
Probabilistic Physics-Augmented Neural Networks for Robust Control
Applied to a Slider-Crank System
Edward Kikken
a
, Jeroen Willems
b
, Rob Salaets
c
and Erik Hostens
d
Flanders Make, Lommel, Belgium
fl
Keywords:
Neural Networks, Physics-Augmented Neural Networks, Probablistic Neural Networks, Optimal Control,
Robust Control, Physics-Informed AI, Non-Linear Dynamic Systems Modelling.
Abstract:
Key industrial trends such as increasing energy and performance requirements as well as mass customization,
lead to more complex non-linear machines with many variants. For such systems, variability in dynamics arising
from many factors significantly affects performance. To capture this adequately we introduce a probabilistic
extension of a Physics-Augmented Neural Network (PANN). We subsequently illustrate the added value of
such models in robust optimal control, thereby keeping performance high while guaranteeing to meet the
application’s constraints. The approach is validated on a experimental slider-crank mechanism, which is
ubiquitous in industrial machines.
1 INTRODUCTION
The industrial need for reduced energy consumption,
increased throughput and increased production ac-
curacy leads to ever-increasing performance require-
ments for mechatronic systems. These requirements
result in more complex machines with e.g., input sat-
urations, flexible behavior, highly non-linear compo-
nents, many degrees of freedom (DOFs) needing to
be coordinated efficiently. To further complicate mat-
ters, the current trend towards mass customization
increases the number of system variants. On top of
that, intrinsic fluctuations in system behavior due to
e.g., changing operating temperatures, wear, friction
lead to additional variability.
This increase in system complexity and variability
poses challenges to model and control these systems:
(i) the complex dynamics need to be accurately mod-
elled to enable high-performance control; (ii) many
models and controllers need to be developed for all
the system variants; (iii) models need to capture the
intrinsic variability; and (iv) controllers need to be sta-
ble and performant not only for the nominal dynamics,
but for the full range of variability, without resulting
in unnecessary conservative and sub-optimal control.
a
https://orcid.org/0000-0002-5769-5814
b
https://orcid.org/0000-0002-2727-6096
c
https://orcid.org/0000-0002-4835-0793
d
https://orcid.org/0000-0003-2482-7523
In industry, models targeted for model-based op-
timal control are derived from physical knowledge.
However, with ever-increasing system complexity and
variability this is becoming more-and-more labor in-
tensive and requires more-and-more expert knowledge.
The alternative approach is to build data-driven mod-
els. The methods for classical system identification
have been around for a long time (Ljung, 1998) and
are usually employed for linear or linearized systems.
These methods have also been extended for nonlin-
ear system identification with great effect, but often
require specialized numerical procedures (Schoukens
and Ljung, 2019). The success of Machine Learning
(ML) techniques as generic non-linear modelling tools
has motivated to use algorithms such as neural net-
works (NNs) in a Nonlinear Finite Impulse Response
(NFIR) setup or recurrent neural networks (RNNs).
They can be used to fit dynamic systems using limited
expert knowledge (Forgione and Piga., 2020; Chen
et al., 2019; De Groote et al., 2021a; Beintema et al.,
2021). Furthermore, auto-differentiation as supported
by frameworks such as Pytorch (Paszke et al., 2019)
and Tensorflow (Abadi et al., 2015) has enabled signifi-
cant computational speed-up of nonlinear system iden-
tification. However, purely data-driven approaches
have some downsides compared to physical modelling:
they require more data since they have more parame-
ters, they extrapolate poorly outside of the operating
domain covered by the training data, and interpretabil-
ity of parameters is lost.
152
Kikken, E., Willems, J., Salaets, R. and Hostens, E.
Probabilistic Physics-Augmented Neural Networks for Robust Control Applied to a Slider-Crank System.
DOI: 10.5220/0012168200003543
In Proceedings of the 20th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2023) - Volume 1, pages 152-161
ISBN: 978-989-758-670-5; ISSN: 2184-2809
Copyright © 2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)

To find a middle ground between these two ap-
proaches, various approaches have been researched.
They can be organized into two main categories (Kar-
niadakis et al., 2021):
•
Physics-Inspired Neural Networks (PINNs) start
from a neural network and enforce physical laws
in the loss function of the NN (Yang et al., 2021;
Raissi et al., 2019; Schiassi et al., 2021);
•
Physics-Augmented Neural Networks (PANNs)
start with a physical model, and augment it with
NNs in its dynamic equations (De Groote et al.,
2021a; De Groote et al., 2021b).
In this work we will extend PANNs by not only mod-
elling the nominal deterministic behavior of a dynamic
system, but also its variability and uncertainty. To do
so, we will use the concept of a Probabilistic Neural
Net (PNN) (Streit and Luginbuhl, 1994; Bishop, 1994;
Lakshminarayanan et al., 2017). Modeling probability
distributions with NNs is common practice, and its
pitfalls are well known (Seitzer et al., 2022; Bishop,
1994). PNNs do not only capture aleatoric uncertainty
on the predicted outputs, but also cover the model bias
if present. Strongly linked with uncertainty modelling
are methods that estimate the epistemic uncertainty,
as represented by the parameter uncertainty, such as
Bayesian Neural Networks (Goan and Fookes, 2020),
Monte-Carlo Dropout (Gal and Ghahramani, 2016)
or Gaussian Stochastic Weight Averaging (Morimoto
et al., 2022). These works complement the techniques
in this paper, but we leave epistemic uncertainty out
of this analysis. We assume here that sufficient data is
available such that the epistemic uncertainty is negligi-
ble as compared to the aleatoric uncertainty.
To control complex non-linear systems one must
move away from classical control approaches (e.g.,
PID, simple model-based or ad hoc engineered
feedforward) towards more powerful model-based
optimization-based techniques. Such methods can deal
with constraints, use preview, handle complex and non-
linear behavior and coordinate multiple DOFs (Forbes
et al., 2015), by exploiting the prediction capabilities
of dynamic models such as PANNs, see for example
(Salzmann et al., 2022; Spielberg et al., 2022; Kikken
et al., 2022). We have extended these approaches
to also include uncertainty, resulting in a robust con-
troller, inspired by the robust optimal control prob-
lem (OCP) for physical models developed in (Willems
et al., 2018).
To experimentally validate the approach, it has
been applied to a slider-crank setup that converts the
rotary movement of a motor into a linear movement.
Such mechanisms are ubiquitous in industry, e.g.,
weaving looms, piston compressors, etc. We will as-
sume some initial physical relations of the setup are
known (e.g., kinematics, some physical parameters),
but all missing dynamics will be automatically found
using the PPANN techniques.
The remainder of this paper is organized as fol-
lows. Section 2 introduces the proposed methodology.
We discuss the structure of a physics-augmented neu-
ral network and extend it to our probabilistic variant.
Next, we detail the formulation of the optimal control
problem and how it is extended to exploit the PPANN’s
uncertainty to find a robust solution. Section 3 intro-
duces the slider-crank setup on which the developed
algorithms are experimentally validated. We explain
how we generated a dataset on this setup, on which we
have trained the PPANN that is subsequently used to
solve the robust optimal control problem. This OCP
solution is experimentally validated thereby demon-
strating the advantage of the proposed approach. Fi-
nally, we formulate our conclusions and future work
in Section 4.
2 METHODOLOGY
2.1 Notation
We consider a (non-)linear dynamic model in the form
of a set of ordinary differential equations (ODE) repre-
sented in state-space, i.e., explicit format (see Eq. 1a),
or implicit format (see Eq. 1b). These continuous-time
models are given in the form of:
ˆ
˙x(t) = f (x(t), u(t), p), (1a)
0 = f (x(t), u(t), p), (1b)
where
x ∈ R
n
x
and
ˆx ∈ R
n
x
denote the measured and
(when applicable) model-predicted state variables re-
spectively (different for the two ODE variants),
u ∈
R
n
u
the inputs,
p ∈ R
n
p
the model parameters and func-
tion
f
denotes the ODE function. For the considered
class of models, we assume all states are observable,
so an output function is omitted.
When sampling time
t
, we denote a specific time
instant as
t
k
with
k ∈
[1
, N
], with
N
the number of time
samples. For notational compactness we will denote
any time dependent signal
y
(
t
), sampled at time instant
k, as y
k
(and similar for e.g., u
k
, x
k
, ˙x
k
).
2.2 Combining Data-Driven and
Physical Modelling
In this section, we will first describe the architecture of
the combined physical equations and neural networks
(PANN) and the used approach for training. Secondly,
we will extend the PANN towards the proposed proba-
bilistic modelling and training approach (PPANN).
Probabilistic Physics-Augmented Neural Networks for Robust Control Applied to a Slider-Crank System
153

2.2.1 Physics-Augmented Neural Networks
A PANN integrates a (or multiple) neural network(s)
into physical equations. These physical equations
are expressed as an explicit ODE based on lumped
physical parameters p
phys
. A PANN’s function f con-
tains the physical equations but also a neural network
that captures unmodelled phenomena
z
that depend on
states and/or control inputs e.g., a state dependent load,
complex friction or efficiency maps. For these effects
no analytical expression has been derived and they
cannot be experimentally measured directly. Note that
the inputs to the neural network are often normalized,
scaled or passed through some engineered static func-
tion, which we will denote with
g
. The above results
in the following general dynamic equation that is con-
sidered throughout this paper where neural network
parameters (i.e., weights and biases)
p
NN
and physical
parameters p
phys
need to be identified:
ˆ
˙x(t) = f (x(t), u(t), z(g(x(t), u(t)), p
NN
), p
phys
). (2)
For notational convenience we will often write Eq. 2
in the simplified and time-sampled form:
ˆ
˙x
k
= f (x
k
, u
k
, z
k
, p), (3)
where
p
denotes the combination of
p
NN
and
p
phys
.
The derivative function of the PANN can then be prop-
agated forward in time using Euler’s method to get the
state propagation in discrete-time:
ˆx
k+1
= f (x
k
, u
k
, z
k
, p)∆t + x
k
, (4)
where ∆
t
denotes the time step of the forward Euler
time integration and
ˆx
k+1
the model-predicted new
state. Other time-integration schemes can also be used
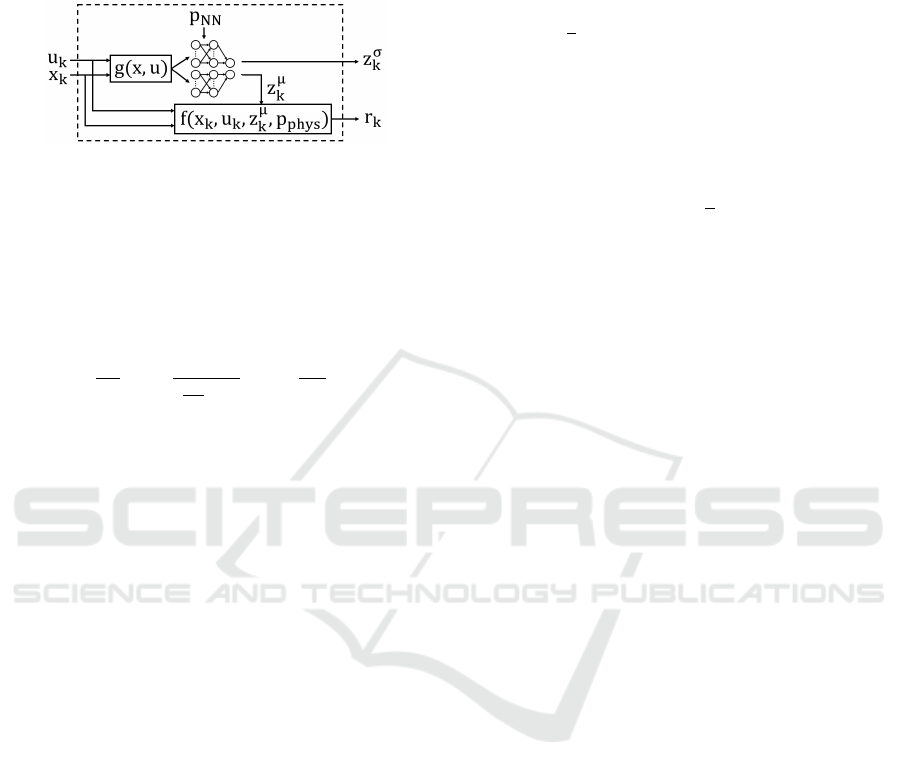
of course. The PANN is graphically depicted in Fig. 1.
Figure 1: The explicit PANN model structure with time
integrator.
To fit the model to the measurement data we mini-
mize the error between the model-predicted state
ˆx
and
the measured state x:
minimize
p
1
N
N
∑
k=1
(x
k
− ˆx
k
)
2
(5)
The advantage of training an explicit ODE (or PANN)
using time-integration is that, when states are predicted
forward in time multiple steps, so-called N-step ahead
prediction (De Groote et al., 2021a), the optimization
becomes less sensitive to measurement noise.
Another way of formulating the dynamics of the
PANN is the implicit ODE format: a function such as
a force or torque balance that should equal zero:
0 = f (x
k
, u
k
, z
k
, p). (6)
When the measured states
x
and control inputs
u
are
entered into this function, the parameters
p
can be
optimized to minimize its left hand side, i.e., residual
r
k
at each time step k:
minimize
p
1
N
N
∑
k=1
r
2
k
. (7)
Note that this way of fitting the model does not
require a time-integrator. However, it is more sensi-
tive to noise than N-step ahead prediction fitting, also
because the measurement
x
needs to contain higher
derivatives (e.g., acceleration), which are harder to
measure (or estimate from measurements) accurately
and will typically exhibit greater noise levels.
2.2.2 Probabilistic Physics-Augmented Neural
Networks
In this section we will integrate the concepts of a PNN
and a PANN to find the novel probabilistic physics-
augmented neural network (PPANN).
A PNN is a neural network architecture that re-
places a deterministic mapping of its input
g
(
x, u
) to
output
z
with a parameterized probability distribution
of
z
. In our case we choose a normal distribution
which means that the PNN outputs are the mean
z
µ
and
standard deviation z
σ
, see Fig. 2.
Figure 2: The PNN neural network architecture.
We want to train a PNN that matches the mea-
sured data and its variability as accurately as possible.
This means we want to maximize the likelihood of the
model predictions explaining the observed data. This
can be achieved using a negative log likelihood (NLL)
(Lakshminarayanan et al., 2017) cost function to train
the parameters
p
NN
in the PNN. We assume that the
observed variability can be captured in a Gaussian
(i.e., normal) distribution, so we can use the following
expression for the NLL cost:
minimize
p
NN
1
2N
N
∑
k=1
(z
k
− z
µ
k
)
2
z
σ2
k
+ log((z
σ
k
)
2
)
, (8)
ICINCO 2023 - 20th International Conference on Informatics in Control, Automation and Robotics
154
where
z
k
denotes the measured output that is captured
by the PNN.
Interconnecting the PNN and the PANN is rather
straightforward and depicted in Fig. 3. However, we
Figure 3: The implicit PPANN model structure.
want to predict
z
µ
and
z
σ
using the data we measure
on the complete system: we do not have a direct mea-
surement
z
k
. To resolve this, we must propagate
z
µ
and
z
σ
of the neural network to the PPANN residual
output
r
, which results in the following modified NLL
optimization to train PPANN’s:
minimize
p
1
2N
N
∑
k=1
r
2
k
(
dr
k
dz
µ
k
z
σ
k
)
2
+ log(
dr
k
dz
µ
k
z
σ
k
)
2
)
. (9)
This cost function can easily be extended when multi-
ple PNN are inserted into the PANN.
There are however two drawbacks related to train-
ing the PPANN using the cost described in Eq. 9. The
first is related to our earlier remark that with the im-
plicit formulation we cannot use the N-step ahead pre-
diction for training. Secondly, there is a risk that the
optimization gets stuck in a local optimum where the
mean model
z
µ
fits poorly which is compensated with a
large
z
σ
to explain the measured data. Yet, although we
can easily propagate
z
µ
N steps ahead in time through
the explicit ODE, the same cannot be done as straight-
forwardly for
z
σ
. Therefore, to ensure we get an accu-
rate mean prediction and limit the model bias, but in
the same time still allow for the probabilistic extension,
we split the training approach in two phases:
1.
Train the mean neural network
z
µ
of the PPANN
using N-step ahead prediction with a MSE cost
function. Note that the MSE cost is equivalent to
assuming
z
σ
is constant, therefore
z
σ
will not run
away to compensate for a poor z
µ
fit.
2.
Fix
z
µ
and train the sigma network
z
σ
of the
PPANN using the NLL cost from Eq. 9.
2.3 Optimal Control
The formulation of a generic discrete-time optimal
control problem is:
minimize
x,u
J
OCP
(x, u) (10a)
s. t. x
k+1
= f (x
k
, u
k
, z
k
, p)∆t + x
k
, ∀ k ∈ [1, N]
(10b)
h ≤ h(x, u) ≤
¯
h. (10c)
In the above, Eq. 10a denotes the cost function which
can depend on states and/or inputs, Eq. 10b imple-
ments the model dynamics using a multiple shooting
approach, see (Bock and Plitt, 1984) for more details.
Finally, Eq. 10c implements the desired constraints
h
(e.g., initial condition, input and path constraints)
lower and upper bounded by h and
¯
h.
The resulting discrete-time optimization problem
is a large-but-sparse non-linear program (NLP), con-
taining continuous optimization variables. We will
use the CasADi framework (Andersson et al., 2019)
to efficiently set-up the problem, which employs algo-
rithmic differentiation, and we will solve it using the
gradient-based interior point optimization algorithm
IPOPT (Wächter and Biegler, 2006).
2.4 Robust Optimal Control Using
Probabilistic Physics-Augmented
Neural Networks
In this section, we will describe the extension of the
optimal control problem of Section 2.3 to a robust
OCP leveraging the dynamics captured in the PPANN.
As shown in the previous section, we can embed
state-space model dynamics, for example of a PANN
or PPANN, in the optimization problem. Ideally one
would also add the PPANN’s description of uncertainty
to the OCP to formulate constraints with respect to
the uncertain dynamics. However, since there is no
explicit formulation for the propagation of uncertainty
in time this can not be done. Instead, we will compute
the uncertainty in time by, at each time step
k
, Monte
Carlo sampling
j
times the distribution fitted by the
PPANN to get
z
( j)
k
and performing the time integration
of the dynamics for each k and j as:
ˆx
( j)
k+1
= f (x
k
, u
k
, z
( j)
k
, p)∆t + x
k
, (11)
If we stack these varying state propagations into
ˆx
MC
, we can once again compute a standard deviation
σ
(
ˆx
MC
). This can then be used to compute the 3
σ
upper and lower bound of the states. These bounds
can be used to add a robustness safety margin to the
state constraint (Eq. 10c) after which the OCP can be
solved again with the updated constraints.
Probabilistic Physics-Augmented Neural Networks for Robust Control Applied to a Slider-Crank System
155
3 EXPERIMENTAL RESULTS
In this section, we explain the approach proposed in
Section 2 applied to a lab-scale slider-crank mecha-
nism designed to mimic weaving looms and similar
industrial systems. First, we introduce the setup and
generate a dataset. Secondly, we train the PPANN on
the dataset and lastly, we solve a robust optimal control
problem and validate its performance on the setup.
3.1 Slider-Crank Mechanism
We consider the control of a slider-crank mechanism,
which is shown schematically in Fig. 4. The mech-
anism converts a rotary motion
θ ∈ R
into a linear
displacement
x
slider
∈ R
using input torque
τ ∈ R
- a
motion conversion that often emerges in industrial ap-
plications, such as weaving looms, compressors and
piston engines. The system contains non-linearities
and has dead points. The state vector of the system is
defined as
x
=
θ ω
T
, with angular velocity
ω
=
˙
θ
and input u = τ.
The slider displacement
x
slider
is calculated using
a straightforward kinematic function that is assumed
to be known:
x
slider
=
l
1
cos
(
θ
) +
l
2
cos
(
φ
) +
l
1
− l
2
,
employing geometric constraint
φ
=
sin
−1
(
l
1
l
2
sin
(
θ
)).
The crank-arm length
l
1
= 0.05 m and connecting-rod
length is set to
l
2
= 0.3 m respectively. Furthermore,
we have approximate values for inertia (
J
m
= 3
e
−3
kg/m
2
), damping (
B
m
= 0.1 Ns/rad) and the stiffness
(K
m
= 1 N/rad).
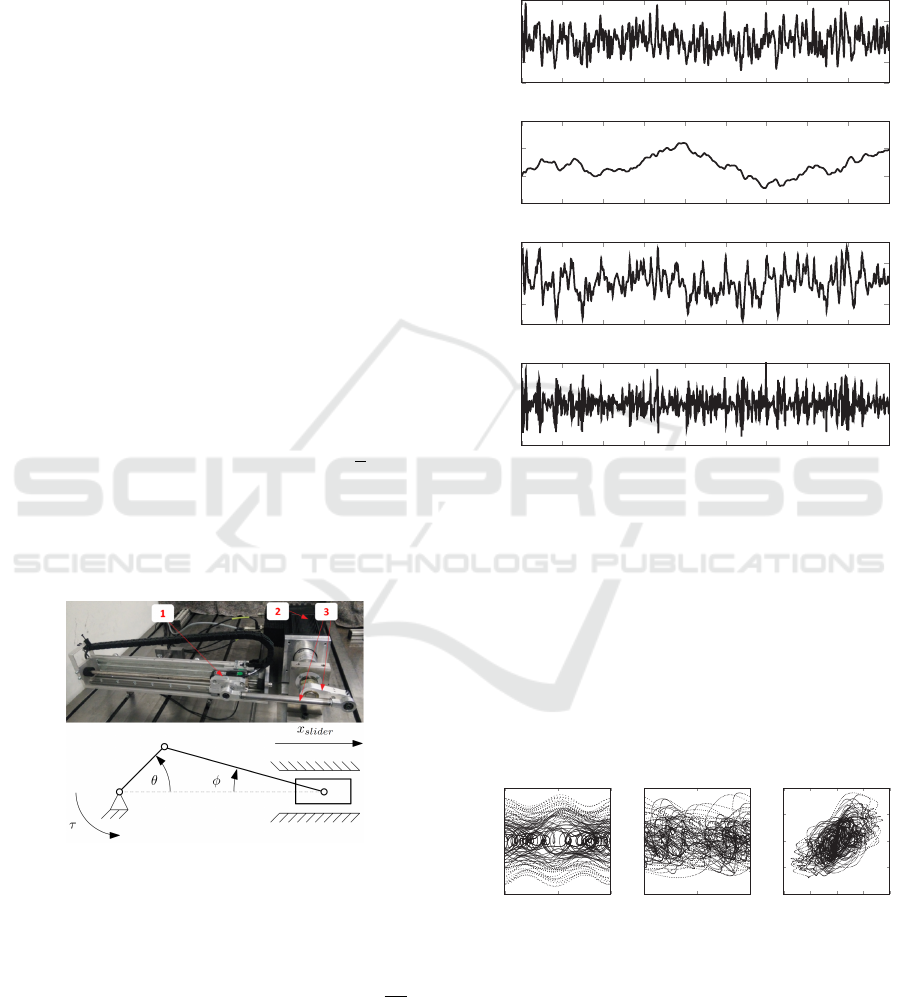
Figure 4: Picture and schematic overview of the slider-crank
system consisting of: (1) linear slider, (2) rotary motor and
(3) the crank and connecting rod.
3.2 Dataset Generation
We sample the measurements at 500 Hz (∆
t
=
1
500
s)
and generate 90 seconds of data. In order to excite
the system, we have generated a semi-random input
torque (which is filtered by a low-pass filter), as shown
in the top plot of Fig. 5. Furthermore, to increase
the variability of the system and better validate our
method, we have applied a white-noise input force on
the slider with a peak amplitude of 30 N (which acts as
a non-measured disturbance). Applying these inputs
results in the measured state evolution as shown in
Fig. 5.
0 10 20 30 40
50 60
70 80 90
−10
−5
0
5
10
Time [s]
Torque [Nm]
0 10 20 30 40
50 60
70 80 90
−50
0
50
100
Time [s]
Angle [rad]
0 10 20 30 40
50 60
70 80 90
−100
−50
0
50
100
Time [s]
Angular velocity [rad/s]
0 10 20 30 40
50 60
70 80 90
−2,500
0
2,500
Time [s]
Angular acc. [rad/s
2
]
Figure 5: The input torque considered to excite the physical
system and the measured states of the physical model after
excitation with the given input torque.
In Fig. 6, the coverage maps are shown for the
entire dataset. It can be seen that the maps are quite
densely populated, i.e., the training data is quite rich
(within the considered bounds that are chosen large
enough to ensure that the OCP solution falls within
them), which is required for an accurate fit of the
PPANN. Note that the angles are plotted between 0
and 2
π
, since it is assumed that the system is periodic
over each rotation.
0
π
2π
−100
−50
0
50
100
Angle [rad]
Velocity [rad/s]
0
π
2π
−10
−5
0
5
10
Angle [rad]
Torque [Nm]
−100
−50
0
50
100
−10
−5
0
5
10
Velocity [rad/s]
Torque [Nm]
Figure 6: The coverage maps of the dataset.
3.3 PPANN Design and Training
In this section, we will discuss the architecture of the
PPANN model for the considered slider-crank system
and then execute the training, using the dataset created
in the previous section.
ICINCO 2023 - 20th International Conference on Informatics in Control, Automation and Robotics
156

3.3.1 Parameterization of the Considered
PPANN
The state propagation function of the considered
PPANN (explicit form) is given as follows:
ˆ
˙x
k
= f (x
k
, u
k
, z
k
, p) =
ω
k
ˆ
α(x
k
, u
k
, z
k
, p)
. (12)
We exploit the fact that for the given system,
˙
θ
=
ω
, i.e.,
the derivative of the first state is equal to the second
state. Therefore, it is not needed to have the PPANN
predict both states, we will instead let it predict the
derivative of the second state, i.e.,
ˆ
α
=
ˆ
˙
ω
. As a result,
the relation between
θ
and
ω
remains maintained even
in case of an imperfect model.
In the above, function
g
denotes the mapping from
state and input to the inputs of the PPANN. Instead
of using the states of the slider crank system (and
its input) directly as input, i.e.,
θ ω τ
T
∈ R
3
,
we use:
g
(
x, u
) =
sin(θ) cos(θ) ω τ
T
∈ R
4
,
thereby constraining the input space of the neural net-
works. It is equivalent to imposing a 2
π
periodicity
over the angle θ.
In order to derive function
ˆ
α
, we first employ a
simple and generic 2
nd
order linear system:
ˆ
α
lin
(x
k
, u
k
, p
phys
) =
τ
k
− B
m
ω
k
− K
m
θ
mod
k
J
m
. (13)
In the above,
p
phys
=
J
m
B
m
K
m
, and
θ
mod
is
equal to
θ
modulo 2
π
. Second, the above linear model
is augmented to a PPANN (yielding
ˆ
α
from Eq. 12),
by employing three neural networks z
µJ
, z
µB
and z
µK
:
ˆ
α(x
k
, u
k
, z
k
, p) =
τ
k
− B
m
(1 + z
µB
k
)ω
k
− K
m
(1 + z
µK
k
)θ
mod
k
J
m
(1 + z
µJ
k
)
.
(14)
In the above, three separate neural networks are
present, the mean inertia network output
z
µJ
, mean
damping network
z
µB
and mean stiffness network
z
µK
,
which allow the additional (non-)linear dynamics to
be modelled as well. Note that networks
z
µJ
and
z
µK
are parameterized to be a function of only (the trans-
formed)
θ
, i.e.,
sin(θ) cos(θ)
T
, thereby allowing
for a position-dependent inertia and stiffness profile.
z
µB
is parameterized to be a function of both (the trans-
formed)
θ
and
ω
, i.e.,
sin(θ) cos(θ) ω
T
, allow-
ing not only position dependency to be accounted for,
but also speed-dependent effects (e.g., Stribeck fric-
tion).
For the
z
µ
networks of the PPANN, each is con-
structed using a single hidden layer of 100 neurons,
which is shown to be able to to approximate any con-
tinuous function (Hornik et al., 1989). We have used a
linear activation function for the final layer (the output
layer), and
tanh
activations for the previous layers. For
the z
σ
networks, each of the three uses 10 neurons.
3.3.2 Training the PPANN
Now that the architecture has been defined, we will use
the dataset obtained in Section 3.2 to train the neural
networks. We use the first 87 seconds for training, and
the last 3 seconds for validation. A learning rate of
5
e
−3
is used for the Adam optimizer (Kingma and Ba,
2014). As described in Section 2.2.2, we first train the
z
µ
part of the PPANN (using cost function given by Eq.
5 and N-step ahead training with a prediction horizon
of
N
s
= 10) and afterwards, the
z
σ
part of the PPANN
is trained (employing Eq. 9).
The resulting 3-D maps for each of the six net-
works trained are shown in Fig. 7. We make the fol-
lowing observations:
•
For the inertia maps (top row), oscillatory behavior
can be seen for the
z
µJ
network: the inertia varies
as a function of the angle, due to the kinematic rela-
tion between motor rotation and slider translation.
When the crank and connecting rod are parallel
to each other (
θ
=
{
0
, π,
2
π}
), the perceived in-
ertia is the lowest (dead points), and highest at
(
θ
=
{
1
2
π,
1
1
2
π}
). The uncertainty is the highest
when the crank and rocker are in the upper posi-
tion (between 0 and
π
), but compared to the other
networks it is small.
•
For the damping maps (middle row), again and
varying behavior can be seen as a function of angle
and velocity. The damping seems to be the highest
around low speeds, when the crank and rod are
approximately perpendicular (e.g., due to stick-slip
friction present on the slider), and again increases
for higher speeds (viscous friction in the rotary
motor).
•
For the spring maps (bottom row), it can be seen
that the
µ
network oscillates around -1. Since this
thus almost cancels out the stiffness related term
(
K
m
(1 +
z
µK
k
)
θ
mod
k
), in Eq. 14, the contribution of
stiffness to the total torque is thus rather limited.
The remaining part can for example be attributed to
effects such as cogging and flexibility of the setup.
The uncertainty is the highest when the crank and
rocker are in the upper position (between 0 and
π
).
In Fig. 8, the output of the
z
µ
part of the trained
PPANN (deterministic part) is shown for the entire
validation dataset. It can be seen that a good match is
obtained between the validation data and the prediction
of the neural network, even for longer prediction hori-
zons (in this case: 3 seconds). The observed mismatch
can be attributed to variability in the behavior, such as
(non-measured) white noise force excited by the linear
Probabilistic Physics-Augmented Neural Networks for Robust Control Applied to a Slider-Crank System
157
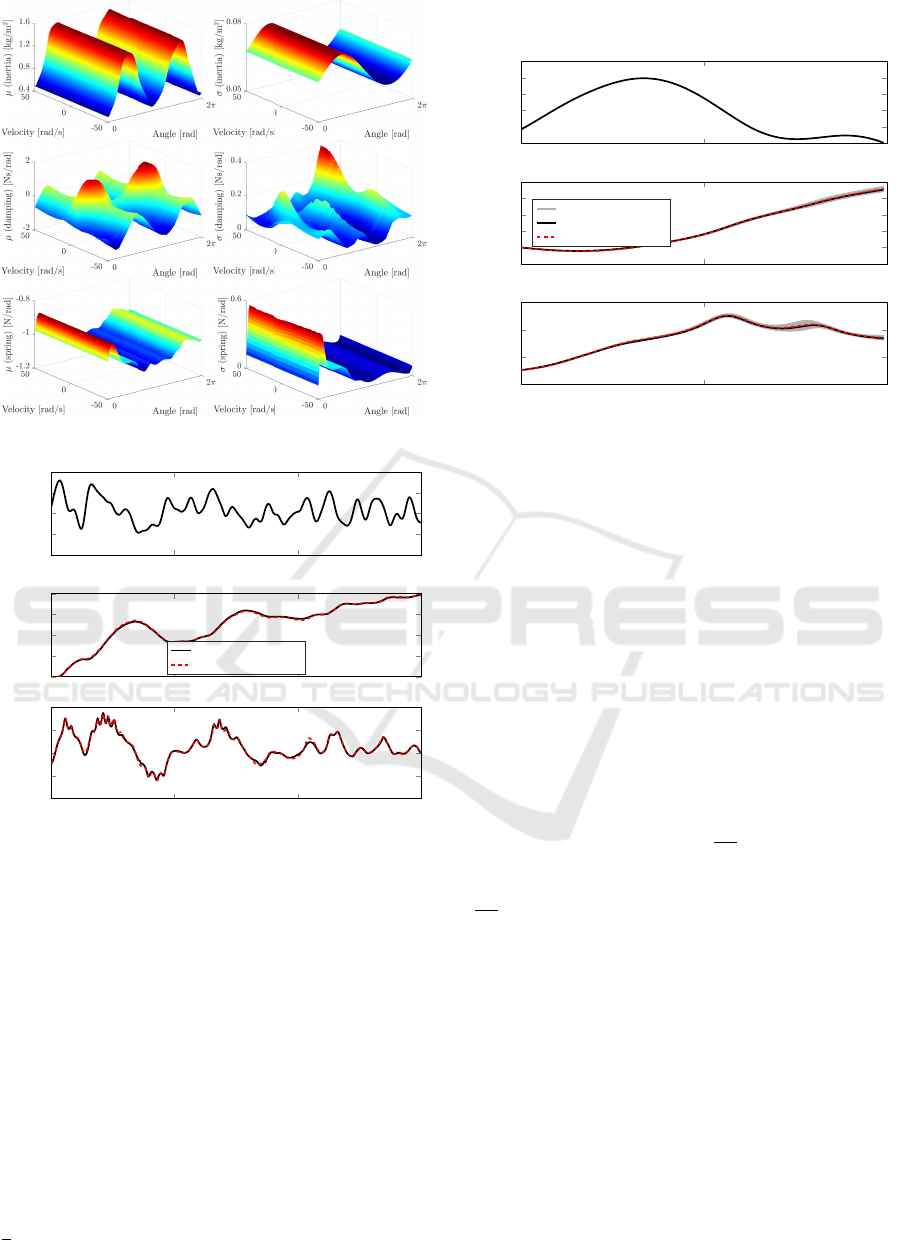
Figure 7: Resulting 3-D maps for the µ and σ networks.
0 1 2 3
−10
−5
0
5
10
Time [s]
Torque [Nm]
0 1 2 3
0
10
20
30
40
Time [s]
Angle [rad]
Validation data
Forward simulation (µ)
0 1 2 3
−100
−50
0
50
100
Time [s]
Angular velocity [rad/s]
Figure 8: The results of the trained PPANN demonstrated on
the validation dataset.
motor acting on the slider, as well as backlash in the
setup.
Next, we demonstrate the uncertainty part captured
by the trained PPANN, by including the (stochastic)
z
σ
nets as well in the simulation. To do so, we have
employed Monte Carlo sampling (see Eq. 11); sam-
pling the trained model 100 times (yielding
ˆx
( j)
with
j
= 1
, . . . ,
100). In this way we obtain a varying state
propagation, on which we can compute the standard
deviation at each time step, similar to as discussed in
Section 2.4, allowing to compute the 3
σ
upper and
lower bounds. The results are shown in Fig. 9. We
have shown the original validation data and forward
simulation of the deterministic part (
µ
), as well as the
x
and
¯x
bounds: forming a state and time-propagation
dependent uncertainty band around the deterministic
part.
0 0.1 0.2
0
2
4
6
8
10
Time [s]
Torque [Nm]
0 0.1 0.2
−2
0
2
4
6
8
Time [s]
Angle [rad]
3σ bounds
Validation data
Forward simulation (µ)
0 0.1 0.2
−50
0
50
100
Time [s]
Angular velocity [rad/s]
Figure 9: Uncertainty simulation on part of validation
dataset.
3.4 Optimal Control and Results
In this section, we will solve a typical control case for
such an oscillating mechanism using the robust OCP
approach described in Sections 2.3 and 2.4. We use
the trained PPANN, and validate the results by running
it multiple times on the physical setup to verify if the
solution indeed performs robustly.
3.4.1 Problem Formulation
First, we will solve an optimal control problem that
minimizes the input torque, while meeting several
constraints on the states. We set up the optimal con-
trol problem denoted in Eq. 10, with cost function
J
OCP
=
∑
N
k=1
u
2
k
+ 1
e
−4
∑
N−1
k=1
(
∆u
k
T
s
)
2
, where ∆ denotes
the discrete derivative operator. We set the horizon
length
N
to 150 samples, and use a sampling time of
1
500
s. Additionally, the following motion constraints
are taken into account:
x
slider
k
≥ 0.08, k ∈
{
50, 100
}
,
θ
1
= π, ω
1
= 0,
θ
N
= 3π, ω
N
= 0.
(15)
The first constraint involves the height (0.08 m) and
timing (samples 50 and 100) of the displacement of
the slider. The second and third constraint denote the
initial and final angular conditions.
3.4.2 Step 1: Solve non-Robust OCP (Without
Uncertainty)
Using the model trained in the previous section, we
have solved the OCP. The results are shown in Fig. 10.
ICINCO 2023 - 20th International Conference on Informatics in Control, Automation and Robotics
158
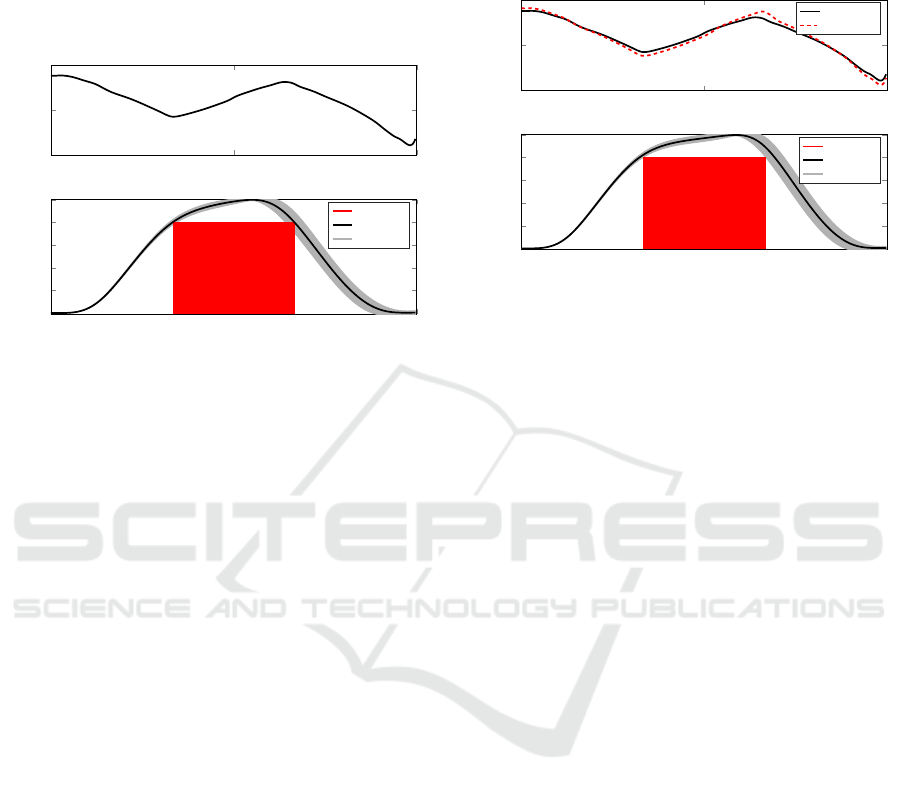
The top plot shows the calculated input torque, and the
bottom plot shows the slider displacement calculated
using the mean PPANN, as well as the given constraint
surface. It can be seen that the nominal OCP result
(calculated on the mean PPANN) satisfies the given
constraints.
0
0.15
0.3
−6
0
6
Time [s]
Torque [Nm]
0
0.15
0.3
0
0.02
0.04
0.06
0.08
0.1
Time [s]
Displacement [m]
Constraint
OCP (µ)
3σ bounds
Figure 10: OCP results (non-robust case) solved using the
mean PPANN. The 3
σ
bounds are computed and shown
afterwards.
3.4.3
Step 2: Determine Uncertainty (Given OCP
Solution)
Next, the 3
σ
standard deviation on the slider dis-
placement, denoted by 3
σ
(
x
slider, MC
k
), is calculated
by Monte Carlo sampling the PPANN with variability
(using 100 trajectories, see Eq. 11). In Fig. 10, it can
be seen that if uncertainty is accounted for, satisfaction
of the constraints is not guaranteed.
3.4.4 Step 3: Solve Robust OCP (Accounting for
Uncertainty)
In this step, the goal is to solve a robust OCP, i.e., an
OCP which guarantees constraint satisfaction given
the modelled uncertainty. To do so, we update the
constraints on the slider displacement (see Eq. 15) to:
x
slider
k
− 3σ(x
slider, MC
k
) ≥ 0.08, k ∈
{
50, 100
}
. (16)
Note that only the lower bound
−
3
σ
case is consid-
ered, since it is the only active constraint. The results
are shown in Fig. 11. The top plot shows the (previ-
ously computed) non-robust and robust input torque,
which does account for the uncertainty. The bottom
plot shows the resulting slider displacement calculated
using the robust OCP and its 3
σ
bounds, again com-
puted using Monte Carlo simulation. In the figure, it
can be seen that the updated result is indeed feasible,
given the (re-computed) uncertainty. Note that for this
example we were able to obtain a robust solution by
solving the OCP twice (once for the nominal case and
once for the case accounting for uncertainty). Note
that multiple iterations could be considered in case
the uncertainty would change more between operating
regions.
0
0.15
0.3
−6
0
6
Time [s]
Torque [Nm]
Non-robust
Robust
0
0.15
0.3
0
0.02
0.04
0.06
0.08
0.1
Time [s]
Displacement [m]
Constraint
OCP (µ)
3σ bounds
Figure 11: OCP results (robust case), accounting for uncer-
tainty.
3.5 Implementation on Physical Setup
In this section, we will implement the OCP results
determined in the previous section on the physical
setup, to validate the approach presented in this paper.
We have applied both the input signals computed in
the previous section (non-robust and robust case) 100
times each. In Fig. 12 the results are shown: the con-
straint box, the slider displacement computed by the
OCP in simulation, the mean displacement measured
on the experimental setup and the corresponding 3
σ
bounds (calculated on the experimental data). The top
plot shows the result for the non-robust case. Sim-
ilar to as shown in simulation, if uncertainty is not
accounted for, the constraints can be violated. The
bottom plot shows the robust case, where uncertainty
is accounted for. In this case, it can be seen that the
constraints are indeed satisfied. Note that however the
3
σ
band seems to be smaller for the experimental case
compared to the simulation case (see Fig. 11). This
could be attributed to for example imperfections (bias)
in the training of the
µ
network, or reduced heating up
of the setup (thereby changing the friction), compared
to the longer duration training data.
4 CONCLUSIONS
In this work we demonstrated an approach to augment
a physical model with probabilistic neural networks
to capture unmodelled effects. It predicts not only
the mean system behavior but also its variance. We
coined this novel model structure PPANN. Prediction
of the mean and variance was exploited using a robust
optimal control approach, where the predicted vari-
Probabilistic Physics-Augmented Neural Networks for Robust Control Applied to a Slider-Crank System
159
0
0.15
0.3
0
0.02
0.04
0.06
0.08
0.1
Time [s]
Displacement [m]
Non-robust
Constraint
OCP (exp.) (µ)
OCP (sim.) (µ)
3σ bounds (exp.)
0
0.15
0.3
0
0.02
0.04
0.06
0.08
0.1
Time [s]
Displacement [m]
Robust
Constraint
OCP (exp.) (µ)
OCP (sim.) (µ)
3σ bounds (exp.)
Figure 12: Results of the experimental validation, for both
the non-robust and robust case.
ability was included in the control optimization con-
straints to ensure the necessary robustness. Validation
of the PPANN model and the robust optimal control
approach was performed on a slider-crank setup mim-
icking an industrial weaving loom. It was shown that
the PPANN captured the mean system behavior, but
also its variability, as intended. Furthermore, the ro-
bust controller was shown to have (near-)minimal but
sufficient robustness. The constraints were satisfied
whilst achieving high performance thereby validating
the approach on a real system.
Future work will look into the following topics:
•
Research how to meaningfully propagate uncer-
tainty in time and train both model mean and vari-
ance using N-step ahead predictions. This will
also allow us to directly include variability in the
robust OCP and remove the need for iterative OCP
solving.
•
Train the PPANN in a single shot, as opposed to
the current two-phase approach, whilst finding the
minimal uncertainty.
•
Research into training physical and neural parame-
ters at the same time, whilst maximizing the con-
tribution of physical parameters (which have the
advantage of extrapolation beyond the trained re-
gion).
•
Add uncertainty to the physical parameters in case
there is reason to assume these are probabilistic.
•
Applying the current (off-line) optimal control
problem in an (on-line) model-predictive control
setting.
ACKNOWLEDGMENTS
This work has been carried out within the framework
of Flanders Make’s IRVA project HAIEM (Hybrid AI
for Estimation in Mechatronics), funded by Flanders
Make and the AI Research Program of the Flemish
Government. Flanders Make is the Flemish strategic
research centre for the manufacturing industry.
REFERENCES
Abadi, M., Agarwal, A., Barham, P., Brevdo, E., Chen, Z.,
Citro, C., Corrado, G. S., Davis, A., Dean, J., Devin,
M., Ghemawat, S., Goodfellow, I., Harp, A., Irving, G.,
Isard, M., Jia, Y., Jozefowicz, R., Kaiser, L., Kudlur,
M., Levenberg, J., Mané, D., Monga, R., Moore, S.,
Murray, D., Olah, C., Schuster, M., Shlens, J., Steiner,
B., Sutskever, I., Talwar, K., Tucker, P., Vanhoucke,
V., Vasudevan, V., Viégas, F., Vinyals, O., Warden,
P., Wattenberg, M., Wicke, M., Yu, Y., and Zheng, X.
(2015). TensorFlow: Large-scale machine learning
on heterogeneous systems. Software available from
tensorflow.org.
Andersson, J. A. E., Gillis, J., Horn, G., Rawlings, J. B.,
and Diehl, M. (2019). CasADi – A software frame-
work for nonlinear optimization and optimal control.
Mathematical Programming Computation, 11(1):1–36.
Beintema, G., Toth, R., and Schoukens, M. (2021). Non-
linear state-space identification using deep encoder
networks. In Learning for dynamics and control, pages
241–250. PMLR.
Bishop, C. (1994). Mixture density networks. Workingpaper,
Aston University.
Bock, H. G. and Plitt, K.-J. (1984). A multiple shooting al-
gorithm for direct solution of optimal control problems.
IFAC Proceedings Volumes, 17(2):1603–1608.
Chen, R. T. Q., Rubanova, Y., Bettencourt, J., and Duve-
naud, D. (2019). Neural ordinary differential equations.
arXiv preprint arXiv:1806.07366.
De Groote, W., Kikken, E., Hostens, E., Van Hoecke, S.,
and Crevecoeur, G. (2021a). Neural network aug-
mented physics models for systems with partially un-
known dynamics: application to slider–crank mech-
anism. IEEE/ASME Transactions on Mechatronics,
27(1):103–114.
De Groote, W., Van Hoecke, S., and Crevecoeur, G. (2021b).
Physics-based neural network models for prediction
of cam-follower dynamics beyond nominal opera-
tions. IEEE/ASME Transactions on Mechatronics,
27(4):2345–2355.
Forbes, M. G., Patwardhan, R. S., Hamadah, H., and
Gopaluni, R. B. (2015). Model predictive control
in industry: Challenges and opportunities. IFAC-
PapersOnLine, 48(8):531–538.
Forgione, M. and Piga., D. (2020). Model structures and
fitting criteria for system identification with neural
networks. 2020 IEEE 14th International Conference
ICINCO 2023 - 20th International Conference on Informatics in Control, Automation and Robotics
160

on Application of Information and Communication
Technologies (AICT), pages 1–6. IEEE, 2020.
Gal, Y. and Ghahramani, Z. (2016). Dropout as a bayesian ap-
proximation: Representing model uncertainty in deep
learning.
Goan, E. and Fookes, C. (2020). Bayesian neural networks:
An introduction and survey. In Case Studies in Ap-
plied Bayesian Data Science, pages 45–87. Springer
International Publishing.
Hornik, K., Stinchcombe, M., and White, H. (1989). Multi-
layer feedforward networks are universal approxima-
tors. Neural networks, 2(5):359–366.
Karniadakis, G., Kevrekidis, Y., Lu, L., Perdikaris, P., Wang,
S., and Yang, L. (2021). Physics-informed machine
learning. Nature Reviews Physics, 3:422–440.
Kikken, E., Depraetere, B., and Willems, J. (2022). Bridging
dynamic neural networks and optimal control. In 41st
Benelux Meeting on Systems and Control, Brussels,
Belgium.
Kingma, D. P. and Ba, J. (2014). Adam: A
method for stochastic optimization. arXiv preprint
arXiv:1412.6980.
Lakshminarayanan, B., Pritzel, A., and Blundell, C. (2017).
Simple and scalable predictive uncertainty estimation
using deep ensembles.
Ljung, L. (1998). System Identification, pages 163–173.
Birkhäuser Boston, Boston, MA.
Morimoto, M., Fukami, K., Maulik, R., Vinuesa, R., and
Fukagata, K. (2022). Assessments of epistemic uncer-
tainty using gaussian stochastic weight averaging for
fluid-flow regression. Physica D: Nonlinear Phenom-
ena, 440:133454.
Paszke, A., Gross, S., Massa, F., Lerer, A., Bradbury, J.,
Chanan, G., Killeen, T., Lin, Z., Gimelshein, N.,
Antiga, L., Desmaison, A., Kopf, A., Yang, E., DeVito,
Z., Raison, M., Tejani, A., Chilamkurthy, S., Steiner,
B., Fang, L., Bai, J., and Chintala, S. (2019). Pytorch:
An imperative style, high-performance deep learning
library. In Advances in Neural Information Processing
Systems 32, pages 8024–8035. Curran Associates, Inc.
Raissi, M., Perdikaris, P., and Karniadakis, G. (2019).
Physics-informed neural networks: A deep learning
framework for solving forward and inverse problems
involving nonlinear partial differential equations. Jour-
nal of Computational Physics, 378:686–707.
Salzmann, T., Kaufmann, E., Pavone, M., Scaramuzza, D.,
and Ryll, M. (2022). Neural-mpc: Deep learning model
predictive control for quadrotors and agile robotic plat-
forms. arXiv preprint arXiv:2203.07747.
Schiassi, E., Furfaro, R., Leake, C., De Florio, M., John-
ston, H., and Mortari, D. (2021). Extreme theory of
functional connections: A fast physics-informed neu-
ral network method for solving ordinary and partial
differential equations. Neurocomputing, 457:334–356.
Schoukens, J. and Ljung, L. (2019). Nonlinear system iden-
tification: A user-oriented road map. IEEE Control
Systems Magazine, 39(6):28–99.
Seitzer, M., Tavakoli, A., Antic, D., and Martius, G. (2022).
On the pitfalls of heteroscedastic uncertainty estima-
tion with probabilistic neural networks. arXiv preprint
arXiv:2203.09168.
Spielberg, N. A., Brown, M., and Gerdes, J. C. (2022). Neu-
ral network model predictive motion control applied to
automated driving with unknown friction. IEEE Trans-
actions on Control Systems Technology, 30(5):1934–
1945.
Streit, R. L. and Luginbuhl, T. E. (1994). Maximum likeli-
hood training of probabilistic neural networks. IEEE
Transactions on neural networks, 5(5):764–783.
Wächter, A. and Biegler, L. T. (2006). On the implemen-
tation of an interior-point filter line-search algorithm
for large-scale nonlinear programming. Mathematical
programming, 106(1):25:57.
Willems, J., Hostens, E., Depraetere, B., Steinhauser, A.,
and Swevers, J. (2018). Learning control in practice:
Novel paradigms for industrial applications. In IEEE
Conference on Control Technology and Applications
(CCTA).
Yang, L., Meng, X., and Karniadakis, G. E. (2021). B-pinns:
Bayesian physics-informed neural networks for for-
ward and inverse pde problems with noisy data. Jour-
nal of Computational Physics, 425:109913.
Probabilistic Physics-Augmented Neural Networks for Robust Control Applied to a Slider-Crank System
161
