
Computing the Traversability of the Environment by Means of Sparse
Convolutional 3D Neural Networks
Antonio Santo
1,2 a
, Arturo Gil
1 b
, David Valiente
1 c
, M
´
onica Ballesta
1 d
and Adri
´
an Peidr
´
o
1 e
1
University Institute for Engineering Research, Miguel Hern
´
andez University,
Avda. de la Universidad s/n, 03202 Elche (Alicante), Spain
2
Valencian Graduate School and Research Network of Artificial Intelligence (valgrAI),
Cam
´
ı de Vera S/N, Edificio 3Q, 46022 Valencia, Spain
Keywords:
Autonomous Mobile Robots, Artificial Intelligence, Neural Networks, Point Clouds, Sparse Convolution.
Abstract:
The correct assessment of the environment in terms of traversability is strictly necessary during the naviga-
tion task in autonomous mobile robots. In particular, navigating along unknown, natural and unstructured
environments requires techniques to select which areas can be traversed by the robot. In order to increase
the autonomy of the system’s decisions, this paper proposes a method for the evaluation of 3D point clouds
obtained by a LiDAR sensor in order to obtain the transitable areas, both in road and natural environments.
Specifically, a trained sparse encoder-decoder configuration with rotation invariant features is proposed to
replicate the input data by associating to each point the learned traversability features. Experimental results
show the robustness and effectiveness of the proposed method in outdoor environments, improving the results
of other approaches.
1 INTRODUCTION
The answer to the question ”Where should I walk?”,
formulated in (Wellhausen et al., 2019) implicitly
contains the understanding of everything that sur-
rounds the robot in order to be able to navigate along
the environment. This concept, which is assumed to
be innate to humans, should be extrapolated to au-
tonomous mobile robots, as it enables safe planning
and navigation in various applications such as explo-
ration of unknown environments, autonomous driv-
ing, search and rescue applications.
To date, path planning algorithms have been clas-
sified according to two fundamental concepts: a) the
manner in which the space is defined and represented;
b) the form in which the transitable zones are rep-
resented on the map. Thus, according to the first
concept, different representations of the space can be
found, such as: 2D occupancy maps (Moravec and
Elfes, 1985), 3D voxel-based occupancy maps (Hor-
nung et al., 2013; Oleynikova et al., 2017; Han et al.,
a
https://orcid.org/0009-0006-0085-6273
b
https://orcid.org/0000-0001-7811-8955
c
https://orcid.org/0000-0002-2245-0542
d
https://orcid.org/0000-0002-8029-5085
e
https://orcid.org/0000-0002-4565-496X
2019) or elevation maps (DEM) (Langer et al., 1994),
in which a probability value defines that a certain
space is free or occupied, and may be traversed by
the robot considering the physical parameters of the
robot.
However, the classical approaches mentioned
above are not sufficiently robust when applied to all
types of environments (Xiao et al., 2022), since au-
tonomous driving can be understood differently de-
pending on the environment in which it is intended
to navigate. Mainly in structured environments, the
free space refers to regular roads, whereas for natural
environments the concept is a bit abstract. The latter
are environments complex and diverse and can hide
invisible obstacles for the robots sensors.
This fact, together with a more sophisticated sen-
sorization of the equipment (considering character-
istics such as cost, resolution and lightness), justi-
fies an approaching to compute traversability under
a new paradigm: supervised machine learning, based
on neural networks. Specifically, in recent years the
use of LiDAR sensors in combination with Neural
Networks has become popular. In particular, LiDAR
sensors are immutable to different lighting conditions
compared to other optical sensors such as cameras.
This paper proposes a contribution to the estima-
Santo, A., Gil, A., Valiente, D., Ballesta, M. and Peidró, A.
Computing the Traversability of the Environment by Means of Sparse Convolutional 3D Neural Networks.
DOI: 10.5220/0012160300003543
In Proceedings of the 20th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2023) - Volume 1, pages 383-393
ISBN: 978-989-758-670-5; ISSN: 2184-2809
Copyright © 2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
383

tion of traversability in complex terrains using deep
learning techniques, in particular segmentation meth-
ods of a scene described by means of 3D point clouds.
The rest of the paper is organized as follows: Sec-
tion 2 presents a summary of the most significant ap-
proaches in the field of Deep Learning for the calcula-
tion of traversability. Then, the concepts on which our
method is based will be discussed and explained in
Section 3. Finally, a set of experimental results is pre-
sented, that considers different types of environments
that have been used in the training process. Finally,
Section 5 presents the main conclusions that can be
drawn from this approach.
2 RELATED WORK
This section describes some proposals in the field of
traversability calculation using neural networks and
machine learning. The contributions have been di-
vided into two main blocks: conventional machine
learning methods and methods based on the use of
neural networks.
2.1 Conventional ML Methods
These group comprises algorithms that generally start
from alternative representations of the input data, i.e.,
act on features extracted from the data which are con-
sidered to be discriminating for the problem to be
solved. This strategy is employed in (Bellone et al.,
2017), where stereo image pairs are used as input
data. In (Vapnik, 1999), a study of the most dis-
criminating geometric and appearance features for the
traversability problem in urban environments is per-
formed based on the training of an SVM classifier,
concluding that features that include normal vectors
are the most suitable for this task. In (Kragh et al.,
2015), the calculation of features based on a local
neighborhood for each point (obtained using a 3D Li-
DAR sensor) is proposed, in order to classify them
into: soil, vegetation or object. In this proposal, an
adaptive neighborhood radius is proposed to alleviate
the loss of point density as a function of the distance
to the sensor, which is inherent to LiDAR sensors. In
this way, high resolutions are guaranteed at short dis-
tances, whereas noisy features at long distances are
diminished.
One of the biggest problems with previous meth-
ods is the need for an expert to generate labels of the
class to which each point belongs. Therefore, there
are methods that automate this process by training
the classifiers with simulated data such as (Martinez
et al., 2020) which tries to describe point clouds ex-
tracted from the GAZEBO simulator from the analy-
sis of the principal directions (PCA) in a given neigh-
borhood environment.
2.2 Neural Networks
LiDAR sensors generate, at their output, the position
of a set of 3D points. These 3D points correspond
to the first reflection produced by an object when it
is illuminated by a collimated laser beam. In rela-
tion to this fact, alternatives have been developed to
efficiently work with three-dimensional data. For ex-
ample, in (Velas et al., 2018), point clouds are trans-
formed into multichannel images that store the depth,
height and reflectivity of each point. These images
are processed through dense convolutional layers to
learn which areas are traversable. Another solution
is presented in (Razani et al., 2021) where spherical
projections of the point clouds are carried out. Next
2D convolutional layers are applied to solve a seman-
tic segmentation problem. A different solution is pre-
sented in (Wang et al., 2017), where octal trees or oc-
trees are used to reduce the complexity of the space
described by the point clouds. In this manner, dense
convolution operations are restricted to those octrees
that are occupied. The same idea is extended in (Frey
et al., 2022), where the traversability of the space is
computed by means of a generalization of the con-
volution operation to n-dimensions and employing a
sparse encoder-decoder setup (Choy et al., 2019).
On the other hand there are methods that combine
the information provided by LiDAR with image in-
formation. (Gu et al., 2019) propose a road detec-
tion method by merging the color information pro-
vided by the camera and the range information ob-
tained with the LiDAR. The point clouds are projected
to their corresponding images and feed a 2D convolu-
tional neural network. (Fan et al., 2020), fuses the
features of both types of data once they have been ex-
tracted by different architectures of neural networks.
(Chen et al., 2019) proposes a progressive adaptation
of the LiDAR representation to make it more compat-
ible with the visual information from the camera. To
do so, the point cloud is transformed into an alterna-
tive representation where roads are more distinguish-
able.
3 PROPOSED APPROACH
This section defines the traversability problem. Next,
a detailed description of the approach is presented.
ICINCO 2023 - 20th International Conference on Informatics in Control, Automation and Robotics
384
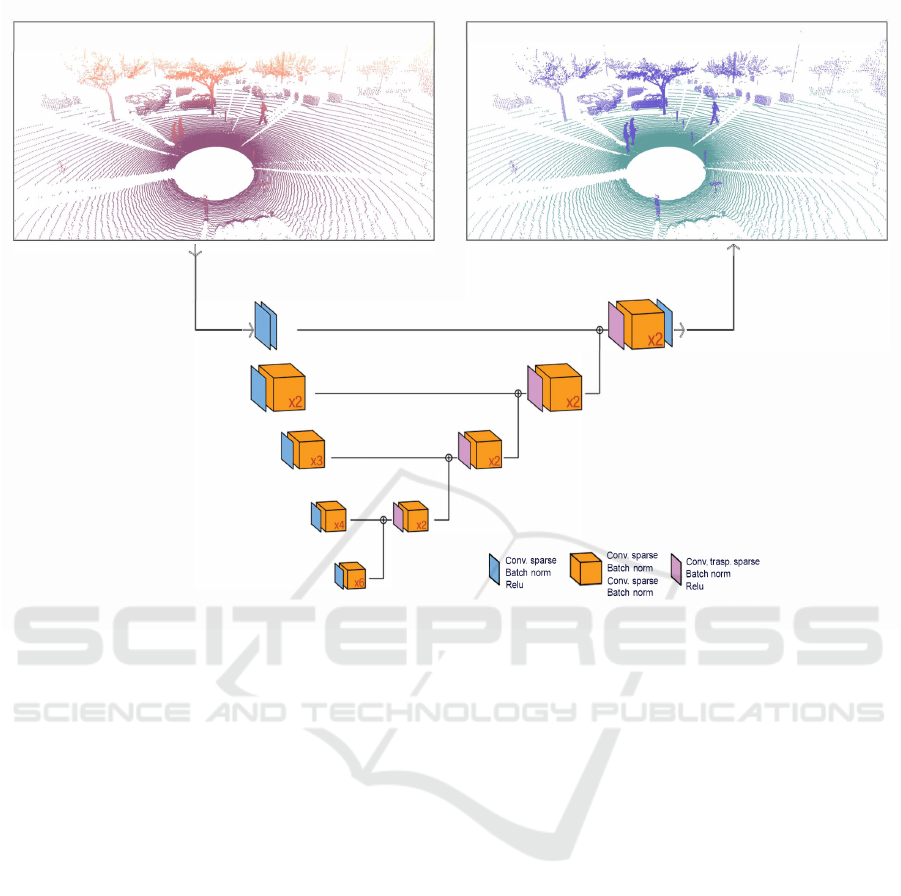
Figure 1: Encoder-decoder configuration employed, MinkUnet34 (Choy et al., 2019).
3.1 Problem Statement
The problem of traversability evaluation is considered
as a semantic segmentation task. A point cloud B is
defined as a set B = {(⃗p
i
,
⃗
f
i
,l
i
), i = 1, ... , N}, where
N is the total number of points in the cloud, each
point with coordinates ⃗p
i
∈ R
3
expressed in the Li-
DAR reference frame. The traversability condition
of each point is denoted as l
i
. We consider that each
point is associated to a feature vector
⃗
f
i
∈ R
d
in
, being
d
in
the dimensionality of the input features associated
with each point in the cloud. Each point originated by
the LiDAR sensor is considered to have coordinates
⃗p
i
= (x
i
,y
i
,x
i
), according to the coordinate system of
the LiDAR sensor itself. The aim is to infer a classifi-
cation l
i
∈ [0,1] that represents the traversavility con-
dition of the LiDAR point, that is: traversable (1) or
not traversable (0). Thus, the problem can be defined
as a point-wise binary classification problem.
3.2 Sparse Convolution
The discrete convolution operation was originally
born in the field of signal processing. However, it is
profusely used in image processing and in convolu-
tional Neural Networks.
This type of neural networks, despite being com-
putationally expensive, show great results in problems
such as image classification and segmentation. How-
ever, their possible application to sparse data, such as
point clouds, understanding sparsity as the distanc-
ing of the set of values that constitute the data, would
be computationally inefficient due to their sequential
and iterative nature. The operations to be performed
would increase by a cubic factor. As a result, the gen-
eralization of the 2D convolution in images gives rise
to the sparse convolution operation.
This type of discrete convolution allows to fo-
cus the convolution kernel on those discretized spaces
where a non-zero value exists, thus departing from the
classical constant displacement of a 2D mask when
the convolution operation is applied on images. This
idea is particularly efficient in point clouds since there
are many void zones in the cloud and, therefore, the
convolution operation on those areas would only re-
sult in unnecessary time and resource consumption.
Therefore, given any point cloud B, a sparse tensor
S is defined, in turn, formed by two tensors S(T
C
,T
F
):
• T
C
is defined as a function of the coordinates of
the points that constitute the original cloud B =
{(⃗p
i
,
⃗
f
i
,l
i
), i = 1, .. . , N}. An integer part func-
tion is applied to discretize the space. The points
Computing the Traversability of the Environment by Means of Sparse Convolutional 3D Neural Networks
385

are modified according to a scaling factor, v, that
determines the discretization of the space. In ad-
dition, the batch b
i
to which each point cloud be-
longs is added to facilitate the training of the net-
work. Thus, the tensor T
C
is defined as:
T
C
=
b
1
¯p
1
.
.
.
.
.
.
b
N
¯p
M
(1)
with ¯p
j
= f loor(⃗p
i
) = f loor
x
i
v
,
y
i
v
,
z
i
v
As a result, m points belonging to the point cloud
could be discretized in the same voxel ¯p
j
. Each of
the m points having a different feature vector
⃗
f
i
.
• T
F
stores and averages the features
⃗
f
i
associated
with the m points, that share the same space, i.e.
belong to the same voxel, ¯p
j
, after applying the
scale factor v and the integer part function.
T
F
=
¯
f
1
.
.
.
¯
f
M
(2)
where
¯
f
j
=
1
m
m
∑
i=1
⃗
f
i
∀
⃗
f
i
∈ ¯p
j
The processing of the input data is carried out using
the Minkowski Engine library
1
(Choy et al., 2019).
3.3 Sparse 3D Neural Networks
The method presented in this document uses a neu-
ral network with an encoder-decoder configuration,
whose implementation is a sparse variety of the con-
volutional neural network Resnet20 (He et al., 2016)
and the U-net architecture (Ronneberger et al., 2015).
Therefore, the network is mainly divided into two
parts:
• Encoder. The encoding part of the network is
in charge of generating point descriptors based
on the 3D sparse convolution of the features be-
longing to each point. In this case, during this
research, different combinations of input features
were tested, such as: the coordinates of each
point ⃗p
i
= (x
i
,y
i
,z
i
), the normal vectors of each
point
⃗
N
i
= (n
x
,n
y
,n
z
)
i
and several combinations
of these features. Finally, in this approach the fea-
ture vector is defined as:
⃗
f
i
= (n
z
,Z) where n
z
is
1
https://github.com/NVIDIA/MinkowskiEngine
the Z coordinate of the normal unit vector
⃗
N
i
and
the normalized coordinate Z ∈ [0, 1]. This feature
vector includes a natural invariance to rotation to
the point cloud along the vertical axis and, in the
experiments carried out, allowed to obtain the best
results.
• Decoder. The decoding part of the network tries
to reconstruct and extrapolate the latent informa-
tion generated by the encoder to the coordinates
of the input point cloud. For this purpose, trans-
posed convolution layers are used.
The network configuration is shown in Figure 1.
The figure represents different levels of the neural net-
work in a top-down way, by means of sparse convo-
lutions and sparse residual blocks. In addition, once
the encoder is finished, the scheme continues in an
ascending way through the concatenation of the de-
scriptors of different levels, indicated by the symbol
⊕, and transposed convolutions to recover the original
shape of the input point cloud.
4 EXPERIMENTAL RESULTS
This section presents the experimental results ob-
tained by the proposed method under different train-
ing configurations.
4.1 Datasets
A set of freely available databases have been used for
training, validation and testing of the neural network,
in particular:
1) SemanticKITTI: This is a dataset based on the
KITTI Vision Benchmark (Geiger et al., 2012). It
combines odometry positions and point clouds from
different paths through the city of Karlsruhe, Ger-
many, collected by the Velodyne HDL-64E sensor
model. It includes, in total, 22 urban sequences, de-
scribing highly structured environments. Ten of these
sequences contain labels for each point, oriented to
semantic segmentation problems.
2) Rellis-3D (Jiang et al., 2021): It consists of
a dataset of 13,556 point clouds divided into 4 dis-
tinct sequences captured by means of an OS1-64 Li-
DAR. There are labels for each point, and unlike the
SemanticKITTI it describes highly unstructured envi-
ronments and rural roads.
3) SemanticUSL (Jiang and Saripalli, 2021): This
dataset, employed a Clearpath Warthog equipped with
an OS1-64 LiDAR. It includes footage of the cam-
pus and research facilities of the University of Texas.
It contains 1200 point clouds labeled under the same
ICINCO 2023 - 20th International Conference on Informatics in Control, Automation and Robotics
386

(a) KITTI translated. (b) Rellis-3D translated.
(c) SemanticUSL translated.
Figure 2: Translation of the original labels to two traversability labels.
format as the SemanticKITTI including road scenes,
pedestrian streets and natural environments.
All the mentioned databases contain, approxi-
mately, 25 different labels to which a point can be-
long. These labels include semantic concepts such as:
bush, mud, asphalt, sidewalk... etc. The datasets were
relabeled, attending to the traversability condition,
giving, as a result, only two classes (“traversable” and
“non-traversable”). Figure 2 shows the modifications
made to the data to fit a binary segmentation problem.
The original classes that have been converted to the
“traversable” class are: sidewalk, asphalt, low vegeta-
tion or grass, dirt, cement and mud. The classes that
have been converted to the class “non-traversable”
are: tree, person, car, truck, building, among others.
4.2 Implementation Details
The neural network model is implemented using the
Minkowski Engine (Choy et al., 2019) and Pytorch.
The network training has been performed using two
NVIDIA 3090 TURBO graphics cards and a ter-
mination criterion that optimizes the F1 metric on
a given balanced validation set. All the code, in-
cluding a guide to the changes made to the original
datasets mentioned in section 4.1, has been developed
in Python and is available at https://github.com/
ARVCUMH/transitability_minkowski.git
As for the training parameters we have employed
a learning ratio of 0.01 and the stochastic gradient de-
scent method (SGD) as the optimizer. In addition,
given the binary nature of our approach we employed
the binary cross-entropy loss function.
In order to reduce the feature processing time in
a real application, the point clouds are voxelized at 3
centimeters. Thus the calculation of the normal vec-
tors is supported by the search of the 6 nearest neigh-
bors of each point by means of a KDtree algorithm
implemented by open3D library (Zhou et al., 2018).
4.3 Training Network
The training stage of the aforementioned datasets has
been carried out using only some SemanticKITTI se-
quences and all of the Rellis-3D sequences. The rea-
son for this choice is to have a balanced number of
training examples including, equally, urban, unstruc-
tured and natural environments. This prevents the net-
work from specializing in a particular type of environ-
ment. The use of the SemanticUSL database is lim-
ited exclusively to test processes in order to demon-
strate the generalization capabilities of the network in
environments never seen during training.
In addition, during the experiments, the network
has been trained using variations of the scaling pa-
rameter v to discretize the space, as it will be shown
in the following sections.
Computing the Traversability of the Environment by Means of Sparse Convolutional 3D Neural Networks
387
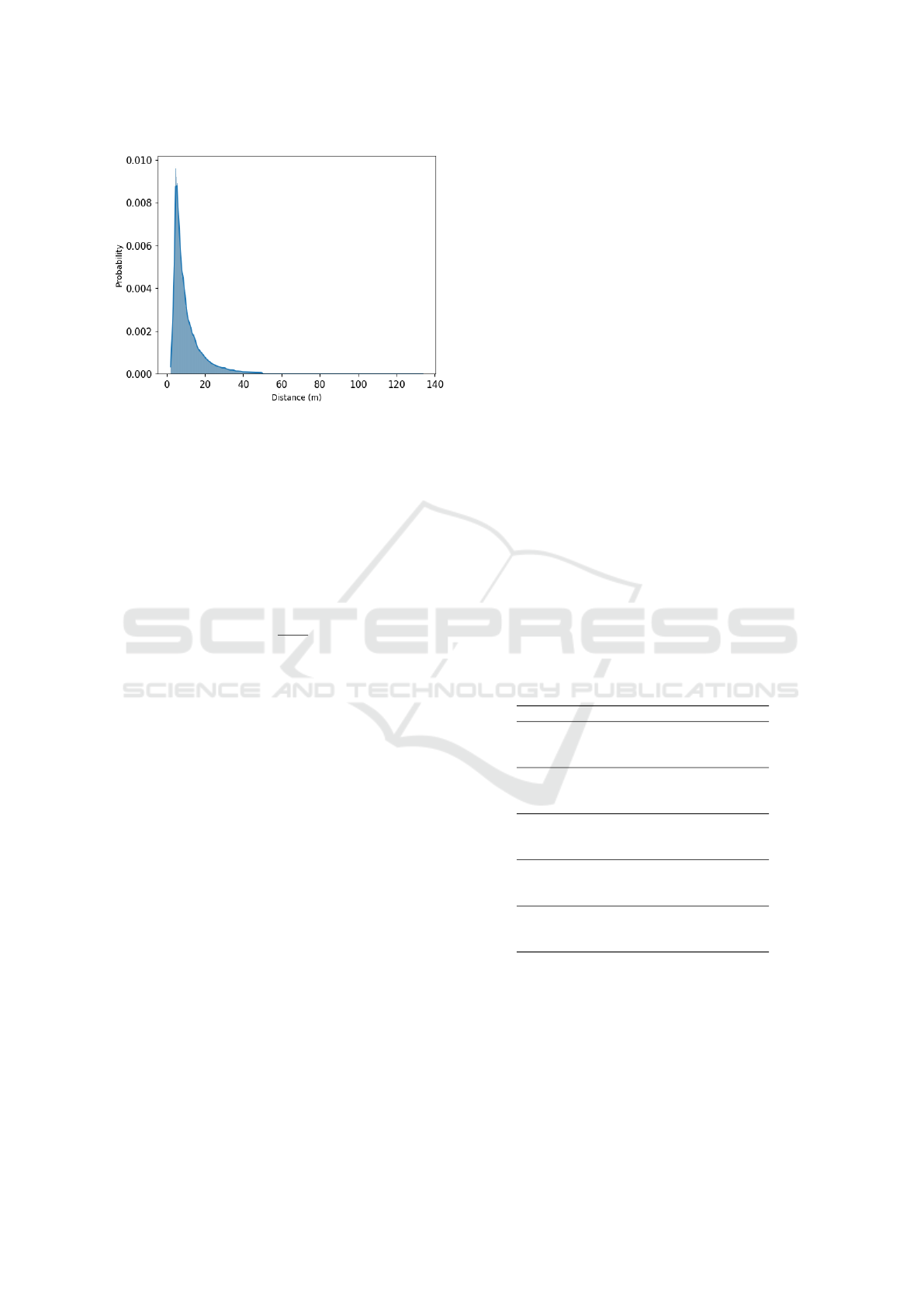
Figure 3: Probability density function according to the dis-
tance of each point to the sensor.
4.4 Distance Effect
By studying how LiDAR planes interact with the sur-
rounding environment, it is clear that the distance, d,
between consecutive LiDAR planes and the ground
plane depends on the angle formed by the intersection
of the two planes mentioned above, α, and the height,
h, at which the LiDAR is located. This relationship is
governed by:
d =
h
tanα
(3)
Thus, at very far distances, the different laser
planes are far apart. This effect is easy to appreciate
in Figure 2. Consequently, the description of some
regions in the robot environment is very inaccurate,
since the LiDAR point density is very low. This con-
cept is represented in Figure 3, which shows the prob-
ability of the existence of points based on the distance
to the sensor. The probability density function is com-
puted based on the observations of 100 point clouds.
It can be seen how, above 45 meters, the probabil-
ity of finding points is almost zero. Therefore, as a
solution, it was proposed to consider only the points
that are within a radius of 45 meters from the sensor
and, all the evaluations have been performed under
this condition.
4.5 Quantitative Evaluation
Figure 4 presents the results in terms of precision and
recall. For this purpose, inferences have been made
on all the point clouds that make up the test dataset.
The classification of each point inferred by the net-
work is compared with its ground truth, giving rise to
true positives, true negatives, false positives and false
negatives. Figures 4(a) and 4(c), present the results
in urban and structured environments corresponding
to SemanticKITTI and USL datasets. In both figures,
the precision-recall curve is very close to the maxi-
mum (upper right corner). Therefore we can assume
that the trained models learn the traversable and non-
traversable zones very consistently, achieving accu-
racy and recall values higher than 95% for certain
working points. Moreover, these curves show that the
performance of the network does not depend on the
discretization parameter v (size of voxel, or scale pa-
rameter), since very similar values are achieved.
On the other hand, Figure 4(b) presents the re-
sults when the method is applied to an unstructured
environment. As expected, the results suggest that
it is more difficult to correctly infer which areas are
traversable. Likewise, in this case, the discretization
of the point cloud space is a determining factor, since
differences in performance are observed depending
on this factor. The improvement of some voxels with
respect to others does not seem to follow a logical or-
der for these specific environments.
Table 1 shows in detail the performance met-
rics obtained according to the scale factor mentioned
above. It can be observed in a more analytical
way how the datasets describing urban environments
lead to very similar results (SemanticKITTI, Seman-
ticUSL). However, in highly unstructured datasets the
performance of the neural network is lower and more
dependent on the discretization of the point cloud.
Table 1: Results with different discretizations of the space
on the described databases.
Dataset Voxel F1 Acc. MIOU
Rellis3D
0.05
0.72 0.82 0.58
Kitti 0.97 0.97 0.94
USL 0.91 0.90 0.83
Rellis3D
0.1
0.72 0.83 0.57
Kitti 0.97 0.97 0.95
USL 0.93 0.93 0.87
Rellis3D
0.2
0.79 0.85 0.66
Kitti 0.97 0.97 0.94
USL 0.93 0.93 0.87
Rellis3D
0.35
0.79 0.86 0.66
Kitti 0.97 0.97 0.94
USL 0.95 0.95 0.91
Rellis3D
0.5
0.78 0.84 0.65
Kitti 0.97 0.97 0.93
USL 0.94 0.94 0.89
In addition, a comparison has been made with
other results found in the literature (Table 2). The
comparison presented in Table 2 includes different
methods focused on semantic segmentation. Accord-
ing to (Fusaro et al., 2023), the datasets were adapted
to a binary problem as we do in section 4.1.
Finally, an experiment was carried out with the
aim of demonstrating the invariance of the obtained
features. Figure 5 shows the variation of the precision
ICINCO 2023 - 20th International Conference on Informatics in Control, Automation and Robotics
388
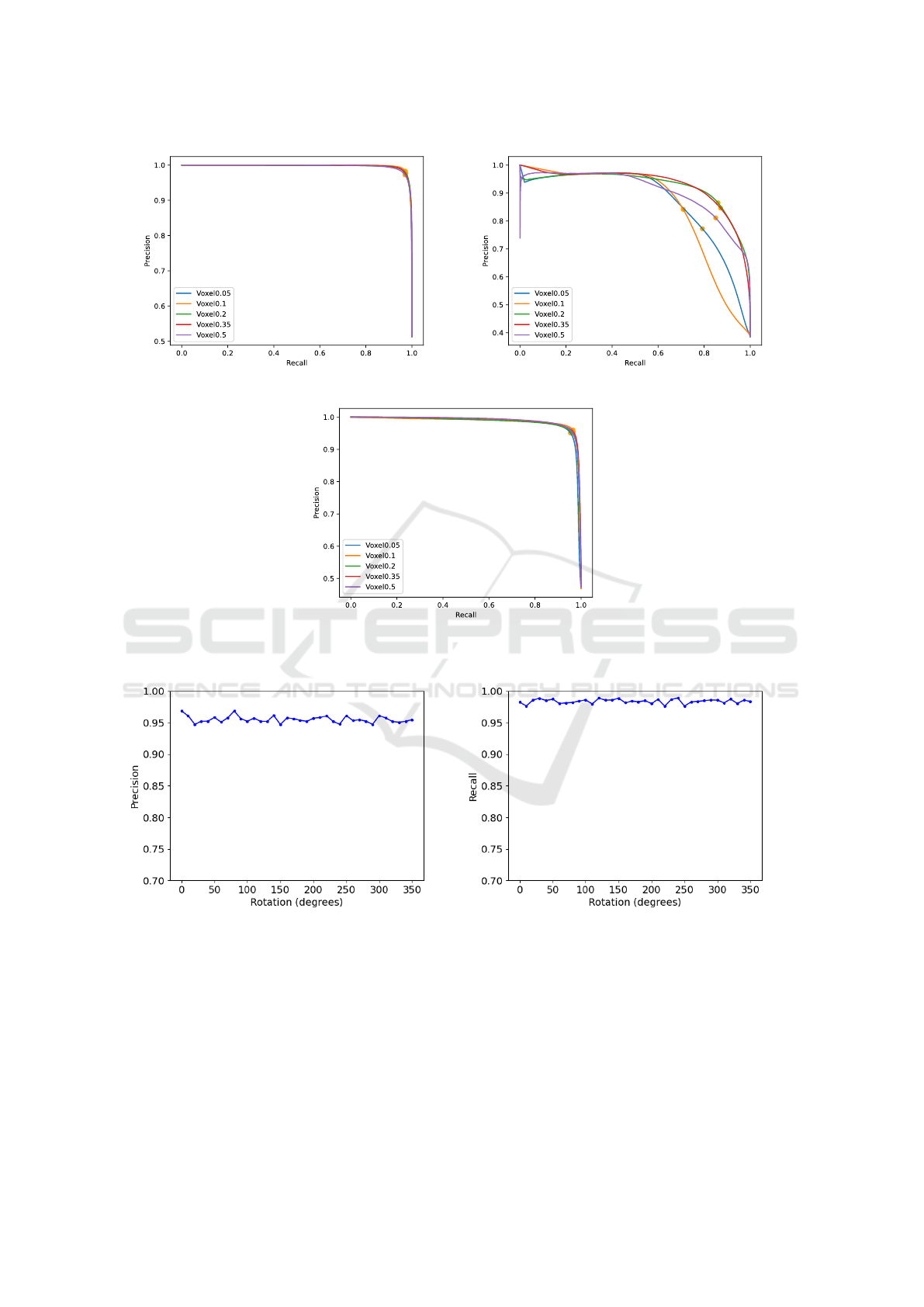
(a) P-R curve on the SemanticKITTI dataset. (b) P-R curve on the Rellis-3D dataset.
(c) P-R curve on the USLSemantic dataset.
Figure 4: Precision-Recall curves of network inference on test data.
(a) Precision metric in relation to rotation. (b) Recall metric in relation to rotation.
Figure 5: Rotationally invariant results.
and recall metrics of a point cloud rotated between 0
and 360 degrees. Ideally the graph should present a
completely horizontal line, however, due to the dif-
ferent discretization of the space when rotating, the
results vary very slightly, and it can be considered to
be invariant to rotation.
4.6 Qualitative Evaluation
In Figure 6, the results are presented in a visual form,
in which the parameters that compose the confusion
matrix are shown in different colors: true positives
(green), true negatives (purple), false positives (red)
and false negatives (orange). Figures 6(a), 6(c) and
6(e) represent a perfectly labeled point clouds of the
Computing the Traversability of the Environment by Means of Sparse Convolutional 3D Neural Networks
389

(a) Labeled point cloud from SemanticKITTI dataset.
(b) Network inference from SemanticKITTI dataset.
(c) Labeled point cloud Rellis-3D dataset.
(d) Network inference from Rellis-3D dataset.
(e) Labeled point cloud from USL dataset.
(f) Network inference from USL dataset.
Figure 6: Visual representation of the inference results of the network. Green: true positives (TP). Purple: true negatives
(TN). Red: false positives (FP). Orange: false negatives (FN).
different datasets with which the method has been
evaluated. On the other hand, Figure 6(b), 6(d) and
6(f) represent the neural network inferences with the
errors in orange and red and the hits in green and pur-
ICINCO 2023 - 20th International Conference on Informatics in Control, Automation and Robotics
390

(a) Original point cloud. (b) Point cloud rotated 45 degrees.
(c) Point cloud rotated 90 degrees.
Figure 7: Inference invariant to rotation.
Table 2: Results of different approaches on SemanticKITTI
sequences 0-10. With [1]: (Redmon and Farhadi, 2018),
[2]: (Wu et al., 2018), [3]: (Wu et al., 2019), [4]: (Qi et al.,
2017), [5]: (Fusaro et al., 2023).
Method Accuracy F1 mIoU
[1] 93.4 93.0 87.4
[2] 90.1 89.4 81.4
[3] 92.3 91.9 85.5
[4] 90.0 93.0 87.4
[5] 89.2 91.4 84.9
Ours 96.6 95.9 92.3
ple as described above. False positives tend to appear
in highly unstructured areas. False negatives appear
near the edges found between two adjacent geome-
tries.
At this point, it is important to consider that false
positives (classified by the network as traversable, but
which are really not traversable) are really dangerous
in a robot navigation task.
In the same way that before it has been shown that
the method is invariant to rotation in a general way,
we can directly observe this fact in Figure 7. This fig-
ure shows the inferences of the neural network for the
same point cloud rotated 45 and 90 degrees in Figures
7(b) and Figure 7(c) respectively.
5 CONCLUSION
In this paper have been presented a method for
traversability estimation in point clouds using a sparse
neural network with an encoder-decoder configura-
tion. An analysis in terms of voxel size has been per-
formed on different datasets.
The results obtained demonstrate a high robust-
ness of the solution both in highly structured and nat-
ural environments and improve the results of the ap-
proaches that are found in the literature. In particular,
the study shows that the estimation of traversability
performs very well in semi-structured environments
(SemanticKITTI, SemanticUSL). It is a more compli-
cated task in highly disordered natural environments
(Rellis-3D). It has also been shown that the results are
invariant to changes in rotation in the same environ-
ment, giving rise to small variations that do not gen-
erally affect the assessment of the traversability of the
space.
As future work, we plan to merge the visual in-
formation with the LiDAR representation to make the
method more consistent. In addition, we plan to test
the neural network on different robots with different
sensors. Finally, we plan to address the problem of
space traversability under a continuous (non-binary)
paradigm that depends in some way also on the phys-
ical characteristics of the robot and not only on the
terrain.
Computing the Traversability of the Environment by Means of Sparse Convolutional 3D Neural Networks
391

ACKNOWLEDGEMENTS
This work has been funded by the ValgrAI
Foundation, Valencian Graduate School and Re-
search Network of Artificial Intelligence through
a predoctoral grant. In addition, this publica-
tion is part of the project TED2021-130901B-I00,
funded by MCIN/AEI/10.13039/501100011033 and
by the European Union “NextGenerationE”/PRTR”
and of the projects PROMETEO/2021/075, and
GIGE/2021/150, funded by the Generalitat Valen-
ciana.
REFERENCES
Bellone, M., Reina, G., Caltagirone, L., and Wahde, M.
(2017). Learning traversability from point clouds in
challenging scenarios. IEEE Transactions on Intelli-
gent Transportation Systems, 19(1):296–305.
Chen, Z., Zhang, J., and Tao, D. (2019). Progressive lidar
adaptation for road detection. IEEE/CAA Journal of
Automatica Sinica, 6(3):693–702.
Choy, C., Gwak, J., and Savarese, S. (2019). 4D spatio-
temporal convnets: Minkowski convolutional neural
networks. In Proceedings of the IEEE/CVF con-
ference on computer vision and pattern recognition,
pages 3075–3084.
Fan, R., Wang, H., Cai, P., and Liu, M. (2020). Sne-
roadseg: Incorporating surface normal information
into semantic segmentation for accurate freespace de-
tection. In European Conference on Computer Vision,
pages 340–356. Springer.
Frey, J., Hoeller, D., Khattak, S., and Hutter, M. (2022). Lo-
comotion policy guided traversability learning using
volumetric representations of complex environments.
In 2022 IEEE/RSJ Int. Conf. on Intelligent Robots and
Systems (IROS), pages 5722–5729. IEEE.
Fusaro, D., Olivastri, E., Evangelista, D., Imperoli, M.,
Menegatti, E., and Pretto, A. (2023). Pushing the
limits of learning-based traversability analysis for au-
tonomous driving on cpu. In Intelligent Autonomous
Systems 17: Proceedings of the 17th Int. Conf. IAS-17,
pages 529–545. Springer.
Geiger, A., Lenz, P., and Urtasun, R. (2012). Are we ready
for autonomous driving? the kitti vision benchmark
suite. In 2012 IEEE conference on computer vision
and pattern recognition, pages 3354–3361. IEEE.
Gu, S., Zhang, Y., Tang, J., Yang, J., and Kong, H. (2019).
Road detection through crf based lidar-camera fusion.
In 2019 International Conference on Robotics and Au-
tomation (ICRA), pages 3832–3838. IEEE.
Han, L., Gao, F., Zhou, B., and Shen, S. (2019). Fiesta:
Fast incremental euclidean distance fields for online
motion planning of aerial robots. In 2019 IEEE/RSJ
Int. Conf. on Intelligent Robots and Systems (IROS),
pages 4423–4430. IEEE.
He, K., Zhang, X., Ren, S., and Sun, J. (2016). Deep resid-
ual learning for image recognition. In Proceedings of
the IEEE conference on computer vision and pattern
recognition, pages 770–778.
Hornung, A., Wurm, K. M., Bennewitz, M., Stachniss, C.,
and Burgard, W. (2013). Octomap: An efficient prob-
abilistic 3D mapping framework based on octrees. Au-
tonomous robots, 34:189–206.
Jiang, P., Osteen, P., Wigness, M., and Saripalli, S. (2021).
Rellis-3D dataset: Data, benchmarks and analysis.
In 2021 IEEE Int. Conf. on robotics and automation
(ICRA), pages 1110–1116. IEEE.
Jiang, P. and Saripalli, S. (2021). Lidarnet: A boundary-
aware domain adaptation model for point cloud se-
mantic segmentation. In 2021 IEEE Int. Conf. on
Robotics and Automation (ICRA), pages 2457–2464.
IEEE.
Kragh, M., Jørgensen, R. N., and Pedersen, H. (2015). Ob-
ject detection and terrain classification in agricultural
fields using 3D lidar data. In Computer Vision Sys-
tems: 10th Int. Conf., ICVS 2015, Copenhagen, Den-
mark, July 6-9, 2015, Proceedings, pages 188–197.
Springer.
Langer, D., Rosenblatt, J., and Hebert, M. (1994). A
behavior-based system for off-road navigation. IEEE
Transactions on Robotics and Automation, 10(6):776–
783.
Martinez, J. L., Moran, M., Morales, J., Robles, A., and
Sanchez, M. (2020). Supervised learning of natural-
terrain traversability with synthetic 3D laser scans.
Applied Sciences, 10(3):1140.
Moravec, H. and Elfes, A. (1985). High resolution maps
from wide angle sonar. In Proceedings. 1985 IEEE
Int. Conf. on robotics and automation, volume 2,
pages 116–121. IEEE.
Oleynikova, H., Taylor, Z., Fehr, M., Siegwart, R., and Ni-
eto, J. (2017). Voxblox: Incremental 3D euclidean
signed distance fields for on-board mav planning. In
2017 IEEE/RSJ Int. Conf. on Intelligent Robots and
Systems (IROS), pages 1366–1373. IEEE.
Qi, C. R., Su, H., Mo, K., and Guibas, L. J. (2017). Point-
net: Deep learning on point sets for 3D classification
and segmentation. In Proceedings of the IEEE con-
ference on computer vision and pattern recognition,
pages 652–660.
Razani, R., Cheng, R., Taghavi, E., and Bingbing, L.
(2021). Lite-hdseg: Lidar semantic segmentation us-
ing lite harmonic dense convolutions. In 2021 IEEE
Int. Conf. on Robotics and Automation (ICRA), pages
9550–9556. IEEE.
Redmon, J. and Farhadi, A. (2018). Yolov3: An incremental
improvement. arXiv preprint arXiv:1804.02767.
Ronneberger, O., Fischer, P., and Brox, T. (2015). U-
net: Convolutional networks for biomedical image
segmentation. In Medical Image Computing and
Computer-Assisted Intervention–MICCAI 2015: 18th
Int. Conf., Munich, Germany, October 5-9, 2015, Pro-
ceedings, Part III 18, pages 234–241. Springer.
Vapnik, V. (1999). The nature of statistical learning theory.
Springer science & business media.
ICINCO 2023 - 20th International Conference on Informatics in Control, Automation and Robotics
392

Velas, M., Spanel, M., Hradis, M., and Herout, A. (2018).
CNN for very fast ground segmentation in velodyne
lidar data. In 2018 IEEE Int. Conf. on Autonomous
Robot Systems and Competitions (ICARSC), pages
97–103. IEEE.
Wang, P.-S., Liu, Y., Guo, Y.-X., Sun, C.-Y., and Tong, X.
(2017). O-CNN: Octree-based convolutional neural
networks for 3D shape analysis. ACM Transactions
On Graphics (TOG), 36(4):1–11.
Wellhausen, L., Dosovitskiy, A., Ranftl, R., Walas, K., Ca-
dena, C., and Hutter, M. (2019). Where should i
walk? predicting terrain properties from images via
self-supervised learning. IEEE Robotics and Automa-
tion Letters, 4(2):1509–1516.
Wu, B., Wan, A., Yue, X., and Keutzer, K. (2018). Squeeze-
seg: Convolutional neural nets with recurrent crf
for real-time road-object segmentation from 3D lidar
point cloud. In 2018 IEEE Int. Conf. on robotics and
automation (ICRA), pages 1887–1893. IEEE.
Wu, B., Zhou, X., Zhao, S., Yue, X., and Keutzer, K. (2019).
Squeezesegv2: Improved model structure and unsu-
pervised domain adaptation for road-object segmenta-
tion from a lidar point cloud. In 2019 Int. Conf. on
Robotics and Automation (ICRA), pages 4376–4382.
IEEE.
Xiao, X., Liu, B., Warnell, G., and Stone, P. (2022). Motion
planning and control for mobile robot navigation us-
ing machine learning: a survey. Autonomous Robots,
46(5):569–597.
Zhou, Q.-Y., Park, J., and Koltun, V. (2018). Open3d: A
modern library for 3d data processing. arXiv preprint
arXiv:1801.09847.
Computing the Traversability of the Environment by Means of Sparse Convolutional 3D Neural Networks
393
