
Design and Simulation of Adsorption Citrus Picking Actuator
Yiwei Zhang, Lifeng Wang
*
and Qiang Luo
College of Mechanical Engineering, Chongqing Three Gorges University, Chongqing, China
Keywords: Adsorption Type, Citrus, End Actuator, Simulation Analysis.
Abstract: In order to realize mechanized citrus picking, an adsorption type non-destructive citrus picking end effector
was designed based on the basic characteristics of citrus, which is mainly composed of three parts: shearing
mechanism, adsorption mechanism and transmission frame. The three-dimensional model of the end effector
is established, and its kinematics simulation and finite element simulation analysis are carried out to ensure
the rationality of the mechanism design and material selection. The simulation results show that the structure
design and motion characteristics of the end effector are reasonable, which can basically meet the needs of
citrus picking.
1 INTRODUCTION
Citrus is one of the pillar industries of agriculture in
the hilly areas of southwest China. At present, it has
become an important supporting industry for
Chengdu Chongqing Economic Circle to build a
characteristic and efficient agricultural system.
However, the level of agricultural mechanization in
hilly areas is low, and the cost of manual picking
accounts for more than 30% of the total cost of citrus.
In addition, with the serious problems of
industrialization development and population aging in
China, citrus picking costs will further increase, so
agricultural mechanization in hilly and mountainous
areas is imminent (Zhang, 2019; He, 2018; Li, 2008).
Experts and scholars at home and abroad have
carried out more in-depth research on automatic fruit
and vegetable picking machinery, among which Johan
Baeten, Davidson, etc. have analyzed apple machine
picking and designed corresponding picking actuators
(Baeten, 2008; Monta, 1998); In addition, Han Shukui
(Han, 2019) Liu Yue (Liu, 2014), Xu Liming (Xu,
2018), Yang Wenliang (Yang, 2019) , Zeng Wen
(Zeng, 2019) and others have studied the citrus
picking problem and its picking actuator. Among
them, a hairdresser pusher picking end actuator from
Kubota (Kubota, 2009), Japan, a picking robot based
on snake like swallowing principle from Fu Shun (Fu,
2017), and an underactuated three finger picking end
actuator from Wu Jijun (Wu, 2018) are very
representative.
At present, the main problems of citrus picking
robot are long picking time, low efficiency and high
damage rate. Therefore, this paper designs an end
effector for the non-destructive harvesting of ancient
red tangerine, and uses the finite element method to
carry out simulation analysis.
2 STRUCTURE DESIGN OF
ADSORPTION END EFFECTOR
2.1 Basic Physical Characteristics of
Citrus
Randomly select 100 ancient red oranges and ponkan
oranges with different shapes and sizes, measure the
transverse diameter, longitudinal diameter and fruit
stem diameter of ancient red oranges and ponkan
oranges with vernier calipers, and count the largest
and smallest fruit stem diameter, and the transverse
diameter and longitudinal diameter of oranges. Use
the electronic scale to measure their mass and count
the maximum mass and minimum mass. After
measurement, the average weight of the ancient red
orange is 88g, the average transverse diameter is
53mm, the average longitudinal diameter is 45mm,
and the average diameter of the fruit stalk is 2.1mm.
28
Zhang, Y., Wang, L. and Luo, Q.
Design and Simulation of Adsorption Citrus Picking Actuator.
DOI: 10.5220/0012142500003562
In Proceedings of the 1st International Conference on Data Processing, Control and Simulation (ICDPCS 2023), pages 28-33
ISBN: 978-989-758-675-0
Copyright
c
2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)

Table 1: Measurement results of parameters of Citrus.
p
aramete
r
maximu
m
minimu
m
avera
g
e
quality(g) 127 62 88
Transverse diameter(mm) 65 46 53
longitudinal diameter(mm) 58 36 45
diameter of the fruit stalk(mm) 2.5 1.7 2.1
Figure 1: Separation experiment of citrus fruit and stem.
2.2 Basic Mechanical Properties of
Citrus
Take 50 oranges, connect the hook of the
dynamometer with the fruit stem of the citrus through
an inelastic rope, and slowly pull the tension meter at
a constant speed until the fruit stem and the fruit are
separated. The maximum force required to separate
the fruit from the peduncle is 46.2N, and the
minimum force is 21.9N.
Cut the fruit stem by simply supported beam and
measure the required shear force (as shown in Table
2), and the maximum cutting resistance required is
79.2N.
2.3 Structure Design of Adsorption
Citrus end Effector
In combination with the above citrus related
parameters, an adsorption type citrus non-destructive
picking end actuator is designed as shown in Figure
2, which is composed of three parts: a shearing
mechanism, an adsorption mechanism and a
transmission frame.
Figure 2: Three-dimensional model of adsorption end-
effector.
Table 2: Experimental data of fruit stem cutting.
diameter
of the
fruit stalk
(m
m
)
maximum
cutting
resistance(N)
diameter o
f
the fruit
stalk(mm)
maximum
cutting
resistance(N)
1.9 47.5 2.1 71.3
3.0 77.8 2.1 59.8
2.3 67.9 3 79.2
2.4 56.4 2.8 63.5
2.5 63.5 2.1 67.3
2.8 62.8 2 72.5
2.7 53.5 2 75.3
2.6 63.3 1.9 53.8
2.9 71.5 2.7 62.6
2.2 66.2 2.0 67.3
Design and Simulation of Adsorption Citrus Picking Actuator
29
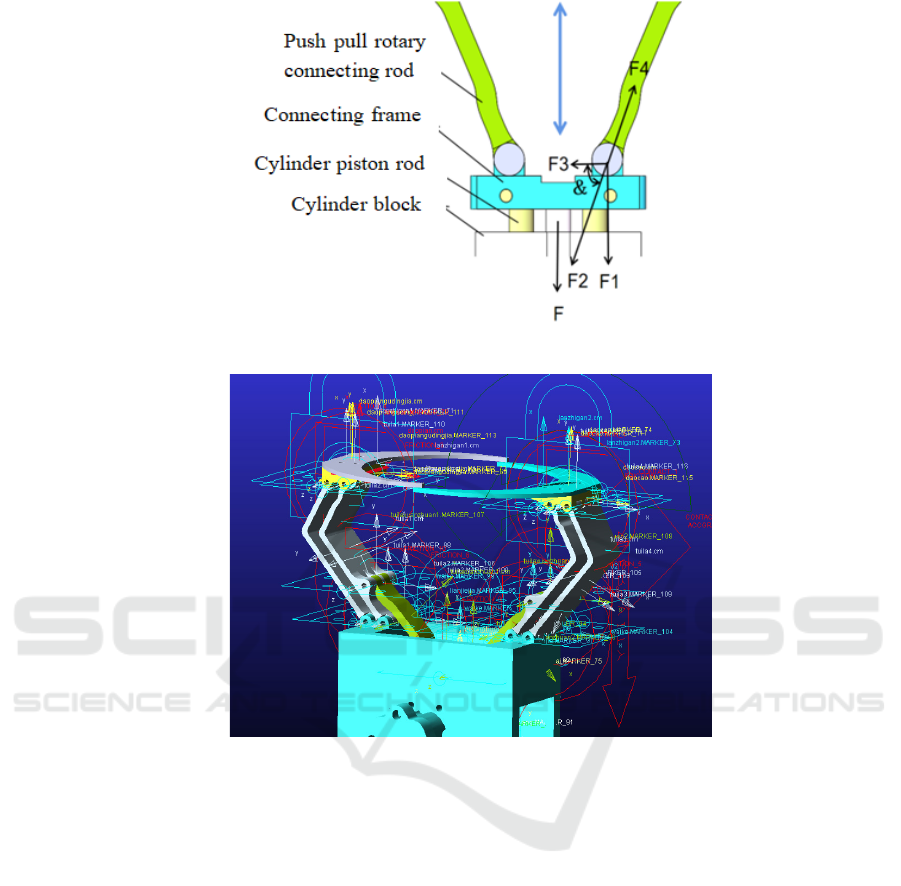
Figure 3: Partial drawing of shearing mechanism.
Figure 4: Parameter setting
2.4 Key Structure Design of Actuator
The shearing mechanism is designed based on the
parallelogram connecting rod mechanism. The piston
rod pulls the parallelogram mechanism to move
symmetrically towards the center, and the blade
moves in parallel with the knife slot to cut the citrus
fruit stalks.
At the moment of shearing by the shearing
mechanism, the angle is about 60°, and the maximum
cutting resistance of citrus is 79.2N. Calculate the
tensile force F according to Figure 3.
1
=2 137NFF≈
Combined with the actual environment, the
pneumatic double rod cylinder TN16.10 with a
0.5MPa air pressure pull of 150.8N is selected as the
cylinder in the shear mechanism.
3 FINITE ELEMENT
SIMULATION ANALYSIS OF
END ACTUATOR
3.1 Dynamic Simulation Analysis of
end Actuator
Use Adams software to carry out kinematics
simulation, create constraints and define the material
property as high manganese steel 7.98×10
-3
g/m3,
2.06×10
5
N/mm
2
, Poisson's ratio 0.26; Steel 7.801×10
-
3
g/mm3, 2.07×10
5
N/mm
2
, Poisson's ratio 0.29. Load
150N tension on the cylinder piston rod to drive the
ICDPCS 2023 - The International Conference on Data Processing, Control and Simulation
30
(a) (b)
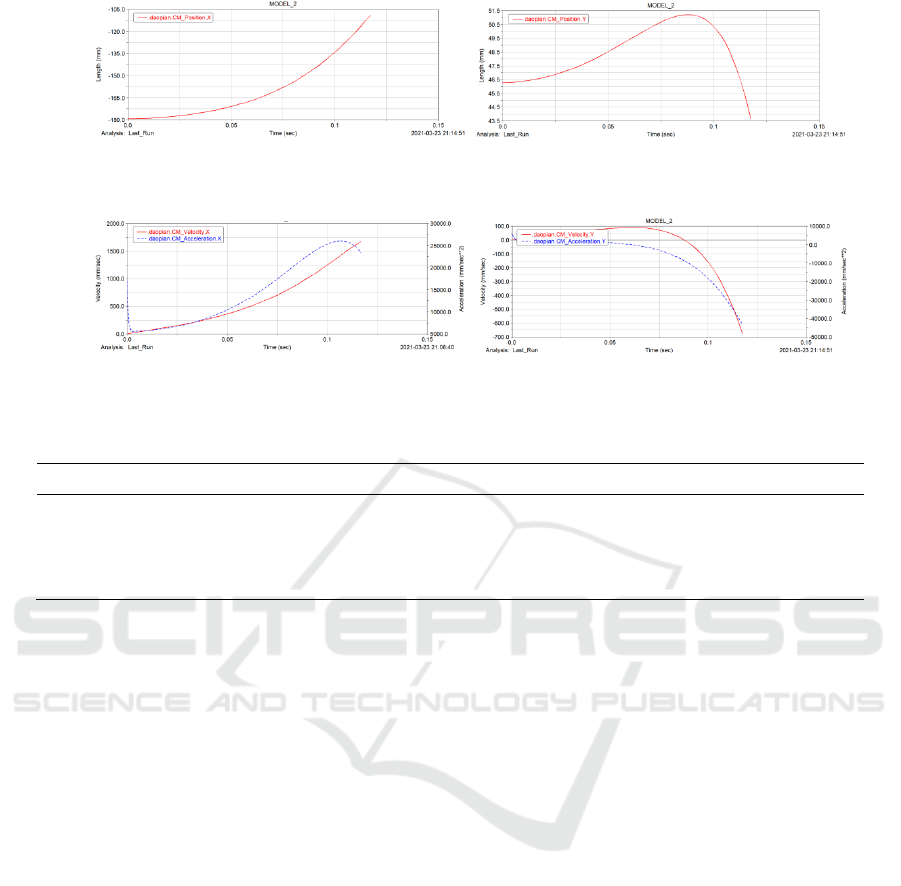
Figure 5: Displacement curve of blade in X and Y direction.
(a) (b)
Figure 6: Velocity and acceleration curve of blade in X and Y direction.
Table 3: Material Properties.
material density(g/mm
3
) Young's modulus(N/mm
2
) Poisson's ratio
(stem) Branch
0.000438 11000 0.33
(blade)Permanganate steel 0.007980 206000 0.26
(connecting link) steel 0.007801 207000 0.29
(connecting link)pla 0.00121 3000 0.35
shear mechanism to move, and finally obtain the force,
speed and acceleration curves in the movement
process.
According to the analysis of the displacement,
speed and acceleration of the blade, the maximum
distance of the blade moving in the X direction is
about 70mm, the maximum distance in the Y direction
is about 7mm, and the maximum distance of the
cylinder in the Y direction is 10mm; Under the tension
of 150N, the speed and acceleration of the blade are
smooth curves without obvious instantaneous impact,
so the mechanism of the picking end actuator is well
stressed, without movement interference, and the
structure is reasonable.
3.2 Stress Analysis of the Actuator at
the end of Citrus Picking
Use ansys and Hyperworks for stress analysis. In
order to obtain more accurate data, the grid of the fruit
stem and blade is densified, and the tension on the
connecting frame is set to 150N. As shown in Table 3,
the material properties of the blade, fruit stem and
connecting rod are set, and the corresponding stress
and strain are obtained after solving.
The stress and strain nephogram of the connecting
rod and tool holder made of steel is shown in a in
Figure 7a. It can be clearly seen that the maximum
stress of the tool holder is 4.354MPa and the
maximum strain is 1.79×10
-5
;The maximum stress
of the rotary connecting rod is 7.483MPa, and the
maximum strain is 3.089×10
-5
;The maximum stress
of the connecting frame is 7.472MPa, and the
maximum strain is 3.084×10
-5
;The maximum stress
of push pull rotary connecting rod is 6.262MPa, and
the maximum strain is 2.584×10
-5
;Therefore, the
maximum stress of the whole actuator frame is
7.483MPa, and the maximum strain is 3.089×10
-5
,
which is far less than the yield strength of steel from
200MPa to 400MPa. In order to reduce cost and
lightweight, the alternative verification of pla material
with yield strength of 48MPa is shown in Figure 6b.
Design and Simulation of Adsorption Citrus Picking Actuator
31
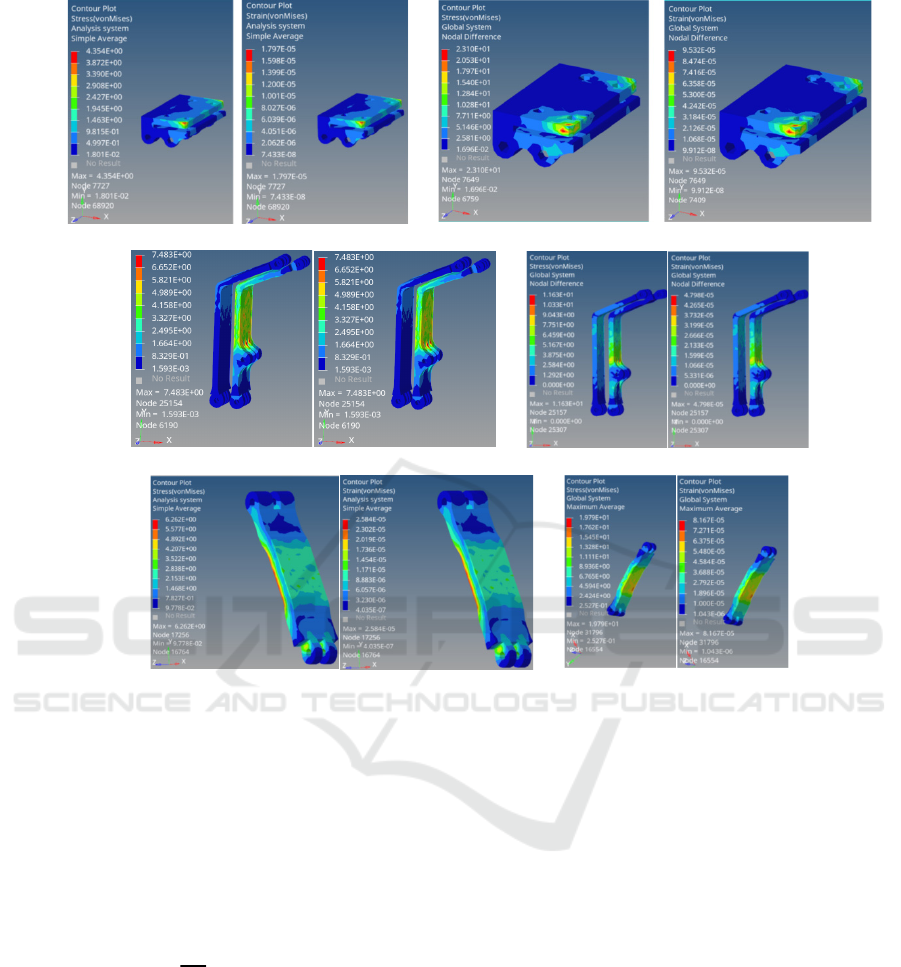
Tool holder stress and strain
Stress and strain of rotary link
Stress and strain of push-pull rotary connecting rod
(a) steel products (b) pla products
Figure 7: Key parts stress and strain.
The analysis of the stress and strain nephogram of the
mechanism made of pla material shows that the
maximum stress on the tool holder is 23.10MPa, and
the maximum strain is 9.532×10
-5
, according to the
yield strength of the pla material, the safety factor
n=1.5 is selected, and the following is calculated:
a48a32
n
a10.23
s
smax
MPMPMP << ==
σ
σ
Therefore, the tool holder uses pla material.
Similarly, the strength of rotary connecting rod, shell,
push-pull rotary connecting rod and other parts meet
the design requirements. Pla material can be used
instead of steel.
4 CONCLUSION
According to the requirements of non-destructive
picking and the basic physical characteristics of
ancient red tangerine, an adsorption type end effector
for non-destructive picking of ancient red tangerine
was designed and simulated and optimized using
finite element method. The prototype manufacturing
of the adsorbed ancient red orange non-destructive
picking end actuator was completed, and the
adsorption performance and shear performance of the
prototype were verified. The non-destructive picking
function of the adsorbed ancient red orange picking
end actuator was realized, which provided conditions
for the subsequent overall assembly test of the
intelligent orange picking robot.
ICDPCS 2023 - The International Conference on Data Processing, Control and Simulation
32

ACKNOWLEDGMENTS
This work is supported by Chongqing Artificial
Intelligence+Intelligent Agriculture Discipline Group
Open Fund Project (ZNNYKFB201906), Science and
Technology Research Program of Chongqing
Municipal Education Commission (KJZD-
K201901202, KJQN202101225).
CONFLICTS OF INTEREST
The authors confirm there is no conflict of interest.
REFERENCES
Zhang Yiwei, Luo Qiang, Wang Haibao, Qian Lixia. Analysis
of Citrus mechanized picking in Chongqing. Guangxi
Agricultural Mechanization, 2019 (06): 14
He Jiacheng, Wang Yang, Liu Hongbo, et al. Design of
portable orchard picker. Research on agricultural
mechanization, 2018, 40 (5): 83-87
Li Qinchuan, Hu Ting, Wu Chuanyu, Hu Xudong, Ying
Yibin. Summary of research on end effector of fruit
and vegetable picking robot. Journal of Agricultural
Machinery, 2008 (03): 175.179 + 186.
Baeten J, K Donné, Boedrij S, et al. Autonomous fruit
picking machine: A robotic apple harvester// Field and
Service Robotics. Springer, 2008.
Monta M, Kondo N, Ting K C . End-Effectors for Tomato
Harvesting Robot. Springer Netherlands, 1998.
Han Shukui, Zhao Zikai, Zhang He, Zhou Yuan, Wang
Zhenying. Design and simulation analysis of end
effector of circular citrus picking robot. Mechanical
Design, 2019, 36 (S2): 82.85.
Liu Y, Gao G.H, Wang H, Qin Y.N, Lian M.J.Innovative
Design and Simulation of a Four.Wire Flexible
Manipulator. Advanced Materials Research, 2014.
Xu Liming et al. 2018. Design and test of end effector of
navel orange picking robot. Journal of Agricultural
Engineering, 34(12):53.6.
Yang Wenliang, Feng Hu, Han Yali, Xu Youfeng.
Development of end effector of spherical fruit picking
robot driven by air pressure. Research on Agricultural
Mechanization, 2019, 41(11):149.154.
Zeng Wen, Li Kangzhen, Liu Tianhu, Xia Hongmei. Design
of end effector for citrus combing and shearing.
Forestry Machinery and Woodworking Equipment,
2019,47(09):9.13.
Kondo Zhi. Agricultural Robot. China Agricultural
University Press, 2009.
Fu Shun. Design and Research on End Effector of Citrus
Picking Robot. Chongqing University of Technology,
2017.
Wu Jijun. Design and Grasping Characteristics of End
Effector of Picking Robot. Tianjin Agricultural
University, 2018.
Design and Simulation of Adsorption Citrus Picking Actuator
33
