
Evaluating Deep Learning Assisted Automated Aquaculture Net Pens
Inspection Using ROV
Waseem Akram, Muhayyuddin Ahmed, Lakmal Seneviratne and Irfan Hussain
Khalifa University Center for Autonomous Robotic Systems (KUCARS), Khalifa University, U.A.E.
Keywords:
Aquaculture, Net Defect Detection, Deep Learning, Marine Vehicle.
Abstract:
In marine aquaculture, inspecting sea cages is an essential activity for managing both the facilities’ environ-
mental impact and the quality of the fish development process. Fish escape from fish farms into the open
sea due to net damage, which can result in significant financial losses and compromise the nearby marine
ecosystem. The traditional inspection system in use relies on visual inspection by expert divers or Remotely
Operated Vehicles (ROVs), which is not only laborious, time-consuming, and inaccurate but also largely de-
pendent on the level of knowledge of the operator and has a poor degree of verifiability. This article presents
a robotic-based automatic net defect detection system for aquaculture net pens oriented to on-ROV process-
ing and real-time detection. The proposed system takes a video stream from an onboard camera of the ROV,
employs a deep learning detector, and segments the defective part of the image from the background under
different underwater conditions. The system was first tested using a set of collected images for comparison
with the state-of-the-art approaches and then using the ROV inspection sequences to evaluate its effectiveness
in real-world scenarios. Results show that our approach presents high levels of accuracy even for adverse
scenarios and is adequate for real-time processing on embedded platforms.
1 INTRODUCTION
Marine aquaculture has become an essential part of
meeting the growing demand for high-quality pro-
tein while also preserving the ocean environment (Gui
et al., 2019). There are various types of marine aqua-
culture facilities, such as deep-sea cage farming, raft
farming, deep-sea platform farming, and net enclo-
sure farming (Yan et al., 2018). Advancements in
engineering and construction have significantly im-
proved the wave resistance of aquaculture facilities
like cages and net enclosures (Zhou et al., 2018).
However, the netting used in these facilities is a cru-
cial component that is easily damaged and difficult
to detect, leading to the escape of cultured fish and
causing substantial economic losses every year. The
detection of net damage is currently impeding the de-
velopment of marine aquaculture facility (Wei et al.,
2020).
At present, the standard practice for identifying
damage in sea cages involves human visual inspec-
tion, which can be carried out directly by professional
divers or remotely by observing video feeds captured
with Remotely Operated Vehicles (ROVs) (Wei et al.,
2020) as shown in Figure 1. However, relying on
(a) ROV. (b) Net hole.
(c) Plastic. (d) Vegetation.
Figure 1: Automatic aquaculture inspection using ROV. (a)
shows an ROV during aquaculture net pens inspection, (b)
shows an example of the hole on the net, (c) shows an ex-
ample of plastic entangled on the net, and (d) shows an
example of vegetation attached to the net. Courtesy of
(Roboflow, 2022).
professional divers for inspections can be expensive,
time-consuming, and poses safety risks. Furthermore,
it provides low coverage, verifiability, and repeatabil-
ity (Akram et al., 2022). In contrast, analyzing images
586
Akram, W., Ahmed, M., Seneviratne, L. and Hussain, I.
Evaluating Deep Learning Assisted Automated Aquaculture Net Pens Inspection Using ROV.
DOI: 10.5220/0012160900003543
In Proceedings of the 20th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2023) - Volume 1, pages 586-591
ISBN: 978-989-758-670-5; ISSN: 2184-2809
Copyright © 2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)

captured by ROVs equipped with different types of
cameras eliminates safety risks and offers the poten-
tial to implement computer-assisted damage detection
procedures through computer vision techniques. Re-
cent developments have shown the use of deep learn-
ing approaches (Sun et al., 2020; Yang et al., 2021)
such as Mask R-RCNN (He et al., ), Fast-RCNN (Gir-
shick et al., 2015), YOLO (Jocher et al., 2022), and
SSD (Liu et al., 2016) for automatic aquaculture net
damage detection.
Various sensor modalities, such as cameras or
acoustic-based sensors, are used for automatic inspec-
tion operations of net cage structure integrity. Com-
puter vision-based approach, such as (Zhang et al.,
2022) proposed by Zhang et al. uses Mask-RCNN
(He et al., ) for net hole detection problems in a lab-
oratory setup. The experimental results demonstrated
an Average Precision score of 94.48%. Similarly,
Liao et al. (Liao et al., 2022) proposed a MobileNet-
SSD network model for hole detection in open-sea
fish cages. In this work, net hole detection is per-
formed by fusing MobileNet with the SSD network
model. The results showed an average precision score
of 88.5%. Tao et al. (Tao et al., 2018), applied deep
learning to detect net holes using the YOLOv1 (You
Only Look Once) algorithm on images captured un-
der controlled lab conditions. In contrast, Madshaven
et al. (Madshaven et al., 2022), employed a combi-
nation of classical computer vision and image pro-
cessing techniques for tracking, alongside neural net-
works for segmenting the net structure and classify-
ing scene content, including the detection of irregu-
larities caused by fish or seaweed. Qiu et al. (Qiu
et al., 2020), utilized image-enhancing methods for
net structure analysis and marine growth segmenta-
tion.
In previous literature on aquaculture inspection
and monitoring perspective, most of the studies have
focused on the hole detection problem. However,
apart from the net hole, other serious problems can
damage the net structure. For example, vegetation
can grow and become attached to the net pens and
cause fouling, which can reduce water flow and oxy-
genation. They can also damage the net which in-
creases the risk of escape for the fish. In addition,
plastic waste can entangle and harm fish, reduce wa-
ter flow and oxygenation, and leach harmful chemi-
cals into the water. To mitigate the negative effects of
net holes, vegetation, and plastic waste on aquaculture
net pens, it is important to implement proper net de-
fect detection methods to perform regular inspection
and monitoring activity to prevent the accumulation
and damage of these net abnormalities.
1.1 Contributions
This paper introduces deep learning coupled with the
ROV method that focuses on detecting irregularities
in aquaculture net pens, which is a critical task within
the full inspection process. The method proposed
in this paper employs a deep learning-based detector
to identify areas where potential net defects such as
plants, holes, and plastic exist in the net structure. We
have evaluated different variants of the YOLO deep
learning model to identify the net defects in real time
using the ROV. The proposed approach leverages tra-
ditional computer vision and image processing meth-
ods and works under realistic lighting conditions. The
method has been tested at a lab setup for fish nets of
10x10m long mesh placed in the pool.
2 PROPOSED METHOD
Our proposed method for identifying net damage
involves utilizing both image and video processing
techniques in a cohesive workflow. The approach
aims to identify and track net defects such as vege-
tation, holes, and plastic in the aqua-net. To achieve
this, an ROV named Blueye Pro ROV X, equipped
with an HD camera is utilized to conduct a controlled
inspection campaign in the Marine Pool at Khalifa
University, UAE. The camera remains at a fixed dis-
tance from the area of interest throughout the inspec-
tion, with the option to adjust the distance as needed.
The net is 10x10m long mesh placed in the pool
where vegetation and plastic are attached to the net.
In addition, there are net holes at different location on
the net surface. The net is spread around the side of
the pool, and the ROV is allowed to inspect the net at
constant speed to record the experimental data.
The ROV as shown in Figure 2, has six thrusters
and is equipped with Doppler Velocity Log (DVL),
Inertial Measurement Unit (IMU), and camera sensor.
The ROV can operate in saltwater, brackish water, or
freshwater for up to 2 hours on a charge and can de-
scend to a depth of 300 meters when tethered by a
cable measuring 400 meters in length. In addition, a
forward-facing camera capable of 25-30 frames per
second (fps) in full HD has been placed for use in
making high-quality video streams of the surrounding
area. The captured video feed is then used as input for
the processing flow.
The video that was captured has dimensions of
1920 x 1080 and a frame rate of 30 frames per sec-
ond. To extract image sequences of a total of 510, we
captured one frame every five seconds from the video.
For training, we utilized 90% images from the dataset,
Evaluating Deep Learning Assisted Automated Aquaculture Net Pens Inspection Using ROV
587

Figure 2: The Blueye Prov ROV x deployed for aqua-net
inspection.
while the remainder was allocated for testing.
To validate and show the effectiveness of the
method, the ROV is subjected to perform the real-time
detection of the aqua net defects. To achieve this, we
deploy the ROV in the pool. The initial position of the
ROV is at a constant distance parallel to the net. The
ROV communicates with the surface computer via a
tether line for video transmission. Moreover, the ROV
moment is manually controlled through a remote con-
troller. The online camera recording was then used on
the surface computer and given to the detector mod-
ule. The detector module was allowed to display the
detection along with a bounding box.
2.1 Detection Approaches
Deep learning models have proven to be highly effec-
tive in detecting and precisely locating the affected re-
gion within an input image. Numerous cutting-edge
models have been introduced in the research literature
to address this task. In our study, we conducted tests
and evaluations on several widely employed detection
models, namely YOLOv4 (Bochkovskiy et al., 2020),
YOLOv5 (Jocher et al., 2022), YOLOv7 (Wang et al.,
2023), and YOLOv8 (Jocher et al., 2023), to identify
and localize vegetation, plastic, and holes using the
Aqua-Net detection method.
YOLOv4 represents an enhanced iteration of
YOLOv3, surpassing it in terms of mean average pre-
cision (mAP) and FPS. It is recognized as a one-stage
object detection approach, which comprises three key
components: backbone, neck, and head. The back-
bone component, referred to as CSPDarknet53, is
a pre-trained Convolutional Neural Network (CNN)
with 53 CNN layers. Its principal objective is to ex-
tract features and generate feature maps from the in-
put images. The neck component incorporates spatial
pyramid pooling (SPP) and a path aggregation net-
work (PAN), linking the backbone to the head. Lastly,
the head component processes the aggregated features
and makes predictions regarding bounding boxes and
classification.
The architecture of YOLOv5 is based on a back-
bone network, typically a CNN, which extracts fea-
tures from the input image. These features are then
passed through several additional layers, including
convolutional, upsampling, and fusion layers, to gen-
erate high-resolution feature maps. The model further
utilizes anchor boxes, which are pre-defined boxes of
various sizes and aspect ratios, to predict bounding
boxes for objects. YOLOv5 predicts the coordinates
of bounding boxes relative to the grid cells and re-
fines them with respect to anchor boxes. To train the
YOLOv5 model, a large labeled dataset is required,
along with bounding box annotations for the objects
of interest. The model is trained using techniques like
backpropagation and gradient descent to optimize the
network parameters and improve object detection per-
formance. YOLOv5 offers different model sizes (e.g.,
YOLOv5s, YOLOv5m, YOLOv5l, and YOLOv5x)
that vary in terms of depth and computational com-
plexity. These different variants provide a trade-off
between speed and accuracy, allowing users to choose
the model that suits their specific requirements.
Yolov7s represents a compact variant of YOLOv7,
which is an improved version of YOLOv6 in terms of
mean average precision (mAP), detection speed, and
inference performance. YOLOv7 introduces an ex-
tension of the Efficient Layer Aggregation Network
(ELAN) called extended ELAN (EELAN). The net-
work incorporates various fundamental techniques,
such as expand, shuffle, and merge, to enhance its
learning capability without disrupting the gradient
flow. These enhancements are aimed at improving
the network’s performance while maintaining its ef-
ficiency and preserving the flow of gradients. In ad-
dition, YOLOv7 also emphasizes the utilization of
methods such as trainable ”bag-of-freebies” and op-
timization modules. The model incorporates differ-
ent computational blocks to extract more distinct fea-
tures. These feature maps from each computational
block are grouped into sets of a specific size, denoted
as ”s,” and subsequently concatenated. Finally, the
cardinality is merged by shuffling the group feature
map, completing the overall process.
The YOLOv8n model, as the nano edition of the
YOLOv8 family, stands out for its compact size, ex-
ceptional speed, and improved detection capabilities.
It is particularly well-suited for object detection and
classification tasks. Moreover, when combined with
instance segmentation and object tracking techniques,
it proves to be at the forefront of the State-of-the-Art
(SOTA), delivering advanced performance in various
computer vision applications. The model is charac-
terized as anchor-free, indicating that instead of esti-
ICINCO 2023 - 20th International Conference on Informatics in Control, Automation and Robotics
588

mating the deviation from a predefined anchor box,
it directly predicts the center point of an object in
an image. In YOLOv8, image augmentation is per-
formed at each epoch to enhance the training pro-
cess. The technique employed is mosaic augmenta-
tion, where four images are stitched together to cre-
ate a mosaic, thereby encouraging the model to learn
from new spatial arrangements. One notable change
in the YOLOv8 architecture is the replacement of the
c3 module with the c2f module. In the c2f module,
the outputs from Bottleneck layers are concatenated,
whereas in the previous c3 module, only the output
from the last Bottleneck layer was utilized. Addition-
ally, the first set of 6x6 convolutional layers in the
Backbone module is substituted with a 3x3 convolu-
tional block, bringing about a structural modification
in YOLOv8.
3 IMPLEMENTATION AND
EXPERIMENTAL SETUP
In order to perform the aquaculture net defect de-
tection including vegetation, plastic, and net holes,
the system is tested in real-time using ROV. The ex-
perimental environment is developed on a core i9-
10940@3.30 GHz processor, 128GB RAM, and a sin-
gle NVIDIA Quadro RTX 6000 GPU equipped with
a CUDA toolkit. Python version 3.8.10 was utilized,
alongside the PyTorch 1.13.1 cuda 11.7 framework.
Additionally, the model underwent training for 300
epochs, with each epoch consisting of 512 iterations.
The collected images having a resolution of 1920 x
1080 pixels are annotated by the LabelImg annotation
tool, and the TXT annotation file in YOLO format is
created, then the ratio of training set and testing set is
set to 9:1.
4 RESULTS AND DISCUSSIONS
The best-trained model was analyzed and embed-
ded on the ROV for real-time detection which helps
the user to timely detect the aqua-net defects within
aquaculture. First, the experimental results of the
YOLOv4, YOLOv5, YOLOv7, and YOLOv8 are
shown in Table 1. According to Table 1, YOLOv5
has an advantage over other YOLO model variants in
terms of mAP metrics. YOLOv4 showed a better pre-
cision score than the other models. In terms of Recall,
YOLOv4 has achieved a 100% precision score. Simi-
larly, a higher F1 score was achieved by all models. It
is noted that the YOLOV7 has less detection perfor-
Table 1: Performance of YOLOV detectors.
Detector mAP Precision Recall F1 score
YOLOv4 0.9901 0.9998 0.9980 0.9990
YOLOv5 0.9950 0.9895 0.9901 0.9922
YOLOv7 0.9656 0.9698 0.9006 0.9290
YOLOv8 0.9946 0.9766 0.9998 0.9881
mance compared to other YOLO variants.
The aqua-net detection visualization results are
shown in Figure 3. Here, the analysis was performed
to view the detected aqua-net defects i.e., plant, holes,
and plastic after training the YOLOv5 model. The
model was deployed on the unseen real-time images
in a pool set up to check the feasibility of the model
after training on the collected custom dataset. The
threshold value was set to 0.3, which means if the
confidence score is greater or equal to 30% then the
model categorizes it into the relevant class. In some
cases, the percentage of defections is a little lower.
The performance variation is due to the presence of
different inputs in real time. Moreover, the model
showed the ability to detect the net defect of differ-
ent sizes as can be noted in Figure 3.
Moreover, the performance of the detection
yolov5 model is shown in Figures 4, 5, and 6 in terms
of F1 curve, Precision curve, and Recall curve. In
Figure 4, among all three classes i.e., plant, hole, and
plastic, the hole class achieved higher at the start,
while the plastic class has the advantage over the oth-
ers after training completion. However, the plant class
achieved fewer scores than the others. Furthermore,
it is seen that the F1 scores of all classes are non
significantly different from each other. The Recall
curve as shown in Figure 5 demonstrates better de-
tection performance for both plastic and hole classes.
Similarly, the precision curve as shown in Figure 6
also demonstrated better detection performance for all
three classes i.e., plant, hole, and plastic aqua-net de-
fects. It can also be noted that as the confidence level
reaches 0.741, the Precision of 100% is achieved by
the adopted model. The obtained results indicate the
effectiveness of the YOLOv5 detector for the aqua-
net defect detection tasks.
To further evaluate the detection performance of
our current research, we took into account the stud-
ies conducted by Zhang et al. in (Zhang et al., 2022)
and Liao et al. in (Liao et al., 2022). In the domain
of computer vision, Zhang et al. introduced a method
that utilizes Mask-RCNN (He et al., ) to address the
net hole detection problem within a controlled labo-
ratory environment. Their experimental findings ex-
hibited an Average Precision score of 94.48%. Sim-
ilarly, Liao et al. proposed a network model called
MobileNet-SSD for detecting holes in fish cages lo-
cated in open-sea environments. In their work, net
Evaluating Deep Learning Assisted Automated Aquaculture Net Pens Inspection Using ROV
589

Figure 3: Example of successful detection of aqua-net defects using YOLOv5.
Figure 4: Performance evaluation of the model through F1
curve.
hole detection is achieved by combining MobileNet
with the SSD network model. The results demon-
strated an average precision score of 88.5%. Our
study employed YOLOv4, YOLOv5, YOLOv7, and
YOLOv8 models to detect aqua-net defects, and we
achieved a 99% performance across all metrics, in-
cluding mAP, precision, recall, and F1 score. These
results are presented in Table 1.
5 CONCLUSIONS
In this research paper, we introduce the utilization
of YOLO-aqua-net models for detecting plant, holes,
Figure 5: Performance evaluation of the model through Re-
call curve.
and plastic within an aquaculture environment. The
study involved the use of datasets acquired from a
laboratory setup, where an ROV was employed to
gather, test, and validate the proposed approach. Deep
learning models based on YOLOV architecture were
trained and evaluated to detect various defects in
aqua-nets. The results demonstrate that all variations
of YOLO models exhibit better real-time detection of
aqua-net defects, making them suitable for real-time
inspection tasks in aquaculture net pens.
ICINCO 2023 - 20th International Conference on Informatics in Control, Automation and Robotics
590
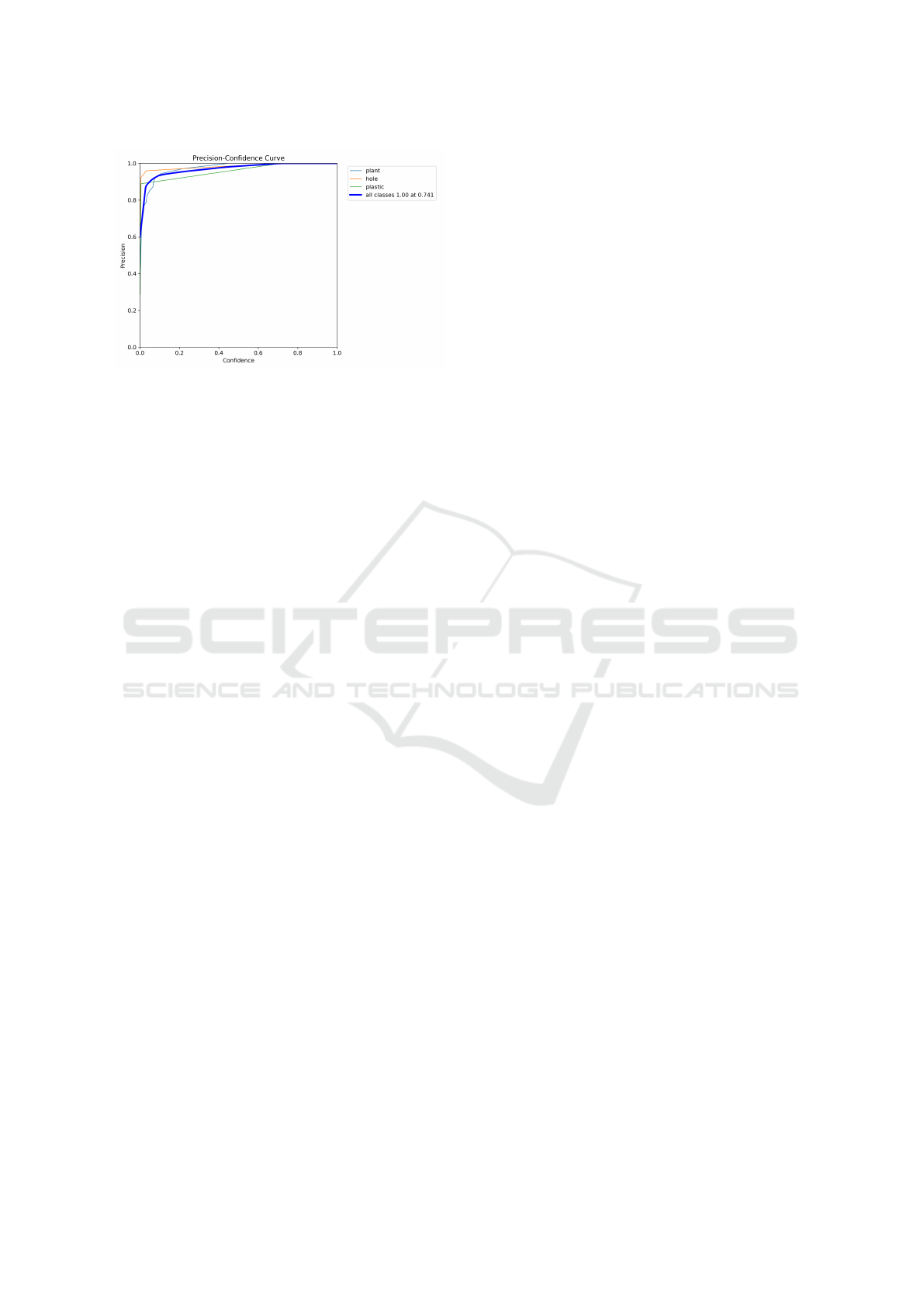
Figure 6: Performance evaluation of the model through Pre-
cision curve curve.
ACKNOWLEDGEMENTS
This publication is based upon work supported by the
Khalifa University of Science and Technology under
Award No. CIRA-2021-085, FSU-2021-019, RC1-
2018-KUCARS.
REFERENCES
Akram, W., Casavola, A., Kapetanovi
´
c, N., and Mi
ˇ
skovic,
N. (2022). A visual servoing scheme for autonomous
aquaculture net pens inspection using rov. Sensors,
22(9):3525.
Bochkovskiy, A., Wang, C.-Y., and Liao, H.-Y. M. (2020).
YOLOv4: Optimal Speed and Accuracy of Object De-
tection. arXiv, 2020.
Girshick, R. et al. (2015). Fast R-CNN. ICCV, 2015.
Gui, F., Zhu, H., and Feng, D. (2019). Research progress
on hydrodynamic characteristics of marine aquacul-
ture netting. Fish. Mod, 46:9–14.
He, K., Gkioxari, G., Dollar, P., and Girshick, R. Mask
R-CNN. IEEE International Conference on Computer
Vision (ICCV), 2017.
Jocher, G., Chaurasia, A., and Qiu, J. (2023). Yolo by ultr-
alytics.
Jocher, G., Chaurasia, A., Stoken, A., Borovec, J.,
NanoCode012, Kwon, Y., Michael, K., TaoXie, Fang,
J., imyhxy, Lorna, Yifu, Z., Wong, C., V, A., Montes,
D., Wang, Z., Fati, C., Nadar, J., Laughing, UnglvK-
itDe, Sonck, V., tkianai, yxNONG, Skalski, P., Hogan,
A., Nair, D., Strobel, M., and Jain, M. (2022). ultralyt-
ics/yolov5: v7.0 - YOLOv5 SOTA Realtime Instance
Segmentation.
Liao, W., Zhang, S., Wu, Y., An, D., and Wei, Y. (2022). Re-
search on intelligent damage detection of far-sea cage
based on machine vision and deep learning. Aquacul-
tural Engineering, 96:102219.
Liu, W., Anguelov, D., Erhan, D., Szegedy, C., Reed, S.,
Fu, C.-Y., and Berg, A. C. (2016). SSD: Single Shot
MultiBox Detector. ECCV, 2016.
Madshaven, A., Schellewald, C., and Stahl, A. (2022). Hole
detection in aquaculture net cages from video footage.
In Fourteenth International Conference on Machine
Vision (ICMV 2021), volume 12084, pages 258–267.
SPIE.
Qiu, W., Pakrashi, V., and Ghosh, B. (2020). Fishing
net health state estimation using underwater imaging.
Journal of Marine Science and Engineering, 8(9):707.
Roboflow (2022). Net Defect Detection Dataset-v1. Re-
trieved: December 14th, 2022.
Sun, M., Yang, X., and Xie, Y. (2020). Deep learning in
aquaculture: A review. J. Comput, 31(1):294–319.
Tao, Q., Huang, K., Qin, C., Guo, B., Lam, R., and
Zhang, F. (2018). Omnidirectional surface vehicle for
fish cage inspection. In OCEANS 2018 MTS/IEEE
Charleston, pages 1–6. IEEE.
Wang, C.-Y., Bochkovskiy, A., and Liao, H.-Y. M. (2023).
Yolov7: Trainable bag-of-freebies sets new state-of-
the-art for real-time object detectors. In Proceedings
of the IEEE/CVF Conference on Computer Vision and
Pattern Recognition, pages 7464–7475.
Wei, Y., Wei, Q., and An, D. (2020). Intelligent monitor-
ing and control technologies of open sea cage culture:
A review. Computers and electronics in agriculture,
169:105119.
Yan, G., Ni, X., and Mo, J. (2018). Research status and
development tendency of deep sea aquaculture equip-
ments: a review. Journal of Dalian Ocean University,
33(1):123–129.
Yang, X., Zhang, S., Liu, J., Gao, Q., Dong, S., and Zhou,
C. (2021). Deep learning for smart fish farming: ap-
plications, opportunities and challenges. Reviews in
Aquaculture, 13(1):66–90.
Zhang, Z., Gui, F., Qu, X., and Feng, D. (2022). Net-
ting damage detection for marine aquaculture facili-
ties based on improved mask r-cnn. Journal of Marine
Science and Engineering, 10(7):996.
Zhou, W., Shi, J., Yu, W., Liu, F., Song, W., Gui, F., and
Yang, F. (2018). Current situation and development
trend of marine seine culture in china. Fish. Inf. Strat-
egy, 33:259–266.
Evaluating Deep Learning Assisted Automated Aquaculture Net Pens Inspection Using ROV
591
