
Real Time Orbital Object Recognition for Optical Space Surveillance
Applications
Radu Danescu
1a
, Attila Fuzes
1
, Razvan Itu
1b
and Vlad Turcu
2
1
Computer Science Department, Technical University of Cluj-Napoca, Memorandumului 28, Cluj-Napoca, Romania
2
Astronomical Observatory Cluj-Napoca, Romanian Academy, Ciresilor 19, Cluj-Napoca, Romania
Keywords: Space Surveillance, Real Time Target Identification, Low Earth Orbit.
Abstract: Artificial objects in various orbits surround the Earth, and many of these objects can be found within the low
Earth orbit region (LEO). This orbital zone also contains a significant amount of space debris, which pose a
tangible threat to space operations, necessitating close monitoring. Various sensors can be used for either
tracking, knowing the target’s orbital parameters and observing it for updating them, or for surveillance, which
can also discover new targets. Real time identification of the satellite as it is detected by the surveillance
systems provides a mechanism for selecting the targets for stare and chase applications, to decide if a new
satellite has been discovered, or to identify a satellite that has outdated orbital elements. This paper describes
a system capable of real time surveillance and satellite identification using limited computing power. The
system relies on detecting trajectory endpoints at discrete time intervals, and then using these endpoints for
frame by frame trajectory prediction, which is then matched with detected tracklets. This way, the tracklets
are identified in real time. The system has been tested by surveying real satellites, in real time, and the
identification mechanism proved to work as expected.
1 INTRODUCTION
Artificial objects in various orbits surround the Earth,
and many of these objects can be found within the low
Earth orbit region (LEO), typically at altitudes below
2000 km. Besides useful satellites, this orbital zone
contains space debris, which pose a tangible threat to
space operations, necessitating close monitoring.
Many of the LEO satellites’ orbital parameters are
stored in the Space-Track catalogue (SpaceTrack,
2023), which is maintained by the Space Fence Radar
system (Haimerl, 2015, and LockheedMartin, 2022).
While the radar sensors are highly accurate and
can track small objects even in adverse weather
conditions, they are expensive to set up and operate.
Optical sensors, on the other hand, are cheaper, have
a highly accurate angular resolution, and can be easily
deployed all over the world. The sensor can be used
either for tracking, knowing the target’s orbital
parameters and observing it for updating them, or for
surveillance, which can also discover new targets.
a
https://orcid.org/0000-0002-4515-8114
b
https://orcid.org/0000-0001-8156-7313
The sensors used for tracking have narrow fields of
view (FOV) and large focal lengths, while the sensors
used for surveillance have wider field of view and
shorter focal lengths.
Some algorithms rely on a priori knowing the
expected trajectory of the satellite, such as the
approach presented in (Levesque, 2007), which relies
on background modelling and subtraction using a
polynomial intensity model, combined with star
removal and matched filters for streak detection, or a
similar approach, presented in (Vananti, 2015),
employs background modelling and subtraction, and
convolution with shaped kernels for streak detection.
When the trajectory is not known, the algorithms
try to detect generic linear shapes in the image. Such
generic structures can be detected using the Radon
transform, which can be combined with matched
filters, as in (Hickson, 2018), or combined with an
intensity profile along the emphasized line (Ciurte,
2014). The linear shape of the streak can be
highlighted also by the Hough transform, a popular
562
Danescu, R., Fuzes, A., Itu, R. and Turcu, V.
Real Time Orbital Object Recognition for Optical Space Surveillance Applications.
DOI: 10.5220/0012158800003543
In Proceedings of the 20th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2023) - Volume 1, pages 562-569
ISBN: 978-989-758-670-5; ISSN: 2184-2809
Copyright © 2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)

line matching technique. This approach is used in
(Wijnen, 2019) and in (Diprima, 2018), where it is
combined with morphological operations. RANSAC,
a method for stochastic fitting of lines, was also used
in combination with the Hough transform by (Wijnen,
2019). The streaks can also be identified through
thresholding and connected components analysis for
specific geometric properties, as in (Virtanen, 2016),
(Kim, 2016). Another characteristic of the satellite
streaks is that they tend to have a colinear trajectory in
successive frames. This property can be used for
increasing the accuracy and robustness of the results,
as shown in (Do, 2019) and (Danescu, 2022).
The algorithms can be used with specialized
systems set up on vast areas all over the world, such
as TAROT (Boer, 2017), a network of fast acting
telescopes distributed worldwide and coordinated by
France, the OWL Net network (Park, 2018), a South
Korea coordinated array of telescopes offering fully
robotic operation for observing LEO and GEO orbits
with high accuracy, or the FireOpal network (Bland,
2018), which consists of multiple all sky observation
stations in the Australian desert, equipped with on-
site image processing and astrometric reduction
capabilities.
As alternatives to complex and centralized
solutions, low-cost solutions that can be easily set up
anywhere are presented in (Langbroek, 2023) and
(Danescu, 2022). As shown in (Langbroek, 2023), an
informal network of low-cost systems can be used to
discover and track objects that are not found in
official catalogues, and informal catalogues of
classified objects can be maintained (McCants,
2023).
The surveillance systems can discover new
satellites, or can adjust the parameters of satellites that
have outdated parameters, such as those that will soon
re-enter the atmosphere. Real time capabilities for
detection and identification are essential in these types
of applications. The accuracy of the surveillance
process can be enhanced by combining the detection
power of the wide FOV systems with the accuracy of
the telescopes using the “stare and chase” strategy.
The initial wide FOV detection will be used for short
time trajectory prediction, and a telescope will be
locked in for precise tracking (Hasenohr, 2016),
(Danescu, 2023).
Real time identification of the satellite as it is
detected by the surveillance system is valuable, as it
provides a mechanism for selecting the target in stare
and chase applications, to decide if a new satellite has
been discovered, or to identify a satellite that has
outdated orbital elements. This paper describes a
system capable of real time surveillance and satellite
identification using limited computing power. The
system relies on detecting trajectory endpoints at
discrete time intervals, and then using these endpoints
for frame-by-frame trajectory prediction, which is
then matched with detected tracklets. This way, the
tracklets are identified in real time.
2 SOLUTION OVERVIEW
The real time detection and recognition system runs
three processes in parallel, as shown in Figure 1. The
detection process handles every newly acquired
image, detects the moving streak-like structures, and
connects them into tracklets (sequences of detected
streak positions).
The calibration process runs the automatic star
identification methods provided by Astrometry.net
(Lang, 2010), and generates calibration parameters
P
i
, relating every image pixel to a pair of
astrometrical coordinates Right Ascension (RA) and
Declination (DEC). The coordinates can be used to
maintain a catalog or to compute the orbit of newly
discovered orbiting objects. The calibration
parameters P
i
can also be used to map a pair of
astrometrical coordinates to image pixels, so that we
can draw a predicted satellite trajectory on top of the
acquired image. Due to the fact that the calibration
algorithm takes more time than the frame-by-frame
detection, the calibration is invoked only for selected
frames (one out of every 20 frames, in our
experiments described here).
The prediction process starts at the moment of the
first successful calibration, and predicts the positions
of all the satellites in the space-track.org catalog for
the next two hours. The time stamps of the prediction
points start from the time of the first successful
calibration (TC
0
, which will be denoted also as T
P
),
and are incremented by 30 second amounts.
Therefore, we will not predict the positions of all
satellites for every second of the two hours, but we
only predict trajectory endpoints.
The prediction process runs only once, builds the
prediction data structure for all satellites, and then
stops. The system reaches full functionality after
about 4 minutes since the first frame is acquired.
After this time interval, which includes the first
calibration and the subsequent building of the
prediction database, the satellite positions can be
interpolated in real time for every frame, and the
detected tracklets can be matched with the predictions
and can be identified in real time.
Real Time Orbital Object Recognition for Optical Space Surveillance Applications
563
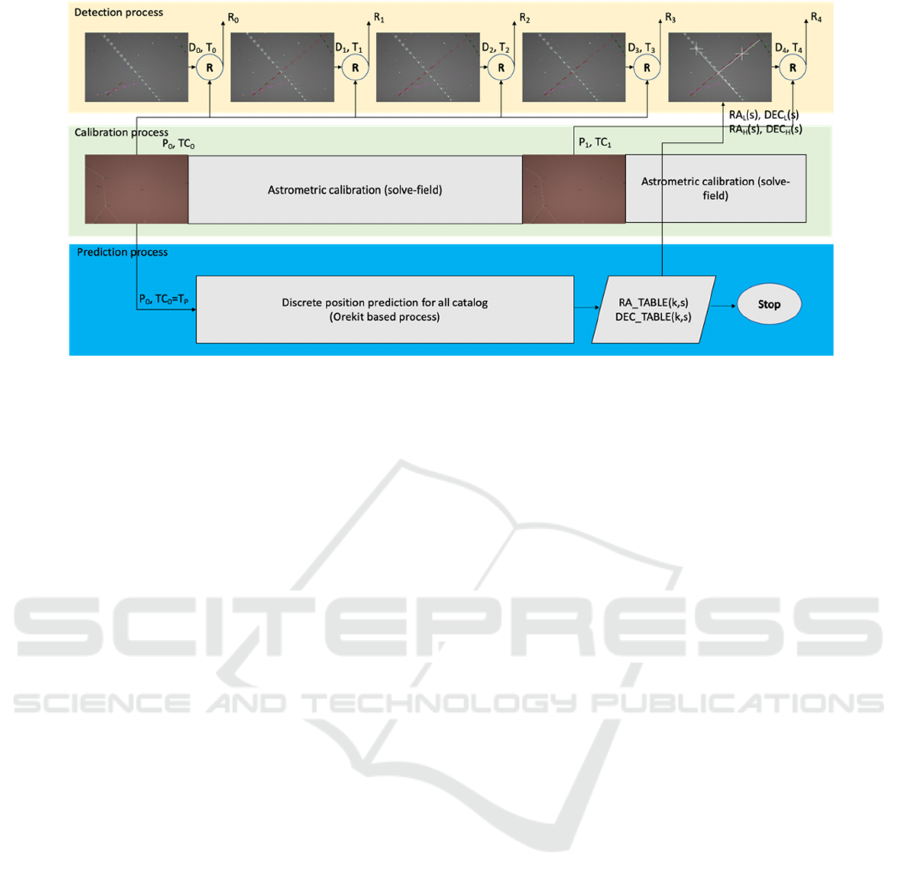
Figure 1: The solution is organized as three parallel processes: detection, calibration and prediction. Once the prediction
process finishes, the prediction data is used to interpolate the predicted satellite positions in real time.
3 SOLUTION DESCRIPTION
3.1 Batch Prediction
In order to estimate the position of the satellites
relative to the ground station observer, the following
steps are taken:
1. The latest orbital information data for known
objects is downloaded from Space-Track.org, in the
form of a list of Two-Line Elements (Kelso, 2022)
(TLEs).
2. The object detection application prepares the
prediction input, in the shape of a file containing the
GPS coordinates of the observation station, and the
time moments in the ISO 8601 format (Complete date
plus hours, minutes, seconds and decimal fraction of
a second) for which the estimations should be
performed.
3. For performing the specific orbital calculations,
the Orekit (Orekit, 2023) Java-based library is used.
For propagating the orbital TLE data, the library
implements a specific propagation class based on the
SGP4/SDP4 (Vallado, 2008) (Simplified General
Perturbation Version 4/ Simplified Deep-space
Perturbation Version 4) models. With this model,
there is a relatively low margin of error (Dong, 2010).
The propagator takes the UTC date and time
provided as input, and outputs the Position / Velocity
/ Acceleration triplet, within the ECI system (Earth
Centred, Inertial). Based on these results, and
factoring in the coordinates of the observation station,
the library can compute the topocentric equatorial
coordinates of the target, the Right Ascension and the
Declination. The 3D coordinates of the satellite are
also computed in the ECEF (Earth Centred, Earth
Fixed) reference frame, using the ITRF IERS 2010
convention. These coordinates are used for
computing the height of the satellite above the ground
surface, so that we can exclude the satellites outside
of the LEO orbit.
In order to increase the processing throughput, we
use the Java Collection API's parallelStream method,
which by default uses the Spliterator API that is
responsible for partitioning and traversing through
the given list of elements. The API's documentation
provides a clear explanation as to how it stores the
order of the elements in an encountered order, which
it will preserve in terms of the results, even if the time
it takes to process some of the data within the
different elements differs. This means that there is no
need to additionally implement a mechanism for
ordering the results. The calculations for the Position,
Velocity, Acceleration triplets for the whole time
interval are done in this fashion. By using parallel
processing, the prediction for the whole catalogue, for
two hours of look ahead time, takes less than 4
minutes on a MacBook Pro 2020 laptop.
3.2 Real Time Prediction
The result of the Orekit based prediction system is a
list of topocentric astrometric (equatorial)
coordinates, organized on two dimensions: the
discrete time intervals and the satellite numbers. The
time intervals are spaced at an interval of Q seconds
(we have experimented with Q = 60 seconds, and Q =
30 seconds. The experiments shown in this paper will
use Q = 30 seconds). The satellite number is the
ICINCO 2023 - 20th International Conference on Informatics in Control, Automation and Robotics
564

position of its orbital information in the 3le.txt file
downloaded from space-track.org, which maintains a
catalogue of more than 25000 orbital objects.
For each combination of discrete time and
satellite number, the following information is stored:
the Right Ascension and the Declination coordinates,
the 3D coordinates in the ECEF coordinate system,
the satellite name, and the satellite’s NORAD ID.
These data will be loaded into 2D arrays as soon as
the Orekit based prediction process is completed.
In order to project the astrometric coordinates into
the image space, we need to know their relation to the
image pixels. This calibration is based on
identification of the background stars, which are
catalogued and their coordinates are known. The tools
available from Astrometry.net are able to detect and
recognize the stars from any image, without prior
knowledge about the orientation of the camera or the
pixel’s angular size. The main drawback of these
tools is that they can be slower than our real time
requirement, and, at least when concerned about real
time operation, we cannot afford to calibrate each
acquired image.
The calibration will be performed in a parallel
process, for every one in 20 acquired frames. For a
time interval of 4 seconds between frames, this means
that the process will calibrate every 1:20 minutes. The
latest calibration results will be timestamped with the
time of the image used for the calibration. We’ll
denote this timestamp as T
C
, the time of the latest
successful calibration.
For every acquired frame that will be processed in
real time, we’ll have the current timestamp T. The
time difference between the current time and the time
of the latest successful calibration will be denoted as
∆𝑇
.
∆𝑇
𝑇𝑇
(1)
As the Earth rotates between observations, the
stars will change their position in the image. For a
successful association between astrometrical
coordinates and the image pixels, the time difference
between the current frame and the calibration frame
has to be taken into consideration.
For predicting the position of the satellites for the
currently acquired image, we first need to identify the
discrete time intervals in the prediction table that
encompass the current time. First, we compute the
difference between the current time T and the time of
the first prediction, T
P
.
∆𝑇
𝑇𝑇
(2)
Then, we compute the relative time ratio between the
current timestamp and the initial prediction time:
𝑘
∆𝑇
𝑄
(3)
The past and the future discrete time ratios will be
computed as:
𝑘
𝑘
(4)
𝑘
𝑘
1 (5)
The indices k
L
and k
H
are used to identify the rows in
the prediction arrays that show the position of the
satellites for the nearest past discrete time (k
L
) and for
the nearest future discrete time (k
H
). Using these two
time instances, the endpoint coordinates for the
satellite’s trajectory can be read, for each satellite s:
𝑅𝐴
𝑠 𝑅𝐴
_
𝑇𝐴𝐵𝐿𝐸𝑘
,𝑠 (6)
𝑅𝐴
𝑠 𝑅𝐴
_
𝑇𝐴𝐵𝐿𝐸𝑘
,𝑠
(7)
𝐷𝐸𝐶
𝑠 𝐷𝐸𝐶
_
𝑇𝐴𝐵𝐿𝐸𝑘
,𝑠
(8)
𝐷𝐸𝐶
𝑠 𝐷𝐸𝐶
_
𝑇𝐴𝐵𝐿𝐸𝑘
,𝑠 (9)
When the camera is fixed with respect to the ground,
the Declination coordinate corresponding to a pixel in
the image is fixed, but the Right Ascension changes
as time passes. Due to the fact that the calibration
happens at time T
C
, the current frame is acquired at
time T, and the endpoints of the predicted satellite
trajectories have their own timestamps (integer
multiples of Q added to the initial prediction time T
P
),
we need to correct the Right Ascension coordinates
of the two endpoints, to match their coordinates to the
pixels of the current frame:
𝑅𝐴′
𝑠
𝑅𝐴
𝑠
𝑘
𝑘
𝑄∆𝑇
𝜔
(10)
𝑅𝐴′
𝑠
𝑅𝐴
𝑠
𝑘
𝑘
𝑄∆𝑇
𝜔
(11)
𝜔
15 1.0027379043
3600
𝑑𝑒𝑔𝑟𝑒𝑒𝑠/𝑠
(12)
In equations 10, 11 and 12, 𝜔 denotes the angular
rotation speed of the Earth around its own axis, in
degrees per second. All times are expressed in
seconds, and all angles are expressed in degrees.
𝑥
,𝑦
𝑤𝑐𝑠
_
𝑟𝑑2𝑥𝑦𝑅𝐴′
,𝐷𝐸𝐶′
(13)
𝑥
,𝑦
𝑤𝑐𝑠
_
𝑟𝑑2𝑥𝑦𝑅𝐴′
,𝐷𝐸𝐶′
(14)
In equations 13 and 14, the function wcs_rd2xy is
provided by Astrometry.net, and will map the
astrometrical coordinates to the image coordinates
based on the existing calibration parameters. The
satellite index s has been removed from the equations
for the sake of readability.
Real Time Orbital Object Recognition for Optical Space Surveillance Applications
565

Now that the endpoints of the satellite trajectory
are known, we can also approximate the position of
the satellite in the current frame. For that, we will
assume that, at least for a limited amount of time Q,
the satellite will have a linear trajectory in the image,
with constant speed. Therefore, we will use linear
interpolation for obtaining the instantaneous image
position (x, y):
𝑥𝑥
𝑘
𝑘
𝑥
𝑘 𝑘
(15)
𝑦𝑦
𝑘
𝑘
𝑦
𝑘 𝑘
(16)
The predicted trajectories and positions can now
be superimposed on the acquired image, as we can see
in Figure 2. Not all satellites in the catalogue are used
for prediction: first, based on the 3D coordinates
produced by Orekit, we exclude the satellites that
have an altitude of more than 2500 km above the
Earth surface, because they will not be visible
anyway. Then we exclude those satellites that have
the astrometric coordinates of the trajectory endpoints
too far from the astrometric coordinates of the image
centre. This way we exclude the satellites that do not
have any chance of passing through our field of view.
Figure 2: Multiple satellite predictions superimposed on the
acquired image. The line denotes the trajectory for a 30
seconds time interval, and the cross denotes the satellite’s
current predicted position. The satellite name and the
altitude above the ground are also displayed.
3.3 Detection of Satellite Streaks
The purpose of the system is Space Surveillance,
which means observation of a wider field of view,
mainly for discovering new objects or to update the
orbital parameters of some objects that have their
orbit altered periodically (newly launched objects, or
decaying objects pending re-entry in the atmosphere).
Our system relies on a Canon lens of 85 mm and
F/1.8 aperture, which ensures a field of view of 15x10
degrees. The camera is a Canon EOS 800 D DSLR
camera, acquiring images of 2400x1600 pixels. The
camera is set to operate in external trigger, pulse
width exposure control mode, so that we can precisely
timestamp the images and also control the exposure
time from the acquisition control program.
The camera is fixed with respect to the ground, an
observation setup known as “staring”. A more precise
observation strategy is the sidereal tracking approach,
where the camera is mounted on a system that
compensates the Earth’s rotation and makes the stars
appear fixed in the image. Such a mount is more
expensive, and reduces the portability of the system.
The exposure time is set at 1.5 seconds. A larger
exposure will generate longer satellite streaks, but
will also cause the stars to appear elongated due to the
Earth’s motion. The images are captured and
transferred to a host PC via the USB connection. Each
image file is assigned a timestamp from a GPS based
synchronization system.
The image processing algorithm for detecting the
satellite tracklets has the following steps:
1. Converting the images to grayscale.
2. Estimating the background using a large
median filter.
3. Performing background subtraction.
4. Computing the differences between
successive frames, with the background
removed.
5. Applying thresholding.
6. Labelling connected components.
7. Estimating elongated shapes.
8. Forming and validating tracklets.
Connected components having elongated shape
are identified as potential satellite streaks. The
presence of clouds, atmospheric turbulence, or the
faint motion of brighter stars can cause false
positives. Most of the false positives will be
eliminated by the process of tracklet formation.
The satellite candidates are connected to form
tracklets based on collinearity criteria. Only when a
minimum of three streak candidates are combined
into a tracklet the tracklet is assumed to be a valid
detection. A more detailed description of the satellite
detection process can be found in (Danescu, 2022).
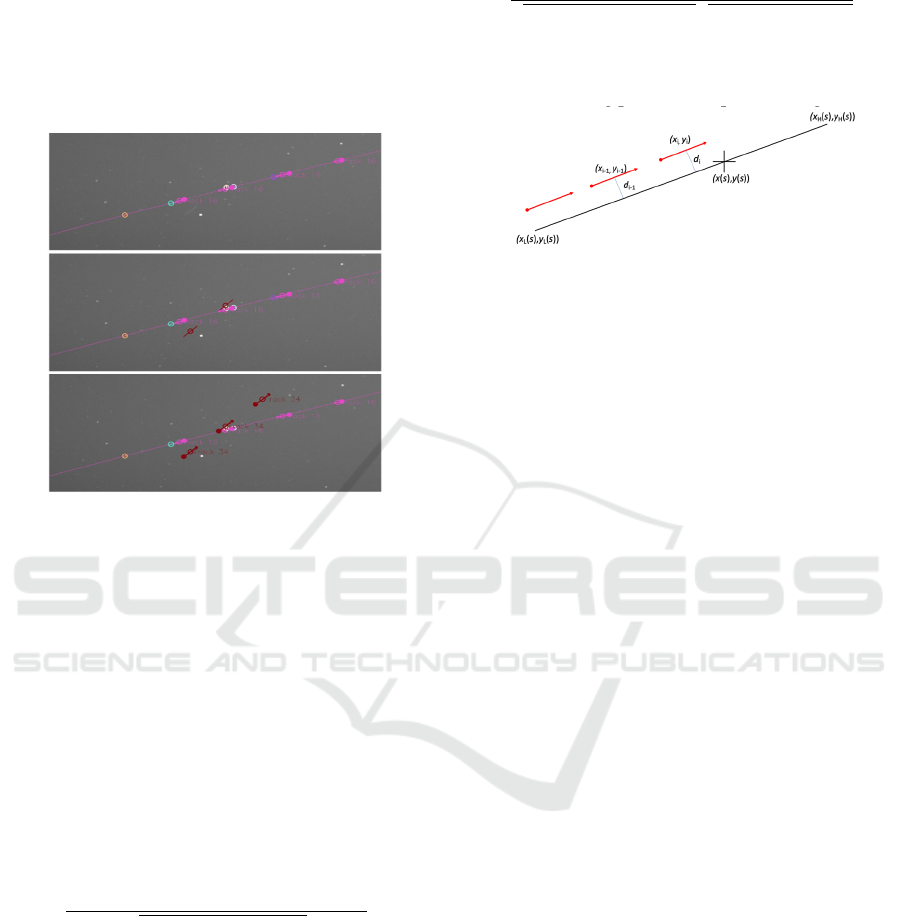
Figure 3 illustrates the tracklet formation process.
Initially, the first streak becomes visible. As the
second streak, which is collinear with the first, is
detected, the two initial results are shown as a tracklet
in phase 1 (potential but not yet valid). When three
streaks are detected, the tracklet is considered valid,
with the orientation depicted by arrows.
ICINCO 2023 - 20th International Conference on Informatics in Control, Automation and Robotics
566
Each valid tracklet contains a sequence of points
(x
i
, y
i
), with timestamps T
i
. A tracklet is considered
active if it has not yet passed out of the field of view.
For example, the red tracklet of figure 3 is active,
while the pink one is not. Only the active tracklets are
considered for matching with the predicted
trajectories.
Figure 3: Detection of satellites in image sequences. Top:
initial streak becomes visible. Middle: the tracklet is
initiated, but not yet validated. Bottom: valid tracklet
showing the orientation of the motion.
3.4 Matching the Detections with the
Predicted Trajectories
For each predicted satellite s, the trajectory is defined
by the two endpoints (x
L
(s), y
L
(s)) and (x
H
(s), y
H
(s)),
and its current position is defined by the points (x(s),
y(s)). For an active track, we’ll take into consideration
the latest two detection points (middle of the streak),
(x
i
, y
i
) and (x
i-1
, y
i-1
).
First, the distances between the tracklet points and
the predicted trajectory line will be computed:
𝑑
|
𝑥
𝑥
𝑦
𝑦
𝑥
𝑥
𝑦
𝑦
|
𝑥
𝑥
𝑦
𝑦
(17)
In order to accept a match between the tracklet and
the predicted trajectory, both d
i
and d
i-1
should be
below an acceptable threshold.
Another test is the angle between the predicted
trajectory and the tracklet trajectory. The angle
should be zero, as the two trajectories should be
parallel. The cosine of the angle between the
trajectories can be computed as:
cos 𝜑
𝑥
𝑥
𝑥
𝑥
𝑦
𝑦
𝑦
𝑦
𝑥
𝑥
𝑦
𝑦
𝑥
𝑥
𝑦
𝑦
(18)
The cos 𝜑 value should be close to 1 for parallel
trajectories. A value of 0.99 is used as a threshold.
The matching process is depicted in Figure 4.
Figure 4: Comparison between a tracklet and a predicted
trajectory.
4 TESTS AND RESULTS
4.1 Testing Setup
The testing process is performed online, during live
acquisition. The testing process has the following
steps:
1. The latest files containing updated orbital
information are downloaded from Space-
Track.org before the acquisition starts.
2. The hardware system is set up.
3. The acquisition and processing software is
started, and will produce in real time the files
containing the detection results and the
matching result.
4. The acquisition process is stopped.
5. The detection and matching results are
analysed offline for validation.
The most recent version of the system described in
this paper was tested on May 22, 2023. The
acquisition started at 22:00, and ended at 24:18.
4.2 Results
The system was able to detect a total of 231 tracklets.
Out of these tracklets, 218 were identified in real time
as belonging to known satellites, with altitudes
ranging from 400 km to 1500 km.
Not all predicted trajectories are matched with
detected tracklets, as we can clearly see from Figure
5. The matched predictions are shown as thick white
lines, while the predictions that have no tracklets
associated with them are shown with thinner white
lines and text.
Real Time Orbital Object Recognition for Optical Space Surveillance Applications
567
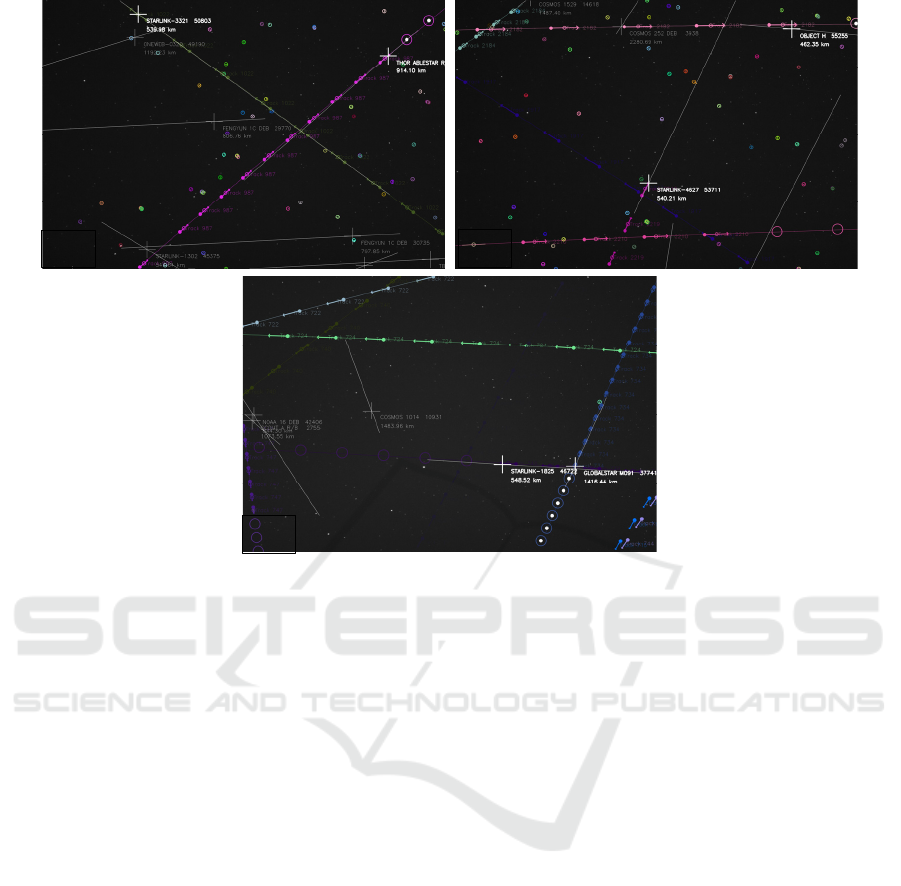
Figure 5: (a) Two satellites are detected and matched in real time, while some predicted trajectories have no associated
detections; (b) Unidentified tracklet (Track 2210, bottom of image, pink). It was later identified as a Japanese military satellite;
(c) Unidentified tracklet (Track 747, bottom left corner, purple). It was later identified as a US military satellite.
Of special interest are the situations when the
satellite is detected, but there is no predicted
trajectory to match it with. We had 13 such situations
for our test sequence, and they were analysed closely
offline. The offline analysis showed that:
- 8 tracklets were caused by passing planes,
which cause streaks that are similar to those
of LEO satellites;
- 2 tracklets were caused by Starlink satellites
with incorrect or outdated orbital
information;
- 3 tracklets had no explanation.
The three tracklets that still had no explanation
were tested against unofficial orbital data found at
(McCants, 2023), gathered as part of a distributed
effort to keep an eye on “classified” satellites. Based
on this data, we have identified them as military
satellites (2 belonging to the USA, and 1 belonging to
Japan). Two of them are shown in Figure 5(b) and
Figure 5(c).
5 CONCLUSIONS
In this paper we have described the solution for real
time detection and identification of satellites in the
LEO region, for wide field of view surveillance. The
solution is based on real time frame by frame
detection, and look ahead prediction of satellite
trajectories for the duration of the observation period.
The system has been tested by surveying real
satellites, in real time, and the identification
mechanism proved to work as expected.
Real time identification of surveyed satellites is
important for associating the results with the satellite
ID, for the purpose of orbital parameters refinement
and catalogue maintenance, but also for deciding
which satellites are worth a more in-depth look. A
satellite that is not matched with a predicted trajectory
can be a new, previously unknown orbital object, and
early results can lead to first estimations of its orbit.
A satellite that is on a re-entry path may also have its
orbital parameters altered, and its mismatch with the
predicted trajectory indicates that refinement of its
orbital parameters is in order.
Perhaps the most useful use of these results is in
the case of the “stare and chase” scenario. A more
accurate instrument can be oriented to better observe
a promising target, and provide more accurate results.
The integration of the real time satellite identification
within a stare and chase mechanism will be part of the
future work.
(a)
(
b
)
(c)
ICINCO 2023 - 20th International Conference on Informatics in Control, Automation and Robotics
568

ACKNOWLEDGEMENTS
The research was supported by a grant from the
Ministry of Research and Innovation, project number
PN-III-P2-2.1-SOL-2021-2-0192.
REFERENCES
Bland, P., Madsen, G., Bold, M., Howie, R., Hartig, B.,
Jansen-Sturgeon, T., Mason, J., McCormack, D.&
Drury, R. (2018). FireOPAL: Toward a Low-Cost,
Global, Coordinated Network of Optical Sensors for
SSA. Proceedings of the 19th AMOS (Advanced Maui
Optical and Space Surveillance Technology
Conference), USA, Sept. 5-18, 2018.
Boër, M., Klotz, A., Laugier, R., Richard, P., Dolado Perez,
J.-C., Lapasset, L., Verzeni, A., Théron, S., Coward,
D.& Kennewell, J.A. (2017). TAROT: A network for
Space Surveillance and Tracking operations.
Proceedings of 7th European Conference on Space
Debris, Darmstadt, Germany.
Ciurte, A., Soucup, A. & Danescu, R. (2014). Generic
method for real-time satellite detection using optical
acquisition systems. 2014 IEEE 10th International
Conference on Intelligent Computer Communication
and Processing (ICCP), Cluj-Napoca, Cluj, Romania,
2014, pp. 179-185.
Danescu, R., Itu, R., Turcu, V. & Moldovan, D. (2023).
Adding Surveillance Capabilities To A Leo Tracker
Using A Low-Cost Wide Field Of View Detection
System. 2nd NEO and Debris Detection Conference,
Darmstadt, Germany, 24-26 January 2023.
Danescu, R.G., Itu, R., Muresan, M.P., Rednic, A.& Turcu,
V. (2022). SST Anywhere – A Portable Solution for
Wide Field Low Earth Orbit Surveillance. Remote
Sensing, 14 (8), art no. 1905.
Diprima, F., Santoni, F., Piergentili, F., Fortunato, V.,
Abbattista, C., Amoruso, L. (2018). Efficient and
automatic image reduction framework for space debris
detection based on GPU technology. Acta Astronautica
145, 332–341.
Do, H.N.; Chin, T.J.; Moretti, N.; Jah, M.K.; Tetlow, M.
(2019). Robust foreground segmentation and image
registration for optical detection of geo objects.
Advances in Space Research, 64, 733–746.
Dong, W. and Chang-yin, Z. (2010). An accuracy analysis
of the sgp4/sdp4 model. Chinese Astronomy and
Astrophysics, 34(1):69–76.
Haimerl, J.A. & Fonder, G.P. (2015). Space Fence System
Overview. Proceedings of the 16th Advanced Maui
Optical and Space Surveillance Technology
Conference, USA, Sept. 5-18, 2015, 1-11.
Hasenohr, T. (2016). Initial Detection and Tracking of
Objects in Low Earth Orbit. Master Thesis, German
Aerospace Center Stuttgart, University of Stuttgart,
Institute of Applied Optics, 2016.
Hickson, P. (2018). A fast algorithm for the detection of
faint orbital debris tracks in optical images. Advances
in Space Research 62, 3078–3085.
Kelso, T. S. (2022). Celestrak: Norad two-line element
set format. URL https://celestrak.org/NORAD/
documentation/tle-fmt.php (Accessed May 31, 2023).
Kim, D.-W. (2016). ASTRiDE: Automated Streak
Detection for Astronomical Images. URL
https://github.com/dwkim78/ASTRiDE. (Accessed
May 24, 2023).
Lang, D., Hogg, D.W., Mierle, K., Blanton, M., Roweis, S.
(2010). Astrometry.net: Blind astrometric calibration of
arbitrary astronomical images. Astronomical Journal,
139, 1782–1800.
Langbroek, M., Bassa, C. & Molczan, T. (2023). Tracking
The Dark Side On A Shoestring Budget. 2nd NEO and
Debris Detection Conference, Darmstadt, Germany,
24-26 January 2023.
Levesque, M.P.; Buteau, S. (2007). Image Processing
Technique for Automatic Detection of Satellite Streaks.
Technical Report; Defence Research and Development:
Valcartier, QC, Canada, 2007.
LockheedMartin (2022). Space Fence. URL
https://www.lockheedmartin.com/en-us/products/spa
ce-fence.html (accessed 15 February 2022).
McCants, M. (2023). Mike McCants' Satellite Tracking
TLE ZIP Files. URL https://www.mmccants.
org/tles/index.html (accessed May 24, 2023).
Orekit (2023). Orekit - An accurate and efficient core layer
for space flight dynamics applications. URL orekit.org
(accessed May 24, 2023).
Park, J.H.; Yim, H.S.; Choi, Y.J.; Jo, J.H.; Moon, H.K.;
Park, Y.S.; Roh, D.G.; Cho, S.; Choi, E.J.; Kim, M.J.;
et al. (2018). OWL-Net: Global Network of Robotic
Telescopes for Satellites Observation. Advances in
Space Research, 62, 152–163.
SpaceTrack (2023). Space Track. URL space-track.org.
(Accessed May 24, 2023).
Vallado, D. and Crawford, P. (2008). Sgp4 orbit
determination. AIAA/AAS Astrodynamics Specialist
Conference and Exhibit, 2008.
Vananti, A., Schild, K., Schildknecht, T. (2015). Streak
Detection Algorithm For Space Debris Detection On
Optical Images. Proceedings of the 16th Advanced
Maui Optical and Space Surveillance Technology
Conference, USA, Sept. 5-18, 2015, 15–18.
Virtanen, J., Poikonen, J., Säntti, T., Komulainen, T.,
Torppa, J., Granvik, M., Muinonen, K., Pentikäinen, H.,
Martikainen, J., Näränen, J. and Lehti, J. (2016). Streak
detection and analysis pipeline for space-debris optical
images. Advances in Space Research, 57(8), pp.1607-
1623.
Wijnen, T.P.G.; Stuik, R.; Redenhuis, M.; Langbroek, M.;
Wijnja, P. (2019). Using All-Sky optical observations
for automated orbit determination and prediction for
satellites in Low Earth Orbit. Proceedings of the 1st
NEO and Debris Detection Conference, Darmstadt,
Germany, 22–24 January 2019, 1-7.
Real Time Orbital Object Recognition for Optical Space Surveillance Applications
569
