
Fractional Order-Sliding-Mode Controller for Regulation of a Nonlinear
Chemical Process with Variable Delay
Antonio Di Teodoro
a
, Marco Herrera
b
and Oscar Camacho
c
Colegio de Ciencias e Ingenier
´
ıas ¨El Polit
´
ecnico”, Universidad San Francisco de Quito USFQ, Quito, Ecuador
Keywords:
Sliding Mode Control, Fractional Order Calculus, Reduced Order Model, Chemical Processes, Simulation.
Abstract:
The present work shows the application of a new controller based on combining the fractional order calculus
concepts with the sliding mode theory to a non-linear system with variable delay. The power of fractional-order
calculus is used to identify the real process and represent it as a reduced-order model. From this model, the
controller is developed using the sliding-mode control procedure. An SMC based on FOPDT and one based
on fractional calculus are compared using some performance indicators to assess performance quantitatively.
1 INTRODUCTION
The chemical and biochemical engineering field has
a lot of control problems, one of which is the pri-
mary focus of current work: regulating variable time
delay processes. In real applications, plant behav-
ior is often affected by unexpected dynamics, out-
side disturbances, etc. (Obando et al., 2023). Dis-
turbances, model errors, unmodeled dynamics, ele-
vated time delay, and poorly defined plant charac-
teristics reduce the efficacy of conventional regula-
tion schemes even for linear time-invariant systems in
chemical processes, especially at the industrial scale.
When designing a process controller, the control
actions become slow if it has a time delay, decreas-
ing the total process performance. Furthermore, in
some cases, it has been seen that delays produce in-
stability in the system, as in (Prado et al., 2022), lead-
ing to the search for more advanced control proposals.
Thus, controlling dynamical systems with delay time
has become a major topic in control theory.
The variable structure control has a method called
the sliding mode control (SMC). SMC is a simple
and reliable method for creating controllers for linear
and non-linear processes, according to (Camacho and
Smith, 2000; Utkin et al., 2020). SMC is one of the
most widely used techniques for managing dynamical
systems because it is relatively insensitive to uncer-
tainties(Camacho and Smith, 2000; Esp
´
ın et al., 2022;
a
https://orcid.org/0000-0002-8766-0356
b
https://orcid.org/0000-0002-3124-2403
c
https://orcid.org/0000-0001-8827-5938
Utkin et al., 2020). The traditional sliding mode con-
trol always maintains a predesigned sliding variable
S(t), which is generated by a so-called reaching con-
dition, such as S(t)
˙
S(t) < 0, to be zero under high-
frequency switching (Utkin et al., 2020).
Substantial research has been published on the ap-
plication of SMC in industrial engineering process
control; we can name some of them here(Esp
´
ın et al.,
2022; Xiao and Li, 2016; Dimassi et al., 2019; Ra-
sul and Pathak, 2016; Sardella et al., 2020; Siddiqui
et al., 2020; Herrera et al., 2020; Salinas et al., 2018;
Kadu et al., 2018). Although few studies on SMC de-
sign employ fractional order calculus techniques for
chemical processes, we can highlight some of them
(Di Teodoro et al., 2023; Di Teodoro et al., 2022;
Ullah and Mohammad, 2022; Allahem et al., 2022;
Mehri and Tabatabaei, 2021; Haghighi and Ziaratban,
2020; Ardjal et al., 2021).
The current work illustrates the application of a
novel controller based on fusing notions from sliding
mode theory and fractional order calculus to a non-
linear system with variable delay. First, the actual
process is represented as a reduced-order model us-
ing the strength of fractional-order calculus. Then,
the sliding-mode control approach is used to create
the controller from this model. Finally, some perfor-
mance measures were used to evaluate and compare
an SMC based on FOPDT and an SMC based on frac-
tional calculus.
The paper is divided as follows: in Section
two, some fundamentals are described; Section three
shows the methodology of design; in Section four, the
Di Teodoro, A., Herrera, M. and Camacho, O.
Fractional Order-Sliding-Mode Controller for Regulation of a Nonlinear Chemical Process with Variable Delay.
DOI: 10.5220/0012159400003543
In Proceedings of the 20th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2023) - Volume 1, pages 131-139
ISBN: 978-989-758-670-5; ISSN: 2184-2809
Copyright © 2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
131

results by simulations are presented; and finally, the
conclusion.
2 BACKGROUND
2.1 Sliding Mode Control
The SMC is a variable structure controller created uti-
lizing nonlinear control techniques. It is a robust con-
trol that reacts appropriately to nonlinear systems un-
der unknown conditions. Furthermore, it is immune
to changes in modeling parameters. The SMC consid-
ers a sliding surface that allows the controlled variable
to transition from an initial state to the desired final
state. For this reason, its control law includes a con-
tinuous component to move on the sliding surface and
a discontinuous part for the reachability phase. The
motion of the system on a sliding surface is known as
the sliding mode (Utkin et al., 2020).
The SMC control law U(t), as expressed in (1):
U(t) = U
eq
(t) +U
D
(t) (1)
U
eq
(t): It is obtained from the equivalent control
method (Utkin et al., 2020). Keep the controlled vari-
able on the sliding surface σ(t) = 0. The equivalent
control is deduced, considering that the derivative of
the surface is zero.
The sliding condition is given by:
dσ(t)
dt
= 0 (2)
Combined with the previous equation and the
model of the process system, U
eq
(t) is obtained.
U
D
(t): It is the discontinuous control part; it al-
lows the system to reach the sliding surface. It incor-
porates a nonlinear element that includes the switch-
ing element of the control law; therefore, U
D
(t) con-
tains the switching element and is given by:
U
D
(t) = K
D
sign(σ(t)) (3)
K
D
is a tuning parameter responsible for the reach-
ing mode.
SMC transitions on the sliding surface cause chat-
tering. Chattering excites system dynamics not mod-
eled, causes vibration of the actuator with wear, and
degrades performance. One way to reduce such im-
pacts is to smooth the non-linear switching function
using soft functions such as the sigmoid function (Ca-
macho and Smith, 2000). Therefore, the discontinu-
ous controller utilizes the sigmoid function:
U
D
(t) = K
D
σ(t)
|σ(t)| + δ
(4)
The convergence condition, often known as at-
tractiveness, ensures that the system dynamics will
always converge on the sliding surface(Utkin et al.,
2020). It is necessary to formulate a Lyapunov func-
tion V (t) > 0 with finite energy. The candidate Lya-
punov function is defined as follows.
V (t) = 1/2σ
2
(t) (5)
It is sufficient to make sure that the derivative of
the function V (t) is negative for it to be possible for
the function V (t) to be reduced. Therefore, the condi-
tion of convergence can be written as follows:
dV (t)
dt
=
dσ(t)
dt
σ(t) < 0 (6)
It states that if the projection of the system trajec-
tories on the sliding surface is stable, then the system
is stable (Li et al., 2010).
2.2 Briefs About Fractional Calculus
2.2.1 Definitions of Caputo and
Riemann-Liouville Derivative and Their
Connection
Definition 1. The Riemann − Liouville fractional in-
tegral of order α > 0 is given by (see (Kilbas et al.,
2006; Miller and Ross, 1993; Podlubny, 1994; Kilbas
et al., 1993))
I
α
a
+
h
(x) =
1
Γ(α)
Z
x
a
h(t)
(x −t)
1−α
dt, x > a. (7)
We denote by I
α
a
+
(L
1
) the class of functions h, rep-
resented by the fractional integral (7) of a summable
function, that is, h = I
α
a
+
ϕ, where ϕ ∈ L
1
(a,b). A de-
scription of this class of functions is given in (Kilbas
et al., 2006; Kilbas et al., 1993; Abbas et al., 2023;
Patel et al., 2023) (L
1
[a,b] space can be defined as a
space of measurable functions for which the absolute
value is Lebesgue-integrable).
Definition 2. Let
D
α
a
+
h
(x) denote the fractional
Riemann–Liouville derivative of order α > 0, where
h ∈ L
1
(a,b) (see (Kilbas et al., 2006; Miller and Ross,
1993; Podlubny, 1994; Kilbas et al., 1993; Abbas
et al., 2023))
RL
D
α
a
+
h
(x) =
d
dx
s
1
Γ(s−α)
R
x
a
h(t)
(x−t)
α−s+1
dt, (8)
s = [α] + 1,x > a, (9)
where [α] denotes the integer part of α and Γ is the
gamma function.
When 0 < α < 1, then (8) takes the form
RL
D
α
a
+
h
(x) =
d
dx
I
1−α
a
+
h
(x). (10)
ICINCO 2023 - 20th International Conference on Informatics in Control, Automation and Robotics
132

Example 1.
RL
D
α
a
+
f (x − a)
γ
=
(
0, γ = α − 1,
γ+1
γ−α+1
(x − a)
γ−α
, otherwise
.
With α ∈ (0,1), a > 0, k ∈ N and γ > −1, and an
appropriate f . (See (Ceballos et al., 2020; Ceballos
et al., 2022; Kilbas et al., 1993))
Definition 3. Let α ≥ 0 and m = [α]. Then, we can
define the operator
c
D
α
a
+
by
c
D
α
a
+
f := I
m−α
a
+
d
dx
m
f ,
when
d
dx
m
f ∈ L
1
[a,b].
Example 2.
c
D
α
a
+
(x − a)
β
= 0 if β ∈ {0,1,2,. . ., m −
1}.
Lemma 1. Let α ≥ 0 and m = [α] + 1. Suppose that
f is such that
c
D
α
a
+
and
RL
D
α
a
+
exists. Then
c
D
α
a
+
f =
RL
D
α
a
+
f −
m−1
∑
k=0
(x − a)
k−α
Γ(k − α + 1)
d
dx
k
f (a).
See (Kilbas et al., 2006; Podlubny, 1994; Kilbas et al.,
1993))
consequently, we have the following lemma:
Lemma 2. Let α ≥ 0 and m = [α] + 1. Suppose that
f is such that
c
D
α
a
+
and
RL
D
α
a
+
exists.
Then
c
D
α
a
+
f =
RL
D
α
a
+
f = D
α
a
+
f . If and only if
d
dx
k
f (a) = 0 for all k = 0,..., m − 1.
The semigroup property for the composition of frac-
tional derivatives does not hold in general (see (Pod-
lubny, 1994, Sect. 2.3.6)). In fact, the property:
D
α
a
+
D
γ
a
+
h
= D
α+γ
a
+
h (11)
holds whenever
h
( j)
(a
+
) = 0, j = 0,1,... ,s − 1, (12)
and h ∈ AC
s−1
([a,b]), h
(s)
∈ L
1
(a,b) and s = [γ] + 1
( AC
s
([a,b]) denotes the class of functions h, which
are continuously differentiable in the segment [a,b],
up to order s − 1 and h
(s−1)
is absolutely continuous
in [a,b]).
Remark 1. In this paper, we use D
α
a
+
to identify the
fractional operator because we assume that the initial
conditions are equal to zero.
2.2.2 Laplace Transform of Fractional
Derivatives
Definition 4. Let F(s) := (L f )(s), i.e., say, the
Laplace transform of the function f and α > 0
(See([(Kilbas et al., 1993)])).
L D
α
0
+
f
(s) = s
α
F(s) −
l−1
∑
j=0
f
( j)
(0
+
)s
α− j−1
where l = [α] + 1 and f
( j)
(0
+
) =
d
j
dt
j
f (t)|
t−→0
+
, j =
0,...,l −1. Clearly, if α ∈ (0,1) then
L D
α
0
+
f
(s) = s
α
F(s) − f (0
+
)s
α−1
(13)
2.2.3 The Use of the Mittag-Leffler for G(s)
In order to develop our model, we will make use of the
two-parameter Mittag-Leffler function. This function
is defined classically as
Definition 5. Let z ∈ C and α > 0. The two-
parameter Mittag-Leffler function is given by
E
α,β
(z) =
+∞
∑
k=0
z
k
Γ(αk + β)
, ∀z ∈ C. (14)
Remark 2. Note that E
α,β
(z) > 0 for all z ∈ C
+
and
when β = 1, then E
α,β
(z) = E
α
(z) This function is uni-
formly convergent over C. For α, β ≥ 0 If n = 1 and
r = 1. E
1,1
(z) = E
1
(z) = exp(z). (see (Kilbas et al.,
2006; Podlubny, 1994; Kilbas et al., 1993))
3 CONTROL DESIGN APPROACH
IN THE CAPUTO SENSE
This section presents the mathematical development
of the sliding mode control based on a FOPID surface.
Since SMC is a model-based controller, let us use an
empirical model of the actual process. Using the reac-
tion curve procedure, the nonlinear process can be ap-
proximated for a first-order plus dead time (FOPDT)
model (Smith and Corripio, 2005).
X(s)
U(s)
=
Ke
−t
0
s
τs + 1
. (15)
3.1 Time Delay Approximation
A first problem encounter in the realization of this
fractional controller is the time delay part (Camacho
and Smith, 2000). In the complex settings, the natu-
ral exponential function e
z
can be represented as the
well–known Taylor series centered at 0 which is abso-
lutely convergent for z ∈ C. A simple linear approx-
imation is 1 + z where the absolute error
|
e
z
− 1 − z
|
equals the Taylor remainder R
1
. On the other hand,
we have that e
−z
=
1
e
z
thus we can approximate e
−z
by
1
1+z
. Indeed, to see this let the approximation
error,
e
−z
−
1
1+z
, be bounded by ε
max
> 0. Then,
e
−z
−
1
1+z
≤
|z|
|1+z|
max
n
1,e
−Re
{
z
}
o
= ε
max
.
For example, the time delay e
−t
0
s
can be approxi-
mated to
1
t
0
s+1
and, in turn, the FOPDT transfer func-
tion is as follows:
Ke
−t
0
s
τs + 1
≈
K
(τs + 1)(t
0
s + 1)
, (16)
Fractional Order-Sliding-Mode Controller for Regulation of a Nonlinear Chemical Process with Variable Delay
133

that has a second order differential equation form (Ca-
macho and Smith, 2000).
Remark 3. A discussion that seems interesting to us
about the role of the fractional parameter in the expo-
nential function is a future work. A further conjecture
is that we believe that the parameter β is not neces-
sary. Which makes the calculation of the Laplace in-
verse much simpler.
3.2 Fractional Transfer Functions
Let α, β ∈ R, r,n ≥ 0. Then, we define the fractional
transfer function plus dead time as
X(s)
U(s)
=
K
τ(s
α
) + 1
·
1
E
n,r
(t
o
(s
β
))
(17)
where α and β can be interpreted as orders of frac-
tional derivatives and integrals. Note that transfer
function (15) is obtained when α and β approach to
1
−
.
Transfer function (17) can be approximated by (see
sec. 3.1 above)
X(s)
U(s)
=
K
τ(s
α
) + 1
·
1
E
n,r
(t
o
(s
β
))
≈
K
τ(s
α
) + 1
·
Γ(n)Γ(n + r)
Γ(n + r) +
t
o
(s
β
)
Γ(n)
. (18)
and can be changed to a fractional differential equa-
tion form. Using this approximation in equation (17)
we obtain
h
Γ(n) s
α+β
+
1
t
0
Γ(n + r)
s
α
+
1
τ
Γ(n)
s
β
+
1
τt
0
Γ(n + r)
i
X(s)
=
1
τt
0
[K Γ(n) Γ(n + r)]U (s)
(19)
Using definition 4 whenever the function X satisfies
the conditions of lemma 2 , then
D
α+β
0
+
X
(t)+
1
t
0
Γ(n + r)
Γ(n)
(D
α
0
+
X)(t)
+
1
τ
D
β
0
+
X
(t)+
1
τt
0
Γ(n + r)
Γ(n)
X(t) =
1
τt
0
[K Γ(n + r)]U (t)
(20)
3.3 Fractional Sliding Surface
Let us define the fractional sliding surface according
to (18) and (20). In the following, we assume the con-
ditions of lemma 2.
Definition 6. Let α,β ∈ R, m = [α + β], e(t) ∈
AC
m−1
([a,b]) and e
(m)
∈ L
1
(a,b). Then, the frac-
tional slinding surface, S
α,β
, is defined as
S
α,β
e
(t)
:
=
D
α+β
0
+
+ λ
1
D
α
0
+
+ λ
2
D
β
0
+
+ λ
0
I
1
e
(t).
(21)
where λ
0
,λ
1
,λ
2
are selected such that S
α,β
= 0, giving
a closed-loop stable response.
Remark 4. In the classical sense (Camacho and
Smith, 2000), our operator converge to (22)
(S e)(t) =
d
dt
+ λ
n
Z
e(t)dt. (22)
when n = 2 as α,β approach to 1
−
. The binomial
theorem can be used to generalize n. This is a fasci-
nating topic for further research. Just emphasize that
fractional computation for outside-interval parame-
ters (0,1) is much more difficult to calculate.
Remark 5. Note that the definitions 2 and 3 allow us
to commute the classical integral operator I
1
in the
fractional sliding surface operator in definition 6, i.e.,
D
α+β
0
+
+ λ
1
D
α
0
+
+ λ
2
D
β
0
+
+ λ
0
I
1
=
I
1
D
α+β
0
+
+ λ
1
D
α
0
+
+ λ
2
D
β
0
+
+ λ
0
. (23)
Classical derivation of operator 6 will be needed in
the following:
d
dt
S
α,β
e
(t) =
D
α+β
0
+
+ λ
1
D
α
0
+
+ λ
2
D
β
0
+
+ λ
0
[e(t)] .
(24)
where we have used the result in remark 5 followed by
the application of the Fundamental Theorem of Cal-
culus.
The next theorem shows how we can construct the
fractional equivalent control law U
α,β
eq
(t).
Theorem 1. Let α, β ∈ R, m = [α + β], e(t) ∈
AC
m−1
([a,b]) and R
(m)
(t), X
(m)
(t) ∈ L
1
(a,b). Then,
the fractional control law u
α,β
eq
(t) based in the frac-
tional sliding surface defined in 6 is
u
α,β
eq
(t) =
τt
0
K Γ(n + r)
D
α+β
0
+
R
(t)+ λ
1
D
α
0
+
R
(t)+
λ
2
D
β
0
+
R
(t)+ λ
0
R(t)+
1
t
0
Γ(n + r)
Γ(n)
− λ
1
D
α
0
+
X
(t)+
1
τ
− λ
2
D
β
0
+
X
(t)+
1
τt
0
Γ(n + r)
Γ(n)
− λ
0
X(t)
(25)
ICINCO 2023 - 20th International Conference on Informatics in Control, Automation and Robotics
134

Let e(t) = R(t) − X(t). First, we apply operator
(24) to function e(t) to obtain
d
dt
S
α,β
e
(t) =
d
dt
S
α,β
R
(t) −
d
dt
S
α,β
X
(t).
(26)
by the linearity of this fractional operator. Next,
d
dt
S
α,β
e
(t) = 0 guides us, combining equation (20)
to
D
α+β
0
+
R
(t)+ λ
1
D
α
0
+
R
(t)+ λ
2
D
β
0
+
R
(t)+ λ
0
R(t)+
D
α+β
0
+
X
(t)+
1
t
0
Γ(n + r)
Γ(n)
D
α
0
+
X
(t)+
1
τ
D
β
0
+
X
(t)+
1
τt
0
Γ(n + r)
Γ(n)
X(t) =
D
α+β
0
+
X
(t)+
λ
1
D
α
0
+
X
(t)+ λ
2
D
β
0
+
X
(t)+ λ
0
X(t)+
1
τt
0
[K Γ(n + r)]U(t)
(27)
The result follows.
Remark 6. If R : R → R such that R = c, where c ∈
R. Then
˙
R = 0, consequently, D
α
0
+
R(t) = 0 and D
β
0
+
R
(t) = 0.
The derivatives of the reference value can be ignored
(Camacho and Smith, 2000) without affecting the
control performance, which allows a simpler con-
troller.
Thus, the resulting equivalent controller law is given
as follows:
u
α,β
eq
(t) =
τt
0
K Γ(n + r)
λ
0
R(t)+
1
t
0
Γ(n + r)
Γ(n)
− λ
1
D
α
0
+
X
(t)+
1
τ
− λ
2
D
β
0
+
X
(t)+
1
τt
0
Γ(n + r)
Γ(n)
− λ
0
X(t)
(28)
The previous equation can be simplified by letting,
1
t
0
Γ(n + r)
Γ(n)
= λ
1
(29)
and
1
τ
= λ
2
(30)
The sliding (continuous) control law is:
u
α,β
eq
(t) =
τt
0
K Γ(n+r)
λ
0
e(t) +
1
τt
0
Γ(n+r)
Γ(n)
X(t)
(31)
The reaching (discontinuous) control law U
α,β
D
(t) is
defined as follows:
U
α,β
D
(t) = K
D
(α,β)
S
α,β
(t)
S
α,β
(t)
+ δ
α,β
(32)
Where K
D
(α,β)
is the switching gain.
Once the continuous and discontinuous parts of the
SMC, based on the fractional reduced order, have
been obtained; the total fractional order SMC law can
be represented as follows:
U
α,β
(t) = u
α,β
eq
(t) + K
D
(α,β)
S
α,β
(t)
S
α,β
(t)
+ δ
α,β
. (33)
Until now, to our knowledge, there are no tuning
equations for K
D
(α,β)
neither δ
α,β
; hence in this paper
they are tuned by trial and error.
3.4 Fractional Results Using r = α and
n = β = 1
M U
α,1
eq
(t) =
D
α+1
0
+
+ λ
1
D
α
0
+
+ λ
2
D
1
0
+
+ λ
0
R(t)
+
Γ(α + 1)
t
0
− λ
1
D
α
0
+
X
(t)
+
1
τ
− λ
2
D
1
0
+
X
(t) +
Γ(α + 1)
τt
0
− λ
0
X(t)
(34)
Where M =
K
τt
0
Γ(α + 1) and Γ(1) = 0! = 1
3.5 Stability Condition
The dynamics of the system will always converge on
the sliding surface according to the convergence con-
dition; to reach the sliding surface, it is necessary to
create a Lyapunov candidate function V (t) > 0 with
finite energy. We use the Mittag–Leffler stability the-
orem to do this and get the corresponding systems’
asymptotic stability.
Theorem 2 (See Theorem 5.1 in (Li et al., 2010)). Let
x = 0 be an equilibrium point for the system
D
α
0
+
x(t) = f (x(t)), t ≥ t
0
,
where 0 < α ≤ 1 and I ⊂ R be a domain containing
the origin f ∈ C
1
(I). Let V (t, x(t)) : [0,∞) × I → R
be a continuously differentiable function and locally
Lipschitz with respect to x such that
i) A||x||
a
≤ V (t,x(t)) ≤ B||x||
b
,
ii) D
α
0
+
V (t, x(t)) ≤ −F||x||
ab
where t ≥ 0, x ∈ I,α ∈ (0, 1), A,B, F,a, and b. are
arbitrary positive constants. Then x = 0 is Mit-
tag–Leffler stable. If the assumptions hold globally
on R, then x = 0 is globally Mittag–Leffler stable.
V (t, x(t)) = x(t)
(2)α−1
E
α,α
(−λx(t)
(2)α−1
). (35)
Fractional Order-Sliding-Mode Controller for Regulation of a Nonlinear Chemical Process with Variable Delay
135
Setpoint
FC
Control
Valve
TT
TC
Agitator
Figure 1: Mixing Tank process.
Where α ∈ (0,1) , E
α,β
is the Mittag-Leffler function
defined in (14).
This function is locally Lipschitz any interval of R
and satisfies
(i 0 < V (t,x(t)) ≤ B||x||
b
for x ∈ I ⊂ R and any B ∈
R. See (Coloma et al., 2021; Ceballos et al., 2020;
Ceballos et al., 2022)
(ii D
α
0
+
V (t, x(t)) = −λV (t,x(t)) ≤ −F||x||
ab
for any
F,a,b ∈ R, see (Kilbas et al., 2006).
in consequence x = 0 is Mittag–Leffler stable, using
the Remark 4.4 in (Li et al., 2010) (Mittag–Leffler sta-
bility and Generalized Mittag–Leffler stability imply
asymptotic stability) we guarantee asymptotic stabil-
ity of our system.
4 RESULTS AND DISCUSSION
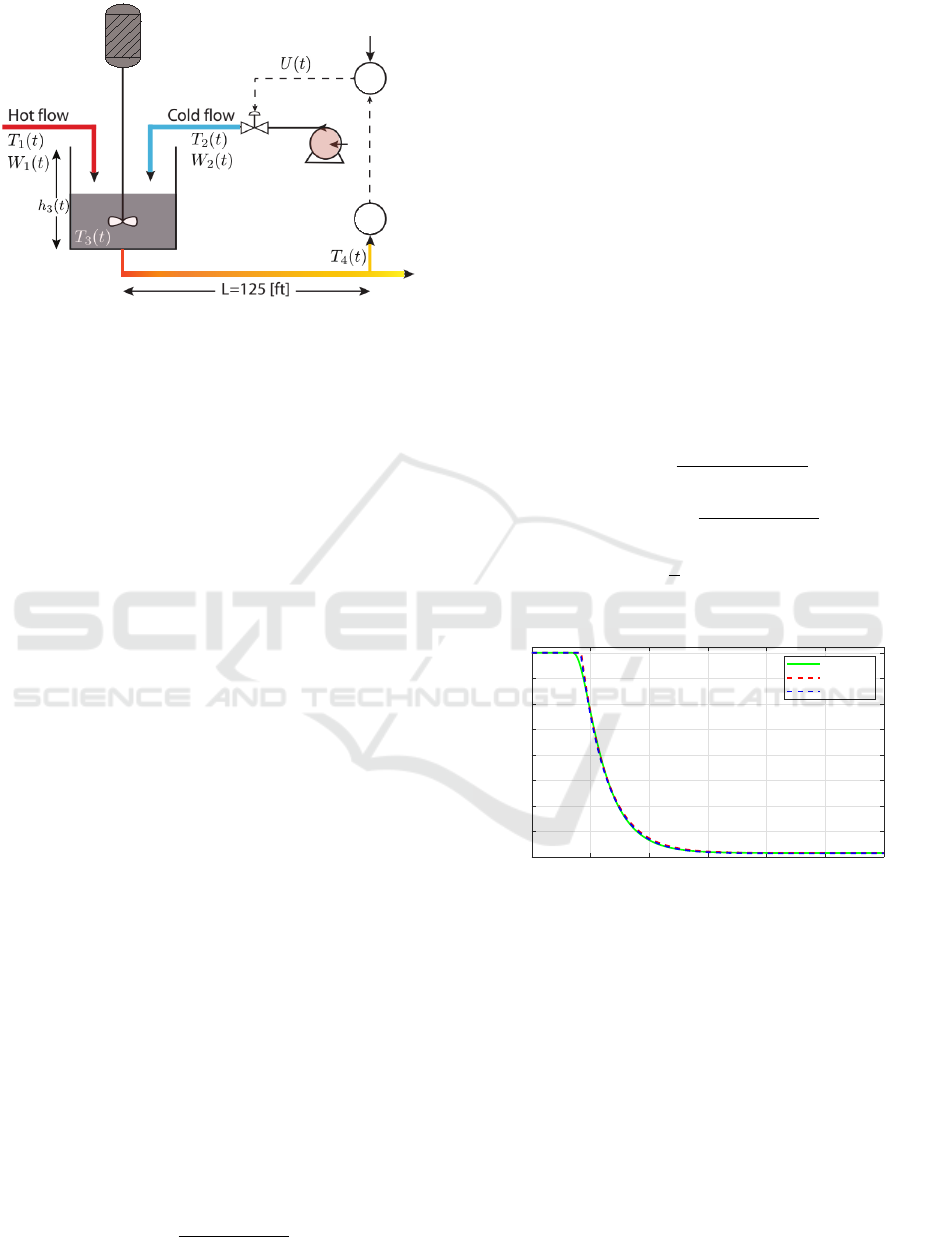
4.1 Mixing Tank Process
The mixing tank shown in Fig. 1 consists of the si-
multaneous entry of the hot W
1
(t) and cold flow W
2
(t)
into the process with temperatures T
1
(t) and T
2
(t), re-
spectively. The output T
4
(t) is the temperature of the
mixture measured at a point 125 ft downstream of the
mixing tank. The Fail-Closed (FC) actuator regulates
the cold stream to maintain the desired temperature
T
3
within the mixing tank. The control objective con-
sists of maintaining the required mixing temperature
T
3
(t) despite disturbances in the hot flow W
1
(t). The
following determines the time delay between the tank
and the sensor’s position.
T
4
(t) = T
3
(t −t
0
) (36)
with, transportation lag or delay time:
t
0
=
LAρ
W
1
(t) +W
2
(t)
(37)
where A is the cross section of the pipe, the length
of the pipe L and the density ρ of the contents of the
mixing tank. A complete description of the non-linear
model and parameters in a stationary state and the sys-
tem variables can be found in (Camacho and Smith,
2000).
4.2 Identification and Validation of
FOPDT and FO-FOPDT Models
The reaction curve method is used to identify an ap-
proximate model of the non-linear mixing tank pro-
cess. Thus, 10% of the input of the process (m(t))
is made. Figure 2 shows the responses of the tank
mix process, the approximate FOPDT model (Smith
and Corripio, 2005) and the approximate fractional
FO-FOPDT model (Gude and Garc
´
ıa Bringas, 2022).
Equations (38) and (39) show the approximate mod-
els:
G(s)
FOPDT
=
−0.8207e
−4.206s
2.227s + 1
(38)
G(s)
FO−FOPDT
=
−0.8207e
4.142s
2.262s
1.01
+ 1
(39)
As can be seen in the Eqs. (38) and (39). The
controllability relation
t
0
τ
> 1
, which makes it dif-
ficult to control (Obando et al., 2023). Also, it can be
considered as a process with a long delay.
0 5 10 15 20 25 30
Time [min]
0.46
0.465
0.47
0.475
0.48
0.485
0.49
0.495
0.5
Transmitter units [pu]
Process
FOPDT
FO-FOPDT
Figure 2: Open Loop Output Responses for step process
input.
The mean square error (MSE) is used to vali-
date the models obtained. Where: MSE
FOPDT
=
1.4192x10
−7
and MSE
F0−FOPDT
= 9.3819x10
−8
. Al-
though both indices are low, the MSE of the fractional
model was the lowest.
To analyze the performance of the FO-SMC con-
troller, it is compared with a conventional SMC con-
troller presented in (Camacho and Smith, 2000). FO-
SMC controller parameters λ
0
, λ
1
and λ
2
are tuned
according to Section 3. SMC controller parameters
and the FO-FOPDT K
D
and δ parameters are tuned
according to (Camacho and Smith, 2000). These pa-
rameters are shown in Table 1.
ICINCO 2023 - 20th International Conference on Informatics in Control, Automation and Robotics
136
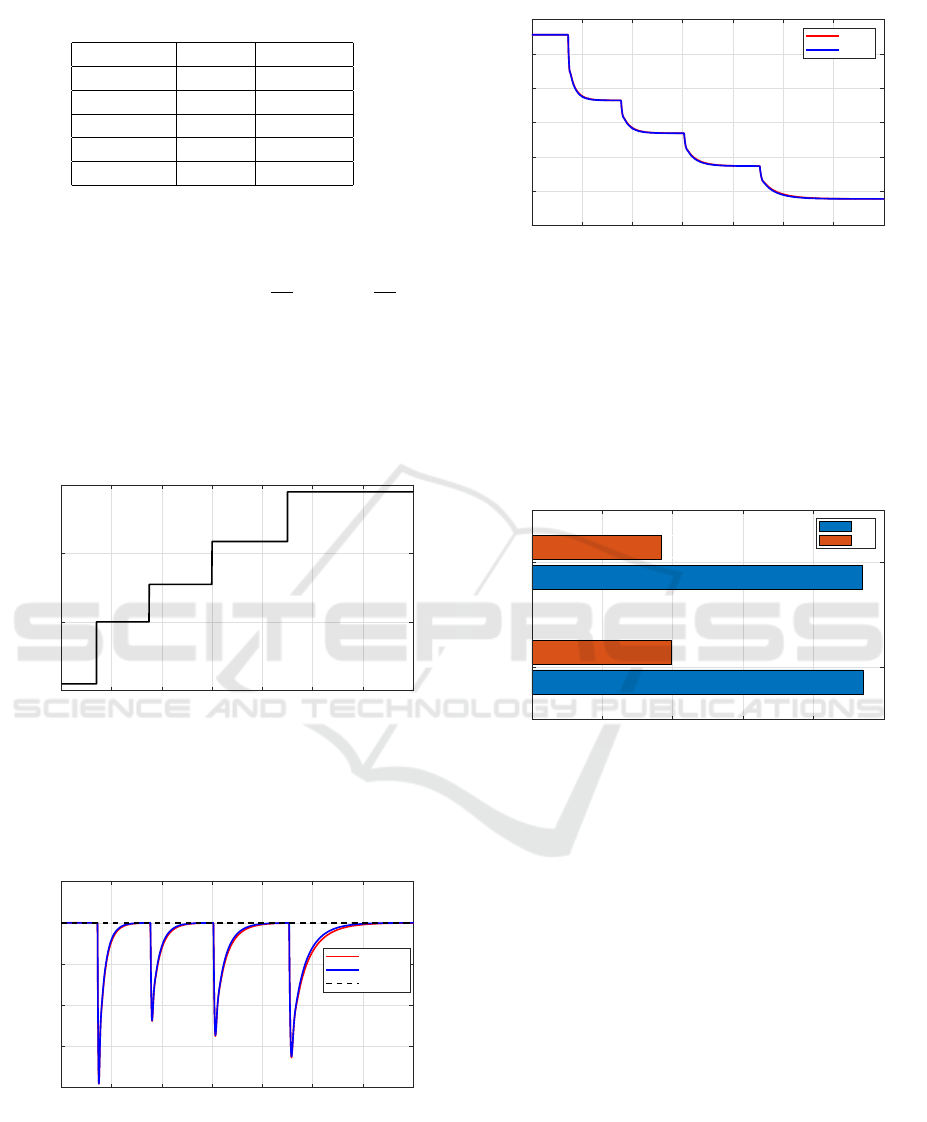
Table 1: Controller design parameters.
Parameter SMC FO-SMC
λ
0
0.1179 0.1171
λ
1
0.6867 0.2425
λ
2
− 0.4419
K
D
0.3833 0.3925
δ 0.7059 0.6894
4.3 Disturbance Rejection Test
In this test, from the operating point T
3
(t) = 150[
o
F],
the variations in steps from 250
lb
min
to 150
lb
min
in
the hot flow W
1
(t).
Due to the distance of the pipe L = 120[ f t], the
outlet temperature is measured downstream. Further-
more, due to the effect of the disturbance, the varia-
tion of W
1
(t) causes the time delay of the processes to
increase stepwise from 3.58 to 4.9[min], as shown in
Fig. 3.
0 200 400 600 800 1000 1200 1400
Time [min]
3.5
4
4.5
5
Time-Delay [min]
Figure 3: Dead Time variation.
Figure 4 shows the temperature responses for the
disturbance rejection test. It can be seen that for the
last two disturbances, the response of the FO-SMC
controller presents a slight improvement.
0 200 400 600 800 1000 1200 1400
Time [min]
142
144
146
148
150
152
Temperature [
o
F]
SMC
FO-SMC
Reference
Figure 4: Temperature responses.
The control actions for both controllers have very
similar behavior, as shown in Fig. 5.
0 200 400 600 800 1000 1200 1400
Time [min]
0.2
0.25
0.3
0.35
0.4
0.45
0.5
Controller output [pu]
SMC
F-SMC
Figure 5: Action Controllers.
4.4 Performance Indices Comparison
In Fig. 6 the comparison of the performance indices
of the SMC controller and the FO-SMC is shown. It
can be seen that the performance values obtained for
both controllers are very similar. However, the FO-
SMC controller presents slightly lower ISE and IAE
values.
0 5 10 15 20 25
SMC
FO-SMC
TVu
IAE
23.5
23.51
9.164
9.912
Figure 6: Comparative of performance indexes of the con-
trollers.
5 CONCLUSION
The paper applied a novel SMC based on a fractional-
order model to a variable time-delayed nonlinear pro-
cess. The results showed that the proposed approach
is promising, requiring more exploration of the tun-
ing equations and the effects of λ and β to reach the
sliding surface and reduce chattering.
ACKNOWLEDGEMENTS
The Universidad San Francisco de Quito (USFQ) sup-
ported this work through the Poli-Grants Program un-
der Grant 17965.
Fractional Order-Sliding-Mode Controller for Regulation of a Nonlinear Chemical Process with Variable Delay
137

REFERENCES
Abbas, S. et al. (2023). Fractional Differential Equations
and Inclusions. World Scientific.
Allahem, A., Karthikeyan, A., Varadharajan, M., and
Rajagopal, K. (2022). Computational model of a
fractional-order chemical reactor system and its con-
trol using adaptive sliding mode control. Fractals,
30(10):2240243–87.
Ardjal, A., Bettayeb, M., Mansouri, R., and Zouak, B.
(2021). Design and implementation of a model-free
fractional order intelligent pi fractional order sliding
mode controller for water level tank system. ISA
transactions.
Camacho, O. and Smith, C. A. (2000). Sliding mode con-
trol: an approach to regulate nonlinear chemical pro-
cesses. ISA transactions, 39(2):205–218.
Ceballos, J., Coloma, N., Di Teodoro, A., and Ochoa-
Tocachi, D. (2020). Generalized fractional cauchy–
riemann operator associated with the fractional
cauchy–riemann operator. Advances in Applied Clif-
ford Algebras, 30(5):1–22.
Ceballos, J., Coloma, N., Di Teodoro, A., Ochoa-Tocachi,
D., and Ponce, F. (2022). Fractional multicomplex
polynomials. Complex Analysis and Operator Theory,
16(4):1–30.
Coloma, N., Di Teodoro, A., Ochoa-Tocachi, D., and
Ponce, F. (2021). Fractional elementary bicomplex
functions in the riemann–liouville sense. Advances in
Applied Clifford Algebras, 31(61).
Di Teodoro, A., Ochoa-Tocachi, D., Aboukheir, H., and
Camacho, O. (2022). Sliding-mode controller based
on fractional order calculus for chemical processes.
In 2022 IEEE International Conference on Automa-
tion/XXV Congress of the Chilean Association of Au-
tomatic Control (ICA-ACCA), pages 1–6. IEEE.
Di Teodoro, A., Ochoa-Tocachi, D., Aboukheir, H., and Ca-
macho, O. (2023). Sliding mode control based on a
generalized reduced fractional order model: Theoret-
ical approach. In The conference on Latin America
Control Congress, pages 47–58. Springer.
Dimassi, H., Winkin, J. J., and Wouwer, A. V. (2019).
A sliding mode observer for a linear reaction–
convection–diffusion equation with disturbances. Sys-
tems & Control Letters, 124:40–48.
Esp
´
ın, J., Castrillon, F., Leiva, H., and Camacho, O. (2022).
A modified smith predictor based–sliding mode con-
trol approach for integrating processes with dead
time. Alexandria Engineering Journal, 61(12):10119–
10137.
Gude, J. J. and Garc
´
ıa Bringas, P. (2022). Influence of the
selection of reaction curve’s representative points on
the accuracy of the identified fractional-order model.
Journal of Mathematics, 2022.
Haghighi, A. and Ziaratban, R. (2020). A non-integer slid-
ing mode controller to stabilize fractional-order non-
linear systems. Advances in Difference Equations,
2020(1):1–19.
Herrera, M., Camacho, O., Leiva, H., and Smith, C. (2020).
An approach of dynamic sliding mode control for
chemical processes. Journal of Process Control,
85:112–120.
Kadu, C., Khandekar, A., and Patil, C. (2018). Design
of sliding mode controller with proportional integral
sliding surface for robust regulation and tracking of
process control systems. Journal of Dynamic Systems,
Measurement, and Control, 140(9):091004.
Kilbas, A. A., Marichev, O., and Samko, S. (1993). Frac-
tional integrals and derivatives (theory and applica-
tions).
Kilbas, A. A., Srivastava, H. M., and Trujillo, J. J.
(2006). Theory and applications of fractional differ-
ential equations, volume 204. elsevier.
Li, Y., Chen, Y., and Podlubny, I. (2010). Stability
of fractional-order nonlinear dynamic systems: Lya-
punov direct method and generalized mittag–leffler
stability. Computers & Mathematics with Applica-
tions, 59(5):1810–1821.
Mehri, E. and Tabatabaei, M. (2021). Control of quadruple
tank process using an adaptive fractional-order sliding
mode controller. Journal of Control, Automation and
Electrical Systems, 32:605–614.
Miller, K. S. and Ross, B. (1993). An introduction to the
fractional calculus and fractional differential equa-
tions. Wiley.
Obando, C., Rojas, R., Ulloa, F., and Camacho, O.
(2023). Dual-mode based sliding mode control ap-
proach for nonlinear chemical processes. ACS omega,
8(10):9511–9525.
Patel, V., Guha, D., and Purwar, S. (2023). Distur-
bance observer-based higher-order sliding mode con-
troller for frequency regulation of hybrid power sys-
tems. International Journal of Automation and Con-
trol, 17(2):188–226.
Podlubny, I. (1994). Fractional-order systems and
fractional-order controllers. Institute of Experimen-
tal Physics, Slovak Academy of Sciences, Kosice,
12(3):1–18.
Prado, A. J., Herrera, M., Dominguez, X., Torres, J., and
Camacho, O. (2022). Integral windup resetting en-
hancement for sliding mode control of chemical pro-
cesses with longtime delay. Electronics, 11(24):4220.
Rasul, T. and Pathak, M. (2016). Control of nonlinear chem-
ical process using sliding mode control. In 2016 IEEE
1st International Conference on Power Electronics,
Intelligent Control and Energy Systems (ICPEICES),
pages 1–5. IEEE.
Salinas, L. R., Santiago, D., Slawi
˜
nski, E., Mut, V. A.,
Chavez, D., Leica, P., and Camacho, O. (2018). P+
d plus sliding mode control for bilateral teleoperation
of a mobile robot. International Journal of Control,
Automation and Systems, 16(4):1927–1937.
Sardella, M. F., Serrano, E., Camacho, O., and Scaglia, G.
(2020). Linear algebra controller design based on the
integral of desired closed-loop behavior: Application
to regulation and trajectory tracking in a typical chem-
ical process. Industrial & Engineering Chemistry Re-
search, 59(45):20131–20140.
Siddiqui, M. A., Anwar, M. N., and Laskar, S. H. (2020).
Sliding mode controller design for second-order un-
ICINCO 2023 - 20th International Conference on Informatics in Control, Automation and Robotics
138

stable processes with dead-time. Journal of Electrical
Engineering, 71(4):237–245.
Smith, C. A. and Corripio, A. B. (2005). Principles and
practices of automatic process control. John wiley &
sons.
Ullah, N. and Mohammad, A. (2022). A simulation ap-
proach for closed-loop control of coupled four tank
system. International Journal of Modeling, Simula-
tion, and Scientific Computing, 13(04):2250029.
Utkin, V., Poznyak, A., Orlov, Y. V., and Polyakov, A.
(2020). Road map for sliding mode control design.
Springer.
Xiao, T. and Li, H.-X. (2016). Sliding mode control de-
sign for a rapid thermal processing system. Chemical
Engineering Science, 143:76–85.
Fractional Order-Sliding-Mode Controller for Regulation of a Nonlinear Chemical Process with Variable Delay
139
