
Mapping, Localization and Navigation for an Assistive Mobile Robot
in a Robot-Inclusive Space
Prabhu R. Naraharisetti
a
, Michael A. Saliba
b
and Simon G. Fabri
c
Faculty of Engineering, University of Malta, Msida, Malta
Keywords: Observability, Accessibility, Robot-Inclusive Space, Vision-Based SLAM, LiDAR-Based SLAM, GMapping,
Hector SLAM, Mapping, Path Planning, ROS Navigation Stack.
Abstract: Over the years, the major advancements in the field of robotics have been enjoyed more by the mainstream
population, e.g. in industrial and office settings, than by special groups of people such as the elderly or persons
with impairments. Despite the advancement in various technological aspects such as artificial intelligence,
robot mechanics, and sensors, domestic service robots are still far away from achieving autonomous
functioning. One of the main reasons for this is the complex nature of the environment and the dynamic nature
of the people living inside it. In our laboratory, we have started to address this issue with our minimal degrees
of freedom MARIS robot, by upgrading it from a teleoperated robot to an autonomous robot that can operate
in a robot-inclusive space that is purposely designed to adopt algorithms that are not very computationally
intensive, and hardware architecture that is relatively simple. This paper discusses the implementation of
suitable SLAM algorithms, to select the best method for mapping and localization of the MARIS robot in this
robot-inclusive environment. The emphasis is on the development of low-complexity algorithms that can map
the environment with lesser errors. The paper also discusses the 3D mapping, and the ROS based navigation
stack implemented on the MARIS robot, using just a LiDAR, a Raspberry Pi processor, and DC motors with
encoders as main hardware architecture, so as to keep low costs.
1 INTRODUCTION
In recent years, service robots have found their way
into public environments, such as in hospitals to
deliver food and medicines to patients in quarantine
(e.g. UBTECH robot) (Seidita et al., 2021), or in high
end restaurants to deliver food to the customers while
attaining a competitive advantage over their rivals
(e.g. SERVI robot (SERVI robot, 2023)). But perhaps
a more pressing requirement for these service robots
is in home settings, to serve the elderly and impaired
as their population is increasing globally. Some
companies have put their efforts to bring service
robots into home spaces (Polaris-Market-Research,
2023), but these robots are not very effective in
performing the daily household tasks to serve the
elderly and impaired satisfactorily. A primary reason
for this is the complex nature of the environment
including the dynamic nature of the people living in
a
https://orcid.org/0009-0007-0117-4888
b
https://orcid.org/0000-0002-1985-3076
c
https://orcid.org/0000-0002-6546-4362
it, that typically demand the use of highly complex
robot technologies (Sosa et al., 2018). High end
complex robots such as ASIMO (ASIMO robot,
2023) and SPOT (Boston Dynamics - Spot robot,
2023) may in principle be capable of performing
certain demanding household tasks, but these robots
would not be widely affordable. Thus, a minimally
complex robot that still has the functionalities to
perform daily household tasks, in particular to
address the specific needs of the elderly, could be
applied to operate in a robot friendly home
environment called a robot-inclusive space (RIS)
(Sosa et al., 2018). Prior to the present work, in the
first part of our Mobile Assistive Robot in an Inclusive
Space (MARIS) project, a survey was conducted to
understand the common needs of the elderly and
impaired (Aquilina et al., 2019). In subsequent work,
ten representative tasks were extracted to encapsulate
these needs, namely: 1) preparing or bringing
172
Naraharisetti, P., Saliba, M. and Fabri, S.
Mapping, Localization and Navigation for an Assistive Mobile Robot in a Robot-Inclusive Space.
DOI: 10.5220/0012172900003543
In Proceedings of the 20th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2023) - Volume 1, pages 172-179
ISBN: 978-989-758-670-5; ISSN: 2184-2809
Copyright © 2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)

medication; 2) heating a meal in a microwave oven;
3) operating a telephone; 4) preparing a small snack;
5) getting items from a refrigerator or cupboard;
6) taking out the garbage; 7) preparing tea or coffee;
8) arranging vegetables for chopping and/or cooking;
9) drying and putting away dishes; and 10) setting and
clearing a table (Naraharisetti et al., 2022). The RIS
principles such as observability and accessibility will
be considered in designing home environments that
are suitable for mapping and navigation by the
MARIS robot to perform the representative set of
tasks. The objective of this research is to conduct a set
of experiments to obtain quantitative evaluations that
determine the robot’s complexity and to illustrate the
fact that by increasing the inclusiveness of the home
environment, the robot complexity can be reduced.
To perform these representative tasks, a robot
platform should have the capability to move around
the environment while avoiding obstacles and
choosing the shortest routes to reach the target.
A first prototype of a mobile assistive robot
(MARIS-I), that was intended to be used in a RIS, and
that incorporates only teleoperated control, was
introduced in (Aquilina et al., 2019). The present
work discusses an autonomous system based upon the
Simultaneous Localization and Mapping (SLAM)
(Alsadik and Karam, 2021) approach implemented on
the MARIS Omni directional three-wheeled robot
base using a Light Detection and Ranging (LiDAR)
sensor. The work emphasizes the implementation of
autonomous robot functionalities to map the
environment, to self-locate in that environment, and
to navigate to a destination with minimal instructions
using Robot Operating System (ROS)-based SLAM
algorithms, and a ROS navigation stack that
integrates with a camera or LiDAR.
The rest of this paper is organized as follows:
Section 2 explains the general methodology adopted
in this paper. Section 3 describes the LiDAR-based
SLAM approaches implemented on the MARIS
robot. Section 4 discusses the vision-based SLAM
implementations on the MARIS robot. Section 5
describes the selection of the most suitable SLAM
method. Section 6 describes the ROS-based
navigation stack implemented on MARIS for
autonomous navigation. Finally, section 7
summarizes the work and briefly discusses the
ongoing work to improve the RIS and to implement
pick and place functionalities to the MARIS robot.
2 GENERAL METHODOLOGY
Based on the RIS principles of observability and
accessibility (Elara et al., 2018), some general features
in a one-floor home environment were mandated a
priori. These were: no very bright objects, no dark
colour wall paints, no sharp edges on the furniture, no
rough floor surfaces, a less clustered environment,
non-slippery floors, no uneven surfaces, non-
reflective floor surfaces, no rooms with heavy doors,
and no glass or transparent environments.
(a)
(b)
(c)
Figure 1: RIS environments (a) RIS 1 with more objects in
the environment, (b) RIS 2 with a hallway, (c) RIS 3 with
hallways on both sides of the bedroom.
For the LiDAR investigation, three different RIS
environments were designed using Gazebo (Gazebo
Building Editor, 2023) considering the general
features with minor improvements from one another
in terms of furniture placements, room location and
hallway designs as shown in figure 1.
RIS 1 environment consists of an enclosed kitchen
separated from the hall by a wall. So, eight of the ten
representative sets of tasks require the robot to move
from the kitchen to the hall. RIS 2 environment has a
hallway with a kitchen in the hall that allows the robot
to move with ease. The blue shaded regions in figure
1, represent the LiDAR rays that will be converted to
2D maps. Additionally, artificial landmarks such as
familiar shapes in the environment help to map the
environment precisely and help for better robot
localization. RIS 3 environment has two hallways with
a room at the center that allows the robot to move from
Mapping, Localization and Navigation for an Assistive Mobile Robot in a Robot-Inclusive Space
173
any direction to find the optimal path for
navigation. The LiDAR investigation was carried out
firstly in the ROS-RVIZ simulation environment
(Kam et al., 2015).
Both LiDAR and machine vision investigations
were then carried out experimentally in the Robotic
Systems Laboratory (RSL) of the Department of
Mechanical Engineering of the University of Malta. In
order to determine the least complex mapping suitable
for our MARIS robot to perform the representative set
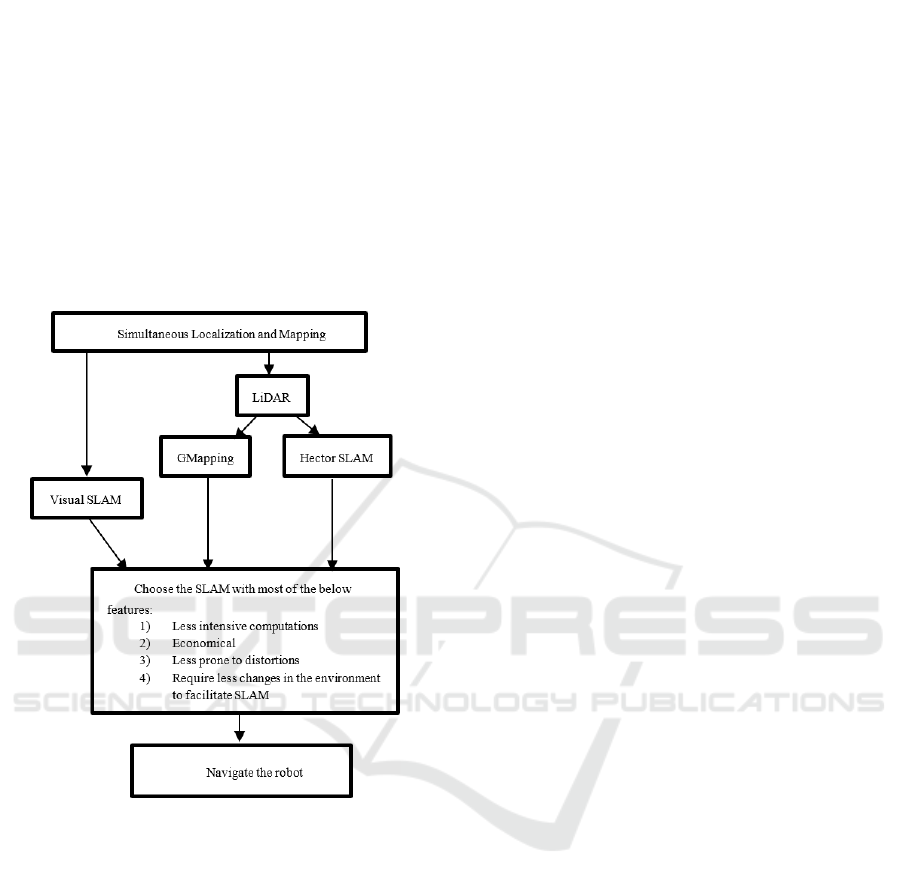
of tasks, the approach shown in figure 2 was adopted,
which will be further elaborated in the rest of the
paper.
Figure 2: Approach to design a less complex SLAM to
navigate the robot.
3 LiDAR-BASED SLAM
APPROACH
3.1 Overview
In order to conform to our objectives to introduce a
less complex and more economically accessible
autonomous robot in the RIS home environments, we
implemented LiDAR based SLAM using a relatively
low cost 2-D RPLiDAR from SLAMTEC
(SLAMTEC RPLiDAR, 2023). The SLAMTEC 2-D
RPLiDAR emits and receives the reflected laser beam
and measures the time the beam takes to return. This
process is repeated for more than 8000 times per
second, producing a map of the surroundings with a
desirable point density. This method was investigated
only after considering its quick and precise solution to
create maps. The GMapping (Revanth et al., 2020)
and Hector LiDAR-based SLAM (Sat t et al., 2020)
algorithms were investigated and implemented on the
MARIS Omni directional three-wheeled holonomic
base, which is equipped with DC motors with
encoders and control hardware that runs on the
Arduino platform. To implement a portable high-level
control system, a widely used ROS software
framework was installed on a Raspberry Pi 4 single-
board computer running the Ubuntu operating system.
ROS-based SLAM techniques compatible with the
SLAMTEC LiDAR software development kit
provided a way to map the surroundings and localize
the robot.
3.2 GMapping
GMapping is based on a Rao-Blackwellized Particle
filer (RBPF) (Revanth et al., 2020; Sarkka et al., 2007)
SLAM approach that is widely used for robot
navigation, and uses a particle filter in which each
particle carries an individual map of the environment.
GMapping considers the movement of the robot and
compares it with the recent environment data to
decrease the inaccuracies of the robot pose. The
parameters considered in the research are kernel size,
linear update, resample threshold and the number of
particles that combinedly determine the accuracy of
the map. The inputs to the GMapping SLAM
algorithm are the robot transform, laser data and
odometry data that give the information of the robot
pose, and generate the 2D occupancy grid or map that
displays the obstacles and free spaces. The obtained
map can be saved using the map server package of
ROS to make the robot localize and navigate in the
map. Initially, the GMapping SLAM algorithm was
implemented. The laser inputs for GMapping SLAM
were obtained from the SLAMTEC 2D LiDAR
connected to Raspberry Pi. The odometry data that are
used to estimate the robot position and orientation
were obtained from the encoders of the three DC
motors on the MARIS base, by determining the speed
and distance travelled by MARIS.
3.3 Hector SLAM
Hector SLAM on the other hand uses a scan matching
algorithm based on the Gauss-Newton approach
(Cheng et al., 2021) that can be used without odometry
data. The high update rate and accuracy of modern
LiDAR hardware make the scan matching algorithm
ICINCO 2023 - 20th International Conference on Informatics in Control, Automation and Robotics
174
sufficient for a robot to achieve accurate poses. The
scan matching algorithm matches the current scan to
the previous scan to determine the robot movement.
The parameters of the Hector SLAM including map
size, map update distance threshold, map update angle
threshold, laser minimum and maximum distance, can
be modified to obtain a better map of the environment.
The choice of these parameters makes the SLAM
adaptable to the specific environment, however
changing the parameters adds to the computational
cost of the algorithm. The speed of the algorithm and
frequency of data logging have an impact on map
accuracies. The parameters under each SLAM
algorithm mentioned before were modified uniformly
until a better map was reached. This kind of
adaptations helped us to determine the robot
complexity and quantify the RIS environments in
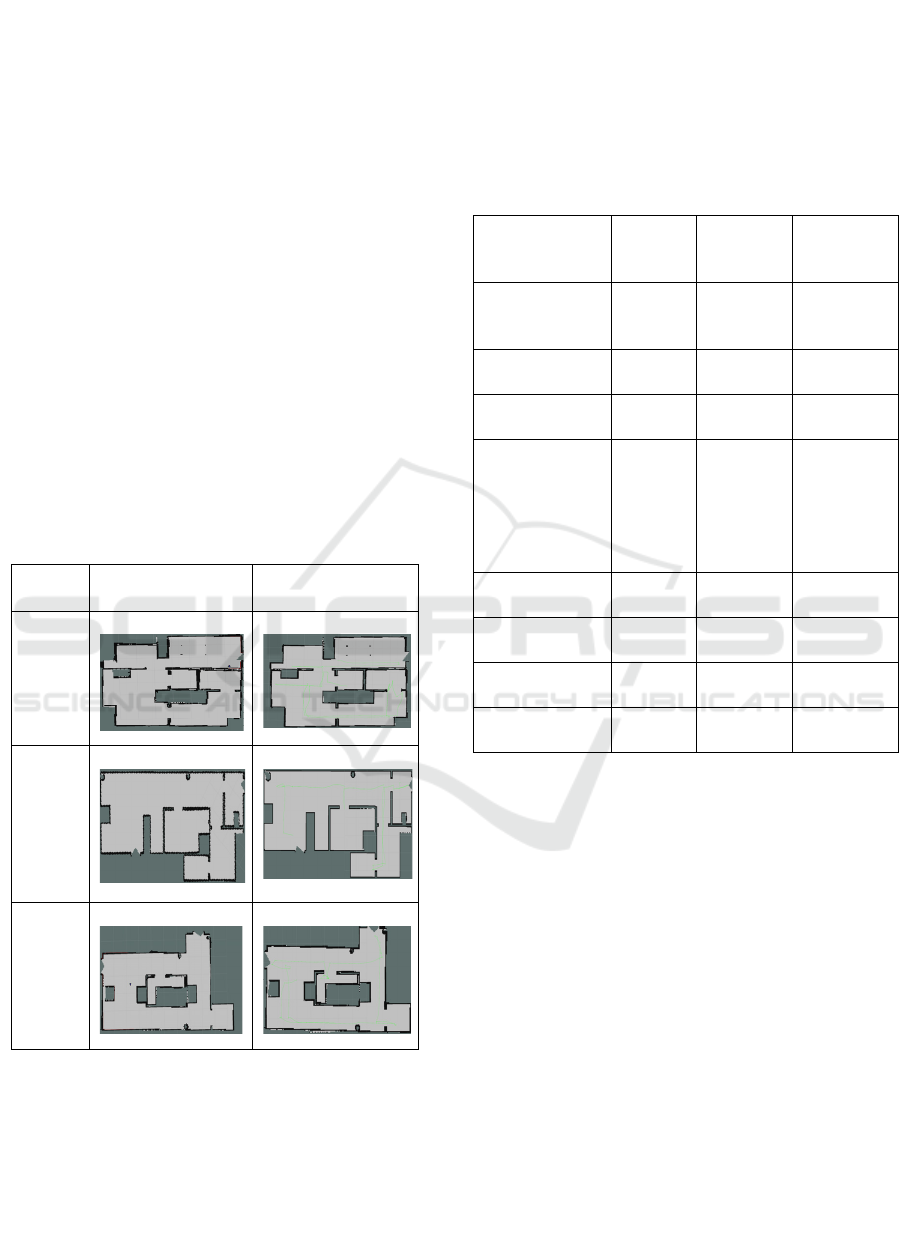
terms of inclusivity. Figure 3 shows the results of the
GMapping and Hector SLAM algorithms
implemented on the three RIS environments. For
instance, under predefined SLAM algorithm
parameters, higher complex environments will
generate distorted and less accurate maps than lesser
complex environments.
Enviro-
nment
GMapping Hector SLAM
Enviro-
nment
1
Enviro-
nment
2
Enviro-
nment
3
Figure 3: GMapping and Hector SLAM implemented on
RIS environments 1,2,3.
The second and third columns of Table 1 compare
the GMapping and Hector SLAM algorithms for the
three RIS environments combinedly, based on their
average values. For instance, the map error of
GMapping for the three RIS environments 1, 2, and 3
are 2cm, 2.4cm, and 2.1cm respectively. Their average
((2+2.4+2.1)/(3) = 2.17cm) is taken as a measure to
evaluate the accuracy of the SLAM algorithms. Other
factors such as noise and features detected in the maps
were assigned a value based on a widely followed 5-
point Likert scale (Allen and Seaman, 2007).
Table 1: Comparison of factors of GMapping, Hector,
Vision and LiDAR fusion SLAM.
Factors GMapping Hector Vision and
LiDAR fusion
mapping
Map accuracy
(average across
RIS 1, 2, 3)
2.17 cm
error
2.3 cm error 0.5 cm error
Time to build a
map
18
seconds
10 seconds 16 seconds
Noise of the
environment
3 (Likert
scale)
2 (Likert
scale)
3 (Likert
scale)
Number of
mapping
parameter
changes
4 5 No changes,
but under
uncluttered
and amiable
lighting
conditions
Computational
load
a) Memory
in %
18 6 42
b) CPU load
in %
89 16 98
Features detected
in the map
3 (Likert
scale)
4 (Likert
scale)
5(Likert
scale)
4 VISION-BASED SLAM
IMPLEMENTATIONS
To move a robot autonomously to some desired
location, the spatial representation of the environment
should be known to the robot. The robot needs to have
a sensor or sensors that save the data of the
environment to enable robot localization. For the
autonomous robot (MARIS-II), this mapping refers to
the construction of the spatial environment to help the
robot perceive its surroundings and localize itself, and
to navigate accordingly. This SLAM process would,
in our case, involve continuously fusing onboard
sensor data from the LiDAR and/or the cameras and
from wheel encoders. With the recent advancements
in vision-based technologies, camera-based vision-
SLAM is gaining importance because it provides 3D
information of the environment. However, these
systems are mostly used in an indoor environment as
Mapping, Localization and Navigation for an Assistive Mobile Robot in a Robot-Inclusive Space
175

the camera range is limited and the machine vision is
sensitive to variations in light (Debeunne and Vivet,
2020).
As the objective is to adopt a suitable algorithm
with no compromise in performing the representative
set of tasks or subtasks, we have also implemented
and evaluated the vision-based SLAM. The vision-
based SLAM uses an Intel RealSense 435i depth
camera (Intel RealSense 435i depth camera, 2023)
that runs on Ubuntu, an open source Linux
distribution installed on a Raspberry Pi single board
computer. The resulting pure 3D map of the
environment of the laboratory (Figure 4 (a)), which is
9.15x5.73m in size is shown in figure 4 (b). The pure
3D map algorithm utilized only the camera to
perceive the environment, but we will need a map that
contains floor as well as static and dynamic obstacles
for autonomous navigation. So, we have implemented
vision and LiDAR fusion-based mapping on MARIS.
(a)
(b)
Figure 4: Image of the RSL (a) actual RSL (b) pure 3D map
of RSL.
The pure 3D map is fused with the LiDAR data
using the Real-Time Appearance-Based Mapping
algorithm (Labbé and Michaud, 2019) to obtain the
floor map thus giving a perception of the objects
around as well as the obstacles in its path (Figure 5).
When the RSL has a cluttered environment with
objects spreading unevenly around, the vision system
has a lot of noise as shown in figure 5(a). But after re-
arranging the chairs and objects around properly the
map shows minimal noise as in figure 5(b). The inbuilt
Inertial Measurement Unit (IMU) (Ahmad et al.,
2013) sensor in the RealSense camera also achieves
the tasks of localizing the robot in an environment, but
with the progress in the mapping, and the continuous
localization of the robot in a complex environment, the
usage of the central processing unit (CPU) of the robot
will also increase, since feature complexity and
processing time are correlated. The robustness of the
CPU is questioned in this situation as real-time
applications demand graphical processing units
(GPU) rather than traditional processors. Since the
Raspberry Pi 4, used in our research to connect to the
RealSense camera, has a CPU that may not be
sufficient to perform Realtime SLAM, external GPUs
would have to be connected. Other ways to
compensate for the load on the CPU is by using fewer,
and similar, objects in the environment to facilitate
their detection by the systems (Kamarudin et al.,
2014). Furthermore, the challenge that limits the
performance of Visual-based SLAM is due to the
disruptions in the lighting conditions that introduce
inaccuracies. The fourth column of Table 1 displays
the factors of vision-based mapping.
(a)
(b)
Figure 5: Vision and LiDAR fusion mapping of the RSL:
(a) in a cluttered RSL environment, (b) in a properly
arranged RSL environment.
5 SELECTION OF THE SLAM
METHOD
After studying the performance of the three SLAM
algorithms as implemented separately on the MARIS
robot, a selection needed to be made as indicated in
Figure 2. Table 2 summarizes the main features of the
three methods as extracted from Table 1. Feature 1,
less intensive computations, refers to performing
SLAM with minimally sophisticated processing and
memory storage devices. Feature 2, economical in
terms of price, refers to performing SLAM with
comparatively cheaper equipment. Feature 3, less
prone to distortions, refers to SLAM map with
minimal unevenness. Feature 4, modification to the
environment to facilitate SLAM (both LiDAR and
Vision based) refers to efforts such as ensuring smooth
ICINCO 2023 - 20th International Conference on Informatics in Control, Automation and Robotics
176
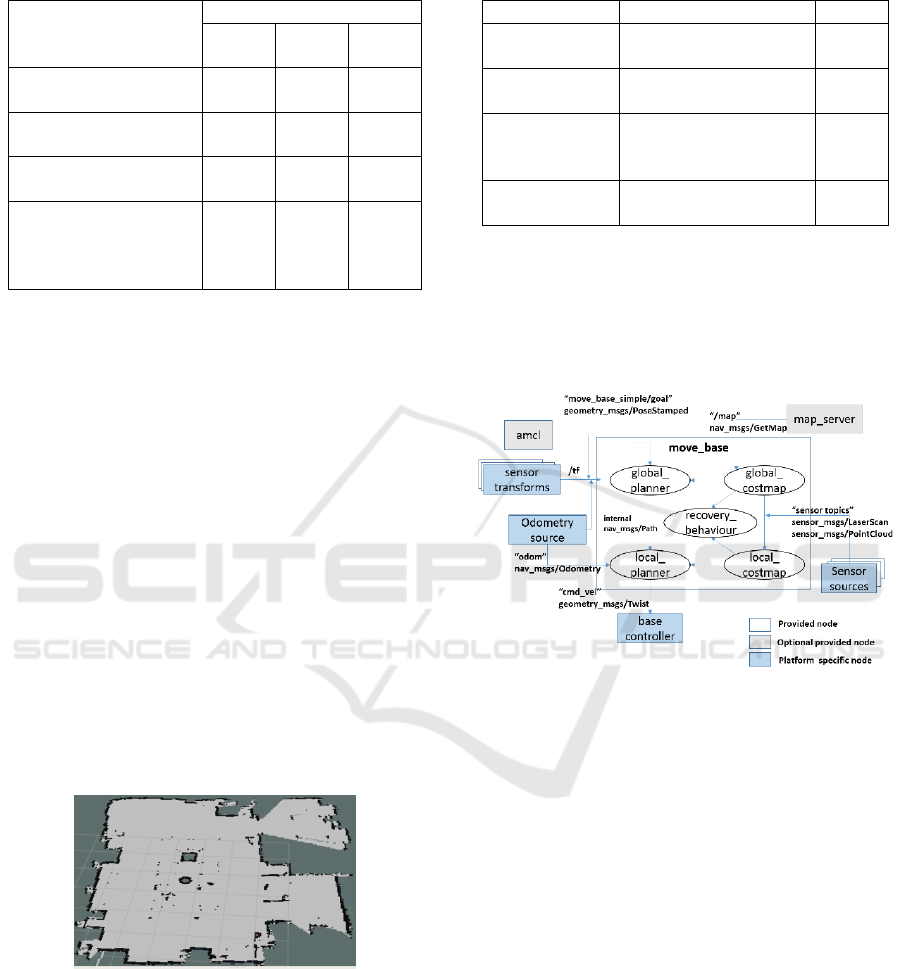
Table 2: Comparison of SLAM methods for the MARIS
robot.
Desired Features
SLAM Algorithms
Vision
based
GMapp
ing
Hector
1. Less intensive
computations
No No Yes
2. Economical in
terms of price
No Yes Yes
3. Less prone to
distortions
No Yes No
4. Require less
changes in the
environment to
facilitate SLAM
No Yes Yes
surfaces and maintaining favourable illumination
(Naraharisetti et al., 2022).
These features, including the computational load
and other factors are shown in Table 2, based on which
the Hector SLAM as investigated and tested on our
MARIS robot will be used for autonomous navigation.
Even though GMapping localizes the robot better than
Hector SLAM, the latter is sufficient and proved to be
reliable under restricted speed and angular velocities
of the robot in RIS environments 1,2, and 3.
Hector SLAM based experiments were also
performed in our RSL to evaluate the robustness of the
algorithm (Figure 6). The environment of the lab with
8 office chairs, tables with almost 24 supports and
wires under the tables resemble a cluttered
environment. The experiments helped us to
understand and tune our robot to navigate better in the
RIS environments. The parameters that were tuned,
shown in Table 3, were considered to adjust the robot
complexity to serve in any RIS environments
considering proper implementation of RIS principles.
Figure 6: Hector SLAM map of our RSL under fixed SLAM
parameters.
6 ROS-BASED ROBOT
NAVIGATION
Robot navigation involves planning routes and
moving
the robot safely and conveniently through an
Table 3: Tuned mapping parameters of the robot after
experiments.
Parameters Reason Values
Speed of the
robot
Robot moving at high
speed distorts the map
0.3m/s
Angular
velocity
Higher velocity will
distort map
1 rad/s
Map update
distance
threshold
The robot has to travel
to have an angular
change
0.2 m
Map update
angle threshold
The robot has to have
an angular change
0.2 rad
economically beneficial route from one point to
another. In order to implement autonomous navigation
on the MARIS robot by integrating the LiDAR and
other hardware architecture, an open source ROS
navigation stack (Setup and configuration of
Navigation stack, 2023) shown in figure 7 was chosen.
Figure 7: ROS Navigation stack architecture implemented
on MARIS.
The ROS navigation stack requires the Adaptive
Monte Carlo Localization (AMCL) ROS nodes to
localize the robot moving in a 2D space, and AMCL
takes the data from the laser scans to determine the
pose of the robot (Matias et al., 2015). Sensor
transforms refers to publishing the stream of LiDAR
data over ROS, and the odometry information
(Publishing Odometry information over ROS, 2023)
can be published using the transform (“tf”)
(transform-tf, 2023), which tracks the coordinate
frames and transforms points and vectors between the
coordinate frames. The map server node (Map_server,
2023) of ROS gives the map data to the ROS move
base package (Move_base package, 2023) that links
global and local planners to perform the navigation
task. The global cost map and the local cost map (setup
and configuration of Navigation stack, 2023) store the
information of the obstacles to create a long-term plan
to navigate the robot without colliding with the
obstacles. The base controller accepts the command
Mapping, Localization and Navigation for an Assistive Mobile Robot in a Robot-Inclusive Space
177

velocity topic from the moving base, which gives the
robot linear and angular velocities at that instant and
converts them to individual wheel velocities.
The ROS navigation stack for a differential (two-
wheeled) robot is supported with the required
information on its website. However, our MARIS
robot uses an omni directional three-wheeled
architecture, which is not readily supported in the
stack. So, changes in parameters such as the Odom
model type from “differential” to “omni-corrected” in
the AMCL launch file in ROS; changes in
odom_alpha1,2,3,4 that determine the expected noise
in the odometry rotation and translation estimate from
rotational and translational components of robot
motion; and the inclusion of a new odom_alpha5 that
determines the translation-related noise parameters
that are used to identify only the tendency of the robot
to translate in a perpendicular direction of travel
etc.,(AMCL parameters, 2023) were made so as to
implement a new navigation stack for the omni
directional three wheeled MARIS robot shown in
figure 8 (a).
Finally, as Hector SLAM is selected instead of
GMapping and vision-based SLAM, we have used the
pose obtained from the Hector mapping and supplied
the odometry message to the AMCL of ROS
navigation stack implemented on the MARIS robot.
This navigation is computationally low and accurate
as the 2D-RP LiDAR is used to obtain laser scan
matching. The navigation stack determines the
presence of obstacles in the environment and avoids
them. For instance, the four dark circles on the map
labelled with a red circle shown in figure 8 (b) are the
four supports of a table which, together with the
navigation stack, supply the local and global map to
the robot to move to the required destination.
(a) (b)
Figure 8: ROS based Navigation stack of MARIS, (a)
hardware, (b) global map.
7 CONCLUSIONS
In order to perform the representative set of tasks in a
one-floor home environment, the MARIS robot
requires mobility features such as obstacle avoidance
and collision free navigation. One of the objectives of
the MARIS research project is to design a minimally
complex robot that is able to perform the tasks in a
robot-inclusive environment, and as such this research
has involved conducting an experimental study to
determine which SLAM algorithm to best adopt in the
MARIS robot.
Initially, three RIS environments were considered
to implement and evaluate two LiDAR-based SLAM
algorithms, GMapping and Hector SLAM. The
computational intensity and map quality were
compared to select one SLAM that is most suitable for
these RIS environments. Hector SLAM was found to
be the more suitable.
Later a vision-based SLAM was also investigated
and implemented, as this can generate a 3D perception
or map of the environment. But with the increase in
the quality of the map, the computational intensity also
increases, which violates our objective of designing a
minimal complex robot. So, Hector SLAM was the
chosen algorithm. We thus tested the MARIS robot in
our RSL environment to tune and establish the optimal
Hector SLAM mapping parameters for our RIS
environments. In this work, it has been shown that
when the environment has been set up to
accommodate a robot, i.e. as a RIS, then LiDAR-based
Hector SLAM can match the functionality of the much
more computationally demanding LiDAR-based
GMapping or Visual-based SLAM methods. Based on
the selected Hector SLAM method with tuned
parameters, a new ROS based navigation stack was
implemented for the MARIS robot, for further
experimentation and development.
The mapping of the environment was found to
have inaccuracies if the environment is featureless or
has limited features, and there was also some
divergence from the real map because of the
accumulated inaccuracies. Thus, in a RIS environment
that facilitates the use of the robot, there should be
features that are recognizable. However, such features
may create a cluttered environment that may further
cause problems for the robot to navigate, and thus a
compromise must be found between these two
conflicting aspects. Ongoing work involves the
development of a system to optimize the number of
features that an environment should have to obtain a
better mapping that enables the robot to navigate with
fewer inaccuracies. The environment should obey
basic RIS principles, such as observability,
accessibility and manipulability.
For future developments, the MARIS robot is
envisioned to also have autonomous pick and place
capabilities using existing computer vision
technologies that can detect and track the object.
Since the MARIS robot is intended to serve the
MARIS
ICINCO 2023 - 20th International Conference on Informatics in Control, Automation and Robotics
178

elderly and the impaired in performing household
tasks, it is also intended to implement voice-based
manipulation capabilities to provide the robot with
wider functionality.
REFERENCES
Ahmad, N., Ghazilla, R. A. R., Khairi, N. M., & Kasi, V.
(2013). Reviews on various inertial measurement unit
(IMU) sensor applications. International Journal of
Signal Processing Systems 1, no.2, pp. 256-262.
Allen, I. E., & Seaman, C. A. (2007). Likert scales and data
analyses. Quality progress 40, no.7, pp. 64-65.
Alsadik, B., & Karam, S. (2021). The simultaneous
localization and mapping (SLAM)-An overview. Surv.
Geospat. Eng. J, 2, pp. 34-45.
AMCL parameters, (2023). [Online]. Available:
http://wiki.ros.org/amcl.
Aquilina, Y., Saliba, M. A., & Fabri, S. G. (2019). Mobile
Assistive Robot in an Inclusive Space: An Introduction
to the MARIS Project. In Social Robotics: 11th
International Conference, ICSR 2019, Proceedings 11
pp. 538-547.
ASIMO robot-The world’s most advanced robot, (2023).
[Online]. Available: https://asimo.honda.com/.
Boston Dynamics - Spot, (2023). [Online]. Available:
https://www.bostondynamics.com/products/spot.
Debeunne, C., & Vivet, D. (2020). A review of visual-
LiDAR fusion based simultaneous localization and
mapping. Sensors 20, no.7, p. 2068.
Elara, M. R., Rojas, N., & Chua, A. (2014). Design
principles for robot inclusive spaces: A case study with
Roomba. In 2014 IEEE International Conference on
Robotics and Automation (ICRA), pp. 5593-5599.
Gazebo Building Editor, (2023). [Online]. Available:
https://www.classic.gazebosim.org/tutorials?cat=build
_world&tut=building_editor.
Intel RealSense 435i depth camera, (2023). [Online].
Available: https://www.intelrealsense.com/depth-
camera-d435i/.
Kamarudin, K., Mamduh, S. M., Shakaff, A. Y. M., &
Zakaria, A. (2014). Performance analysis of the
microsoft kinect sensor for 2D simultaneous
localization and mapping (SLAM) techniques. Sensors
14, no.12, pp. 23365-23387.
Kam, H. R., Lee, S. H., Park, T., & Kim, C. H. (2015). Rviz:
a toolkit for real domain data visualization.
Telecommunication Systems 60, pp. 337-345.
Labbé, M., & Michaud, F. (2019). RTAB ‐ Map as an
open‐source lidar and visual simultaneous localization
and mapping library for large‐scale and long‐term
online operation. Journal of field robotics, 36, no.2, pp.
416-446.
Map_server, (2023). [Online]. Available:http://wiki.ros.
org/map_server.
Matias, L. P., Santos, T. C., Wolf, D. F., & Souza, J. R.
(2015). Path planning and autonomous navigation using
AMCL and AD. In 2015 12th Latin American Robotics
Symposium and 2015 3rd Brazilian Symposium on
Robotics (LARS-SBR), pp. 320-324.
Move_base package, (2023). [Online]. Available:
http://wiki.ros.org/move_base.
Naraharisetti, P. R., Saliba, M. A., & Fabri, S. G. (2022).
Towards the Quantification of Robot-inclusiveness of a
Space and the Implications on Robot Complexity. In
2022 8th International Conference on Automation,
Robotics and Applications (ICARA), pp. 39-43
Polaris-Markert-Research. Household Robots Market
Share, Size, Trends, Industry Analysis Report, (2023).
[Online].Available:https://www.polarismarketresearch
.com/industry-analysis/household-robots-market.
Publishing Odometry information over ROS, (2023).
[Online].Available:http://wiki.ros.org/navigation/Tutor
ials/RobotSetup/Odom.
Revanth, C. M., Saravanakumar, D., Jegadeeshwaran, R.,
& Sakthivel, G. (2020, December). Simultaneous
Localization and Mapping of Mobile Robot using
GMapping Algorithm. In 2020 IEEE International
Symposium on Smart Electronic Systems (iSES)
(Formerly iNiS), pp. 56-60.
Saat, S., Abd Rashid, W. N., Tumari, M. Z. M., & Saealal,
M. S. (2020). Hectorslam 2d mapping for simultaneous
localization and mapping (slam). In Journal of Physics:
Conference Series, Vol. 1529, No. 4, p. 042032.
Särkkä, S., Vehtari, A., & Lampinen, J. (2007). Rao-
Blackwellized particle filter for multiple target
tracking. Information Fusion 8, no.1, pp. 2-15.
Seidita, V., Lanza, F., Pipitone, A., & Chella, A. (2021).
Robots as intelligent assistants to face COVID-19
pandemic. Briefings in Bioinformatics 22, no.2,
pp.823-831.
Servi robot from bear robotics, (2023). [Online]. Available:
https://www.bearrobotics.ai/restaurants.
Setup and Configuration of the Navigation Stack on a
Robot, (2023). [Online]. Available:
http://wiki.ros.org/navigation/Tutorials/RobotSetup.
SLAMTEC RpLiDAR, (2023). [Online]. Available:
https://www.slamtec.com/en/LiDAR/A1.
Sosa, R., Montiel, M., Sandoval, E. B., & Mohan, R. E.
(2018). Robot ergonomics: Towards human-centred
and robot-inclusive design. In DS 92: Proceedings of
the DESIGN 2018 15th International Design
Conference, pp. 2323-2334.
“transform-“tf”, (2023). [Online]. Available: http://wiki.
ros.org/tf.
Wu, M., Cheng, C., & Shang, H. (2021). 2D LIDAR SLAM
Based On Gauss-Newton. In 2021 International
Conference on Networking Systems of AI (INSAI), pp.
90-94.
Wang, H., Yu, Y., & Yuan, Q. (2011, July). Application of
Dijkstra algorithm in robot path-planning. In 2011
second international conference on mechanic
automation and control engineering, pp. 1067-1069.
Yang, X. (2021). Slam and navigation of indoor robot
based on ROS and lidar. In Journal of physics:
conference series, Vol. 1748, No. 2, p. 022038.
Mapping, Localization and Navigation for an Assistive Mobile Robot in a Robot-Inclusive Space
179
