
A Dynamic Computational Model of Head Sway Responses in Human
Upright Stance Postural Control During Support Surface Tilt
Vittorio Lippi
1,2 a
, Christoph Maurer
2b
and Stefan Kammermeier
3c
1
Institute of Digitalization in medicine, Faculty of Medicine and Medical Center, University of Freiburg,
Freiburg im Breisgau, Germany
2
Clinic of Neurology and Neurophysiology, Medical Centre-University of Freiburg, Faculty of Medicine,
University of Freiburg, Breisacher Straße 64, 79106, Freiburg im Breisgau, Germany
3
Klinikum der Universität München, Ludwig-Maximilians-Universität LMU, Neurologische Klinik und Poliklinik,
Marchioninistraße 15, 81377 München, Germany
Keywords: Modelling, Computational Model, Feedback Control Systems, Parameters Identification, Posture Control,
Human Motor Control.
Abstract: Human and humanoid posture control models usually rely on single or multiple degrees of freedom inverted
pendulum representation of upright stance associated with a feedback controller. In models typically focused
on the action between ankles, hips, and knees, the control of head position is often neglected, and the head is
considered one with the upper body. However, two of the three main contributors to the human motion
sensorium reside in the head: the vestibular and the visual system. As the third contributor, the proprioceptive
system is distributed throughout the body. In human neurodegenerative brain diseases of motor control, like
Progressive Supranuclear Palsy PSP and Idiopathic Parkinson’s Disease IPD, clinical studies have
demonstrated the importance of head motion deficits. is work specifically addresses the control of the head
during a perturbed upright stance. A control model for the neck is proposed following the hypothesis of a
modular posture control from previous studies. Data from human experiments are used to fit the model and
retrieve sets of parameters representative of the behavior obtained in different conditions. e result of the
analysis is twofold: validate the model and its underlying hypothesis and provide a system to assess the
differences in posture control that can be used to identify the differences between healthy subjects and patients
with different conditions. Implications for clinical pathology and application in humanoid and assistive
robotics are discussed.
1 INTRODUCTION
1.1 Overview
The analysis of body segment sway during a
perturbed upright stance is an established
experimental method to investigate posture control
and the underlying neurological processes in human
subjects (e.g., Assländer & Peterka, 2016; Goodworth
& Peterka, 2018) and to test the balance capabilities
of humanoid robots (Pasma et al., 2018; Zebenay et
al., 2015). Perturbation of upright stance allows
insights into the internal control mechanisms'
a
https://orcid.org/0000-0001-5520-8974
b
https://orcid.org/0000-0001-9050-279X
c
https://orcid.org/0000-0003-0158-889X
limitations and pinpoint the cause of possible deficits.
These alterations may be externally applied or
initiated by voluntary motion of the subject itself.
For the underlying data of our proposed model,
upright standing subjects were studied during the
passively applied small-angle rotational disturbance
with multiple superimposed sinusoidal frequencies of
their support surface, where the center of rotation was
placed at the ankle joint. Three groups of subjects
were investigated: healthy control subjects and
neurodegenerative disorders with movement control
impairment: Progressive Supranuclear Palsy PSP and
Idiopathic Parkinson’s Disease IPD. The body
Lippi, V., Maurer, C. and Kammermeier, S.
A Dynamic Computational Model of Head Sway Responses in Human Upright Stance Postural Control During Support Surface Tilt.
DOI: 10.5220/0012154300003543
In Proceedings of the 20th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2023) - Volume 1, pages 17-28
ISBN: 978-989-758-670-5; ISSN: 2184-2809
Copyright © 2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
17
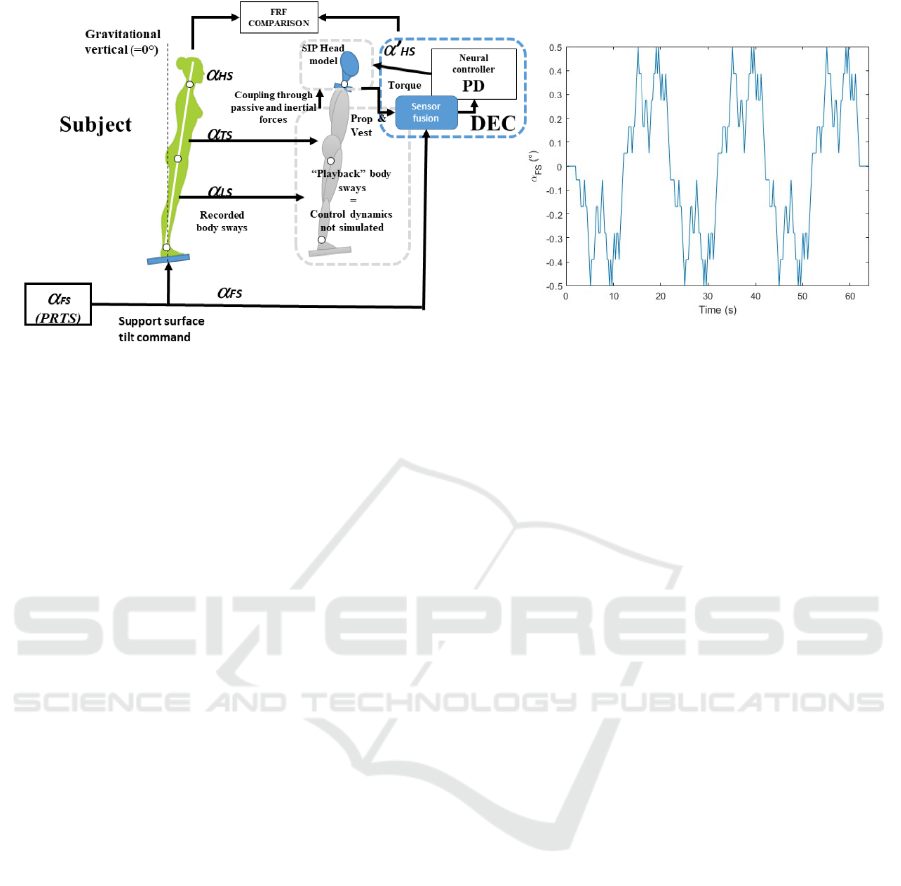
Figure 1: General Scheme of the simulated system. The recorded sways for the legs and trunk and the known PRTS input
profile are used to simulate the neck movement. On the left, the profile of the PRTS stimulus 𝛼
with peak-to-peak amplitude
1°.
segment movements were recorded with 3D
ultrasound motion capture detailed in Methods and
Kammermeier et al., 2018. The proposed model fits
data from human experiments in different conditions,
i.e., eyes-open, and eyes-closed, combined with two
amplitudes. The model was implemented with and
without including nonlinearities observed in previous
experiments to test how they capture the nonlinear
responses typical of humans. Usually, larger
disturbances are, in proportion, compensated more
than smaller ones (Hettich et al., 2013 and 2015).
Based on these results, a model for a quantitative
description of the posture control task in terms of
input (perturbation stimulus) and output (body
segment sway) was constructed, focusing on the head
segment. The response can be represented as a
transfer function in the frequency domain and
developed further as a dynamic system of response
regulation. The inherently unstable human upright
posture requires dynamic feedback control based on
sensory input.
The degrees of freedom vary depending on the
scenario: a single-inverted-pendulum model (SIP),
representing the torque provided around the ankles, is
suitable to describe small movements produced by
small perturbations. An added hip segment with
intersegmental coordination (Hettich et al., 2014)
results in a double-inverted pendulum model (DIP).
Involving the knees in the compensation of more
intense and challenging disturbances with a third
degree of freedom (Atkeson & Stephens 2007)
suggests that responses could be possibly dictated by
optimization criteria penalizing the amplitudes of
joint angles excursions and the applied torques, at
least in transient responses to impulsive disturbances.
More than 2 degrees of freedom are usually modeled
when applying posture control models to humanoids
in order to cover the number of actuators in their
kinematics (e.g., three in Ott et al., 2016) or to model
the interaction between a human and a wearable
exoskeleton (e.g., four in Lippi & Mergner, 2020). In
most cases, the control of the head is not taken into
account, and the head is considered together with the
rest of the upper body since the head is considered a
minor fraction of the upper body's mass (about 16%,
in De Leva, 1996).
This paper addresses the modeling of head control
as a modular control system, associating each degree
of freedom with a feedback controller (Hettich et al.,
2014; Lippi & Mergner, 2017). The specific
formulation of the control problem (§ 2.1) allows the
identification of the control parameters just for the
module controlling the neck without including a full
model of the other joints.
The internal representation of human body motion
in space is construed from three main sensory input
qualities for the purpose of motor control (e.g.,
summarized in Dieterich & Brandt, 2019): vestibular
angular acceleration and gravitational tilt from the
inner ear; visual alignment to vertical and horizontal
references from the eyes; and proprioceptive joint and
muscle sensors for their mutual relative positions
throughout the body. Each biological sensor type has
optimal sensory operating ranges of kinetic motion
and stationary position to overlap with the weak
ranges of other sensors. Two of these three sensory
contributors reside in the freely mobile human head,
unlike in current self-propelled humanoid robots
(e.g., Boston Dynamics Atlas). Positioning vision and
vestibular system in a small mobile mass on top
ICINCO 2023 - 20th International Conference on Informatics in Control, Automation and Robotics
18
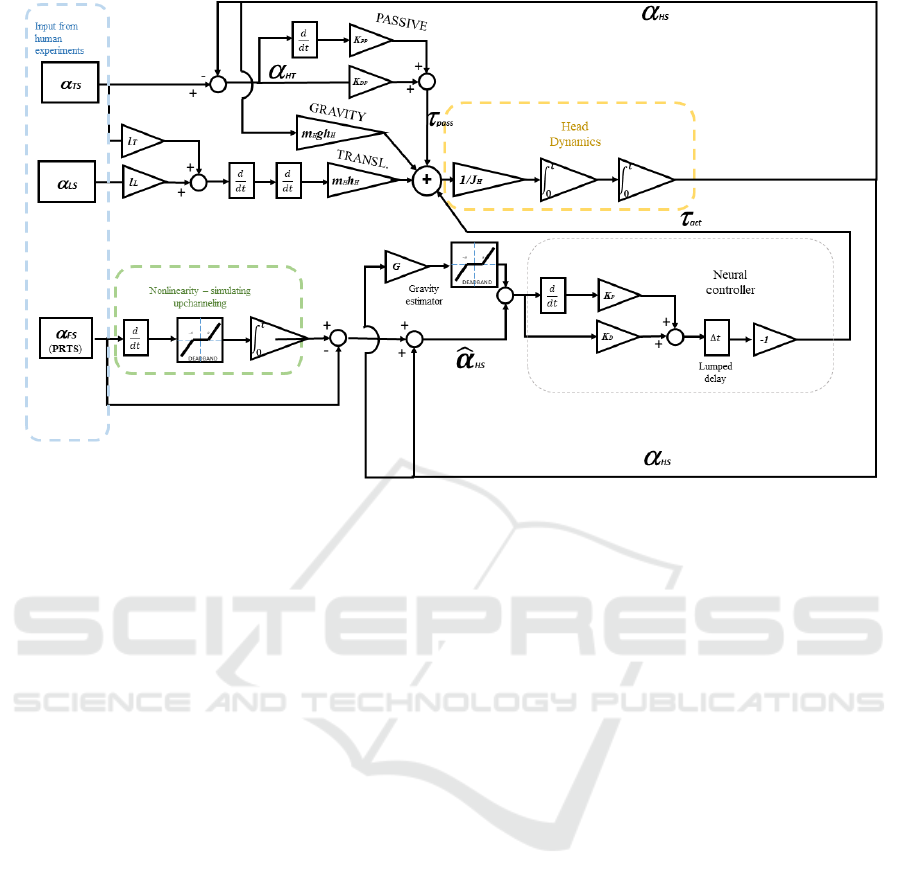
Figure 2: The Dynamic system from equations (1) to (7). Here the controlled variable is the head-in-space angle 𝛼
. To
control the head-to-trunk angle 𝛼
, such a variable should be provided as input for the neural controller instead of 𝛼
. As
the reference is assumed to be 0° the controlled variable equals the error 𝜀 in (1). The recorded body sway for the trunk and
legs is used as input. In contrast, the recorded head sway is used outside the simulation to optimize the parameters and evaluate
the result.
instead of within the main mass of the body has
several practical and evolutionary advantages. This
feature could not yet be practically implemented in
humanoid robotics by abundant technical and
computational constraints.
Therefore, understanding this sensorimotor
integration in healthy humans, in comparison to
human disease conditions, which particularly impair
the integration of head-based sensory information in
motor control, may be considered essential to future
developments in several fields of science:
- A model that can emulate healthy and
degenerative brain diseases may help to
understand analogies in neuroanatomical and
physiological networks so that tools for
diagnosis, progression monitoring, and effect
graduation of possible targeted therapies for
specific aspects of the degenerating neural
network might be developed.
- For humanoid robotics, a functional model
with known weak points similar to human
disease conditions may help to develop a
robust computational framework to integrate
sensor arrays remote to the main robot body,
analog to the human head. This may
indirectly open the main robotic body space
for other systems, like advanced propulsion
or increased payload.
1.2 State of the Art
The modeling of posture control as a dynamic system
is widespread in the analysis of human experiments
and humanoid robotics. There is no consent about
how the "actual human control system" is, and
various approaches are proposed in the literature,
depending on the analyzed task and the question
under investigation. Usually, models describe the
system as an inverted pendulum (single or multiple)
where the joint torques are controlled (Hettich et al.,
2014; Maurer et al., 2006; Thomas Mergner, 2010;
Peterka, 2002); other models include muscle activity
(Souza et al., 2022) and tendon dynamics (Loram et
al., 2004, 2005b, 2005a; P. G. Morasso & Schieppati,
1999) specifically. The effort in designing the
controller can be oriented toward representing the
biomechanics (Alexandrov et al., 2017, 2015),
investigating some neurological processes such as
sensor fusion (Thomas Mergner, 2010; Peterka,
2002), or a more general model of human neural
control (Jafari et al., 2019; McNeal & Hunt, 2023), or
based on some optimization (Atkeson & Stephens,
2007; Jafari & Gustafsson, 2023; Kuo, 2005). While
A Dynamic Computational Model of Head Sway Responses in Human Upright Stance Postural Control During Support Surface Tilt
19
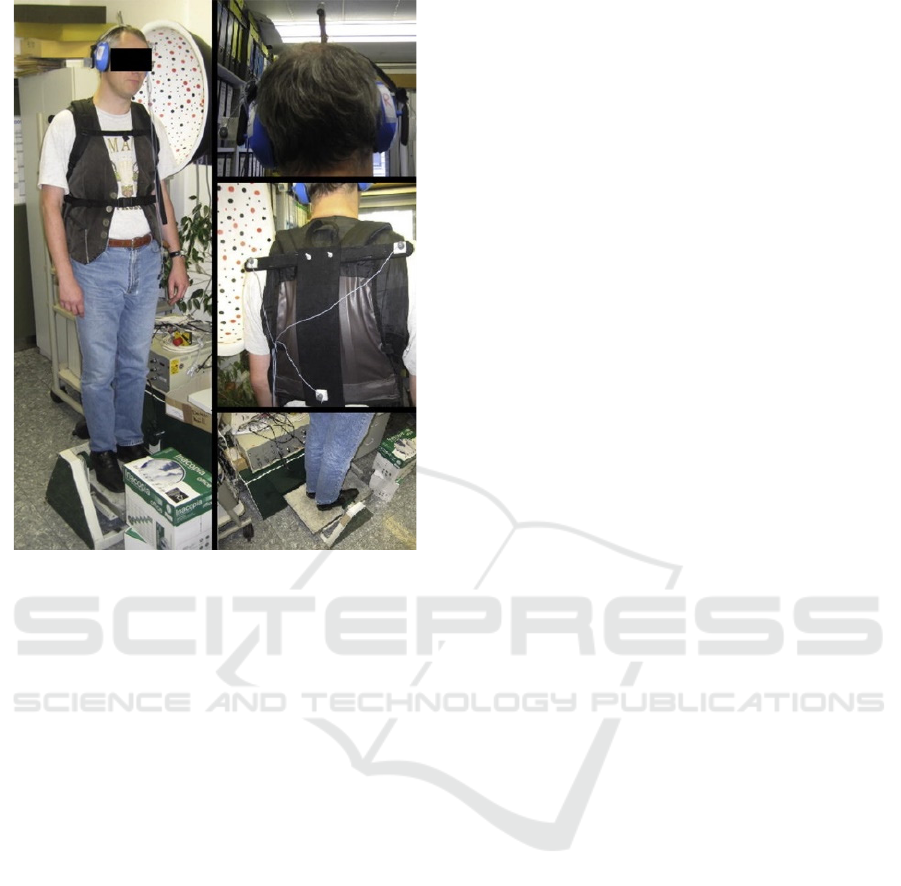
Pictures from Kammermeier et al. (2018).
Figure 3: The experimental setup: the test subject stands on
a tilting platform. The subject's feet were placed within
marked positions, with the heels together and the tips spread
15° apart, while the arms hung loosely by the sides.
the optimization provides an interesting insight into
why the subjects may behave in a certain way and, by
definition, optimized controls for humanoids, the
optimal control is rarely totally human-like as human
behavior is reasonably the result of a trade-off
between typical control system requirements as
tracking precision and energy efficiency and
biological peculiarities that are less obvious from the
engineering point of view such as reducing the effort
of the nervous system or dealing with the fear of
falling.
In general, the more a task is complicated, the
more degrees of freedom are involved; for example,
quiet stance can be modeled with a single inverted
pendulum where the body sway is controlled by ankle
torque (P. Morasso et al., 2019) at least to predict
center of mass (COM) sway. However, there is a
small activity of other joints (Pinter et al., 2008).
Applying optimization to the compensation of
disturbances (push) of different amplitudes reveals
the emergence of strategies involving more joints,
going for ankle strategies for small pushes to knee
bend for larger ones, passing through hip-ankle
strategies for stimuli in between (Atkeson &
Stephens, 2007). As anticipated above, the control of
the neck is not common in literature, as usually, the
upper body is considered altogether and referred to as
HAT (head, arms, and trunk). In (Kilby et al., 2015),
kinematic 3D models with different numbers of
degrees of freedom (ranging from 1 to 7) for posture
control are proposed for the analysis of different tasks
recorded with subjects, i.e., quiet standing, standing
on foam, and standing on one leg. The simple model
has just the ankle joint, while the most complex has
ankles, knees, hips, and neck. No control system is
proposed, and the analysis is performed on the
variance of joint angles. The results show that the
model with the neck (7 DOF) is the most accurate in
fitting the sway of the center of mass and confirm that
with increasingly difficult tasks (standing on foam is
more demanding than quiet standing on a firm
surface, and standing on one leg is even more
difficult). This suggests that including the neck in the
control system can be beneficial in understanding
human posture control in the general case.
In this paper, the focus is on the neck with the
twofold objective of, on the one hand, exploring how
the DEC model can be extended with an additional
degree of freedom and testing whether the modularity
of the DEC control can be applied to study local
characteristics of the control, e.g., in this case, the
stiffness of the neck, and, on the other hand, provide
a tool for the specific analysis of PSP and IPD
patients.
2 MATERIALS AND METHODS
2.1 Clinical Experimental Data
The proposed model emulates the 3D motion analysis
data obtained from three groups of human subjects.
The overall setup is described in detail in
Kammermeier et al. 2018; here, 19 healthy elderly
subjects are considered. All participants gave written
informed consent, and data was anonymized at study
inclusion following the Helsinki Declaration and the
local ethics committee (142/04; Ethikkommission der
Medizinischen Fakultät).
All subjects were placed on a remotely
controllable platform (Toennis) as shown in Fig. 3,
allowing a front-to-back tilt through the ankle joint
axis. The stimulation paradigm involved a resting
condition and small-angle (0.5° and-1°) rotational
disturbances with multiple superimposed sinusoidal
frequencies (0.05-2.2Hz) for 60 seconds; each
maximum angular displacement was tested in eyes
open EO and eyes closed EC conditions.
ICINCO 2023 - 20th International Conference on Informatics in Control, Automation and Robotics
20

3D motion capture was performed with
ultrasound receivers (Zebris 3D) and re-sampled to
100Hz. The sensors placement is shown in Fig. 4 The
final dataset included the platform motion track and
the position signals of three markers for the head,
three for the chest, one for the lower spine, and one
each at the knees along the time domain.
2.2 Posture Control Model
e Control Model is based on the disturbance
identification and compensation (DEC) principle
(omas Mergner, 2010) and its implementation as a
modular control system (Hettich et al., 2014; Lippi et
al., 2016; Lippi & Mergner, 2017). e DEC is based
on the hypothesis of a servo controller for body
position (Merton, 1953), complemented with the
estimation and compensation of external disturbances
based on sensory input (T Mergner et al., 1997;
omas Mergner & Rosemeier, 1998). e servo
controller is implemented as a PD, proportional
derivative controller. e compensation, which
generally includes support surface tilt and
acceleration, gravity, and external push, here is
considered only for gravity and support surface tilt.
Such compensation is implemented in a
Störgrößenaufschaltung fashion, literally meaning
disturbance control in German, i.e., a feed-forward
compensation of disturbances based on sensory input
that allows us to estimate the disturbance itself
(Bleisteiner et al., 1961). e DEC controller is
mainly used to predict steady-state responses, unlike
other models oriented to transient responses (e.g.,
Allum & Honegger, 1992; Küng et al., 2009).
e Control Equations regulating the action of
the servo controller for the neck are:
Active Torque
𝜏
=(𝐾
+ 𝐾
𝑑
𝑑𝑡
) (𝜀+ 𝐺
)
(1)
Passive Torque
𝜏
=(𝐾
+ 𝐾
𝑑
𝑑𝑡
) (𝛼
)
(2)
Gravity
Compensation
𝐺
=𝐾
𝜗
(𝛼
)
(3)
Support Surface
Tilt Compensation
𝛼
=𝛼
+𝛼
−𝛼
(4)
Where 𝐾
a n d 𝐾
are the coefficients of the PD
controller, 𝜀 the error on the controlled variable that
can be the estimated head in space position 𝛼
from
(4) or 𝛼
, the angle between head and trunk, and 𝐺
is the estimated gravity torque from (3). Expressing
the disturbance as an additional input for the PD
exploits the derivative as an anticipation effect. In
robotics applications, the compensation can have its
own PD parameter to allow for fine control (Ott et al.,
2016), here only a PD according to previous works
where the DEC is used to model human responses
(e.g., Georg Hettich et al., 2014; omas Mergner et
al., 2009). 𝐾
and 𝐾
are the passive stiffness and
damping associated with the neck. 𝛼
in (3) and (4)
is the head-in-space angle (with respect to the
gravitational vertical) that here is assumed to come
from the vestibular system without any modeled
noise. 𝐾
is a coefficient associated with gravity (that
usually, in humans, is slightly under-compensated,
taking into account the additional torque produced by
the servo loop). e function 𝜗
() is a dead-zone
nonlinearity defined as
𝜗
(𝛼)=
𝛼+𝜃
𝛼<−𝜃
0−𝜃
<𝛼<𝜃
𝛼−𝜃
𝛼>𝜃
(5)
Where the threshold 𝜃
is a non-negative
parameter, the estimation of support surface tilt is
affected by a nonlinearity also reflected in the
estimated 𝛼
in (4). Specifically, the foot-in-space
estimation is performed by fusing the vestibular
angular velocity signal with the proprioception of all
the joints from the head to the ankle, a nonlinear
function 𝜗
() with the same formal expression of (5)
and another threshold 𝜃
is then applied to the
resulting velocity signal. Here, as the proprioception
and vestibular signals are modeled as ideal, the 𝛼
known from the experiment design (§2.2.) is used to
produce the following estimation
𝛼
= 𝜗
(
𝑑
𝑑𝑡
𝛼
)
𝑑𝜏
(6)
Where 𝑡
is the current time and the initial
condition of the estimator is assumed to be 𝛼
=0.
Again for the assumption of ideal proprioceptive
signals, the error 𝛼
−𝛼
is propagated directly to
𝛼
, leading to eq. (4). e nonlinearity 𝜗
()
explains the fact observed in subjects that smaller
stimuli are associated with larger gains in the
responses (Hettich et al., 2011). Although introducing
an error in the tracking of body sway that prevents
asymptotic stability, the dead band does not make the
system unstable; in fact, it can be demonstrated that
the system is Lyapunov stable (Lippi & Molinari,
2020).
A Dynamic Computational Model of Head Sway Responses in Human Upright Stance Postural Control During Support Surface Tilt
21
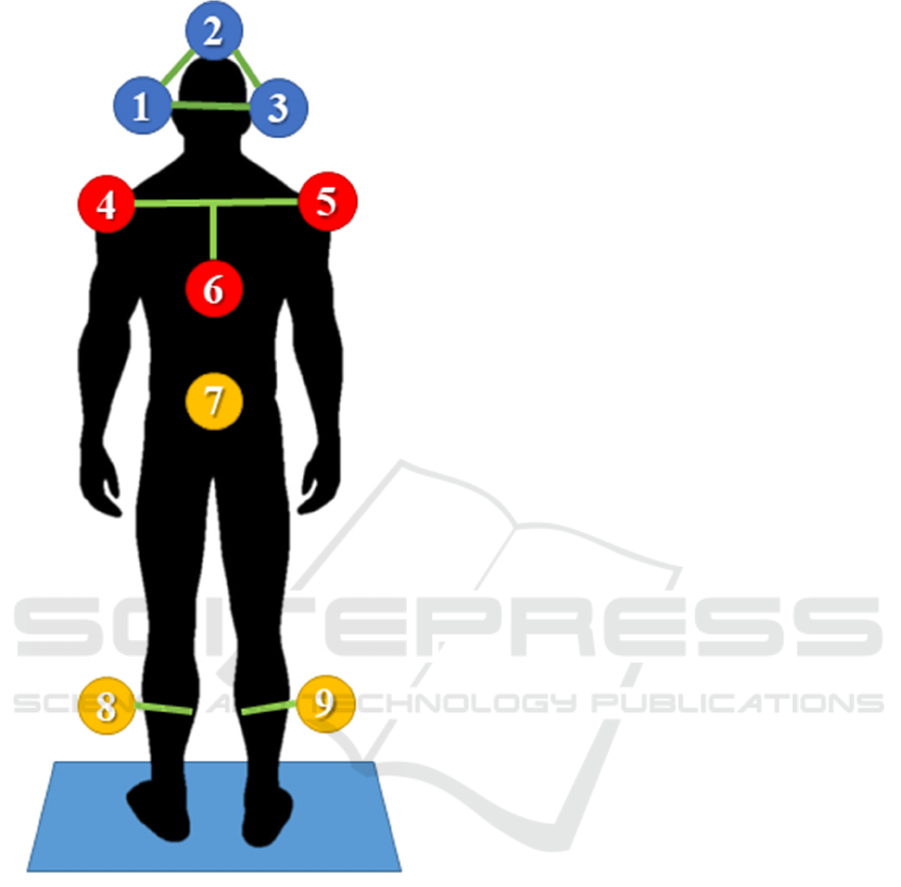
Figure 4: 3D ultrasound position markers (Zebris system)
placement: head (1,2,3), upper chest (4,5,6), hip (7) and
lateral femoral epicondyles (8,9).
A lumped delay ∆𝑡 representing all the delays in
the loop affects the active control (it is in series with
the PD). e sources of the delay are the sensory input
and the motor control. For the control of the ankle,
they are usually estimated to be between 80 and 200
ms, depending on the subject and the test conditions
(Antritter et al., 2014; Li et al., 2012; Molnar et al.,
2021). In general, the delay of peripheral body joints
is expected to be larger than the one associated with
joints closer to the brain, e.g., the delay in the control
loop of the hip is smaller than the one of the ankle
(e.g., 70 ms and 180 ms respectively in G Hettich et
al., 2011). is suggests that the delay in the neck
control loop will be smaller (as confirmed in the
Results §3). Delay is an important parameter as it is
observed that an added delay of about 70 – 80 ms can
already be perceived (Morice et al., 2008) and can
degrade the performance in tracking tasks (Lippi et
al., 2010) and; hence it is reasonably one of the
parameters characterizing the performance also in
posture control as suggested by (Li et al., 2012;
Lockhart & Ting, 2007; Molnar et al., 2021; Van Der
Kooij et al., 1999; Vette et al., 2010). Furthermore,
delay appears to be a determining factor in the
different performances between young and elderly
subjects (Davidson et al., 2011; Qu et al., 2009).
A schema of the simulated system with an
overview of the DEC control, including the simulated
dynamic system, is shown in Fig. 1.
e Dynamic of the Head is simulated as a single
inverted pendulum (SIP) characterized by the weight
and the moment of inertia of the head on which the
active toques 𝜏
and 𝜏
from (1) and (2). e
translation produces a further effect due to the sway
of the legs and the trunk resulting in the following
dynamic system, where the small angle
approximations sin𝛼𝛼 and cos𝛼=1 are
applied:
⎩
⎨
⎧
𝛼
=𝛼
𝛼
=𝜏
+𝜏
+𝐺+𝑇
/𝐽
𝐺= 𝑚
𝑔ℎ
𝛼
𝑇
=
(
𝛼
𝑙
+𝛼
𝑙
)
ℎ
𝑚
(7)
where 𝐽
is the head moment of inertia, 𝑚
i s t h e
head mass, ℎ e is the height of the head center of
mass, and 𝑔=9.81 𝑚/𝑠
is the gravity acceleration
constant. 𝑙
and 𝑙
are the lengths of the trunk and leg
segments, respectively. A standard set of
anthropometric parameters (De Leva, 1996; Winter,
2009) is used in all the simulations with no specific
adaptation to the single subject. Anthropometric
parameters are reported in Table 1. e full dynamic
system is shown in detail in Fig. 2.
2.3 The Dataset
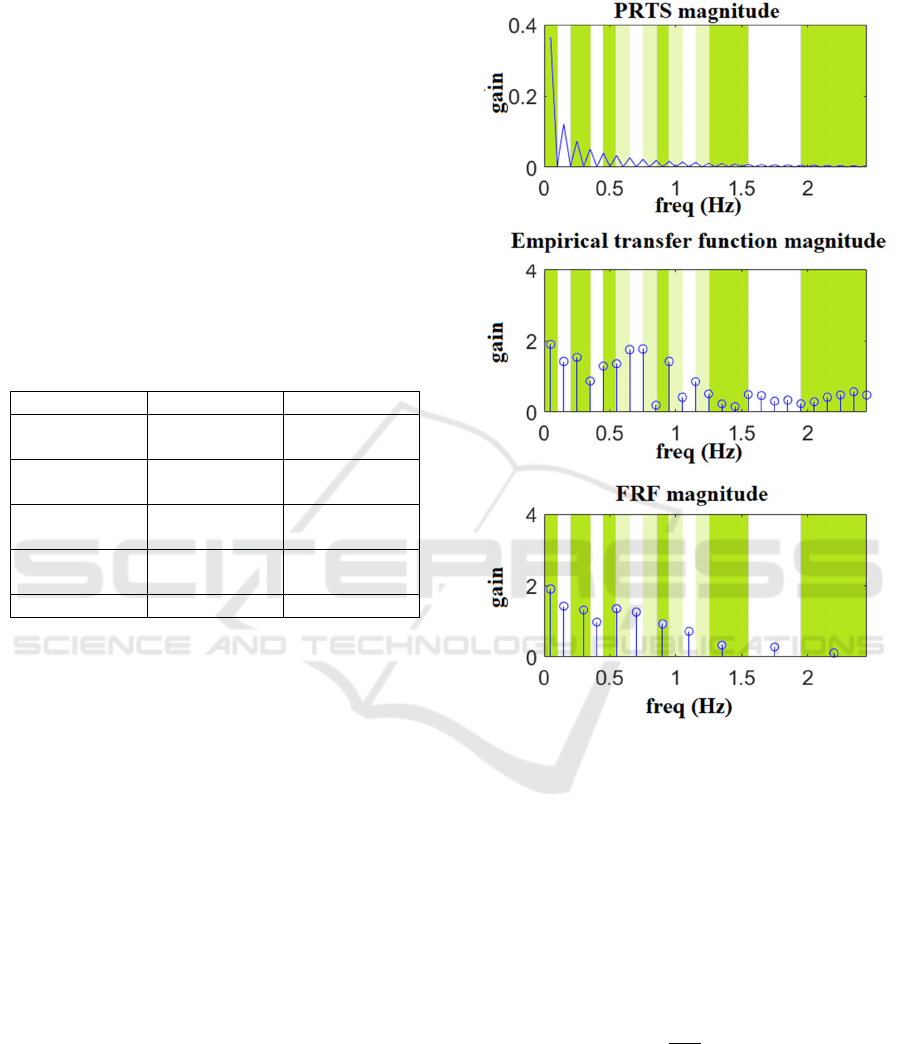
e Frequency Response Function, FRF, is an
empirical transfer function between the stimulus and
the body sway. e input support surface tilt has a
Pseudo Random Ternary Sequence (PRTS) profile
(Peterka, 2002). e fact that the system is pseudo-
random prevents the subjects from using prediction,
as it is expected that the user can learn the sequence
(omas Mergner, 2010). However, a study
(Assländer et al., 2020) suggests that the adaptation
observed in subjects after repeating the experiments
ICINCO 2023 - 20th International Conference on Informatics in Control, Automation and Robotics
22
may be due to learning the dynamics of the body in
the experimental scenario, as they occur both with
pseudo-random and rhythmic stimuli. Robotic
experiments showed how DEC could improve
performance when integrating an online learning
system to predict future disturbances (Lippi, 2018). In
the presented model, no prediction or learning will be
taken into account. e peak-to-peak amplitudes used
in the presented experiments are 0.5° and 1°. e
PRTS power spectrum has a profile with peaks
separated by ranges of frequencies with no power
(Joseph Jilk et al., 2014; Lippi et al., 2020; Peterka,
2002). e response is evaluated for specific
frequencies where the PRTS spectrum has peaks (see
Fig. 5, top). e FRF is computed with the Fourier
transform of the input U and the output Y as
Table 1: Anthropometric parameters used in all the
simulations.
Parameter Symbol Value
Head moment
of inertia
𝐽
0.4797 kg/m
Leg length
(ankle to hip)
𝑙
0.8543 m
Trunk length
(hip to neck)
𝑙
0.5011 m
Head COM
height
ℎ
0.2053 m
Head mass 𝑚
4.5 kg
where 𝐺
=𝑈∗𝑌 and 𝐺
=𝑈∗𝑈 are empirical
estimations of the cross-power spectrum and the input
power spectrum (∗ is the element-wise product). e
spectrum is then transformed into a vector of 11
components by averaging the FRF over neighboring
ranges of frequencies, as illustrated in Fig. 5. e
choice of the frequencies and their overlapping
follows the method described in (Peterka, 2002), but
here is adapted to the 11 frequencies considered as the
PRTS used here is shorter in time (one cycle is 20
seconds, and the signal is repeated three, in contrast
to the six cycles of 60.5 s of the original work). e
averaging was initially proposed to obtain a
visualization with the frequencies almost equally
spaced on a logarithmic scale, typically used to plot
the FRF. e final representation of the FRF is a
function of the 11 frequencies
𝒇=
0.1,0.3,0.6,0.8,1.1,1.4,1.8,2.2,2.7,3.5,4.4
𝐻𝑧
Notice that a transfer function represents a linear
system input-output relationship assuming no
transient effect due to initial conditions. It is known
that human postural responses are nonlinear (e.g., see
sensory reweighting in Assländer & Peterka, 2016),
so the FRF is intended as a representation of the
output of a trial and not as a general model for the
subject.
Figure 5: Spectrum and example of FRF. Above: The
magnitude of the DFT of the PRTS. Center: empirical
transfer function from (8). Below: FRF resulting from the
averaging of frequency bands. The bands on the
background show the frequency ranges over which the
spectrum is averaged: white and dark green represent
ranges associated with groups of frequencies. The sets of
frequencies overlap, with light green bands belonging to
both contiguous groups, and a sample on the transition
between two bands belongs to both groups. As the FRF is
averaged in the complex domain, the average shown in the
plot is not the average of the magnitudes.
𝐻=
𝐺
𝐺
(8)
2.4 Fitting the Model
e model fits the data using a numeric research
algorithm (Lagarias et al., 1998) implemented by the
A Dynamic Computational Model of Head Sway Responses in Human Upright Stance Postural Control During Support Surface Tilt
23
Matlab function fminsearch.
e objective function to be minimized is the
difference between the FRF from the experimental
trial and the one produced by the simulation. e
threshold 𝜃
is set to 0.065 rad/s, as Georg Hettich
et al. (2014) reported. Some variations of the model
have been tested, specifically: i. a linear model with
no dead bands (𝜃
=0 , and 𝜃
=0 ), ii. a model
with no dead band on gravity (𝜃
=0.065 , and
𝜃
=0), and iii. a model where the threshold 𝜃
was
unknown a priori and considered a parameter to be
selected to fit the model. e best model, in the sense
of having the smallest fitting error on average, was ii.
is may sound paradoxical as the model iii. includes
the possibility of setting 𝜃
=0; hence, it is expected
to perform at least equally to ii. e problem is that
adding one free parameter can sometimes decrease
the performance of fminsearch. Specifically, in
this setup, the gain nonlinearity introduced by the
dead bands may not be easy to distinguish from the
effect of the control gains.
It should be noted that the linear model can
reproduce the nonlinear response (compare the
different gains associated with the two different
amplitudes in Fig. 6) as the parameters are optimized
for each trial separately, showing a reweighting in
different conditions. e introduction (6) improves
the average result. It leads to a smaller variance in the
gains parameters suggesting that it can explain the
nonlinear response "automatically," as shown more in
detail in the next section.
In the following model ii. is discussed, and the
identified parameters are 𝐾
, 𝐾
from (1), 𝐾
, 𝐾
from (2), 𝐾
from (3), and the lumped delay ∆𝑡.
3 RESULTS
The average and the standard deviation parameters
for the different conditions, i.e., Eyes closed (EC),
eyes open EO, and peak-to-peak amplitudes of 0.5°
and 1°, are reported in Table 2. In the following, the
error consists of the norm of the difference between
the FRFs of the data and the simulated model. For this
reason, it has no unit of measure being a ratio between
angles as the FRFs.
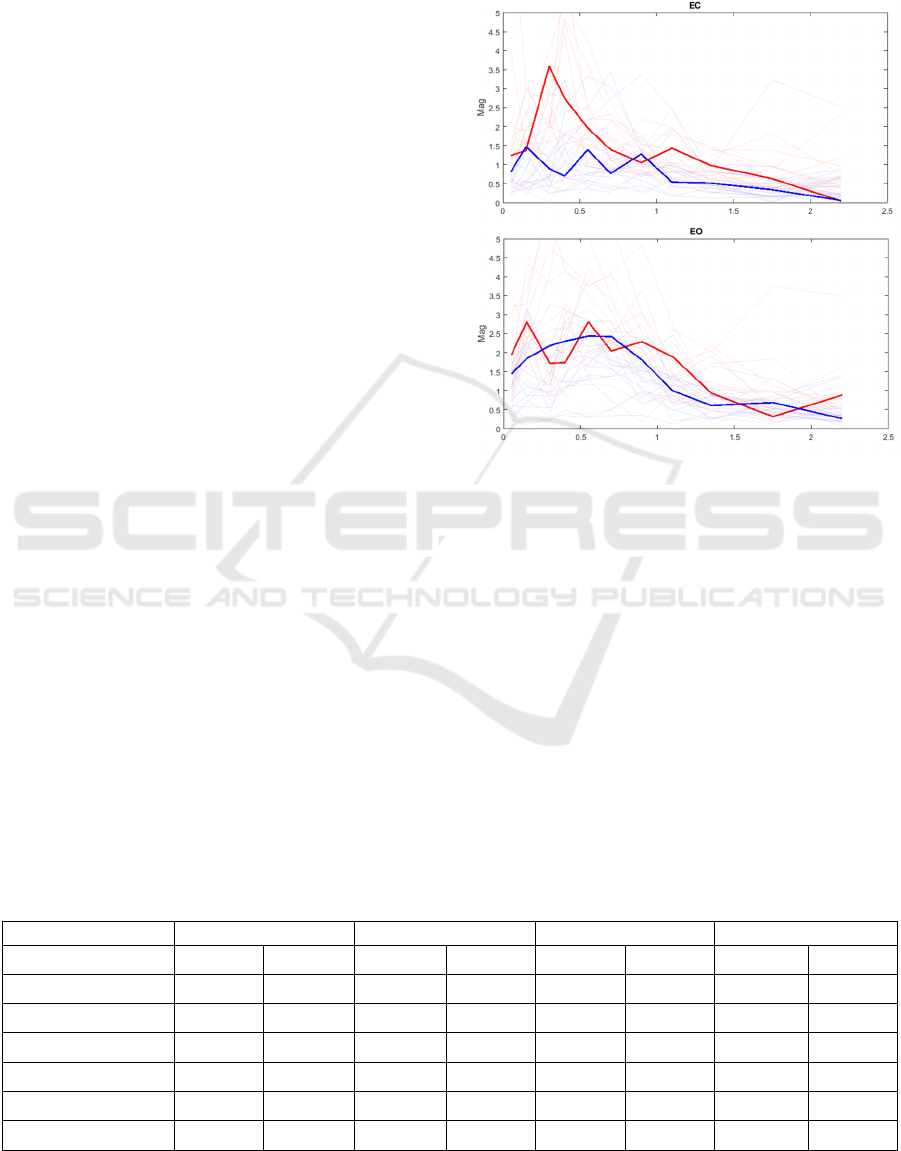
Figure 6: Average FRF magnitude for eyes closed (above)
and eyes open (below) conditions. The red line is the
response to 0.5°, and the blue line to 1°. The transparent
lines on the background represent FRFs from single trials.
The average is performed in a complex domain. The effect
of the nonlinearity is evident with eyes closed: the gain is
larger with the smaller stimulus that is under-compensated
due to the effect of the thresholds as demonstrated in (Lippi
& Molinari, 2020)
There is a significant difference in passive
stiffness between the response to the stimuli of 0.5
and 1° amplitudes with EC (𝐾
was larger at 0.5°
with p=0.04 tested with ANOVA). In contrast, the
difference was smaller and not significant for EO
(p=0.24). Slightly modified models have fit for
comparison, and the detailed report of such fits goes
beyond the space allowed for this work. The result
Table 2: Results of model fit for different visual conditions (EC, EO) and peak-to-peak (pp) amplitudes.
EC pp 0.5° EC pp 1° EO pp 0.5° EO pp 1°
Paramete
r
mean
s
td mean Std mean
s
td mean Std
𝑲
𝑷
[Nm/rad]
11.129 10.34 7.1597 1.1701 8.4829 5.2197 5.5033 1.7324
𝑲
𝑫
[Nms/rad]
1.5208 1.465 1.1701 0.91631 1.5034 0.85115 1.5213 0.8278
𝑲
𝑷𝑷
[Nm/rad]
12.379 9.8733 6.9293 4.6557 13.583 11.079 10.139 5.3557
𝑲
𝑷𝑫
[
Nms/rad]
3.3978 3.1578 3.7765 3.0908 2.3834 1.1103 2.4437 0.85655
𝑲
𝑮
1.049 0.49004 0.8516 0.56258 0.90084 0.45227 0.96701 0.36248
∆𝒕
[s]
0.060489 0.040352 0.085444 0.061062 0.036357 0.028749 0.053899 0.017607
ICINCO 2023 - 20th International Conference on Informatics in Control, Automation and Robotics
24

can be summarized as follows: The linear model
(with no dead-bands produces a larger error (2.7
compared to 2.1 of the final model) and a larger
variance in the parameters (1.7) compared to the final
model (1.4). A model where the proprioceptive
variable (head-to-trunk angle 𝛼
) was used instead
of head-in-space 𝛼
as the control variable has
produced worse results on average. e standard
deviation of the proportional gains, both active (𝐾
)
and passive (𝐾
), is relatively large in the group of
responses associated with 0.5°, especially for the EC
case. is may be because when the oscillations of the
trunk are small, the effect of those two gains is
difficult to distinguish as 𝛼
≅𝛼
.
4 DISCUSSION CONCLUSIONS
AND FUTURE WORK
The model that produced the best fit included the dead
band nonlinearity from eq (6) but not the one on the
gravity compensation. It is interesting to notice that
the evident difference between EO and EC (see Fig.
6) is not reflected by a significant difference in the
parameters in the neck control. This suggests that the
differences in behavior between EC and EO are
expressed in the sway of the trunk and the leg
segments that affect the head as an input. The more
relevant difference observed in parameters is the
larger stiffness with small oscillations, suggesting
that, with 0.5°, the head is moving with the trunk.
These considerations suggest, on the one hand, that
the DIP model is enough to predict the behavior of the
upper body in healthy subjects (at least for the small
oscillations considered). On the other hand, modeling
the behavior of the neck may be beneficial for
applications where head movements are involved
explicitly, e.g., when the DEC is applied to an
assistive device (Lippi & Mergner, 2020) if the
device supports the head as well (e.g., an active
version of Garosi et al., 2022). The patient's behavior
is currently under investigation.
Models for perturbed posture control are used to
explain the differences in body sway responses in
terms of meaningful parameters, for example, sensory
weighting in different conditions (Assländer &
Peterka, 2014) or different subject characteristics
such as stiffness or delay (A. Goodworth et al., 2023).
In particular, the possibility to exploit the modularity
of the DEC control to identify parameters relative to
different joints will be used to identify differences
between normal and pathological behavior expressed
locally, e.g., see if the neck is stiffer in a group of
patients.
The application to a bioinspired humanoid control
system of the proposed neck model is
straightforward: the up-channeled 𝛼
value can be
provided by the sensor fusion between the neck
proprioceptive input (encoder) and the output of the
module controlling the trunk 𝛼
as specified in
(Lippi & Mergner, 2017).
In this work, the fit of the model was performed
with small amplitudes that are safe for patients (hence
in the range of interest for future experiments). Future
improvement in the model's validation can be
achieved by integrating experiments with larger
amplitudes. This may reveal nonlinear effects that are
not visible with small head movements and, by
producing larger trunk sways, allow for better
differentiation between the effects of active and
passive stiffness. For example, the gravity threshold
that was not relevant in these experiments may
become more visible.
REFERENCES
Alexandrov, A. V., Lippi, V., Mergner, T., Frolov, A. A.,
Hettich, G., & Husek, D. (2017). Human-inspired
Eigenmovement concept provides coupling-free
sensorimotor control in humanoid robots. Frontiers in
Neurorobotics, 11(APR). https://doi.org/10.3389/
fnbot.2017.00022
Alexandrov, A. V, Frolov, A. A., Horak, F. B., Carlson-
Kuhta, P., Park, S., Audren, H., Vaillant, J., Kheddar,
A., Escande, A., Kaneko, K., Yoshida, E., Elhasairi, A.,
Pechev, A., Faraji, S., Colasanto, L., Ijspeert, A. J.,
Gams, A., den Kieboom, J., Dzeladini, F., … Abiko, S.
(2015). Biologically inspired kinematic synergies
provide a new paradigm for balance control of
humanoid robots. Robotics and Automation, 2001.
Proceedings 2001 ICRA. IEEE International
Conference On, 2(5), 4030–4035.
Allum, J. H. J., & Honegger, F. (1992). A postural model
of balance-correcting movement strategies. Journal of
Vestibular Research, 2(4), 323 – 347.
https://doi.org/10.3233/ves-1992-2406
Antritter, F., Scholz, F., Hettich, G., & Mergner, T. (2014).
Stability analysis of human stance control from the
system theoretic point of view. Control Conference
(ECC), 2014 European, 1849–1855. https://doi.org/10.
1109/ECC.2014.6862198
Assländer, L., Gruber, M., & Giboin, L. S. (2020).
Reductions in body sway responses to a rhythmic
support surface tilt perturbation can be caused by other
mechanisms than prediction. Experimental Brain
Research, 238(2). https://doi.org/10.1007/s00221-020-
05723-z
A Dynamic Computational Model of Head Sway Responses in Human Upright Stance Postural Control During Support Surface Tilt
25

Assländer, L., & Peterka, R. J. (2014). Sensory reweighting
dynamics in human postural control. Journal of
Neurophysiology, 111(9). https://doi.org/10.1152/
jn.00669.2013
Assländer, L., & Peterka, R. J. (2016). Sensory reweighting
dynamics following removal and addition of visual and
proprioceptive cues. Journal of Neurophysiology.
https://doi.org/10.1152/jn.01145.2015
Atkeson, C. G., & Stephens, B. (2007). Multiple Balance
Strategies From One Optimization Criterion.
Proceedings of the 2007 7th IEEE-RAS International
Conference on Humanoid Robots, HUMANOIDS 2007,
57–64. https://doi.org/10.1109/ICHR.2007.4813849
Bleisteiner, G. V., Mangoldt, W., Henninger, H., & Oetker,
R. (1961). Handbuch der Regelungstechnik. Springer.
Davidson, B. S., Madigan, M. L., Southward, S. C., &
Nussbaum, M. A. (2011). Neural control of posture
during small magnitude perturbations: Effects of aging
and localized muscle fatigue. IEEE Transactions on
Biomedical Engineering, 58(6). https://doi.org/10.1
109/TBME.2010.2095500
De Leva, P. (1996). Adjustments to Zatsiorsky-seluyanov's
segment inertia parameters. Journal of Biomechanics,
29(9). https://doi.org/10.1016/0021-9290(95)00178-6
Dieterich, M., & Brandt, T. (2019). Perception of verticality
and vestibular disorders of balance and falls. Frontiers
in Neurology, 10(APR). https://doi.org/10.3389/
fneur.2019.00172
Garosi, E., Mazloumi, A., Jafari, A. H., Keihani, A.,
Shamsipour, M., Kordi, R., & Kazemi, Z. (2022).
Design and ergonomic assessment of a passive
head/neck supporting exoskeleton for overhead work
use. Applied Ergonomics, 101. https://doi.org/
10.1016/j.apergo.2022.103699
Goodworth, A. D., & Peterka, R. J. (2018). Identifying
mechanisms of stance control: a single stimulus
multiple output model-fit approach. Journal of
Neuroscience Methods, 296, 44–56. https://doi.
org/10.1016/j.jneumeth.2017.12.015
Goodworth, A., Felmlee, D., & Karmali, F. (2023).
Variation between individuals in sensorimotor
feedback control of standing balance. Journal of
Neurophysiology, 130(2), 303–318. https://doi.
org/10.1152/jn.00353.2022
Hettich, G., Assländer, L., Gollhofer, A., & Mergner, T.
(2014). Human hip-ankle coordination emerging from
multisensory feedback control. Human Movement
Science. https://doi.org/10.1016/j.humov.2014.07.004
Hettich, G., Fennell, L., & Mergner, T. (2011). Double
Inverted Pendulum Model of Reactive Human Stance
Control. Multibody Dynamics 2011.
Hettich, G., Lippi, V., & Mergner, T. (2015). Human-Like
Sensor Fusion Implemented in the Posture Control of a
Bipedal Robot. In Neurotechnology, Electronics, and
Informatics (pp. 29–45). Springer. https://doi.
org/10.1007/978-3-319-15997-3_3
Hettich, G., Lippi, V., & Mergner, T. (2013). Human-like
sensor fusion mechanisms in a postural control robot.
NEUROTECHNIX 2013 - Proceedings of the
International Congress on Neurotechnology,
Electronics and Informatics, 152–160.
https://doi.org/10.5220/0004642701520160
Jafari, H., & Gustafsson, T. (2023). Optimal controllers
resembling postural sway during upright stance. PLOS
ONE, 18(5), 1–23. https://doi.org/10.1371/journal.
pone.0285098
Jafari, H., Nikolakopoulos, G., & Gustafsson, T. (2019).
Stabilization of an inverted pendulum via human brain-
inspired controller design. IEEE-RAS International
Conference on Humanoid Robots. https://doi.
org/10.1109/Humanoids43949.2019.9035019
Joseph Jilk, D., Safavynia, S. A., & Ting, L. H. (2014).
Contribution of vision to postural behaviors during
continuous support-surface translations. Experimental
Brain Research. https://doi.org/10.1007/s00221-013-
3729-4
Kammermeier, S., Maierbeck, K., Dietrich, L., Plate, A.,
Lorenzl, S., Singh, A., Bötzel, K., & Maurer, C. (2018).
Qualitative postural control differences in Idiopathic
Parkinson’s Disease vs. Progressive Supranuclear Palsy
with dynamic-on-static platform tilt. Clinical
Neurophysiology, 129(6). https://doi.org/10.1016/
j.clinph.2018.03.002
Kilby, M. C., Molenaar, P. C. M., & Newell, K. M. (2015).
Models of postural control: Shared variance in joint and
COM motions. PLoS ONE, 10(5). https://doi.
org/10.1371/journal.pone.0126379
Küng, U. M., Horlings, C. G. C., Honegger, F., Duysens, J.
E. J., & Allum, J. H. J. (2009). Control of roll and pitch
motion during multi-directional balance perturbations.
Experimental Brain Research, 194(4). https://doi.
org/10.1007/s00221-009-1743-3
Kuo, A. D. (2005). An optimal state estimation model of
sensory integration in human postural balance. Journal
of Neural Engineering, 2(3). https://doi.org/10.
1088/1741-2560/2/3/S07
Lagarias, J. C., Reeds, J. A., Wright, M. H., & Wright, P.
E. (1998). Convergence properties of the Nelder-Mead
simplex method in low dimensions. SIAM Journal on
Optimization, 9(1). https://doi.org/10.1137/S105262
3496303470
Li, Y., Levine, W. S., & Loeb, G. E. (2012). A two-joint
human posture control model with realistic neural
delays. IEEE Transactions on Neural Systems and
Rehabilitation Engineering, 20(5). https://doi.org/10.
1109/TNSRE.2012.2199333
Lippi, V. (2018). Prediction in the context of a human-
inspired posture control model. Robotics and
Autonomous Systems. https://doi.org/10.1016/j.robot.
2018.05.012
Lippi, V., Avizzano, C. A., Mottet, D., & Ruffaldi, E.
(2010). Effect of delay on dynamic targets tracking
performance and behavior in a virtual environment.
Proceedings - IEEE International Workshop on Robot
and Human Interactive Communication, 446–451.
https://doi.org/10.1109/ROMAN.2010.5598607
Lippi, V., Brands, K. G., & Seel, T. (2020). Real-time
implementation and evaluation of magnetometers
tracking system for human and humanoid posture
control benchmarking based on inertial sensors.
ICINCO 2023 - 20th International Conference on Informatics in Control, Automation and Robotics
26

ICINCO 2020 - Proceedings of the 17th International
Conference on Informatics in Control, Automation and
Robotics, 675–680. https://doi.org/10.5220/0009869
106750680
Lippi, V., & Mergner, T. (2017). Human-derived
disturbance estimation and compensation (DEC)
method lends itself to a modular sensorimotor control
in a humanoid robot. Frontiers in Neurorobotics,
11(SEP). https://doi.org/10.3389/fnbot.2017.00049
Lippi, V., & Mergner, T. (2020). A challenge: Support of
standing balance in assistive robotic devices. Applied
Sciences, 10(15), 5240. https://doi.org/10.3390/
APP10155240
Lippi, V., Mergner, T., Szumowski, M., Zurawska, M. S.,
& Zielińska, T. (2016). Human-inspired Humanoid
Balancing and Posture Control in Frontal Plane. In
ROMANSY 21-Robot Design, Dynamics and Control
(pp. 285–292). Springer, Cham. https://doi.org/10.
1007/978-3-319-33714-2_32
Lippi, V., & Molinari, F. (2020). Lyapunov stability of a
nonlinear bio-inspired system for the control of
humanoid balance. ICINCO 2020 - Proceedings of the
17th International Conference on Informatics in
Control, Automation and Robotics, 726–733.
https://doi.org/10.5220/0009970307260733
Lockhart, D. B., & Ting, L. H. (2007). Optimal
sensorimotor transformations for balance. Nature
Neuroscience, 10(10). https://doi.org/10.1038/nn1986
Loram, I. D., Maganaris, C. N., & Lakie, M. (2004).
Paradoxical muscle movement in human standing.
Journal of Physiology, 556(3). https://doi.org/10.
1113/jphysiol.2004.062398
Loram, I. D., Maganaris, C. N., & Lakie, M. (2005a).
Active, non-spring-like muscle movements in human
postural sway: How might paradoxical changes in
muscle length be produced? Journal of Physiology,
564(1). https://doi.org/10.1113/jphysiol.2004.073437
Loram, I. D., Maganaris, C. N., & Lakie, M. (2005b).
Human postural sway results from frequent ballistic
bias impulses by the soleus and gastrocnemius. Journal
of Physiology, 564(1). https://doi.org/10.1113/
jphysiol.2004.076307
Maurer, C., Mergner, T., & Peterka, R. J. (2006).
Multisensory control of human upright stance.
Experimental Brain Research, 171(2), 231–250.
https://doi.org/10.1007/s00221-005-0256-y
McNeal, J. S., & Hunt, A. (2023). A Simple Dynamic
Controller for Emulating Human Balance Control. In F.
Meder, A. Hunt, L. Margheri, A. Mura, & B. Mazzolai
(Eds.), Biomimetic and Biohybrid Systems (pp. 227–
239). Springer Nature Switzerland.
Mergner, T, Huber, W., & Becker, W. (1997). Vestibular-
neck interaction and transformation of sensory
coordinates. Journal of Vestibular Research :
Equilibrium & Orientation, 7(4), 347–367.
Mergner, Thomas. (2010). A neurological view on reactive
human stance control. Annual Reviews in Control
,
34(2), 177–198. https://doi.org/10.1016/j.arcontrol.
2010.z08.001
Mergner, Thomas, & Rosemeier, T. (1998). Interaction of
vestibular, somatosensory and visual signals for
postural control and motion perception under terrestrial
and microgravity conditions - A conceptual model.
Brain Research Reviews, 28(1–2). https://doi.org/
10.1016/S0165-0173(98)00032-0
Mergner, Thomas, Schweigart, G., & Fennell, L. (2009).
Vestibular humanoid postural control. Journal of
Physiology Paris, 103(3–5), 178–194.
https://doi.org/10.1016/j.jphysparis.2009.08.002
Merton, P. A. (1953). Speculations on the Servo-Control of
Movement. In In Ciba Foundation Symposium - The
Spinal Cord, G.E.W. Wolstenholme (Ed.).
https://doi.org/10.1002/9780470718827.ch18
Molnar, C. A., Zelei, A., & Insperger, T. (2021). Rolling
balance board of adjustable geometry as a tool to assess
balancing skill and to estimate reaction time delay.
Journal of the Royal Society Interface, 18(176).
https://doi.org/10.1098/rsif.2020.0956
Morasso, P., Cherif, A., & Zenzeri, J. (2019). Quiet
standing: The single inverted pendulum model is not so
bad after all. PLoS ONE, 14(3).
https://doi.org/10.1371/journal.pone.0213870
Morasso, P. G., & Schieppati, M. (1999). Can muscle
stiffness alone stabilize upright standing? Journal of
Neurophysiology, 82(3). https://doi.org/10.1152/jn.
1999.82.3.1622
Morice, A. H. P., Siegler, I. A., & Bardy, B. G. (2008).
Action perception patterns in the virtual ball bouncing:
combating system latency and tracking functional
validity. J Neurosci Methods, 1(255), 255–266.
Ott, C., Henze, B., Hettich, G., Seyde, T. N., Roa, M. A.,
Lippi, V., & Mergner, T. (2016). Good Posture, Good
Balance: Comparison of Bioinspired and Model-Based
Approaches for Posture Control of Humanoid Robots.
IEEE Robotics & Automation Magazine, 23(1), 22–33.
https://doi.org/10.1109/MRA.2015.2507098
Pasma, J. H., Assländer, L., van Kordelaar, J., de Kam, D.,
Mergner, T., & Schouten, A. C. (2018). Evidence in
support of the independent channel model describing
the sensorimotor control of human stance using a
humanoid robot. Frontiers in Computational
Neuroscience, 12. https://doi.org/10.3389/fncom.
2018.00013
Peterka, R. J. (2002). Sensorimotor integration in human
postural control. Journal of Neurophysiology.
https://doi.org/10.1152/jn.2002.88.3.1097
Pinter, I. J., Van Swigchem, R., Van Soest, A. J., &
Rozendaal, L. A. (2008). The dynamics of postural
sway cannot be captured using a one-segment inverted
pendulum model: A PCA on segment rotations during
unperturbed stance. Journal of Neurophysiology,
100(6). https://doi.org/10.1152/jn.01312.2007
Qu, X., Nussbaum, M. A., & Madigan, M. L. (2009).
Model-based assessments of the effects of age and
ankle fatigue on the control of upright posture in
humans. Gait and Posture, 30(4).
https://doi.org/10.1016/j.gaitpost.2009.07.127
Souza, T. R., Schallig, W., Veerkamp, K., Magalhães, F.
A., Okai-Nóbrega, L. A., Fonseca, S. T., & van der
A Dynamic Computational Model of Head Sway Responses in Human Upright Stance Postural Control During Support Surface Tilt
27

Krogt, M. M. (2022). Muscle actions on crossed and
non-crossed joints during upright standing and gait: A
comprehensive description based on induced
acceleration analysis. Journal of Biomechanics, 130.
https://doi.org/10.1016/j.jbiomech.2021.110874
Van Der Kooij, H., Jacobs, R., Koopman, B., &
Grootenboer, H. (1999). A multisensory integration
model of human stance control. Biological Cybernetics,
80(5). https://doi.org/10.1007/s004220050527
Vette, A. H., Masani, K., Nakazawa, K., Popovic, M. R., &
Member, S. S. S. S. (2010). Neural-Mechanical
Feedback Control Scheme Fluctuation During Quiet
Stance. Rehabilitation, 18(1).
Winter, D. A. (2009). Biomechanics and Motor Control of
Human Movement: Fourth Edition. In Biomechanics
and Motor Control of Human Movement: Fourth
Edition. https://doi.org/10.1002/9780470549148
Zebenay, M., Lippi, V., & Mergener, T. (2015). Human-
like humanoid robot posture control. ICINCO 2015 -
12th International Conference on Informatics in
Control, Automation and Robotics, Proceedings, 2,
304–309. https://doi.org/10.5220/0005542603040309.
ICINCO 2023 - 20th International Conference on Informatics in Control, Automation and Robotics
28
