
VICE: View-Invariant Chess Estimation
Kevin Zhu
a
, Alexander Wong and John McPhee
b
University of Waterloo, Canada
Keywords:
Chess, Automated Digitization, Computer Vision, Deep Learning.
Abstract:
A digitized chess match offers chess players a convenient way to study previous matches. However, manually
recording a large number of matches can be laborious, while automated methods are usually hardware-based,
requiring expensive chessboards. Computer vision provides a more accessible way to track matches from
videos. However, current vision-based digitizers are often evaluated on images captured by cameras placed
directly above a chessboard, and performance suffers when the camera angle is lower, limiting their applica-
bility. Motivated to develop a more practical solution, we introduce VICE, a view-invariant chess estimator to
digitize matches from camera angles not seen during training. Due to its small model size and computational
efficiency, VICE is suitable for mobile deployment. By rearranging the framework for chess detection and
incorporating prior information from chess and basic geometry, we simplify the chess estimation problem and
mitigate the challenges that current chess digitizers struggle with, such as occlusion. We combine the board
localization and chess piece detection phases of classical two-step chess estimation to develop a prototype for
the first single-step chess digitizer. We show that, with minimal training data, our prototype can infer moves
from camera angles that current chess digitizers cannot, while being much smaller in size.
1 INTRODUCTION
The current popularity growth in chess may rival the
boom in 1972 (Keener, 2022), when the World Chess
Championship match took place between American
Bobby Fischer and Soviet Boris Spassky, at the height
of the Cold War. Although the COVID-19 pandemic
contributed to the current surge, with active users
on Chess.com more than doubling from 8 million
to 17 million from 2020 to 2022, it does not mean
that people have permanently switched to compet-
ing online. In 2020, after the reopening of the Mar-
shall Chess Club, one of the oldest chess clubs in the
United States, the number of active members reached
a record-high in the club’s 107-year history.
Just like in any other sport, post-game analysis
is important for a player’s growth and development.
A digitized chess match (Fig. 1) offers a convenient
way to study both ongoing and previous matches. It
is visual, compact, and can be uploaded to chess en-
gines for analysis. However, manually recording in-
person matches can be a tedious process. Current au-
tomated tracking methods are usually hardware-based
(SquareOff, 2018; DGT, 1998) and require expensive
a
https://orcid.org/0000-0003-1585-6170
b
https://orcid.org/0000-0003-3908-9519
boards, which could be inaccessible for many.
Figure 1: Digitized game state (right image) after move Nf6
of Ding vs. Aronian in the 2019 Tata Steel Blitz (ChessBa-
seIndia, 2020a). Ding (left player) starts his move immedi-
ately after Nf6, while Aronian’s arm is still in frame, fully
occluding some chess pieces around the A8 corner. At the
current game state, there are no frames where human hands
don’t occlude part of the board.
Recent computer vision methods, such as
LiveChess2FEN (Mallas
´
en Quintana et al., 2021) and
Chesscog (W
¨
olflein and Arandjelovi
´
c, 2021), have
shown promising results on predicting a chess game
state from an image. However, these methods are of-
ten evaluated on images taken from a bird’s eye view
(BEV), and performance suffers when the camera an-
gle is lower. This limits the practicability of these
methods in real-world scenarios. A scan on YouTube
will show that most broadcast videos of chess are
taken at a lower camera angle. At an amateur tour-
nament or when partaking in a street chess match, it
50
Zhu, K., Wong, A. and McPhee, J.
VICE: View-Invariant Chess Estimation.
DOI: 10.5220/0012167200003587
In Proceedings of the 11th International Conference on Sport Sciences Research and Technology Support (icSPORTS 2023), pages 50-60
ISBN: 978-989-758-673-6; ISSN: 2184-3201
Copyright © 2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)

Figure 2: (a): An image corresponding to move c4. (b): Zooming in to the top right corner of (a), occlusion among chess
pieces, occlusion from Aronian’s arm and shadows make chess piece classification challenging. (c): The pixels within each
square may not provide sufficient information to classify chess pieces since some chess sets have the same base for different
chess pieces.
is also unlikely to have a personal phone or camera
placed directly above the chessboard.
These vision-based methods first localize the
chessboard using a combination of deep learning and
traditional computer vision methods such as edge and
corner detectors (Lu et al., 2015; Harris and Stephens,
1988), then classify the chess piece in each square of
the chessboard using convolutional neural networks
(CNNs). The board localization step implements
many rule-based modules with hand-picked parame-
ters to compute the geometry of the board from the
detected edges and corners in the image. If prob-
lems occur during edge and corner estimation, errors
could arise during the geometry calculations, termi-
nating the entire process. This could happen when a
human hand partially obstructs the board (Fig. 2a), a
case that previous methods did not consider. The ac-
curacy in the classification step suffers mainly due to
occlusion among pieces (Fig. 2b). Even when occlu-
sion is not the case, the pixels in each square some-
times don’t provide enough information — at a low
camera angle, only the base of the chess piece is visi-
ble in each square, and some chess sets have the same
base for all pieces (Fig. 2c).
Motivated to develop a more robust method, we
propose a view-invariant chess estimator (VICE) that
is able to predict chess moves from unseen camera an-
gles in a single step. We refer to camera angles and
matches that do not appear in the training dataset as
“unseen” camera angles and matches. The approach
of current chess digitization methods is very similar to
two-stage object detectors — a network generates re-
gion proposals in an image, then another network pre-
dicts the class of the objects in the proposed regions.
By using an object detector, VICE directly infers the
position of each chess piece in an image. To map the
detected pieces onto a chessboard, we model the cor-
ners of the chessboard as objects, for the object de-
tector to detect simultaneously with the chess pieces,
similar to the approach for dart scoring in (McNally
et al., 2021). We use the detected corners of the board
to estimate a homography matrix to project the image
locations of each chess piece onto chessboard coor-
dinates. This combines board localization and piece
detection into one step, and avoids the need for ge-
ometry computations of the chessboard and granular
location estimation of each square.
Due to chess’s strict transition rules, we are able
to infer the next state of the game given the previous
state and current chess move. Since the initial state
of a chess match is always fixed, we are able to track
an entire match by tracking each move. Leveraging
this information, VICE only detects the previous and
new locations of chess pieces that moved. This omits
the need for chess piece classification. Although this
means later predictions depend on the current predic-
tion, it is often easy to detect when an error is made —
the current predicted move or a later predicted move
will become illegal. Once the error is found and cor-
rected manually, the subsequent moves will be up-
dated automatically. Furthermore, as in Fig. 1, it is
common in speed chess for a player to start a move
before their opponent releases a chess piece. This
can lead to game states where a hand fully occludes
certain chess pieces in every frame. In these cases,
without prior information, it is impossible to accu-
rately infer the game state from a single image. In
the case that the user does not want to track a match
from the beginning, they can manually enter an ini-
tial state. Almost all chess digitizing methods include
human interaction components (W
¨
olflein and Arand-
jelovi
´
c, 2021; Mallas
´
en Quintana et al., 2021; Danner
and Kafafy, 2015; Khan and Kesavan, 2014; Sokic
and Ahic-Djokic, 2008; Gonc¸alves et al., 2005).
In summary, we introduce VICE as a prototype
for a view-invariant chess estimator. By modeling the
chess pieces that move as objects, VICE mitigates the
effects of occlusion among chess pieces and from the
human hand, situations that current methods struggle
with. By modeling the corners of the chessboard as
objects and detecting them simultaneously with the
chess pieces, VICE is able to combine the chessboard
VICE: View-Invariant Chess Estimation
51

Figure 3: VICE samples frame pairs before and after a chess move and detects change objects (red) and corner objects
(blue) from the image difference. Change detections are then projected onto chessboard coordinates by a homography matrix
estimated by the corner detections. Detections from each sample pair are aggregated and combined with the previous game
state to predict the current chess move.
localization and chess piece detection phases, mak-
ing it the first single-step chess digitizing method.
We focus on a simple and efficient design suitable
for mobile deployment. We propose methods using
simple geometry to (1) infer the bird’s eye view cen-
ter of a chess piece from its 2D bounding box and
(2) overcome some performance limitations of small
deep learning networks. We show that, compared to
current chess digitizers, our prototype trained on min-
imal data generalizes better to unseen camera angles
and is much smaller in model size.
2 RELATED WORK
2.1 Chess Digitization
Vision-based chess digitization is often split into
two phases – board localization and piece detection.
Board localization is the process of estimating the im-
age coordinates of each square on a chessboard. Piece
detection aims to estimate the class of each chess
piece and its location on the chessboard. Board lo-
calization is often done using traditional computer vi-
sion methods such as corner and edge detectors (Lu
et al., 2015; Harris and Stephens, 1988). Early works
on piece classification use hand-crafted features such
as HOG (Dalal and Triggs, 2005) and SIFT (Lowe,
2004), then shifted to using CNNs with the develop-
ment of deep learning. Currently, board localization
methods (Mallas
´
en Quintana et al., 2021; Czyzewski
et al., 2021) are quite accurate when the conditions
are good while chess piece classification remains the
bottleneck for full chess digitization, mainly due to
occlusion. A summary of recent methods are shown
in Tab. 1.
Our work is similar to the methodology in (Hack
and Ramakrishnan, 2014; Wang and Green, 2013;
Matuszek et al., 2011; Sokic and Ahic-Djokic, 2008),
where chess moves are identified by detecting the dif-
ferentials between one movement and the next. This
way, we omit the need for piece classification. How-
ever, in (Wang and Green, 2013; Matuszek et al.,
2011; Sokic and Ahic-Djokic, 2008), a camera is
placed directly over the board, which is not always
feasible. CVChess (Hack and Ramakrishnan, 2014)
addressed this perspective problem and aimed to dig-
itize at a lower camera angle. The authors localized
the board using Harris corner detectors (Harris and
Stephens, 1988) and SIFT and predicted chess moves
by computing the change in color of each square.
However, CVChess requires an initial empty chess-
board setup for board localization and does not take
into consideration the case when a human hand oc-
cludes the board. Hence, CVChess is not applica-
ble for the videos used in this study. Furthermore,
CVChess’s performance suffered from various factors
such as shadows, changes in lighting, and occlusion
among chess pieces.
2.2 Object Detection
Object detection is a fundamental task in computer
vision that involves localizing and classifying objects
in an image. Classical CNN-based object detectors
are often divided into two-stage and one-stage detec-
tors. Two-stage detectors, such as the R-CNN family
(He et al., 2020; Dai et al., 2016; Ren et al., 2015;
Girshick, 2015; Girshick et al., 2014), first generate
icSPORTS 2023 - 11th International Conference on Sport Sciences Research and Technology Support
52

Table 1: Computer vision-based chess digitization methods.
Method Description
ChessVision
(Ding, 2016)
Board localization: None. The user must manually select the four corners of the
board, which are used to estimate a projection matrix.
Piece detection: Support vector machines (SVMs) to classify chess pieces from
SIFT (Lowe, 2004) features.
Neural Chess
(Czyzewski et al.,
2021)
Board localization: 1) Canny detector (Lu et al., 2015) and CLAHE algorithm
(Reza, 2004) to detect line segments, a handcrafted linking function to combine line
segments, and an M-estimator-based algorithm (Wiens, 1996) to merge collinear
lines. 2) Preprocess (apply grayscale, Otsu method (Jassim and Altaani, 2013),
Canny detector, binarization) points where detected lines intersect and feed to a rule-
based detector for simple cases or a CNN-based detector for other cases to determine
lattice points. 3) An iterative algorithm to generate a heatmap from the detected
lattice points that represents the likelihood of each pixel being the chessboard.
Piece detection: Modified ChessVision by including physical properties of chess
pieces in input, clustering similar pieces, selecting most probable piece configu-
rations computed from a Stockfish chess engine (Stockfish, 2008). (A CNN im-
plementation was also tested but showed minimal improvements over the previous
SVM model.)
LiveChess2FEN
(Mallas
´
en Quintana
et al., 2021)
Board localization: Optimized Neural Chess to reduce cost and latency.
Piece detection: CNN to classify the chess piece in each square, followed by an
algorithm that uses chess rules as a constraint to refine the CNN output probability
vector (e.g. cannot have 3 Kings on the board).
Chesscog
(W
¨
olflein and
Arandjelovi
´
c, 2021)
Board localization: 1) Canny detector to detect lines. 2) DBSCAN clustering (Es-
ter et al., 1996) to merge similar lines. 3) A RANSAC-based algorithm to determine
lattice points from detected lines.
Piece detection: Occupancy classification using a CNN to determine if each square
contains a chess piece. Another CNN to classify the squares that contain a chess
piece.
region proposals in the image, then classify the pro-
posals in the second step. Single-stage detectors lo-
calize and classify objects in a single step, by making
predictions with respect to pre-defined anchors (Red-
mon and Farhadi, 2017; Liu et al., 2016; Lin et al.,
2020) or a grid of possible object centers (Tian et al.,
2019; Zhou et al., 2019; Law and Deng, 2020; Red-
mon et al., 2016).
Transformer-based object detectors such as DETR
(Carion et al., 2020) and its variants (Zhu et al.,
2021; Liu et al., 2022; Li et al., 2022; Zhang et al.,
2022) were recently proposed as end-to-end architec-
tures that omit the use of hand-designed components
such as spatial anchors and non-maximum suppres-
sion. Although improved classical detectors, such
as Dyhead (Dai et al., 2021) and HTC (Chen et al.,
2019) are still often regarded as the current best per-
forming object detectors, it could be interesting to test
transformer-based detectors in future work to see how
well the attention mechanism and set predictions can
capture the global structure of chess detections. In
this paper, we chose to use tiny single-stage detectors
for their computational efficiency and mobile friend-
liness.
3 SINGLE-STEP CHESS
DIGITIZATION
To combine the board localization and piece detec-
tion phases, we model both the corners of the chess-
board and chess pieces that moved as objects. We call
the chess pieces that moved change objects and for
notation, italicize “corner” to refer to the chessboard
corner objects. We take the image difference of two
video frames that occur before and after a move, and
VICE: View-Invariant Chess Estimation
53

from which, detect the change and corner simulta-
neously using a lightweight object detector. The de-
tected corners can then be used to compute a homog-
raphy matrix that projects the detected change objects
onto chessboard coordinates, which represent the pre-
vious and new locations of the chess pieces moved.
This information, combined with the previous match
state, allow us to infer the chess move and next match
state (Fig. 3).
For each corner K ∈ K = {A1, A8, H1, H8}, let
K
i
∈ K
i
be its image coordinates and K
B
∈ K
B
be its
chessboard coordinates. We set A1
B
= (0, 0), A8
B
=
(0, 8), H1
B
= (8, 0), H8
B
= (8, 8). Let H be the ho-
mography matrix computed by mapping K
i
to K
B
.
Change Objects: are shown in the red bounding
boxes in Fig. 4. They represent the previous and new
locations of chess pieces that moved. In a chess match
with M total moves, for any move m ∈ {1, ..., M},
let Π
m
be the chess piece(s)
1
that moved. Let s
m
be
the frame a player’s hand makes contact with the first
chess piece that is being moved and e
m
be the frame
the player releases the last piece moved. Let p be a
frame before move m, (e
m−1
< p < s
m
) and q be a
frame after move m, (e
m
< q < s
m+1
) where p and q
have the same camera position. The red boxes repre-
sent the locations of Π
m
in frames p and q.
Figure 4: Bounding boxes of change objects (red), corners
(blue), sides (purple).
For any change object c
j
, let c
i
j
= (x
i
j
, y
i
j
) be its
image coordinates and c
B
j
= (x
B
j
, y
B
j
) be its chessboard
coordinates. We denote c
B
j
= H(c
i
j
), or more rigor-
ously:
x
B
j
y
B
j
1
= H
x
i
j
y
i
j
1
(1)
To ensure our method is invariant to different
camera views and off-centered placements of chess
pieces, we set the BEV center of c
j
as its image co-
ordinates. Since no 3D bounding boxes were labeled,
1
Multiple chess pieces could be moved, such as during
castling.
we must infer the BEV centers from the 2D boxes.
The prevalent method in 3D object detection is to
tightly fit a 3D box inside the 2D box (Qin et al., 2022;
Liu et al., 2019; Naiden et al., 2019; Mousavian et al.,
2017). However, since the base of the chess piece is
usually a circle, the bottom side of the tightly fitted
3D box will almost always intersect with the 2D box
of the chess piece (see dashed blue square and red box
in Fig. 5). Furthermore, due to the many plausible 3D
boxes, the optimization steps are not only computa-
tionally expensive but also require the estimation of
local yaw. Lastly, we only need the bottom center of
the 3D box and not all 8 vertices.
Instead, we project the 2D box using the same ho-
mography matrix H and fit a circle tangent to the 3
sides (that does not include the top side) of the pro-
jected 2D box (Fig. 5). We take the center of this cir-
cle as the BEV center in chessboard coordinates c
B
j
.
Then the BEV center in image coordinates is simply
c
i
j
= H
−1
(c
B
j
). The center of this circle can be found
by intersecting the two angle bisectors of the 3 sides
of the projected 2D box. We make the assumption
that the bottom side of the 3D box that bounds each
chess piece is approximately square, which is usually
the case for most chess sets.
Figure 5: (Left): 2D bounding box of a chess piece in red.
Top side of the 2D box in dashed red. Base of the chess
piece in blue circle. The rest of the chess piece is not drawn.
Although the center of the bottom side of the 2D box (pur-
ple dot) is usually tangent to the chess piece, using it to infer
the chess piece’s board location could result in the wrong
grid, based on the placement of the chess piece and cam-
era angle. Instead it is better to use the BEV center (blue
dot). (Right): 2D box and chess piece base projected by ho-
mography matrix H. Since the 3 sides (not including the top
side) of the 2D box tightly bound the circle, the BEV center
can be found by connecting the 2 angle bisectors (grey dot-
ted lines) of the 3 sides.
Corner Objects: are shown in the blue bounding
boxes in Fig. 4, where the center of each box corre-
sponds to the image coordinates of a corner K
i
. To
account for depth, during labeling, we set the width
and height of each box based on how far each corner
can shift in a direction before producing a homogra-
phy matrix that leads to incorrect chess moves.
For corner K, let H
K
r
be the the homography ma-
icSPORTS 2023 - 11th International Conference on Sport Sciences Research and Technology Support
54

Table 2: Accuracy (Acc.) refers to the percentage of moves correctly inferred by VICE on unseen matches, under 4-fold
cross-validation, where each match is left out as the test set. 2-stage Acc. refer to the case where the corners are assumed to
be known. Mean corner error (MCE) is calculated in terms of Euclidean distance in pixels, grouped by correct and incorrect
move predictions (T; F). †- results shown for Match 2 are inferred after the detected corner labels were corrected by rotating
180
◦
in the BEV plane (A1 should be H8). ‡- Match 4 starts at move 2 since the camera position is inconsistent during the
first move.
Match 1: Match 2: Match 3: Match 4:
World Rapid 21 World Blitz 19 Tata Steel India 18 Tata Steel India 19
(Detector)
Carlsen, M.
vs. Firouzja, A.
Jobava, B.
vs. Carlsen, M.
Praggnanandhaa, R.
vs. Mamedyarov, S.
Ding, L.
vs. Aronian, L.
(YOLOX-nano) Acc. 81.0% 74.8%
†
72.3% 71.8%
MCE (T; F) 8.6; 9.9 9.7
†
; 11.0
†
10.3; 18.1 6.1; 18.9
2-step Acc. 88.6% 83.8% 85.1% 84.5%
(NanoDet-Plus-m) Acc. 66.7% 33.3%
†
74.3% 73.2%
MCE (T; F) 17.6; 31.3 15.3
†
; 218.8
†
10.7; 27.8 4.2; 15.9
2-step Acc. 94.3% 84.7% 91.9% 87.3%
(YOLOv5-nano) Acc. 71.4% - 45.3% 47.9%
MCE (T; F) 8.2; 17.3 - 6.8; 76.4 9.0; 37.9
2-step Acc. 84.8% 67.6% 83.1% 77.5%
Total moves (435): 105 111 148 71
‡
trix estimated after shifting K
i
to the right by r pixels
with the other three corners fixed. Since we only re-
quire the integer value of the chessboard coordinates
to infer the chess move, we set r
K
= max(r) such that
ceiling(H
K
r
(c
i
j
)) = ceiling(H(c
i
j
)) is true for all c
j
.
Similarly, denote l, u, d as the left, up, down directions
respectively. We set w
K
= min(l
K
, r
K
) as the width
and h
K
= min(u
K
, d
K
) as the height of the bounding
box for K.
If a corner class is not found during inference,
the homography matrix can not be estimated, and the
chess move will not be inferred. To remedy this,
we also detect the four sides of the chessboard. The
bounding boxes for each side (purple in Fig. 4) are
created by simply using the two neighboring chess-
board corners as opposite diagonal corners of the
bounding box so no additional labeling is required.
The combination of corner and side detections allows
us to infer and localize the chessboard with missing
detections. We found side objects to be more robust as
there were far fewer missing sides than missing cor-
ners during inference (see Tab. 4).
4 EXPERIMENTS
We annotated 4 YouTube videos (ChessBaseIn-
dia, 2022; ChessBaseIndia, 2020b; ChessBaseIn-
dia, 2019; ChessBaseIndia, 2020a) of different chess
matches with different camera angles and lighting and
evaluate VICE’s ability to digitize unseen camera an-
gles using 4-fold cross-validation. In each fold, we
leave out a different chess match as the test set and
train a lightweight single-stage object detectors on
the remaining 3 matches to detect the corner, side
and change objects. We compare the performance of
two keypoint-based detectors, NanoDet-Plus-m (Lyu,
2021) and YOLOX-nano (Ge et al., 2021), and one
anchor-based method, YOLOv5-nano (Jocher, 2020).
All runs are trained for 50 epochs, using the de-
fault training settings and data augmentation configu-
rations for each object detector. Results are shown in
Tab. 2. Implementation is detailed below in Sec. 4.1,
4.2.
4.1 Frame Pair Sampling
For chess move m, we sample frames p and q that
occur before and after m and have the same camera
angle, where e
m−1
< p < s
m
and e
m
< q < s
m+1
to
create frame pair (p, q). For the first and last moves,
VICE: View-Invariant Chess Estimation
55
we let e
0
= s
1
− 5 and s
M+1
= e
M
+ 5.
To ensure our method is able to deal with human
hands occluding the chessboard, we sample 4 types of
frame pairs, F
i
:
• F
1
=
S
j
(p
j
1
, q
j
1
) with all possible combinations of
p
j
1
∈ {s
m
− 1, s
m
}, q
j
1
∈ {e
m
, e
m
+ 1}.
• F
2
=
S
j,k
(p
j
2
, q
j,k
2
) contains at most 6 pairs. For
each p
j
2
∈ {s
m
− 1, s
m
}, randomly sample 3 times:
q
j,k
2
∈ {e
m
+ 2, ..., s
m+1
}, k = 1, 2, 3.
• F
3
=
S
j,k
(p
j,k
3
, q
j
3
) contains at most 6 pairs. For
each q
j
3
∈ {e
m
, e
m+1
}, randomly sample 3 times:
p
j,k
3
∈ {e
m−1
, ..., s
m
− 2}, k = 1, 2, 3.
• F
4
=
S
j
(p
j
4
, q
j
4
) contains at most 6 pairs. For
each j = 1, ..., 6, randomly sample: p
j
4
∈
{e
m−1
, ..., s
m
− 2}, q
j
1
∈ {e
m
+ 2, ..., s
m+1
}.
Since a human hand is always partially occluding the
board around frames s
m
and e
m
, sets F
1
, F
2
, F
3
will
always contain a hand. Set F
4
will contain other ran-
dom frames.
Next, we take the weighted image difference of a
frame pair (p, q) as ∆
pq
. Let I
j
be the image at frame
j. For frame pair (p, q), we have:
∆
pq
= w
p
I
p
− w
q
I
q
(2)
Since most chess sets contain chess pieces of just two
colors, we convert ∆
pq
to grayscale. In Tab. 4, we
show that grayscaling improves the results. Lastly,
we apply min-max normalization; hence the values
of weights w
p
, w
q
are not important as long as w
p
̸=
w
q
. In our experiments we set w
p
= 1.5 and w
q
= 1.
From each ∆
pq
, we detect the change, corner and side
objects.
4.2 Inference
We use the center of the bounding box of each de-
tected corner as its image coordinates. If a corner
class is not found, we take the average of the 2 clos-
est corners of the bounding boxes of the neighboring
sides. Let S
KL
be a side that connects corners K and
L and let Γ
KL
be the set of its 4 bounding box cor-
ners. For example, if corner K is not detected, we find
γ
KL
∈ Γ
KL
and γ
JK
∈ Γ
JK
by minimizing ||γ
KL
, γ
JK
||
2
,
and take mean(γ
KL
, γ
JK
) as the detected image coor-
dinate for K (see Fig. 6: inferred H8 in case 1 and
inferred H8 in case 2).
If a corner K is not found and only one neighbor-
ing side S
KL
is detected with bounding box corner γ
∗
KL
closest to corner L (or is used to compute L), we set
γ
KL
as the detected image coordinate for K, where γ
KL
and γ
∗
KL
are opposite diagonal corners of the bounding
box of S
KL
(see Fig. 6: inferred A8 in case 1, inferred
A8 in case 2 and inferred H1 in case 3). We denote all
other situations as failure cases.
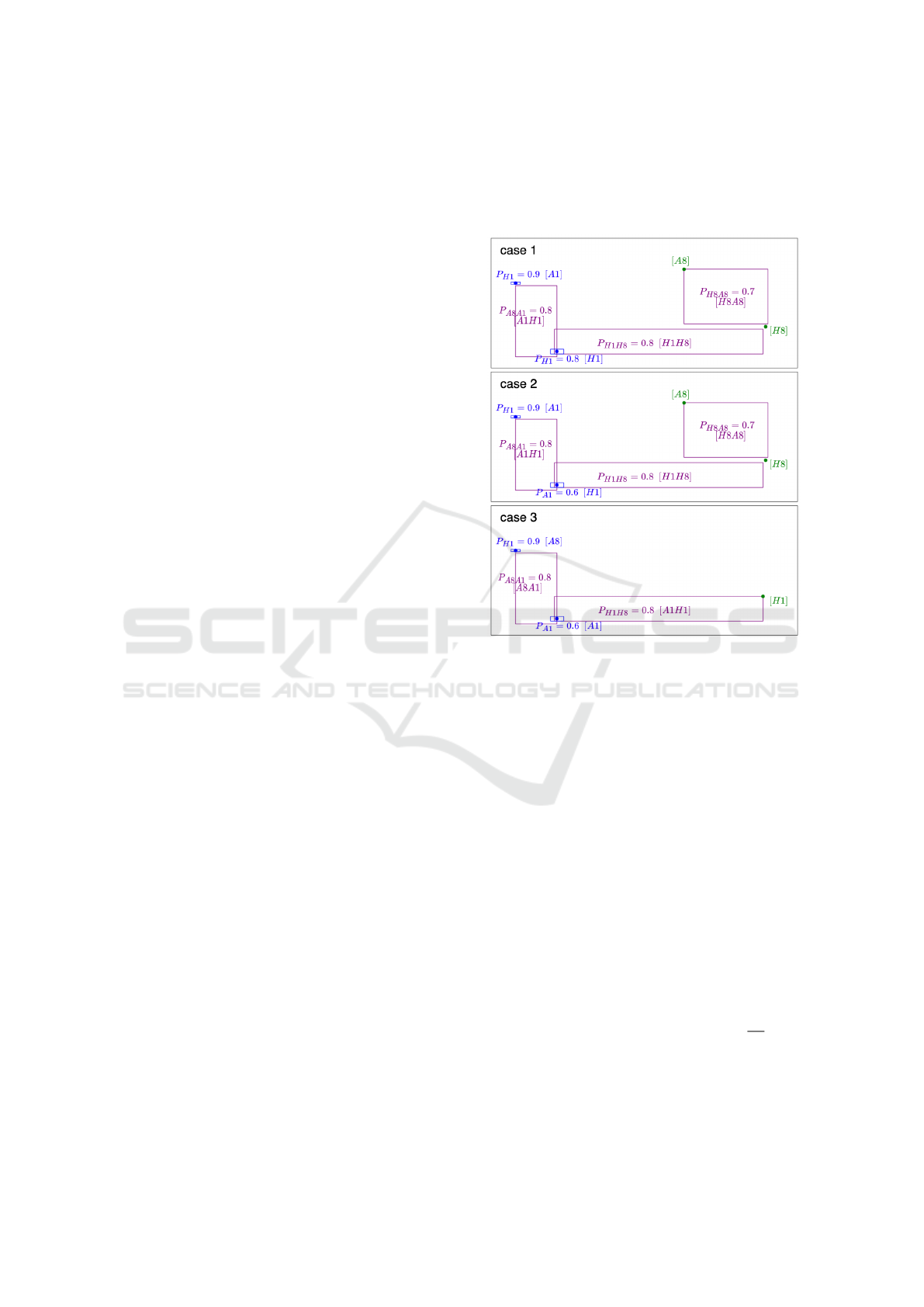
Figure 6: Detected side bounding boxes in purple, where
P
κ
= ρ indicates that the detection is of class κ with proba-
bility score ρ. Inferred class in square brackets. Similarly,
detected corners in blue. Inferred corner locations in green.
Case 3 is a failure case since the location of H8 cannot be
inferred.
We found that, although the locations of the detec-
tions were adequate, the predicted class labels were
inconsistent. This is likely due to the limited per-
formance of tiny object detectors trained on minimal
data. However, since the order of the corner labels of
a chessboard is fixed in the counterclockwise direc-
tion (as long as the camera is above the chessboard),
there are only 4 possible permutations of corner la-
bels and we can “guess” which labels are misclassi-
fied based on the predicted locations.
We set the center of the chessboard as the mean of
the bounding box centers of all predicted corners and
sides. We take the detections with the highest prob-
ability scores and keep at most 4 sides and at most 4
corners, ensuring that the angle between neighboring
sides with respect to the center is at least (
180
8
)
◦
, and
at most 1 corner can be between two sides. Then we
check all 4 possible permutations of true labels and
select the one that has the most matches with the pre-
dicted labels (Fig. 6 case 1 and 3). If there is a tie,
icSPORTS 2023 - 11th International Conference on Sport Sciences Research and Technology Support
56
Table 3: The top performing versions of LiveChess2FEN and Chesscog shown. Total moves inferred are computed from rows
1, 4, 7 from Tab. 2.
Method
Version
(backbone/head)
Size
(MB)
Moves
inferred
LiveChess2FEN (Mallas
´
en Quintana et al., 2021) (Xception) 176.4 -
Chesscog (W
¨
olflein and Arandjelovi
´
c, 2021) (InceptionV3) 142.7 -
VICE (ours) (YOLOX-n) 1.8 75%
(NanoDet-P-m) 2.3 62%
(YOLOv5-n) 3.8 40%
we select the combination with the highest probabil-
ity score sum among the matched labels (Fig. 6 case
2).
For frame pair (p, q), let C
i
pq
be the set of its de-
tected change objects with probability scores over 0.5
and H
pq
be the homography matrix computed by the
detected corners. We project all change objects onto
chessboard coordinates using H
pq
and take the ceiling
as the set of detections D
pq
for frame pair (p, q):
D
pq
= {ceiling(H
pq
(c
i
pq
)); c
i
pq
∈ C
i
pq
} (3)
Let P
m
be the set of all frame pairs associated with
move m and D
m
be the set of all detections for move
m:
D
m
=
[
pq∈P
m
D
pq
(4)
If D
m
contains 2 unique detections, they are set as
the previous and new locations of the chess piece that
moved during m. If D
m
contains more than 2 unique
detections, we take the top 3 most frequent detections
and check if the coordinates fit any castling cases. If
so, we output the corresponding castling case as move
m. If not, we take the top 2 most frequent detections
to infer move m. We denote all other situations as
failure cases.
4.3 Results
Rows 1, 4, 7 of Tab. 2 show the percentage of moves
VICE correctly infers in each unseen match using
3 different object detectors, with YOLOX-nano out-
performing the others. The YOLOv5-nano version
was unable to produce reasonable corner detections
for Match 2. Although the results show that VICE
was able to generalize to matches of new camera an-
gles with limited training data, the corner labels pre-
dicted in Match 2 were all off by 180
◦
in the BEV
plane (A1 should be H8). Hence, the results
†
shown
in Tab. 2 for Match 2 are from the corrected corner
detections. In practice, checking all 4 sets of results
generated by the 4 possible permutations is still rea-
sonable since the other 3 sets will very likely produce
illegal chess moves. Current state-of-the-art vision-
based chess digitizers such as Chesscog (W
¨
olflein
and Arandjelovi
´
c, 2021) and LiveChess2FEN (Mal-
las
´
en Quintana et al., 2021) also require the user to
input the orientation of the board. Future versions of
VICE can mitigate this problem by increasing train-
ing data diversity and expanding the data augmenta-
tion configuration to improve generalizability. As a
prototype, VICE only includes the minimal inference
scheme described in Sec. 4.2. Future versions can im-
plement a grouping network to produce a more robust
set of corners.
We calculate mean corner error (MCE) in terms of
Euclidean distance in pixels between the detected and
true corners. Rows 2, 5, 8 of Tab. 2 show the MCE
of frame pairs that correctly and incorrectly inferred
chess moves. Small errors in corner detections could
lead to a chess piece projected to a square that neigh-
bors its true square. Other than checking for castling,
VICE does not include further postprocessing of pre-
dictions. Future versions can add a simple module
to check and remove predictions that produced illegal
chess moves. A chess engine could also be connected
to produce chess move probabilities to regulate the
predictions. This is done in existing methods such
as (Mallas
´
en Quintana et al., 2021; Czyzewski et al.,
2021).
Rows 3, 6, 9 of Tab. 2 investigate how well our
method works under the classical two-step chess esti-
mation approach. We assume the corner locations are
known and evaluate the change detections only. We
find that NanoDet outperforms the other object de-
tectors in this case. The overall improvement in per-
formance of the two-step approach reinforces the fact
that much of the error arises from the corners. Future
versions of VICE should optimize training parameters
to focus more on corner detection.
In Tab. 3, we compare VICE to LiveChess2FEN
and Chesscog, which are both much larger in size.
Since the two other methods infer game states from
images, we run their algorithms on all of the frames
sampled to form the frame pairs in our study. If the
VICE: View-Invariant Chess Estimation
57

Table 4: Total missing corners”/sides are computed as the sum of corner/side classes not detected from each frame pair. If
all frame pairs associated with a move have at least one missing corner detection, we say the move has missing corners and
no move prediction can be generated (row 3). [corners] refer to the inferred corners described in Sec. 4.2 using the side
detections. Results in this table are generated from using the YOLOX-nano detector.
M1 M2 M3 M4
Total frame pairs 2262 2246 3148 1463
Total missing corners 1244 481 1519 871
Moves with missing corners 19 1 1 2
Total missing sides 0 128 24 480
Moves with missing [corners] 0 0 0 0
Grayscale Acc. 81% 75%
†
72% 72%
RGB Acc. 63% 59%
†
35% 48%
algorithm correctly identifies the game state in both
frames of a frame pair, a move is correctly inferred.
We use the version of LiveChess2FEN that uses a
Xception backbone and Chesscog with an Incep-
tionV3 backbone, since they were the top performing
models in their respective papers. LiveChess2FEN
was able to localize the board for 12.7% of the frames
in Match 1 and 97.1% of the frames in Match 3 but
was not able to correctly infer any game states. Chess-
cog was able to localize the board in 24.7% of the
frames for match 3 but was not able infer the game
states. Since (W
¨
olflein and Arandjelovi
´
c, 2021) re-
quires certain perspectives of the board as input (ei-
ther A1 or H8 are at the bottom left corner), we tested
using both the original image as input and the image
rotated 90
◦
.
Lastly, rows 2-5 of Tab. 4 show how the side ob-
jects helped with missing corner detections, as de-
scribe in Sec. 4.2. Future versions of VICE can in-
corporate global constraints such as (Gu et al., 2022)
or set prediction approaches (Kuhn, 1955) to replace
or complement the side objects. Rows 6-7 of Tab. 4
show the improved performance after grayscaling the
image difference.
5 CONCLUSION
We introduced VICE, the first single-step chess dig-
itizer that is capable of inferring chess moves from
camera angles that current vision-based chess digi-
tizers cannot. This allows chess players to automate
the tracking of their in-person chess matches without
the intrusiveness of a phone or camera placed directly
above the chessboard, and is a cost-effective alterna-
tive to using electronic chessboards.
Our prototype is conceptually simple in design
and focuses on computational efficiency and mobile
friendliness. In Sec. 3 and Sec. 4.2, we presented
methods using simple geometry to overcome some
limitations in performance of tiny object detectors
trained on minimal data. In Sec. 4.3, we showed
that, compared to current vision-based chess digitiz-
ers, VICE generalizes better to unseen camera angles
and is much smaller in model size. In Sec. 4.3, we
discussed the shortcomings of our prototype and pro-
posed how it can be improved with existing method-
ology.
ACKNOWLEDGEMENTS
We acknowledge financial support from the Canada
Research Chairs Program.
REFERENCES
Carion, N., Massa, F., Synnaeve, G., Usunier, N., Kirillov,
A., and Zagoruyko, S. (2020). End-to-end object de-
tection with transformers. In Lecture Notes in Com-
puter Science, volume 12346 LNCS.
Chen, K., Pang, J., Wang, J., Xiong, Y., Li, X., Sun, S.,
Feng, W., Liu, Z., Shi, J., Ouyang, W., Loy, C. C.,
and Lin, D. (2019). Hybrid task cascade for instance
segmentation. In Proceedings of the IEEE Computer
Society Conference on Computer Vision and Pattern
Recognition.
ChessBaseIndia (2019). Praggnanandhaa vs mamedyarov,
tata steel chess india blitz 2018. https:// www.youtube.
com/watch?v=ihzGKl2V4iE.
ChessBaseIndia (2020a). Ding liren vs levon aronian, find
the surprise move! tata steel chess india blitz 2019.
https://www.youtube.com/watch?v=sQcN9Zq3m-w.
ChessBaseIndia (2020b). Magnus carlsen’s killer move
stuns jobavan, world blitz 2019. https://www.youtube.
com/watch?v=CUb76s1ZDb0.
ChessBaseIndia (2022). Magnus carlsen vs alireza firouzja,
full game, watch until the end, world rapid 2021.
https://www.youtube.com/watch?v=1WEyUZ1SpHY.
icSPORTS 2023 - 11th International Conference on Sport Sciences Research and Technology Support
58

Czyzewski, M. A., Laskowski, A., and Wasik, S. (2021).
Chessboard and chess piece recognition with the sup-
port of neural networks. Foundations of Computing
and Decision Sciences, 45.
Dai, J., Li, Y., He, K., and Sun, J. (2016). R-fcn: Object de-
tection via region-based fully convolutional networks.
In Advances in Neural Information Processing Sys-
tems.
Dai, X., Chen, Y., Xiao, B., Chen, D., Liu, M., Yuan, L.,
and Zhang, L. (2021). Dynamic head: Unifying ob-
ject detection heads with attentions. In Proceedings of
the IEEE Computer Society Conference on Computer
Vision and Pattern Recognition.
Dalal, N. and Triggs, B. (2005). Histograms of oriented
gradients for human detection. In Proceedings - IEEE
Computer Society Conference on Computer Vision
and Pattern Recognition.
Danner, C. and Kafafy, M. (2015). Visual chess recogni-
tion. https:// web.stanford.edu/ class/ ee368/Project\
Spring\ 1415/Reports/ Danner\ Kafafy.pdf .
DGT (1998). Electronic chessboards. http:
//digitalgametechnology.com.
Ding, J. (2016). Chessvision : Chess board and piece recog-
nition. https:// web.stanford.edu/ class/cs231a/ prev\
projects\ 2016/ CS\ 231A\ Final\ Report.pdf .
Ester, M., Kriegel, H.-P., Sander, J., and Xu, X. (1996).
A density-based algorithm for discovering clusters in
large spatial databases with noise. In Proceedings of
the 2nd International Conference on Knowledge Dis-
covery and Data Mining.
Ge, Z., Liu, S., Wang, F., Li, Z., and Sun, J. (2021).
Yolox: Exceeding yolo series in 2021. ArXiv,
abs/2107.08430.
Girshick, R. (2015). Fast r-cnn. In International Conference
on Computer Vision.
Girshick, R., Donahue, J., Darrell, T., and Malik, J. (2014).
Rich feature hierarchies for accurate object detection
and semantic segmentation. In Proceedings of the
IEEE Computer Society Conference on Computer Vi-
sion and Pattern Recognition.
Gonc¸alves, J., Lima, J., and Leit
˜
ao, P. (2005). Chess robot
system : a multi-disciplinary experience in automa-
tion. In Spanish Portuguese Congress on Electrical
Engineering; AEDIE: Marbella, Spain.
Gu, J., Wu, B., Fan, L., Huang, J., Cao, S., Xiang, Z., and
Hua, X.-S. (2022). Homography loss for monocular
3d object detection. In Proceedings of the IEEE Com-
puter Society Conference on Computer Vision and
Pattern Recognition.
Hack, J. and Ramakrishnan, P. (2014). Cvchess:
Computer vision chess analytics. https:
//cvgl.stanford.edu/teaching/ cs231a\ winter1415/
prev/ projects/chess.pdf .
Harris, C. G. and Stephens, M. J. (1988). A combined cor-
ner and edge detector. In Alvey Vision Conference.
He, K., Gkioxari, G., Doll
´
ar, P., and Girshick, R. (2020).
Mask r-cnn. IEEE Transactions on Pattern Analysis
and Machine Intelligence, 42.
Jassim, F. A. and Altaani, F. H. (2013). Hybridization of
otsu method and median filter for color image seg-
mentation. ArXiv, abs/1305.1052.
Jocher, G. (2020). ultralytics/yolov5: v6.2 - YOLOv5.
https://github.com/ultralytics/ yolov5.
Keener, G. (2022). Chess is booming. The New York Times.
Khan, A. M. and Kesavan, R. (2014). Design and devel-
opment of autonomous chess playing robot. In Int. J.
Innov. Sci. Eng. Technol., pages 1–4.
Kuhn, H. W. (1955). The hungarian method for the assign-
ment problem. Naval Research Logistics (NRL), 52.
Law, H. and Deng, J. (2020). Cornernet: Detecting objects
as paired keypoints. International Journal of Com-
puter Vision, 128.
Li, F., Zhang, H., Liu, S., Guo, J., Ni, L. M., and Zhang, L.
(2022). Dn-detr: Accelerate detr training by introduc-
ing query denoising. In Proceedings of the IEEE/CVF
Conference on Computer Vision and Pattern Recogni-
tion, pages 13619–13627.
Lin, T. Y., Goyal, P., Girshick, R., He, K., and Dollar, P.
(2020). Focal loss for dense object detection. IEEE
Transactions on Pattern Analysis and Machine Intel-
ligence, 42.
Liu, L., Lu, J., Xu, C., Tian, Q., and Zhou, J. (2019). Deep
fitting degree scoring network for monocular 3d ob-
ject detection. In Proceedings of the IEEE Computer
Society Conference on Computer Vision and Pattern
Recognition.
Liu, S., Li, F., Zhang, H., Yang, X., Qi, X., Su, H., Zhu, J.,
and Zhang, L. (2022). DAB-DETR: Dynamic anchor
boxes are better queries for DETR. In International
Conference on Learning Representations.
Liu, W., Anguelov, D., Erhan, D., Szegedy, C., Reed, S., Fu,
C. Y., and Berg, A. C. (2016). Ssd: Single shot multi-
box detector. In Lecture Notes in Computer Science,
volume 9905 LNCS.
Lowe, D. G. (2004). Distinctive image features from scale-
invariant keypoints. International Journal of Com-
puter Vision.
Lu, X., Yao, J., Li, K., and Li, L. (2015). Cannylines: A
parameter-free line segment detector. In Proceedings -
International Conference on Image Processing, ICIP.
Lyu, R. (2021). Nanodet-plus: Super fast and high accuracy
lightweight anchor-free object detection model. https:
//github.com/RangiLyu/nanodet.
Mallas
´
en Quintana, D., Del Barrio Garc
´
ıa, A. A., and Pri-
eto Mat
´
ıas, M. (2021). Livechess2fen: A framework
for classifying chess pieces based on cnns. ArXiv,
abs/2012.06858.
Matuszek, C., Mayton, B., Aimi, R., Deisenroth, M. P., Bo,
L., Chu, R., Kung, M., Grand, L. L., Smith, J. R.,
and Fox, D. (2011). Gambit: An autonomous chess-
playing robotic system. In Proceedings - IEEE Inter-
national Conference on Robotics and Automation.
McNally, W., Walters, P., Vats, K., Wong, A., and McPhee,
J. (2021). Deepdarts: Modeling keypoints as ob-
jects for automatic scorekeeping in darts using a single
camera. In Proceedings of the IEEE/CVF Conference
on Computer Vision and Pattern Recognition (CVPR)
Workshops, pages 4547–4556.
VICE: View-Invariant Chess Estimation
59

Mousavian, A., Anguelov, D., Ko
ˇ
seck
´
a, J., and Flynn, J.
(2017). 3d bounding box estimation using deep learn-
ing and geometry. In Proceedings - IEEE Conference
on Computer Vision and Pattern Recognition.
Naiden, A., Paunescu, V., Kim, G., Jeon, B., and
Leordeanu, M. (2019). Shift r-cnn: Deep monocular
3d object detection with closed-form geometric con-
straints. In Proceedings - International Conference
on Image Processing, ICIP.
Qin, Z., Wang, J., and Lu, Y. (2022). Monogrnet: A general
framework for monocular 3d object detection. IEEE
Transactions on Pattern Analysis and Machine Intel-
ligence, 44.
Redmon, J., Divvala, S., Girshick, R., and Farhadi, A.
(2016). You only look once: Unified, real-time ob-
ject detection. In Proceedings of the IEEE Computer
Society Conference on Computer Vision and Pattern
Recognition.
Redmon, J. and Farhadi, A. (2017). Yolo9000: Better,
faster, stronger. In Proceedings - 30th IEEE Confer-
ence on Computer Vision and Pattern Recognition.
Ren, S., He, K., Girshick, R., and Sun, J. (2015). Faster
r-cnn: Towards real-time object detection with region
proposal networks. In Advances in Neural Informa-
tion Processing Systems.
Reza, A. M. (2004). Realization of the contrast limited
adaptive histogram equalization (clahe) for real-time
image enhancement. Journal of VLSI Signal Process-
ing Systems for Signal, Image, and Video Technology,
38.
Sokic, E. and Ahic-Djokic, M. (2008). Simple computer
vision system for chess playing robot manipulator as
a project-based learning example. In Proceedings of
the 8th IEEE International Symposium on Signal Pro-
cessing and Information Technology.
SquareOff (2018). Intelligent chessboard. https://
squareoffnow.com.
Stockfish (2008). Open source chess engine. https://
stockfishchess.org.
Tian, Z., Shen, C., Chen, H., and He, T. (2019). Fcos: Fully
convolutional one-stage object detection. In Proceed-
ings of the IEEE International Conference on Com-
puter Vision.
Wang, V. and Green, R. (2013). Chess move tracking using
overhead rgb webcam. In International Conference
Image and Vision Computing New Zealand.
Wiens, D. P. (1996). Asymptotics of generalized m -
estimation of regression and scale with fixed carriers,
in an approximately linear model. Statistics and Prob-
ability Letters, 30.
W
¨
olflein, G. and Arandjelovi
´
c, O. (2021). Determining
chess game state from an image. Journal of Imaging,
7(6).
Zhang, H., Li, F., Liu, S., Zhang, L., Su, H., Zhu, J., Ni,
L. M., and Shum, H.-Y. (2022). Dino: Detr with im-
proved denoising anchor boxes for end-to-end object
detection. ArXiv, abs/2203.03605.
Zhou, X., Wang, D., and Kr
¨
ahenb
¨
uhl, P. (2019). Objects as
points. ArXiv, abs/1904.07850.
Zhu, X., Su, W., Lu, L., Li, B., Wang, X., and Dai, J.
(2021). Deformable detr. In International Conference
on Learning Representations.
icSPORTS 2023 - 11th International Conference on Sport Sciences Research and Technology Support
60
