Robot Path Planning with Safety Zones
Evis Plaku
1 a
, Arben C¸ ela
1,2 b
and Erion Plaku
3 c
1
AI Laboratory, Tirana Metropolitan University, Sotir Kolea Street, Tirana, Albania
2
Laboratory of Images, Signals, and Intelligent Systems, ESIEE Paris, Noisy-le-Grand CEDEX, France
3
Department of Computer Science, George Mason University, Fairfax, Virginia, U.S.A.
Keywords:
Robot Path Planning, Safety Zones.
Abstract:
Path planning is essential for guiding a robot to its destination while avoiding obstacles. In practical scenarios,
the robot is often required to remain within predefined safe areas during navigation. This allows the robot
to divert from its main path during emergencies and follow alternative routes to a safety center. This paper
introduces a novel method to incorporate safety zones into path planning. Each zone is defined by a central
point and a radius. Our approach efficiently plans paths to the goal, ensuring that the robot can reach a
safety center without having to travel more than the radius of the safety zone. Using sampling, our approach
constructs a roadmap with navigation routes and identifies safe locations that satisfy the distance requirements
for reaching a safety center. The safe portion of the roadmap is then searched to find a path to the goal.
We demonstrate the effectiveness of our approach through simulated experiments in obstacle-rich 2D and 3D
environments, utilizing car and blimp robot models.
1 INTRODUCTION
Path planning plays a crucial role in ensuring that
a robot can successfully reach its destination while
avoiding collisions (Choset et al., 2005). To enhance
safety, a practical approach is to require the robot to
adhere to designated safe areas so that it can promptly
respond to emergencies by diverting from its intended
path and following alternative routes to safety centers.
This is imperative for reducing potential risks and en-
suring the safety of the robot and its surroundings.
Path planning with safety zones holds potential
for diverse domains. Robots in industrial settings or
search-and-rescue missions could utilize path plan-
ning with safety zones to navigate hazardous envi-
ronments or unstable terrains. Autonomous vehicles
could employ safety zones for lane adherence, ob-
stacle response, and handling unpredictable behavior.
Healthcare robots could adhere to safety zones to pri-
oritize patient and staff well-being while delivering
supplies and performing tasks. Overall, the adoption
of path planning with safety zones could enhance re-
liability, efficiency, and safety across domains.
a
https://orcid.org/0009-0002-4042-2673
b
https://orcid.org/0000-0001-5708-1743
c
https://orcid.org/0000-0002-6622-386X
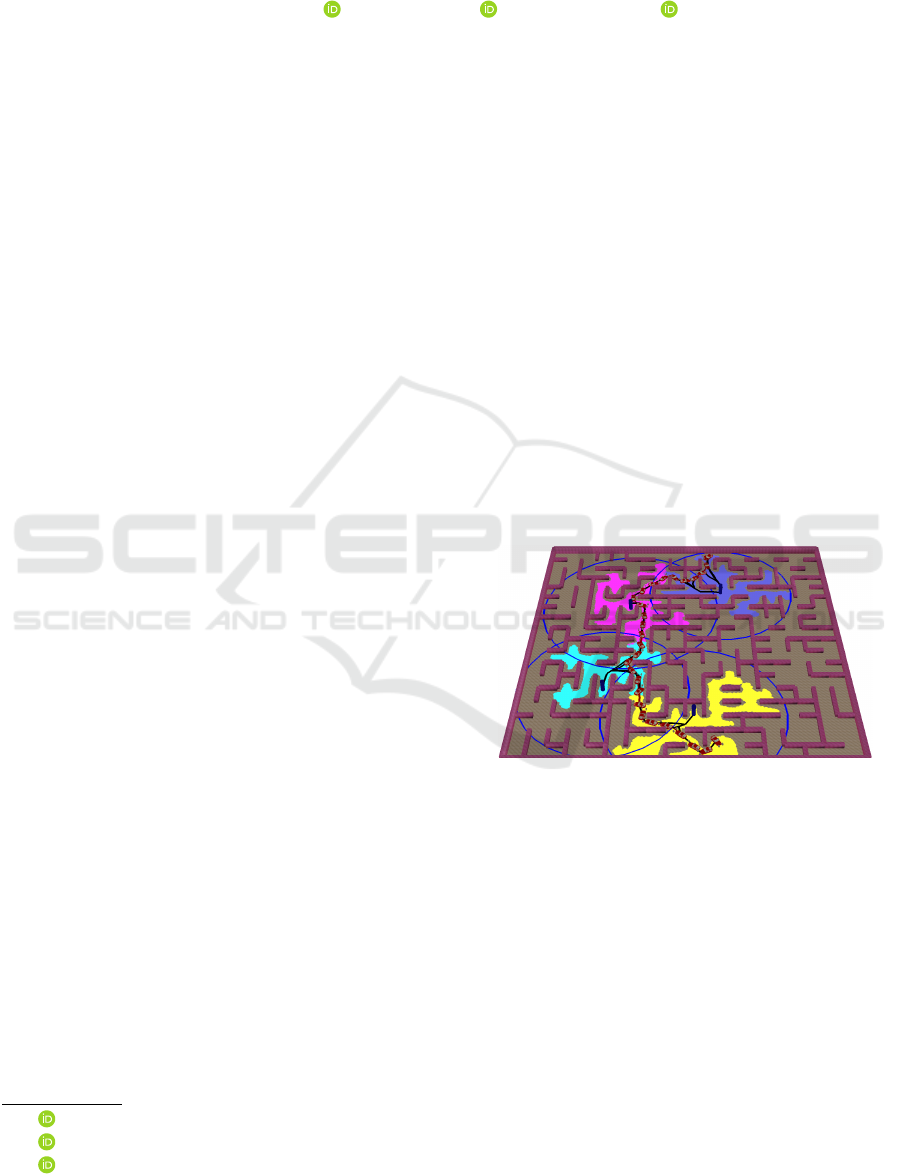
Figure 1: Example of path planning with safety zones for
a car robot model. Each safety zone is defined by its cen-
ter (blue cylinder) and radius (blue circle). For each inter-
mediate configuration along the main path to the goal, the
figure also shows the emergency route (black segments) to
reach a safety center within the distance constraints. If an
emergency path partially overlaps with the main path, only
the non-overlapping portion is visible. The safe locations
(from which a safety center can be reached within the dis-
tance constraints) are shown in yellow, cyan, magenta, and
blue for safety zones 1, 2, 3, and 4, respectively. Videos can
be found at https://tinyurl.com/y4d2urcf.
Toward this objective, this paper makes it possible
to incorporate safety zones into path planning. Each
safety zone consists of a center location and a corre-
sponding radius, representing the maximum permis-
sible distance the robot can travel to reach the cen-
ter. A location is deemed safe if the robot is able
Plaku, E., Çela, A. and Plaku, E.
Robot Path Planning with Safety Zones.
DOI: 10.5220/0012162100003543
In Proceedings of the 20th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2023) - Volume 1, pages 405-412
ISBN: 978-989-758-670-5; ISSN: 2184-2809
Copyright © 2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
405

to reach a safety center while avoiding collisions and
without traveling more than the radius associated with
the safety center. The objective is then to compute a
collision-free path that enables the robot to reach its
goal while remaining within safe locations. In this
way, the robot can always detour to a safety center
in response to emergency situations. Fig. 1 shows an
example of path planning with safety zones.
Path planning with safety zones presents signif-
icant challenges. Even without considering safety
zones, planning a collision-free path is challenging,
particularly in unstructured and obstacle-rich envi-
ronments. The robot must navigate around several
obstacles and maneuver through narrow passages to
reach its goal. When safety zones must be taken into
account, the complexity increases further. The path
planner must now reason about location safety and
generate safety paths from each intermediate location
along the main path. Consequently, this gives rise to
numerous path-planning problems, demanding novel
methods to ensure efficient and safe robot navigation.
To overcome these challenges, our approach
combines sampling-based exploration with discrete
search, enabling safe navigation in unstructured and
obstacle-rich environments. Our approach facili-
tates navigation by constructing a dense roadmap that
connects neighboring locations through collision-free
paths. Safe locations are identified by searching over
the roadmap from each safety center. Finally, the
path to the goal is computed through a shortest-path
search restricted to the safe portion of the roadmap.
If no such path exists, we add more samples and cre-
ate new connections to improve the roadmap cover-
age. This process of enhancing the roadmap, iden-
tifying safe locations, and searching the safe portion
continues until a solution is found or a runtime limit is
reached. We demonstrate the efficacy of our approach
by conducting simulated experiments in unstructured
2D and 3D environments with numerous obstacles,
employing both car and blimp robot models.
2 RELATED WORK
Sampling-based approaches have proven effective for
path planning in complex environments. One pop-
ular approach is the Probabilistic RoadMap (PRM)
(Kavraki et al., 1996), which constructs a roadmap by
sampling and connecting neighboring robot configu-
rations to capture the connectivity of the environment.
Various techniques seek to improve sampling near ob-
stacles (Cao et al., 2019), deferring collision checking
(Bohlin and Kavraki, 2000), utilizing machine learn-
ing (Baldoni et al., 2022), or provide asymptotically
optimal solutions (Karaman and Frazzoli, 2011).
Other approaches utilize Rapidly-exploring Ran-
dom Tree (RRT) (LaValle and Kuffner, 2001). En-
hancements include multi-step connections (Kuffner
and LaValle, 2000), regions (Denny et al., 2020), ob-
stacle clearance (Plaku et al., 2017), direct-path su-
perfacets (Plaku et al., 2018), and machine learning
(Wang et al., 2020; Zhao et al., 2022; Bui et al., 2022).
Risk-aware methods aim to compute collision-
free paths that reduce a risk metric (Feyzabadi and
Carpin, 2014; Primatesta et al., 2019). Other methods
incorporate uncertainty reasoning to ensure the safe
execution of planned paths by the robot (Schouwe-
naars et al., 2004; Pepy and Lambert, 2006).
Our proposed approach leverages from PRM the
idea of constructing a roadmap to capture the connec-
tivity of the environment. The roadmap in our case is
denser to provide alternative connections between lo-
cations. Moreover, we introduce the concept of safety
zones and leverage the roadmap to identify safe loca-
tions. By searching the safe portion of the roadmap,
our approach finds collision-free paths to the goal, en-
suring detours to safe centers from any intermediate
configuration along the planned path. This adaptive
capability is essential to reducing potential risks.
3 PROBLEM FORMULATION
This section defines the environment, safety zones,
robot models, and the overall problem.
The environment, denoted as W , consists of
obstacles O = {O
1
,...,O
m
} and safety zones S =
{S
1
,...,S
n
}. Obstacles are often represented as 2D
polygons or 3D triangular meshes. Each S
i
∈ S is de-
fined by its center and radius, denoted as S
i
.c and S
i
.r.
The robot model is a tuple R =
⟨
P , C
⟩
, where P
denotes its geometric shape and C denotes the config-
uration space. A configuration c =
⟨
p,θ
⟩
∈ C defines
the position p and orientation θ. The robot models
used in the experiments are shown in Fig. 2. For the
car model, c =
⟨
p = (x,y),θ
⟩
, where θ denotes the ro-
tation in the xy-plane. The blimp can fly parallel to
the xy-plane, so c =
⟨
p = (x,y,z),θ
⟩
.
A local motion from configuration c
1
∈ C to
c
2
∈ C is denoted as c
1
⇝ c
2
and is defined via in-
terpolation, i.e., interp : C × C × [0,1] → C, where
interp(c
1
,c
2
,t) = (1 − t)c
1
+tc
2
.
A path is defined as a sequence of configurations
σ : {1,...,ℓ} → C, where the robot follows the in-
terpolated motion from σ
i
to σ
i+1
. The notation |σ|
denotes the number of configurations, i.e., |σ| = ℓ.
The path length is defined as the distance traveled,
i.e., dist(σ) =
∑
|σ|−1
i=1
dist(σ
i
,σ
i+1
).
ICINCO 2023 - 20th International Conference on Informatics in Control, Automation and Robotics
406
Figure 2: The robot models used in the experiments.
It is often desirable to ensure that the intermediate
configurations in σ are no more than a distance d ∈
R
>0
from each other, i.e., dist(σ, σ
i+1
) ≤ d.
A configuration c ∈ C is collision-free if the robot
does not collide with an obstacle when placed accord-
ing to c. PQP (Larsen et al., 2000) is used to check for
collisions. A path is collision-free if every configura-
tion in the sequence and the interpolated motions be-
tween intermediate configurations are collision-free.
A configuration c ∈ C is safe if there is a collision-
free path λ from c to a safety center S
i
.c such that
dist(λ) ≤ S
i
.r. Note that some locations within the
ball defined by S
i
.c and S
i
.r could be unsafe since, due
to obstacles, there may not be a collision-free path to
a safety center that satisfies the distance constraints.
Putting it all together, the input to path planning
with safety zones is the environment W , obstacles
O = {O
1
,...,O
m
}, safety zones S = {S
1
,...,S
n
}, the
robot model R =
⟨
P , C
⟩
, a maximum distance d be-
tween configurations, and the initial and goal config-
urations c
init
,c
goal
∈ C. The objective is to compute a
collision-free path σ from c
init
to c
goal
consisting en-
tirely of safe configurations. In addition, the approach
should compute a safety path λ
i
for each intermedi-
ate configuration c
i
∈ σ. Intermediate configurations
along σ and each λ
i
should be within a maximum dis-
tance d from each other. Figs. 1 and 3 provide several
illustrations of path planning with safety zones.
4 METHOD
Our approach has three components. The first com-
ponent constructs a roadmap to facilitate navigation
within the safe zones. The second component identi-
fies the safe roadmap nodes, i.e., nodes that can reach
a safety center with a path whose length does not ex-
ceed the radius of the safety zone. The third compo-
nent searches over the safe portion of the roadmap to
find a path from the initial to the goal configuration.
Pseudocode is shown in Alg. 1. Details follow.
4.1 Roadmap Construction Within
Safety Zones
The roadmap is represented as a graph G = (V ,E).
Each node v ∈ G.V corresponds to a collision-free
configuration, denoted as v.c. Each edge
⟨
v, u
⟩
∈ G.E
Algorithm 1: Path planning with safety zones.
Input: W : environment; O: obstacles;
S = {S
1
,.. .,S
n
}: safety zones; R =
⟨
P ,C
⟩
: robot
model; d: maximum roadmap edge distance; k:
number of roadmap neighbors; nrSamplesToAdd:
roadmap batch size; c
init
,c
goal
∈ C : initial and goal
configurations; t
max
: runtime limit.
Output: A collision-free path σ from c
init
to c
goal
consisting entirely of safe configurations, and a
collision-free safety path λ
i
for each c
i
∈ σ.
1 G = (V , E) ← (
/
0,
/
0);
2 for c ∈ {c
init
,c
goal
,S
1
.c,...,S
n
.c} do
3 v.
⟨
c,safe,d
1
,...,d
n
⟩
←
ADDNODE(
⟨
c,false,∞, . . . ,∞
⟩
);
4 while TIME() ≤ t
max
do
5 nrNodes ← |G.V |;
6 for i = 1, . ..,nrSamplesToAdd do
7 c ← SAMPLEVALIDCFG(W ,O, S);
8 v.
⟨
c,safe,d
1
,...,d
n
⟩
←
ADDNODE(G,
⟨
c,false,∞, . . . ,∞
⟩
);
9 for i = nrNodes, . ..,|G.V | − 1 do
10 v ← GETNODE(G, i);
11 for u ∈ NEIGHBORS(G,v.c,k) do
12 if ¬COLLISION(W , O,v.c ⇝ u.c)
then ADDEDGE(G,
⟨
v,u
⟩
,d);
13 for S
i
∈ S do
14 S
i
.parents ← FINDSAFE(G, S
i
.c,S
i
.r);
15 for
⟨
v,parent,cost
⟩
∈ S
i
.parents do
16 v.safe ← true; v.d
i
← cost;
17 V
safe
← {v : v ∈ G.V ∧ v.safe = true};
18 E
safe
← G.E ∩ (V
safe
× V
safe
);
19 G
safe
←
V
safe
,E
safe
;
20 if CONNECTED(G
safe
,v
init
,v
goal
) then
21 σ ← SHORTESTPATH(G
safe
,v
init
,v
goal
);
22 for i = 1, . ..,|σ| do
23 λ
i
← RETRIEVESAFEPATH(S, σ
i
);
24 return
σ,λ
1
,...,λ
|σ|
;
25 return
/
0;
indicates a collision-free path from v.c to u.c, which
is obtained by interpolation and denoted by v.c ⇝ u.c.
Moreover, each node v maintains information about
the shortest-path distances to each safety center, rep-
resented as v.d
1
,...,v.d
n
. The node v is marked as
safe (indicated by a Boolean flag v.safe) if one of these
shortest paths reaches its safety center within the dis-
tance constraints, i.e., v.d
i
≤ S
i
.r. In this way, the
roadmap corresponds to a network of collision-free
configurations interconnected via collision-free paths,
designed to facilitate efficient and safe navigation.
The roadmap construction starts by adding the ini-
tial and goal configurations, along with the center of
each safety zone, as roadmap nodes (Alg. 1:1–3). The
Robot Path Planning with Safety Zones
407

roadmap is further populated by adding randomly-
generated collision-free configurations (Alg. 1:6–8).
SAMPLEVALIDCFG repeatedly samples a configuration
until it is not in collision. The sampling is exclusively
conducted within the safety zones, as configurations
outside these zones are inherently unsafe.
The next stage seeks to connect each node v to its
k-nearest configurations through collision-free paths
(Alg. 1:9–12). As mentioned earlier, the path from
v to a neighbor u is obtained through interpolation
from v.c to u.c. If any intermediate configuration is
in collision, the edge (v,u) is discarded. To stream-
line this process, we create a mesh that encompasses
all the robot placements along the intermediate con-
figurations. Subsequently, we employ efficient colli-
sion checking, e.g., PQP, to assess whether the mesh
is in collision. This allows us to efficiently determine
the collision-free nature of the entire path, without the
need for individual configuration checks.
If the path from v.c to u.c is collision-free, we con-
nect v and u in the roadmap (Alg. 1:12). However,
if this edge is long, the function ADDEDGE divides it
into smaller segments, each no longer than a specified
distance d. These segments are then added as individ-
ual edges to the roadmap. This approach ensures that
the roadmap captures the connectivity between nodes
accurately, even for longer edges.
4.2 Identifying Safe Roadmap Nodes
After constructing the roadmap, the next task is to de-
termine which roadmap nodes are safe. To qualify as
safe, a node v must have a roadmap path λ that reaches
the center of a safety zone S
i
such that dist(λ) ≤ S
i
.r.
One possible approach to identify the safe nodes is
to perform a shortest-path search from each node in
the roadmap. However, this can be computationally
expensive, especially when the roadmap is dense.
To address this, we utilize Dijkstra’s shortest-path
algorithm (Dijkstra, 1959) and initiate the search from
each safety center (Alg. 1:13–16). The search starting
from S
i
.c ends when a node is removed from the pri-
ority queue with a path length exceeding S
i
.r. This is
possible because all the remaining nodes in the queue
will have a path length greater than S
i
.r, and thus, they
can be excluded from further consideration. By em-
ploying this optimization, we can efficiently identify
the safe nodes without the need to run shortest-path
searches from every roadmap node.
Upon completion of the search, we are able to
identify all the nodes that are accessible from S
i
.c
through paths with a length that does not surpass S
i
.r.
For each of these nodes, we maintain records of both
the index of the corresponding safety center and the
path length required to reach that safety center. This
information allows us to keep track of the connection
between the nodes and their associated safety centers,
as well as the corresponding path distances. In addi-
tion, each S
i
maintains the parent map generated by
Dijkstra’s algorithm. The entries in the parent map
are tuples
⟨
v, parent, cost
⟩
, where v serves as the in-
dex key, parent denotes the parent node of v, and cost
represents the path length from S
i
.c to v. This data
structure enables efficient retrieval and reconstruction
of the paths from the safe nodes to S
i
.c.
4.3 Searching over the Safe Portion of
the Roadmap
When considering safety zones, the planned path
must only traverse safe nodes. To achieve this, we
eliminate all nodes (and their edges) that are not
marked as safe. This refined subset of the roadmap,
consisting exclusively of safe nodes and edges, is re-
ferred to as the “safe portion” of the roadmap, and is
denoted as G
safe
=
V
safe
,E
safe
(Alg. 1:17–19).
To determine the shortest path, we employ A*
(Hart et al., 1968) on G
safe
(Alg. 1:20–21). To save
computational time, we run A* only when we are cer-
tain that a path exists in G
safe
from c
init
to c
goal
. This
certainty is achieved by utilizing a disjoint-set data
structure (Galler and Fisher, 1964), which helps us
keep track of the connected components within G
safe
.
Let σ denote the path obtained from A*. In ad-
dition to σ, we also require the sub-paths from each
configuration in σ to a corresponding safety center
(Alg. 1:24–25). To reconstruct these sub-paths, we
utilize the parent maps generated by Dijkstra’s algo-
rithm, which are stored by each safety zone S
i
. In
cases where σ
i
is associated with multiple safety cen-
ters, we select the shortest path among them. This en-
sures that we obtain the most efficient path from each
configuration in σ to its corresponding safety center.
If it is determined that there is no path connect-
ing the initial and goal configurations within the G
safe
graph, it could be due to inadequate sampling or in-
sufficient connections within the roadmap. In such
cases, we return to the roadmap construction stage
and continue populating the roadmap with additional
nodes and establishing new connections.
Following the updated roadmap construction, we
once again identify the nodes that are considered
safe and perform a search exclusively within the safe
portion of the roadmap. This iterative process of
augmenting the roadmap, determining safe nodes,
and conducting searches over the safe portion of the
roadmap is repeated until a solution path is discovered
or a predefined runtime limit is reached.
ICINCO 2023 - 20th International Conference on Informatics in Control, Automation and Robotics
408

5 EXPERIMENTS AND RESULTS
Experiments are conducted in simulation using a car
and a blimp robot model operating in unstructured en-
vironments with numerous obstacles.
5.1 Tree-Based Path Planner for
Baseline Comparison
To the best of our knowledge, there is no existing ap-
proach that addresses the specific problem considered
in this paper. To establish a baseline, we developed
an alternative method comprised of a a main and an
auxiliary planner, both based on RRT. Before adding
a node to the main tree, the auxiliary planner is in-
voked to compute a safety path from the node to the
center of a safety zone, ensuring the path length stays
within the safety zone’s radius. The node is added to
the tree only if a valid safety path is found.
Pseudocode is shown in Alg. 2. In each iteration, a
target configuration is randomly sampled. Small steps
are then taken from the nearest tree node v
near
toward
the target along an interpolation path until the target
is reached or a collision is detected. If the goal is
reached, a solution is found. This process of sampling
a target and expanding a branch from the nearest node
toward the target is repeated until a solution is found
or a runtime limit is reached.
The auxiliary and main planners utilize dif-
ferent strategies for implementing SELECTTARGET,
ACCEPTABLE(v), and REACHEDGOAL(v). In the auxil-
iary planner, targets are sampled from the entire con-
figuration space, with occasional guidance toward a
random safety center. ACCEPTABLE(v) checks if it is
still possible to reach any safety center. If the dis-
tance from the root of the tree to v and from v to the
center of a safety zone S
i
exceeds S
i
’s radius, v cannot
reach the center of S
i
. If none of the centers are reach-
able, v is deemed unacceptable. REACHEDGOAL(v) is
satisfied when v reaches any of the safety centers.
In the main planner, targets are generally sam-
pled from the entire configuration space, but occa-
sionally the goal configuration c
goal
is selected as the
target. REACHEDGOAL(v) is considered satisfied when
v reaches c
goal
. ACCEPTABLE(v) utilizes the auxiliary
planner to check if there exists a path from v to a
safety center that satisfies the distance constraints.
5.2 Environments
The experiments are conducted using four scene
types: maze, random, waves, and 3D rooms, as shown
in Figs. 1 and 3. These scenes pose significant chal-
lenges, as the robot must avoid numerous obstacles
Algorithm 2: Tree-based path planning with safety zones
for baseline comparisons.
Input: W : environment; O: obstacles;
S = {S
1
,.. .,S
n
}: safety zones; R =
⟨
P ,C
⟩
:
robot; b: sampling bias; t
max
: runtime limit.
Output: A collision-free path σ from c
init
to c
goal
consisting entirely of safe configurations, and a
collision-free safety path λ
i
for each c
i
∈ σ.
1 T ← INITIALIZETREE(c
root
);
2 while TIME() < t
max
do
3 c
target
← SAMPLETARGET();
4 v ← v
near
← NEAREST(T ,c);
5 ℓ ← NRSTEPSPATH(v.c, c
target
);
6 for i = 1, . ..,ℓ do
7 v
new
← NEWNODE();
8 v
new
.c ← interp(v
near
.c,c
target
,i/ℓ);
9 v
new
.parent ← v;
10 v
new
.d ← v.d + dist(v.c,c);
11 if ¬COLLISION(v) then break;
12 if ¬ACCEPTABLE(v) then break;
13 ADDNODE(T ,v
new
);
14 if REACHEDGOAL(v
new
) then
15 return SOLUTION(T , v
new
);
16 v ← v
new
;
17 return
/
0;
Auxiliary Planner
SAMPLETARGET()
if RAND() < b then
return select one of the S
i
.c at random;
else return random cfg from entire space;
ACCEPTABLE(v)
return ∃S
i
∈ S : v.d + dist(v.c, S
i
.c) ≤ S
i
.r;
REACHEDGOAL(v)
return ∃S
i
∈ S : dist(v.c,S
i
.c) ≤ ε;
Main Planner
SAMPLETARGET()
if RAND() < b then return c
goal
;
else return random cfg from entire space;
ACCEPTABLE(v): return auxPlanner.PLAN(v) ̸=
/
0
REACHEDGOAL(v): return dist(v.c, c
goal
) ≤ ε
and navigate narrow passages to reach its destination.
For the maze, random, and waves scenes, we cre-
ated three difficulty levels, with L3 being the most
challenging. Maze levels L1, L2, and L3 corre-
spond to maze dimensions of 10 × 10, 14 × 14, and
18 × 18, respectively. During maze generation, we
used Kruskal’s algorithm to set the grid dimensions
and randomly place walls. However, to introduce al-
ternative paths in the maze, approximately 10% of
the walls were removed. This modification allows
for multiple navigation options, but the maze remains
Robot Path Planning with Safety Zones
409
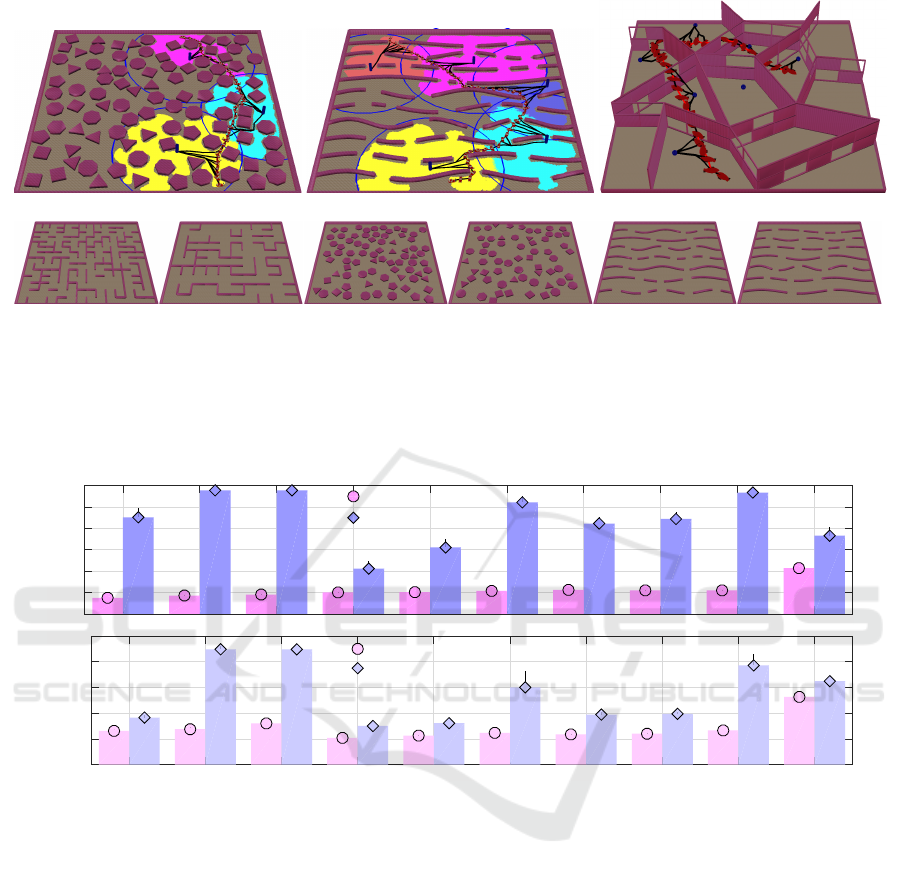
random:L3 waves:L3 rooms:3D
maze:L2 maze:L1 random:L2 random:L1 waves:L2 waves:L1
Figure 3: The other scene types (random, waves, rooms) used in the experiments. The maze scene type is shown in Fig. 1.
For the maze, random, and waves scene types, we have three levels of difficulty with L3 being the most challenging. In the
random and waves scene types at the L3 difficulty level, the figures also illustrate safety zones, along with the safe locations
and solutions determined by our approach. Due to the visual complexity of presenting safety zones and safe locations in the
3D rooms scene, we opted to showcase solely the centers of the safety zones and the solution computed by our approach. The
car model is used in the maze, random, and waves scene types, while the blimp model is used in the 3D rooms scene.
mazes:L1
1.7
23.0
mazes:L2
1.8
X
mazes:L3
1.9
X
random:L1
2.0
4.3
random:L2
2.0
8.6
random:L3
2.1
37.3
waves:L1
2.2
18.8
waves:L2
2.1
21.8
waves:L3
2.1
51.3
rooms:3D
4.4
12.7
1
2
4
8
16
32
64
our planner
baseline planner
runtime [s]
mazes:L1
20
28
mazes:L2
21
X
mazes:L3
24
X
random:L1
16
23
random:L2
17
24
random:L3
19
64
waves:L1
18
31
waves:L2
18
31
waves:L3
20
116
rooms:3D
50
76
8
16
32
64
128
256
our planner
baseline planner
distance [m]
Figure 4: Runtime and solution length results on a logarithmic scale. These results correspond to problem instances where the
radii of safety zones are randomly set within the interval I
2
= [4m,6m]. Entries marked with X indicate failure by the baseline
planner to solve the problem instances within the 60s time limit per run.
challenging due to its density and zigzag paths.
The random scenes consist of randomly placed
obstacles, with varying difficulty levels determined by
the percentage of area covered by these obstacles. L1,
L2, and L3 correspond to 20%, 25%, and 30% cover-
age, respectively. These levels create dense environ-
ments with limited passages for the robot.
The waves scene type consists of wavy obstacles
spaced slightly apart from each other. Each wave
contains randomly positioned gaps of varying width.
However, these gaps are relatively narrow, requiring
the robot to maneuver with precision. Different diffi-
culty levels are achieved by adjusting the number of
wave obstacles. L1, L2, and L3 levels contain 5, 7,
and 10 wave obstacles, respectively.
The 3D rooms scene comprises multiple rooms,
each containing small openings positioned at various
heights that the blimp robot can traverse. This creates
a challenging environment, as the blimp robot must
navigate with precision, flying from one room to an-
other in order to reach its destination.
5.3 Problem Instances
For the maze, random, and waves scene types, we cre-
ated 3 scenes for each level of difficulty for a total of
27 scenes. We have one scene for the 3D rooms, so
28 different scenes were used in the experiments.
A problem instance is defined by placing the ini-
tial and goal configurations and the safety zones. The
initial and goal configurations are placed at collision-
free locations near the bottom and top, respectively,
ICINCO 2023 - 20th International Conference on Informatics in Control, Automation and Robotics
410
I
1
2.9
X
I
2
1.9
X
I
3
2.0
X
I
4
2.6
X
I
5
2.0
X
I
1
2.1
24.6
I
2
2.1
37.3
I
3
2.2
20.3
I
4
2.2
17.3
I
5
2.2
27.8
I
1
1.9
51.4
I
2
2.1
51.3
I
3
1.9
40.6
I
4
2.2
38.5
I
5
2.2
31.8
I
1
4.5
7.0
I
2
4.4
12.7
I
3
5.5
12.4
I
4
4.6
18.9
I
5
5.6
18.2
mazes:L3 random:L3 waves:L3 rooms:3D
1
2
4
8
16
32
64
our planner
baseline planner
runtime [s]
I
1
26
X
I
2
24
X
I
3
21
X
I
4
23
X
I
5
22
X
I
1
18
25
I
2
19
64
I
3
19
26
I
4
18
27
I
5
18
36
I
1
22
120
I
2
20
116
I
3
20
71
I
4
19
67
I
5
20
61
I
1
41
58
I
2
50
76
I
3
42
57
I
4
43
67
I
5
42
69
mazes:L3 random:L3 waves:L3 rooms:3D
8
16
32
64
128
256
our planner
baseline planner
distance [m]
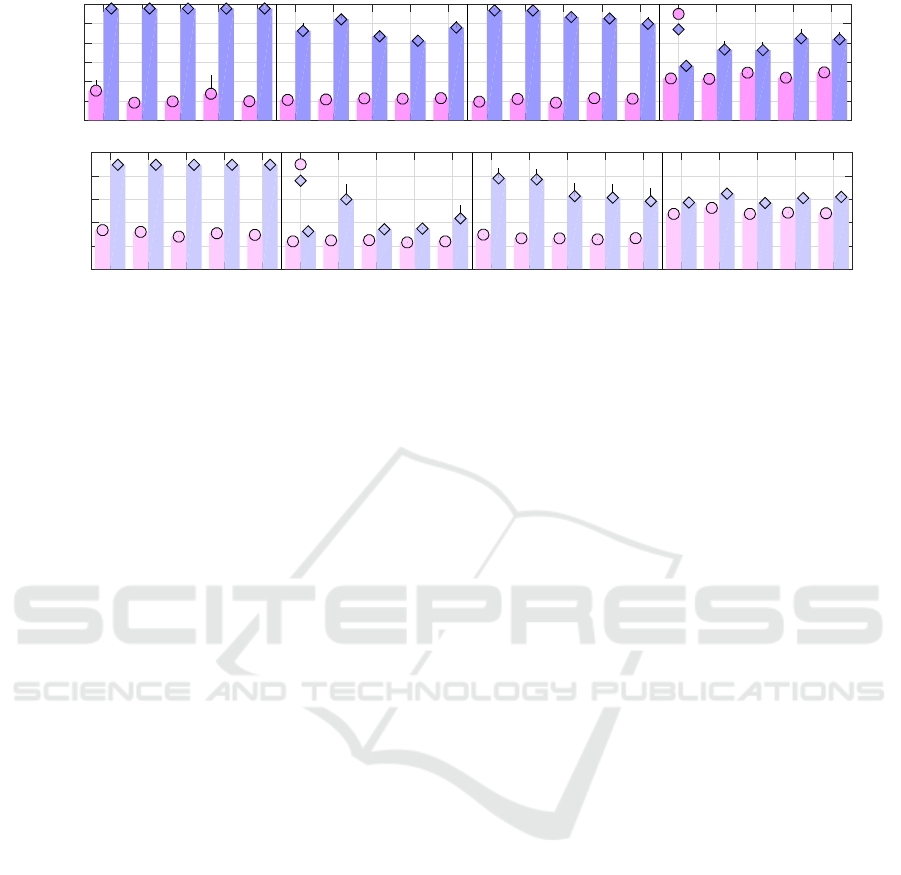
Figure 5: Runtime and solution length results when varying the intervals used to set the radii of the safety zones, where
I
1
= [2m, 4m], I
2
= [4m, 6m], I
3
= [6m, 8m], I
4
= [8m, 10m], and I
5
= [10m, 12m].
requiring the robot to navigate a considerable dis-
tance. The safety zones are created by randomly po-
sitioning their centers and setting their radii at ran-
dom within specified minimum and maximum val-
ues. These safety zones cover both the initial and goal
configurations and form a connected component, with
overlaps between zones considered as connections.
For the experiments, we generated problem in-
stances with safety zone radii falling into five inter-
vals: I
1
= [2m,4m], I
2
= [4m,6m], I
3
= [6m,8m],
I
4
= [8m,10m], and I
5
= [10m,12m]. For each scene
and interval I
j
, we created 30 instances following the
procedure described above. As a result, we generated
a total of 28 × 5 × 30 = 4200 problem instances.
5.4 Measuring Performance
The experiments were conducted on a computing
cluster comprising nodes with Dell PowerEdge R640
Intel(R) Xeon(R) Gold 6240R CPU 2.40GHz, each
equipped with 48 cores. The experiments did not uti-
lize parallelism or multi-threading; instead, each in-
stance was executed on a single core. The code was
implemented in C++ and compiled using g++-9.3.0.
The results provide information on the runtime
and solution length for our approach and the baseline
planner. The runtime includes the time taken from
reading the input until a solution is found or until the
runtime limit of 60s per run is reached. To obtain
more reliable statistics, the mean and standard devia-
tion are calculated after removing the top and bottom
25% of the results to mitigate the influence of outliers.
5.5 Results
Results over All Scene Types: Fig. 4 presents
the runtime and solution length results for all the
scene types utilized in the experiments. The findings
demonstrate the computational efficiency of our ap-
proach, as it is able to rapidly discover solutions even
in highly challenging environments. This efficiency
stems from a combination of roadmap construction,
identification of safe locations, and search over the
safe portion of the roadmap. The roadmap captures
the connectivity of the environment, facilitating ef-
ficient navigation within and between safety zones.
The search-based approaches quickly identify the safe
nodes within the roadmap and find a collision-free
path to the goal, ensuring that each intermediate con-
figuration along the path can reach a safety center
within the distance constraints.
The baseline planner is capable of solving some of
the problem types, but requires significant time, and
even fails, in the more challenging problems where
the robot has to navigate around numerous obstacles
and pass through several narrow passages to reach its
goal. This outcome is anticipated due to the nature of
the baseline planner, which requires invoking the aux-
iliary planner multiple times to determine paths to-
wards safety centers for each node added to the main
tree. Consequently, this process incurs a significant
computational cost, making it less efficient and effec-
tive in complex problem instances.
When comparing solution lengths, our approach
consistently produces significantly shorter solutions
than the baseline planner. This is due to the shortest-
path searches over the roadmap, enabling our ap-
proach to reduce the distance required to reach the
safety centers and the goal.
Results When Varying the Area of Safety Zones:
Fig. 5 shows the runtime and solution length results
obtained by varying the radii of the safety zones
across different intervals. These results further high-
light the computational efficiency of our approach
and its ability to generate short solutions. Our ap-
proach consistently performs well across all problem
Robot Path Planning with Safety Zones
411

instances, benefiting from the roadmap construction
that facilitates navigation within and between safety
zones, even when their areas change. The shortest-
path searches conducted over the roadmap enable our
approach to identify safe locations and determine a
safe path to the goal. In contrast, the baseline planner
faces challenges in expanding the tree effectively to
satisfy the distance constraints imposed by the safety
zones. This further highlights the advantage of our
approach in handling varying safety zone radii.
6 DISCUSSION
This paper presented a novel approach to incorporate
safety zones into path planning. The approach made
it possible to plan the path of a robot to reach its goal
while always being able to detour to a safety cen-
ter within the specified distance constraints in case of
emergencies. Experiments in challenging 2D and 3D
environments, involving car and blimp robot models,
demonstrated the efficacy of the approach.
This work opens up several potential research di-
rections. One direction is leveraging machine learn-
ing to predict safe locations. Another is to handle
complex tasks, including multiple goals, exploration,
and even extend the approach to multiple robots.
REFERENCES
Baldoni, P., McMahon, J., and Plaku, E. (2022). Leveraging
neural networks to guide path planning: Improving
dataset generation and planning efficiency. In IEEE
International Conference on Automation Science and
Engineering, pages 667–674.
Bohlin, R. and Kavraki, L. E. (2000). Path planning us-
ing lazy PRM. In IEEE International Conference on
Robotics and Automation, volume 1, pages 521–528.
Bui, H.-D., Lu, Y., and Plaku, E. (2022). Improving the
efficiency of sampling-based motion planners via run-
time predictions for motion-planning problems with
dynamics. In IEEE/RSJ International Conference on
Intelligent Robots and Systems, pages 4486–4491.
Cao, K., Cheng, Q., Gao, S., Chen, Y., and Chen, C. (2019).
Improved PRM for path planning in narrow passages.
In IEEE International Conference on Mechatronics
and Automation, pages 45–50.
Choset, H., Lynch, K. M., Hutchinson, S., Kantor, G., Bur-
gard, W., Kavraki, L. E., and Thrun, S. (2005). Prin-
ciples of Robot Motion: Theory, Algorithms, and Im-
plementations. MIT Press.
Denny, J., Sandstr
¨
om, R., Bregger, A., and Amato, N. M.
(2020). Dynamic region-biased rapidly-exploring ran-
dom trees. In Workshop on the Algorithmic Founda-
tions of Robotics, pages 640–655.
Dijkstra, E. W. (1959). A note on two problems in connex-
ion with graphs. Numerische Mathematik, 1:269–271.
Feyzabadi, S. and Carpin, S. (2014). Risk-aware path plan-
ning using hirerachical constrained markov decision
processes. In IEEE International Conference on Au-
tomation Science and Engineering, pages 297–303.
Galler, B. A. and Fisher, M. J. (1964). An improved
equivalence algorithm. Communications of the ACM,
7(5):301–303.
Hart, P. E., Nilsson, N. J., and Raphael, B. (1968). A for-
mal basis for the heuristic determination of minimum
cost paths. IEEE Transactions on Systems Science and
Cybernetics, 4(2):100–107.
Karaman, S. and Frazzoli, E. (2011). Sampling-based algo-
rithms for optimal motion planning. The International
Journal of Robotics Research, 30(7):846–894.
Kavraki, L. E.,
ˇ
Svestka, P., Latombe, J. C., and Overmars,
M. H. (1996). Probabilistic roadmaps for path plan-
ning in high-dimensional configuration spaces. IEEE
Transactions on Robotics and Automation, 12(4):566–
580.
Kuffner, J. J. and LaValle, S. M. (2000). RRT-connect: An
efficient approach to single-query path planning. In
IEEE International Conference on Robotics and Au-
tomation, volume 2, pages 995–1001.
Larsen, E., Gottschalk, S., Lin, M., and Manocha, D.
(2000). Fast proximity queries with swept sphere vol-
umes. In IEEE International Conference on Robotics
and Automation, pages 3719–3726.
LaValle, S. M. and Kuffner, J. J. (2001). Randomized kino-
dynamic planning. International Journal of Robotics
Research, 20(5):378–400.
Pepy, R. and Lambert, A. (2006). Safe path plan-
ning in an uncertain-configuration space using RRT.
In IEEE/RSJ International Conference on Intelligent
Robots and Systems, pages 5376–5381.
Plaku, E., Plaku, E., and Simari, P. (2017). Direct path
superfacets: An intermediate representation for mo-
tion planning. IEEE Robotics and Automation Letters,
2(1):350–357.
Plaku, E., Plaku, E., and Simari, P. (2018). Clearance-
driven motion planning for mobile robots with differ-
ential constraints. Robotica, 36(7):971–993.
Primatesta, S., Guglieri, G., and Rizzo, A. (2019). A risk-
aware path planning strategy for UAVs in urban envi-
ronments. Journal of Intelligent & Robotic Systems,
95:629–643.
Schouwenaars, T., How, J., and Feron, E. (2004). Reced-
ing horizon path planning with implicit safety guar-
antees. In American Control Conference, volume 6,
pages 5576–5581.
Wang, J., Chi, W., Li, C., Wang, C., and Meng, M. Q.-H.
(2020). Neural RRT*: Learning-based optimal path
planning. IEEE Transactions on Automation Science
and Engineering, 17(4):1748–1758.
Zhao, C., Zhu, Y., Du, Y., Liao, F., and Chan, C.-Y. (2022).
A novel direct trajectory planning approach based on
generative adversarial networks and rapidly-exploring
random tree. IEEE Transactions on Intelligent Trans-
portation Systems, 23(10):17910–17921.
ICINCO 2023 - 20th International Conference on Informatics in Control, Automation and Robotics
412
