e.g., due to the terrain topog-
raphy, the heuristic results are too different from the
actual path costs between the considered terrain po-
sitions) when other application-oriented components
must be considered in the path calculations. To ap-
proach this problem, this work explores GPU paral-
lelism functionalities to compute DNN-based heuris-
tic function values during the pathfinding execution.
Learning Heuristics for Topographic Path Planning in Agent-Based Simulations
119

This approach involves the computation and use of a
“heuristic map”.
A two-dimensional matrix can represent a heuris-
tic map in many terrain maps. The matrix values
record the topographic distances from all map posi-
tions S to a goal position G. This matrix is fed with the
DNN distance predictions generated via the GPU par-
allel computations. This heuristic map is computed
through the DNN execution and filled out once at the
first step of each pathfinding execution. It means that
the pathfinding algorithm retrieves the estimated path
cost value in the previously computed heuristic map
when it requires a heuristic value for a current node
during the path search.
According to tests in this work, the delay time re-
quired to generate the heuristic map for all 300x300
topographic map instances is at most 600 ms. More-
over, this additional computing time required to gen-
erate the heuristic map starts to pay off when the
routes’ complexity in the used terrain map increases.
For large-scale and uneven terrain maps, where a
large number of heuristic computations may have to
be developed for the opening of a large number of
nodes by the pathfinding algorithm, the GPU paral-
lel computation of all heuristic map values in a single
run is faster than the individual DNN computations of
heuristic values when required.
4 EXPERIMENTS AND RESULTS
The experiments developed in this work aimed to
evaluate the pathfinding techniques resulting from the
two different DNN models as heuristic components
for path search computations. Eight maps with differ-
ent topographies were used in the tests. For each map,
pairs of S/G map positions were generated, where
the goal was to find the shortest topographic path be-
tween these positions. The A
∗
and BiA
∗
pathfind-
ing algorithms were individually executed using the
tested DNN-based heuristic functions - DNN
absCost
and DNN
errorCoe f f
- for each pair of map positions.
The heuristic function values returned by the DNNs
were recorded in the generated heuristic maps. When-
ever this map was required, it was computed and used
during the execution of the tested pathfinding algo-
rithms. For each algorithm execution, the resulting
path’s topographic length (distance), the number of
expanded nodes, and the execution time were mea-
sured and stored for statistical analysis.
In the terrain maps’ pre-processing activities, the
following attributes were used to generate the dataset
for the DNN training:
• mapID: representing the map used in the path
computations;
• S(x,y, z): representing the start map position S;
• G(x,y, z): representing the goal map position G;
• Either (i) the shortest distance d
Topog
(S,G) be-
tween the S and G positions, representing the ab-
solute path cost, or (ii) the heuristic correction
factor computed by d
Topog
(S,G) / d
Eucl
(S,G),
where d
Topog
(S,G) is the shortest topographic
path cost and d
Eucl
(S,G) is the Euclidean distance
in the R
3
.
A sample of map positions equivalent to 10% of
each terrain map was selected to generate the train-
ing dataset. The shortest topographic distance be-
tween these positions was calculated using a parallel
version of the topographic-aware Dijkstra algorithm
(Harish and Narayanan, 2007). Moreover, the Dijk-
stra execution was adapted not to have a target node,
expanding to all map nodes. This way, the Mini-
mum Spanning Tree (MST) was generated for the se-
lected map nodes. Thus, it was possible to obtain the
shortest topographic distance of any node n in rela-
tion to all other nodes accessible from it on the ter-
rain map. Subsequently, the generated dataset was
randomly shuffled, grouped, and separated into three
different datasets. Then we used the cross-validation
method during the training, where the 70/15/15 distri-
bution was selected (70% for training, 15% for test-
ing, and 15% for validation).
The computed distances between the map’s differ-
ent S and G positions were stored in the CSV format.
All computed distances are positive real values.
Table 1: Real-world topographic terrain maps and DNN
training information.
Feature Value
Different maps 8 maps (Figure 2)
Size of each map 300 x 300 pixels
Pixel resolution 30 m
Dimension of each map 81 km
2
Sample of each map 9,000 (10%)
Dataset size (computed paths)
8 *
9,000
2
= 323,964, 000
Dataset memory size 16.5 GB
Dataset generation time ∼48 hours
Train/test/validation sets 70/15/15
The DNN
absCost
and DNN
errorCoe f f
used by the
topographic A
∗
computations were trained in two
DNNs. The DNNs were trained to less than 8.5%
of error, where the Mean Absolute Percentage Error
expressed the training error (Myttenaere et al., 2016)
given by the MAPE function (1).
MAPE =
100
n
n
∑
t=1
y
t
− ˆy
t
y
t
(1)
SIMULTECH 2023 - 13th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
120
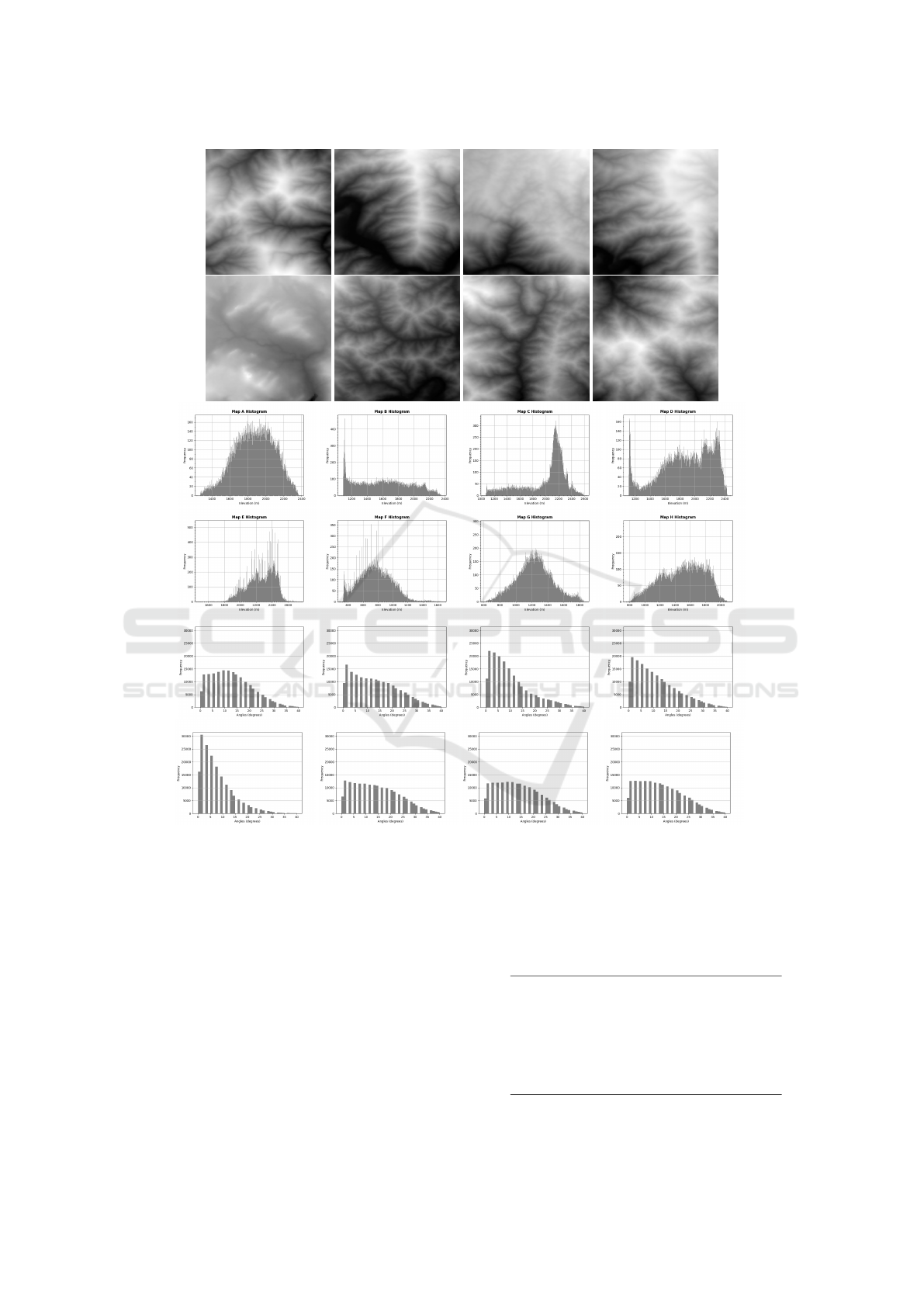
Figure 2: DEMs obtained from ((SRTM), 2013), elevation and inclination (between adjacent nodes) histograms for the real-
world topographic terrain maps used in this work.
where y
t
− ˆy
t
is the error between the predicted DNN
value and the expected value, n is the cardinality of
the dataset used to assess the trained DNN error.
In the DNN training, the two main parameters
were the loss function and optimization. While the
chosen loss function was the Mean Absolute Error,
the optimization function was ADAM (Kingma and
Ba, 2014). We explored the minibatch approach
(Goodfellow et al., 2016) with a batch size of 32. A
maximum number of 100 seasons was defined for the
training duration. A premature stop criterion of 30
seasons passed without prediction improvements was
also used. The DNNs were implemented and trained
in Python using the TensorFlow library (Abadi et al.,
2016). Table 2 details the computing environment
used throughout this work’s development.
Table 2: Computing environment used in this work.
CPU Intel® Core™ i5-12400F
CPU cores 6 cores
CPU frequency 2.5 GHz / 4.4 GHz
RAM memory (2x) 16 GB DDR5 2400MHz
GPU GeForce GTX 3060
GPU cores 3,584
GPU memory 12 GB GDDR6
Operating system Windows 11 Pro
Learning Heuristics for Topographic Path Planning in Agent-Based Simulations
121

(a) (b)
(c) (d)
Figure 3: Paths computed with (a) A
∗
DNN
absCost
, path cost = 7,788.06m; (b) A
∗
DNN
errorCoe f f
, path cost = 7,823.91m; (c)
BiA
∗
DNN
absCost
, path cost = 7,878.06m and (d) BiA
∗
DNN
errorCoe f f
, path cost = 7,817.65m.
A Generalized Linear Regression Model (GLRM)
(McCullagh and Nelder, 1989) was used to statis-
tically analyze the experimental pathfinding results.
This model was computed using the R statistical soft-
ware package (R Core Team, 2013). Details and
examples of such kind of statistical analysis can be
found in (Chagas et al., 2022) (Neisse et al., 2022)
and (Weber et al., 2022).
To compare the tested methods, the computed
dataset consists of 6,350 paths in each map (50,800
in total) for each tested heuristic approach. For ev-
ery path, the resulting topographic path cost (distance
in meters), the execution time, and the number of
opened nodes were recorded. To assess the effects of
the tested DNN-based heuristic setups, the pathfind-
ing results were detailed in terms of a) the expanded
node values in relation to the topographic distance of
the resulting path and b) the execution time values in
relation to the distance of the resulting topographic
path.
Instances of topographic paths between the same
S and G positions computed by the tested methods in
the same terrain map are presented in Figure 3. De-
spite the differences in the plotted topographic routes,
they have quite similar costs. The statistical results
obtained with the pathfinding tests are presented in
Tables 3 and 4. All pathfinding results are statistically
significant (Signif. level: 0.001, Std. Error: 0.01).
These (i) execution times and (ii) number of opened
nodes results are also shown in Figure 4.
The test results show that the DNN
errorCoe f f
opens a smaller number of nodes in relation to
the DNN
absCost
with the A
∗
and BiA
∗
algorithms.
With the trained DNNs, this result shows that the
DNN
errorCoe f f
better approximates the heuristic esti-
mates of the actual topographic path costs. The A
∗
with DNN
errorCoe f f
opens the lowest number of nodes
among the tested techniques. It opens 16.07% fewer
nodes than the A
∗
with the DNN
absCost
, the base tech-
nique in this statistical analysis. Regarding the num-
ber of opened nodes, the A
∗
with the DNN
absCost
is
second among the tested techniques. The BiA
∗
with
the DNN
errorCoe f f
opens 14.30% more nodes than the
base method, and the BiA
∗
with the DNN
absCost
opens
37.33% more nodes than the base method. The fastest
method is the BiA
∗
with the DNN
absCost
. It runs 5.21%
faster than the base method. Regarding computing
time, the A
∗
with the DNN
absCost
is second among the
tested techniques. The slowest method is the BiA
∗
with the DNN
errorCoe f f
, expending 13.20% more time
than the base method. The A
∗
with DNN
errorCoe f f
is
11.23% slower than the base method. The results in-
dicate that the tested pathfinding algorithms with the
DNN
errorCoe f f
method is slower because they require
the additional calculation of the Euclidean distances.
To assess the topographic path costs resulting
SIMULTECH 2023 - 13th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
122

(a)
(b)
Figure 4: (a) Expanded nodes x topographic path cost, and (b) Execution time x topographic path cost.
from the tested pathfinding algorithms with the
heuristics proposed in this work, the Mean Absolute
Percentage Error (MAPE) function was used. Table 5
shows that the paths generated by DDN-based heuris-
tics had a maximum cost difference of 1.34% in rela-
tion to the optimal path costs returned by the A
∗
with
the Euclidean distance heuristic function.
The experiments indicate that the pathfinding
method choice is based on a tradeoff between ex-
panded nodes and execution time. While the
DNN
errorCoe f f
method presents fewer memory costs,
it is slower than the DNN
absCost
method. In addi-
tion, the DNN
absCost
and DNN
errorCoe f f
methods re-
sulted in shorter topographic paths when used with
the A
∗
algorithm in comparison to the topographic
path costs of the BiA
∗
algorithm. Overall, the tested
approaches generalized the eight different terrain to-
pographies well, meaning that they can approach the
training of new terrains.
In summary, the proposals and experimental re-
sults presented in this paper analyze the combina-
tion of the DNNs and pathfinding techniques for the
heuristic map generation and use, the exploration of
the parallel version of the topographic-aware Dijkstra
algorithm (Harish and Narayanan, 2007) to construct
the training dataset, and the DNN model to reproduce
the heuristic computations in different topographic
terrain maps. This work analyzes DNN heuristic
methods for learning a large number of path cost in-
stances (i.e., shortest topographic path distances) be-
tween two S/G terrain map positions and the conse-
quent learning of targeted map topographic character-
istics. This work also presents the statistical analysis
of experimental pathfinding results, where the tested
DNN-based algorithms’ performance is analyzed.
Learning Heuristics for Topographic Path Planning in Agent-Based Simulations
123
Table 3: Statistical results for execution time x topographic path cost.
Estimate Std. Error t Value Pr(>|t|)
Intercept -4.654 0.0059 -784.69 <2e-16
A
∗
DNN
absCost
0.0000 0.0000 70,586.76 <2e-16
A
∗
DNN
errorCoe f f
0.1064 0.0075 14.18 <2e-16
BiA
∗
DNN
absCost
-0.0535 0.0074 -7.27 <3.57e-13
BiA
∗
DNN
errorCoe f f
0.1240 0.0069 17.93 <2e-16
Table 4: Statistical results for expanded nodes x topographic path cost.
Estimate Std. Error t Value Pr(>|t|)
Intercept 5.4290 0.0038 1,424.73 <2e-16
A
∗
DNN
absCost
0.0002 0.0000 418.82 <2e-16
A
∗
DNN
errorCoe f f
-0.1752 0.0033 -52.39 <2e-16
BiA
∗
DNN
absCost
0.3172 0.0033 96.68 <2e-16
BiA
∗
DNN
errorCoe f f
0.1337 0.0031 43.37 <2e-16
Table 5: Percentage of DDN-based path costs compared to
the optimal path costs (computed with the A
∗
algorithm with
Euclidean distance heuristic function).
DNN
absCost
DNN
errorCoe f f
A
∗
1.31% 0.87%
BiA
∗
1.34% 0.92%
5 FINAL REMARKS
The computation of path routes for agents in topo-
graphic terrain maps is a relevant problem for many
agent-based simulation applications. In this context,
this work shows that the heuristic functions learned by
DNNs can support the path search in topographic map
representations. The use of the DNN allows the im-
plementation of the search for paths which combines
path pre-processed information – the pre-computed
topographic distances in the terrain map that are later
learned into DNN memory structure – with the actual
path cost computations developed during the execu-
tion time of different path planning algorithms.
Future work in our project will aim at the hier-
archical and irregular capture of the extremely large
real-world topographic terrain maps, including a large
number of maps with more distinct topographic char-
acteristics (e.g., varying from flat areas to mountain
regions), in addition to other required adjustments for
DNN-based pathfinding algorithms. Moreover, we
aim to investigate the learning of characteristics that
could be more independent of the used terrain maps,
and the investigation of other DNN architectures, with
special attention to the computation of topographic-
aware agent routes for agent-based simulations.
ACKNOWLEDGMENT
We thank the Brazilian Army Strategic Program AS-
TROS for financial support through the SIS-ASTROS
GMF project (898347/2020) - TED 20-EME-003-00.
REFERENCES
Abadi, M., Barham, P., Chen, J., Chen, Z., Davis, A., Dean,
J., Devin, M., Ghemawat, S., Irving, G., and Isard, M.
(2016). Tensorflow: A system for large-scale machine
learning.
Abd Algfoor, Z., Sunar, M. S., and Kolivand, H. (2015).
A comprehensive study on pathfinding techniques for
robotics and video games. International Journal of
Computer Games Technology, 2015.
Ariki, Y. and Narihira, T. (2019). Fully convolutional
search heuristic learning for rapid path planners. arXiv
preprint arXiv:1908.03343.
Chagas, C., Zacarias, E., de Lima Silva, L. A., and Pignaton
de Freitas, E. (2022). Hierarchical and smoothed to-
pographic path planning for large-scale virtual simula-
tion environments. Expert Systems with Applications,
189:116061.
Chen, S., Shi, G., and Liu, Y. (2009). Fast path searching
in real time 3d game. In WRI Global Congress on
Intelligent Systems, volume 3, pages 189–194.
Ebendt, R. and Drechsler, R. (2009). Weighted A
∗
search –
unifying view and application. Artificial Intelligence,
173(14):1310–1342.
Frana, P. L. and Misa, T. J. (2010). An interview with
edsger w. dijkstra. Communications of the ACM,
53(8):41–47.
Ganganath, N., Cheng, C.-T., and Tse, C. K. (2014). Find-
ing energy-efficient paths on uneven terrains. In
2014 10th France-Japan/ 8th Europe-Asia Congress
on Mecatronics (MECATRONICS2014- Tokyo), pages
383–388.
SIMULTECH 2023 - 13th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
124

Goodfellow, I., Bengio, Y., Courville, A., and Bengio, Y.
(2016). Deep learning, volume 1. MIT press Cam-
bridge.
Harish, P. and Narayanan, P. J. (2007). Accelerating large
graph algorithms on the gpu using cuda. In A., S.,
P., M., B., R., and P., V., editors, High Performance
Computing – HiPC 2007, pages 197–208. Springer.
Hart, P. E., Nilsson, N. J., and Raphael, B. (1968). A for-
mal basis for the heuristic determination of minimum
cost paths. IEEE Transactions on Systems Science and
Cybernetics, 4(2):100–107.
Jindal, I., Qin, T., Chen, X., Nokleby, M., and Ye, J.
(2017). A unified neural network approach for esti-
mating travel time and distance for a taxi trip. arXiv
preprint arXiv:1710.04350.
Kingma, D. P. and Ba, J. (2014). Adam: A
method for stochastic optimization. arXiv preprint
arXiv:1412.6980.
Kirilenko, D., Andreychuk, A., Panov, A., and Yakovlev,
K. (2022). Transpath: Learning heuristics for grid-
based pathfinding via transformers. arXiv preprint
arXiv:2212.11730.
Li, G., Wang, G., Wang, Q., Fei, F., L
¨
u, S., and Guo, D.
(2016). Ann: A heuristic search algorithm based on
artificial neural networks. In Proceedings of the 2016
International Conference on Intelligent Information
Processing, pages 1–9.
Macal, C. (2016). Everything you need to know about
agent-based modelling and simulation. Journal of
Simulation, 10:144–156.
McCullagh, P. and Nelder, J. A. (1989). Generalized Linear
Models, volume 37. CRC Press.
Myttenaere, A. d., Golden, B., Grand, B. L., and Rossic, F.
(2016). Mean absolute percentage error for regression
models. Neurocomputing, 192:38–48.
Neisse, C., Soares, J. L., Silva, L. A., and Freitas, E. P.
(2022). Investigating deep neural networks as heuris-
tic functions for path planning with topographic ter-
rain characteristics in agent-based simulation. In
2022 IEEE 31st International Symposium on Indus-
trial Electronics (ISIE), pages 174–181. IEEE.
Pohl, I. (1971). Bi-directional search. in machine. Intelli-
gence, 6:124–140.
R Core Team (2013). R: A Language and Environment for
Statistical Computing. Vienna, Austria.
Spies, M., Todescato, M., Becker, H., Kesper, P., Waniek,
N., and Guo, M. (2019). Bounded suboptimal search
with learned heuristics for multi-agent systems. Pro-
ceedings of the AAAI Conference on Artificial Intelli-
gence, 33(01):2387–2394.
(SRTM), N. S. R. T. M. (2013). Shuttle radar topog-
raphy mission (srtm) global. Distributed by Open-
Topography. Accessed: 2023-04-12. Available:
https://doi.org/10.5069/G9445JDF.
Takahashi, T., Sun, H., Tian, D., and Wang, Y. (2019).
Learning heuristic functions for mobile robot path
planning using deep neural networks. In Proceedings
of the International Conference on Automated Plan-
ning and Scheduling, volume 29, pages 764–772.
Wang, J., Wu, N., Zhao, W. X., Peng, F., and Lin, X.
(2019). Empowering a* search algorithms with neural
networks for personalized route recommendation.
Weber, C. M., Freitas, E. P., and Silva, L. A. (2022). Safe
and topographic path planning with deep neural net-
works. In 2022 21st Brazilian Symposium on Com-
puter Games and Digital Entertainment (SBGames),
pages 1–6. IEEE.
Learning Heuristics for Topographic Path Planning in Agent-Based Simulations
125
