
MOEA/D with Adaptive Mutation Operator Based on Walsh
Decomposition: Application to Nuclear Reactor Control Optimization
Baptiste Gasse
1,2
, S
´
ebastien Verel
3
and Jean-Michel Do
2
1
Universit
´
e Paris-Saclay, 91190 Gif-sur-Yvette, France
2
CEA, Service d’
´
Etudes des R
´
eacteurs et de Math
´
ematiques Appliqu
´
ees, 91191 Gif-sur-Yvette, France
3
Univ. Littoral C
ˆ
ote d’Opale, UR 4491, LISIC, Laboratoire d’Informatique Signal et Image de la C
ˆ
ote d’Opale,
Keywords:
Applied Computing Methodologies, Bi-Objective Optimization, Surrogate Model/fitness Approximation,
Nuclear Reactor Physics.
Abstract:
France has a fleet of nuclear reactors that makes up a significant proportion of the electricity generation mix.
This over-representation of nuclear power compared with other energy sources leads reactors to operate in load
following mode in order to balance supply and demand on the electricity grid. The increasing penetration of
intermittent energies in the mix and the desire not to renew the entire current nuclear fleet bring active research
into optimising the control of reactors operating in load following mode to allow them greater flexibility. In
this study, we propose to solve a new bi-objective unit commitment problem using an MOEA/D algorithm
equipped with an adaptive mutation operator based on a Walsh surrogate model of a black-box function with a
high computation cost. The method consists of taking advantage of the linear effects associated with the prob-
lem variables thanks to the Walsh coefficients to regularly update the mutation rate of the variation operator
and explore the problem’s search space more judiciously. We show that this method enables to penalize some
variables by decreasing their mutation probability without affecting the global performance of the search for
Pareto-optimal solutions, which makes it similar to an adaptive in-line fitness landscape analysis.
1 INTRODUCTION
1.1 Context and Motivations
In France, the strategy adopted in terms of energy
transition is leading to a reflection on a change of
the national electricity production mix to achieve car-
bon neutrality by 2050. In 2022, 62.7% of elec-
tricity production was provided by nuclear reactors
in metropolitan France, 11.1% by hydroelectricity
sources, 12.7% by wind and solar power, and 13.5%
by fossil-fired power stations, the vast majority of
which are gas-fired. While the energy produced by the
fleet of nuclear reactors is controllable, i.e. capable
of adapting their power output to ensure the supply-
demand balance of the electricity network, wind and
solar energy sources are intermittent since weather
conditions affect their load factor. This technological
difference coupled with the fact that the merit order
curve of the French electricity market gives consump-
tion priority to intermittent resources raises a growing
need for manoeuvrability for current nuclear reactors.
Indeed, research has shown that a high penetration of
intermittent energies in the electricity production mix
decorrelates the daily nuclear production profile from
real electricity demand, implies reduced power varia-
tion times and, depending on the number of reactors
in operation in the coming years, decreases the nu-
clear fleet’s load factor (Denholm and Hand, 2011;
Cany et al., 2018). Numerous works have studied the
issue from the point of view of economic constraints,
leading to unit commitment type optimization calcu-
lations in electricity mix scenarios with a high pene-
tration of intermittent energies without relying on fos-
sil plants (Xu et al., 2011; Jenkins et al., 2018; Ju
et al., 2019), but also with technical feasibility criteria
since power variations in a pressurized water reactor
(PWR) induce operating constraints linked to safety
rules. This article introduces a work that is in line
with this second approach.
The optimization problem at stake in this study
requires the use of a black-box function with a high
computation time, as around 45 minutes are needed
for the calculation of a single point in the objective
Gasse, B., Verel, S. and Do, J.
MOEA/D with Adaptive Mutation Operator Based on Walsh Decomposition: Application to Nuclear Reactor Control Optimization.
DOI: 10.5220/0012177200003595
In Proceedings of the 15th International Joint Conference on Computational Intelligence (IJCCI 2023), pages 75-85
ISBN: 978-989-758-674-3; ISSN: 2184-3236
Copyright © 2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
75

space. In a context of limited computing resources,
this time constraint implies that the number of evalua-
tions can’t be too high even though the main goal is to
compare optimization methods with each other while
guaranteeing sufficient statistics to interpret the re-
sults. The use of best direction search assistance in the
decomposition of the search space for the MOEA/D
algorithm using a surrogate model of the fitness func-
tion has led to a slight gain in performance (Drouet
et al., 2020b), but the use of an adaptive mutation op-
erator for a reactor controlling simulator hasn’t been
tested yet. In this study, we propose a new adaptive
method based on a Walsh surrogate model of the fit-
ness function to adapt regularly the mutation operator
of MOEA/D.
The paper is organised as follows. Firstly section
2 introduces related work in the fields of MOEA/D
adaptive methods, use of Walsh surrogate models for
optimization techniques and nuclear reactor optimiza-
tions for load following control mode. Section 3 is
reserved both for a review of nuclear reactor physics
notions useful for the understanding of PWR control,
and the definition of the optimization problem ad-
dressed in this study. Section 4 describes the method-
ology behind the adaptive bi-objective evolutionary
optimization algorithm using Walsh surrogate model
to update the mutation operator regularly. Finally,
section 5 describes the experimental setup and some
discussions of the results obtained with our method.
2 RELATED WORKS
Adaptive Evolutionary Algorithms: in (Shim et al.,
2012) a general optimization study using three evolu-
tionary algorithms of different natures has been con-
ducted. Authors found that using the ratio of promis-
ing solutions obtained by each optimizer at a given
generation to select the proportion of distributed solu-
tions for each algorithm at the next generation results
in a significant performance improvement compared
with non-adaptive techniques. Adaptive weight ad-
justment techniques for MOEA/D has been conducted
in (Qi et al., 2014) in the case of complex Pareto
front to prevent the penalization of some regions in
the objective space during the optimization. More re-
cently, optimization methods involving an adaptation
of the mutation operator in an evolutionary algorithm
has been carried out in (Cruz-Salinas and Perdomo,
2017; Prieto and G
´
omez, 2020), where decision trees
and decomposition-based approaches helps to adapt
dynamically the mutation rates of genetic operators.
This multi-objective hybrid adaptive algorithm has
shown better performance on benchmark functions in
its ability to find a well-covered and well-distributed
set of points on the Pareto Front.
Black-box Optimization: in (Dadkhahi et al.,
2022), two novel Fourier representations as surrogate
model for problems involving the use of black-box
functions over categorical variables has shown good
performance when combined with a variety of search
algorithms. One of the Fourier representation devel-
oped in this study is made of an abridged one-hot
encoded Boolean expansion recalling previous work
published in (Verel et al., 2018; Lepr
ˆ
etre et al., 2019;
Derbel et al., 2023) which developed Walsh polyno-
mials as surrogate models for pseudo-Boolean opti-
mization problems. These studies have shown Walsh
surrogate models are relevant for benchmark prob-
lems and should be considered to improve the per-
formance of optimization algorithm for combinatorial
problems.
Nuclear Reactor Control Optimization: previous
works (Muniglia et al., 2018; Drouet et al., 2020b), on
optimising the control of nuclear reactors have shown
the existence of optimized sets of technical parame-
ters in order to minimize the axial destabilization of
the power profile within the reactor core (see sect. 3)
as well as the use of liquid effluents in load follow-
ing mode. These optimizations were carried out for
a fixed transient and by exploring different parame-
ters for the movement of the control rods which are
inserted into the core during the power reduction. In
our study, we propose to jointly optimize rod param-
eters with the best way of distributing a fleet transient
involving two nuclear reactors.
3 NUCLEAR REACTOR PHYSICS
3.1 Description of a French PWR
Reactor
This optimization study is conducted on a fleet of
two 1300 MW nuclear reactors typical of the units
involved in load following of the French power grid.
Apart from the heat production medium, a nuclear re-
actor does not differ much from a conventional ther-
mal power plant in terms of electricity production.
There are three circuits : first, the primary circuit,
where water passes through the reactor’s core from
bottom to top and is heated by the fission reactions
of uranium 235 nuclei. Once it reaches the top of the
core, the primary water is redirected to a steam gener-
ator where its heat is exchanged with the water of the
secondary circuit, which vaporizes. The steam thus
ECTA 2023 - 15th International Conference on Evolutionary Computation Theory and Applications
76
produced is expanded in the turbines, where thermal
energy is converted into mechanical energy. The ro-
tation of the shaft of the successive turbines makes
an alternator to rotate, which converts kinetic energy
into electricity. The role of the last circuit, called
the cooling circuit, is to evacuate the residual heat
which could not be converted into mechanical energy
by virtue of the second principle of thermodynamics.
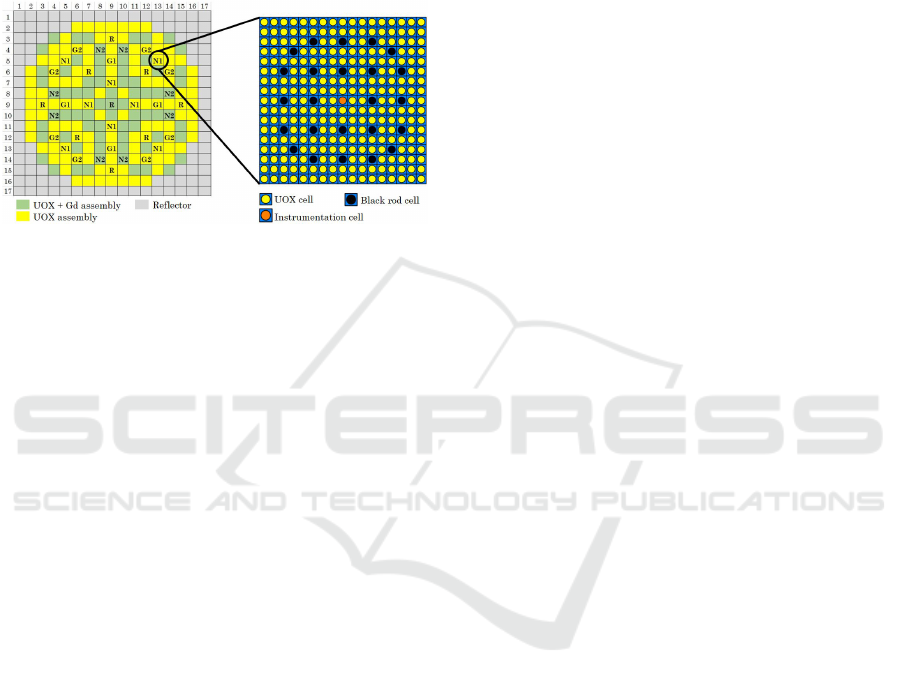
Figure 1: Typical load map for 1300 MW French PWR
(left) and zoom on a single assembly provided with black
rods (right).
The core is roughly comparable to a cylinder 4
meters high and 3 meters in diameter. It is composed
of 193 fuel assemblies and 62 reflector assemblies
(see fig. 1, left). The fuel assemblies all have the
same geometric pattern : 264 fuel pins about 4 me-
ters long that contain uranium oxide pellets (UOX)
over their entire height, and 25 guide tubes (see fig. 1,
right). These tubes enable neutron-absorbing rods to
slide vertically in order to regulate the neutron popu-
lation, and thus the fission chain reaction. These rods
are placed at strategic points in the core for the sake
of a flatten radial flux distribution during power varia-
tions. The reflector assemblies, shaded in gray on the
figure 1 (left) limit the leakage of neutrons out of the
core as well as the wear of the vessel which ages with
irradiation.
3.2 Rods
Concerning the rods, the rate of captured neutrons in-
creases as they inserts into the core. Transiently, the
number of neutrons decreases in the core and conse-
quently the fission rate, which implies a decrease in
the power produced. The opposite occurs when rods
are extracted from the core. Rods are divided into two
groups:
• on the one hand, power shimming group of rods
(PSG) that compensates the power defect during
load variations, which is the change in core re-
activity due to moderator and fuel neutron feed-
backs. Four groups of rods compose PSG (fig.
1, left) : grey rods (G1 and G2) and black rods
(N1 and N2), which differ by their respective neu-
tron absorption capacity. During a load drop, PSG
groups of rods don’t plunge into the core simulta-
neously but with constant overlaps to prevent too
much axial power imbalance. Let r
1
(resp. r
2
)
be the overlap value between groups G1 and G2
(resp. G2 and N1) : G2 moves as soon as G1 has
reached an insertion step value of r
1
as well as N1
moves when G2 exceeds r
2
inserted steps. The
position of the PSG is slaved to the net electrical
power of the nuclear power plant ;
• on the other hand, temperature regulation group
of rods (TRG) aims at respecting the temperature
program set by the operating technical specifica-
tions all along the load transient. NPP operator in-
serts (resp. extracts) the TRG as soon as core wa-
ter is hotter (resp. colder) than the setpoint with a
dead band of 0.8°C. The operator can move TRG
rods all along a fixed manoeuvring band whose
width is given in steps by the parameter b, 27 steps
for a typical P4 1300 MW reactor (Grard, 2014).
3.3 Boron
Soluble boron is a neutron poison diluted in core’s
primary water. Contrary to the rods its concentra-
tion adjustment is much slower than a rod step move-
ment and its effect are homogeneous in the core. In
G mode load follow control, it is mainly used to com-
pensate reactivity variations occurring during the evo-
lution of xenon concentration in the core, which is a
strong neutron absorber with a delayed dynamic at the
time scale of a load drop. Moreover, xenon equilib-
rium of production (mostly due to iodine decay) and
consumption (by neutron capture) is highly tied to the
variation of neutron flux in the core. Not only a power
drop diminishes neutron flux absolutely, it also redis-
tributes core’s axial power profile due to combined
effects of rods insertion and an axially evolutionary
negative moderator temperature coefficient. In case
of reactivity loss, the plant operator injects clear water
to dilute boron whereas he increases boron concentra-
tion in case of abnormal reactivity rise.
3.4 Control of Load Variations
3.4.1 Core Computer Simulator in
Load-Following Mode
G mode load control consists in the coordinated use
of both removable neutron absorbing rods and soluble
boron diluted in the water of the primary circuit. Basi-
cally, controlling a nuclear reactor consists in adjust-
ing the position of the rods and the boron concentra-
MOEA/D with Adaptive Mutation Operator Based on Walsh Decomposition: Application to Nuclear Reactor Control Optimization
77
tion to enable load variations while respecting safety
margins at all times. Much effort has been put into
simulating the operation of a nuclear reactor. Strate-
gies aiming at modeling a human behavior regarding
the interpretation of the observables of the core and
the decisions which result from it have been devel-
oped (Muniglia et al., 2016; Drouet et al., 2020a).
Similarly, PID controllers
1
performs well to optimize
the current control mode and minimize the power os-
cillations mainly related to the axial transients of the
xenon (Zeng et al., 2020; Rafiei et al., 2021; Mah-
fudin et al., 2022). In this study, we choose to opt for
a model close to the real case G mode and we search
for an optimization focusing on variables that do not
intrinsically affect the behavior of the dummy opera-
tor for a corrective action using rods or boron. What-
ever the model of a fictitious operator, safety rules im-
pose to guarantee the axial power stability of the core
during load following mode. The observable parame-
ter ∆I quantifies it ; given the power produced in the
core’s upper half and lower half denoted P
U
and P
D
respectively, and P
rel
the relative power of the core :
∆I =
P
U
− P
D
P
U
+ P
D
P
rel
, given in % of core’s height. (1)
A plant operator must control the reactor during load
following so that ∆I remains within a margin of ±
5% of its value at its state before the power drop.
Maintaining a good axial power stability may lead the
operator to favor control of the neutron flux by the
boron rather than by the rods, since they distort the
power profile of the core more widely. However, re-
lying more extensively on boron adjustments in the
primary circuit means a rise in fluid transfers leading
to the generation of more liquid waste one seeks to
minimize for technical, economic and environmental
concerns.
3.4.2 Optimization Problem Setting
Previous work has introduced solutions of better sets
of PSG overlaps and width of the TRG manoeuvring
band for a 6-6 hours transient (6 hours at 30% of nom-
inal power followed by 6 hours at full power) to guar-
antee a better stability against axial displacement of
the neutron flux distribution as well as on the quantity
of liquid effluents produced during the load transient
(Muniglia et al., 2018; Drouet et al., 2020a). Finding
the best set of operating levers whatever the ampli-
tude of load drops is a perspective of these studies.
1
PID controllers computes the corrective action by esti-
mating the (p)roportionnal, (i)ntegral and (d)erivative signal
error over time.
We introduce in this work the Nuclear Unit Commit-
ment Optimization Problem (NUCOP), which aims to
jointly find the best distribution of a fleet load tran-
sient to a group of two reactors while optimizing rods
parameters. Solving NUCOP would lead to judge the
better way of meeting grid’s needs with a given fleet
of reactors while staying within safety rules and min-
imizing both objectives as it investigates two main is-
sues :
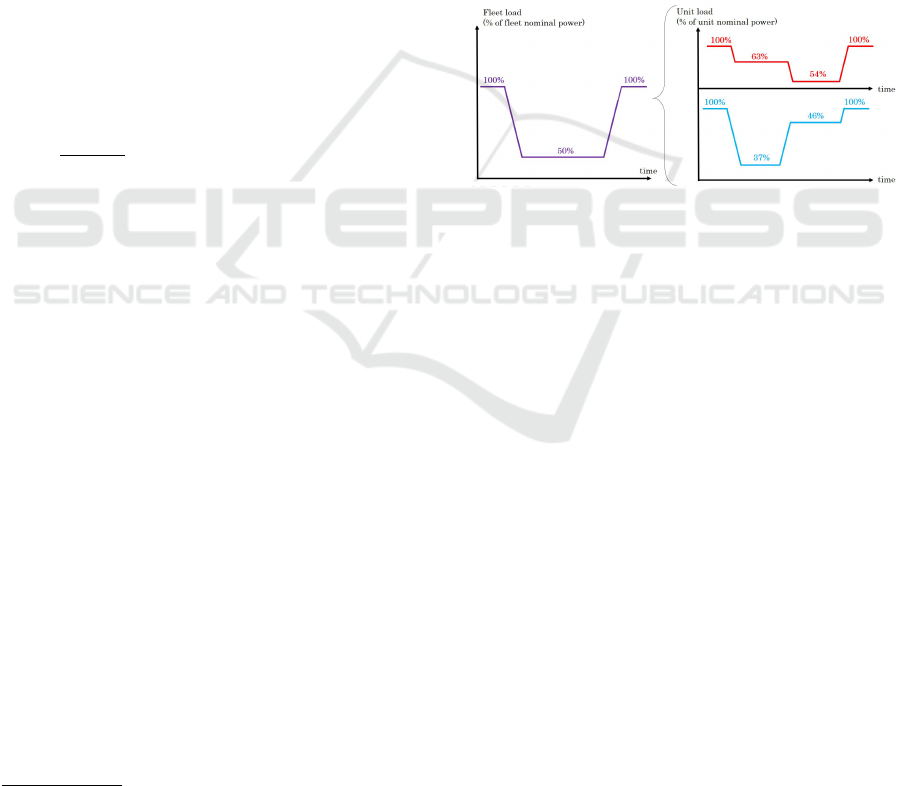
• an optimized way to involve both reactors to as-
sume the fleet transient instead of letting a single
reactor doing a deep load drop (fig. 2) ;
• the joint search of the best division of the fleet
transient with the best set of PSG rods overlaps
and TRG manoeuvring band’s width adapted for
both reactors.
Figure 2: Example of a two-reactor distribution for the NU-
COP problem. Fleet transient on the left is divided into two
transients on the right. In this case, both reactors have the
same nominal power. Amplitudes are not to scale.
Search Space: NUCOP is a discrete and ex-
pensive bi-objective optimization problem with a 5-
dimensional search space of size ∼ 10
10
, conducted
on a fleet composed of two French PWR reactors of
1300 MW each. First type of search space’s variables
are rods overlaps r
1
and r
2
as well as the width b
of the maneuvering band of TRG. These numerical
variables are counted into rod steps. Second type of
variables are categorical and identify the unit com-
mitment dispatch of the two-reactor fleet. As shown
on figure 2, we enable each units to operate any load
drop as long as the whole fleet drop reaches 50% of
fleet’s nominal power. The fleet drop is divided into
two time zones which leads to two variables of power
distribution d
1
and d
2
. For each d
i
we fix 40 possible
possibilities for the power distribution. Search space
is summarized in table 1.
Fitness Space: Given the domain X =
{
(x
0
,...,x
4
),x
i
∈ E
i
}
⊂ N
5
, the objective is to
find all Pareto-optimal solutions x
∗
such as :
x
∗
= argmin
x∈X
f (x) (2)
ECTA 2023 - 15th International Conference on Evolutionary Computation Theory and Applications
78
Table 1: Search space sub-variables and their range. Brack-
ets [a,b] refers to the integer range
{
a,a + 1, ...,b
}
while
shorter notation [b] is for the
{
0,1,...,b
}
range.
Sub-variable Parameter Range
x
0
r
1
E
0
= [255]
x
1
r
2
E
1
= [255]
x
2
b E
2
= [7,118]
x
3
d
1
E
3
= [39]
x
4
d
2
E
4
= [39]
where f : X → R
2
is a black-box function computa-
tionally expensive to evaluate which returns a two ob-
jective values. Objective functions respectively stands
for the Euclidean distances in the 2D space of the gen-
erated liquid effluents (V
1
,V
2
), and the integral of ax-
ial power imbalance (∆I
1
,∆I
2
) during each transient
and for each reactor. The black-box fitness function
is :
f : X → R
2
x 7→ z =
f
1
(x)
f
2
(x)
=
p
V
1
2
+V
2
2
q
∆I
1
2
+∆I
2
2
.
(3)
4 OPTIMIZATION USING
ADAPTIVE MOEA/D WITH
WALSH SURROGATE
The NUCOP problem is a bi-objective black-box op-
timization problem. This kind of problem can be
solved with a variety of metaheuristic methods whose
goal is to find the set of non-dominated solutions of
the problem. For a bi-objective minimization prob-
lem, a solution x is dominated by x
′
iff f
1
(x
′
) ≤ f
1
(x)
and f
2
(x
′
) ≤ f
2
(x), and if there is an i ∈ {1,2} such
that f
i
(x
′
) < f
i
(x). A solution x
⋆
is non-dominated if
there is no other solution x such that x
⋆
is dominated
by x. The set of non-dominated solutions is called the
Pareto set, the image of this set by f constitutes the
Pareto front of the objective space. The metaheuristic
used for solving NUCOP is a variant of the MOEA/D
algorithm (Zhang and Li, 2007) which is an evolu-
tionary algorithm based on the decomposition of the
objective space into several directions.
4.1 MOEA/D for Solving NUCOP
Let Λ =
{
λ
1
,...,λ
Λ
}
be the set of directions splitting
the objective space. MOEA/D consists in dividing the
bi-objective problem into Λ single objective subprob-
lems communicating with each other to enable a co-
operatively solving of the initial problem. Each sub-
problem aims at minimizing f along its respective as-
signed direction. The single objective function asso-
ciated to each direction λ
q
is the Chebyshev function
defined as
g(z | λ
q
) = max
i∈{1,2}
λ
q,i
|z
ref
i
− z
i
|
(4)
where z
ref
is the reference point set to the minimal
values of objectives. We save in a buffer file each best
solutions found for each subproblem (namely for each
direction λ
q
). Each iteration of the algorithm (see Al-
gorithm 1) gives the fitness values of a candidate so-
lution x in a direction λ
q
; we compute g(x | λ
q
) and
compare the result to solutions saved in the buffer file
whose directions are in the set T
λ
q
(T ), which refers to
the T neighbouring directions of λ
q
. We replace any
solution of the buffer file whose corresponding direc-
tion is in T
λ
q
(T ) by x iff x dominates it.
Algorithm 1: MOEA/D : master process.
1 for p ← 1 to N
proc
do
2 x
p
← Init. with latin hypercube sampler ;
3 λ
p
← Attribute a direction among Λ ;
4 Send x
p
to worker process p
5 end
6 z
ref
←Init. reference point ;
7 x
⋆
λ
q
←Init. best x
p
for each direction λ
q
;
8 z
⋆
λ
q
←Init. best f (x
p
) for each direction λ
q
;
9 S ←
/
0 ; // Set of evaluated solutions
10 while time left do
11 Receive (x
p
,z
p
) from worker process p
from direction λ
p
;
12 S ← S ∪ {(x
p
,z
p
)} ;
13 if z
p
dominates z
ref
then
14 z
ref
← z
p
; // update reference
15 end
16 for all directions λ
q
∈ T
λ
p
(T ) do
17 if g(z
p
|λ
p
) ≤ g(z
⋆
λ
q
|λ
p
) then
18 x
⋆
λ
q
← x
p
;
19 z
⋆
λ
q
← z
p
; // update best
known solutions buffer
file
20 end
21 end
22 x
p
← Mutate x
⋆
λ
p
;
23 Send x
p
to worker process p ;
24 end
In addition, our MOEA/D algorithm benefits from
a massive parallel architecture and follows a master-
workers procedure (algorithms 1 and 2). The com-
putation time to evaluate a candidate solution of NU-
COP is expensive (on average 45 minutes). Moreover,
MOEA/D with Adaptive Mutation Operator Based on Walsh Decomposition: Application to Nuclear Reactor Control Optimization
79

this computation time has a large variance according
to the rod parameters and fleet’s transient distribution.
Because of limited computing resources, the master-
workers algorithm is asynchronous to avoid wasting
time between the evaluation of the first and the last
worker associated to each direction.
Algorithm 2: MOEA/D: worker process.
1 Receive x
p
from master process ;
2 Compute z
p
= f (x
p
) ;
3 Send (x
p
,z
p
) to master process ;
4.2 Walsh Surrogate Model
One way to face expensive fitness evaluation is to use
a surrogate model in order to extract more informa-
tion from the costly black-box fitness function, and to
better guide the search. Popular methods of assisted
optimization with surrogate models try to substitute
the original time-consuming black-box function with
a cheap approximation of it : the best solution given
by the surrogate function is then computed as the
next candidate through the real problem function. In
the context of discrete optimization, Walsh functions
have already been used as surrogate model for solv-
ing pseudo-boolean optimization problems (Lepr
ˆ
etre
et al., 2019; Verel et al., 2018).
4.2.1 Walsh Functions
Notations : we reuse range notations described in ta-
ble 1. Also, ♯E refers to the cardinality of a set E.
The set of Walsh functions (W
k
)
k∈
[
2
d
−1
]
is a nor-
mal and orthogonal basis of the space of pseudo-
Boolean functions F
d
= { f :
{
0,1
}
d
→ R} with d be-
ing an integer (Walsh, 1923; Bethke, 1980),(Lepr
ˆ
etre
et al., 2019; Verel et al., 2018). Expansions based
on Walsh functions are sometime called Fourier ex-
pansions as they have similar properties (O’Donnell,
2021). By virtue of basis properties, any f ∈ F
d
can
be written as a unique linear combination of Walsh
functions:
∀x ∈ {0,1}
d
, f (x) =
2
d
−1
∑
k=0
ω
k
W
k
(x) (5)
where ω
k
∈ R is the coefficient of the k-th Walsh func-
tion W
k
defined by:
W
k
(x) = (−1)
∑
d−1
i=0
k
i
x
i
(6)
where k
i
∈ {0, 1} is the i
th
binary digit of the integer
k. As classical Fourier series for an analog signal, and
in order to reduce the number of terms in the series,
it is possible to truncate the Walsh expansion of f to
get a polynomial approximation function
ˆ
f . We call
order of the k-th Walsh function the number of 1 in
the binary representation of k. The Walsh function of
order 0 is the constant term, Walsh functions of order
1 are linear functions as they only depend on 1 binary
variable, Walsh functions of order 2 are quadratic, and
so on. This leads to the following rearrangement of
the series:
f (x) =
2
d
−1
∑
k=0
ω
k
W
k
(x) =
d
∑
n=0
∑
k with
ord(W
k
)=n
ω
k
W
k
(x). (7)
It should be noted that Walsh’s surrogate model can
be viewed as a linear regression in a specific Hilber-
tian space.
4.2.2 One-Hot Encoded Boolean Representation
of the Search Space
We consider a one-hot encoded Boolean representa-
tion of any variable of x = (x
0
,x
1
,x
2
,x
3
,x
4
) using an
uniform partitioning of each range E
i
corresponding
to the domain of the variable x
i
(see tab. 1). We de-
fine for each variable x
i
a binary digit sequence of size
♯E
i
− 1 (see eq. 8) such that at most one digit is equal
to 1. More formally, let be (E
i j
) an uniform partition
of E
i
into ♯E
i
sets of equal cardinality : E
i
=
S
♯E
i
j=0
E
i j
,
and E
i j
1
∩E
i j
2
=
/
0 for any j
1
̸= j
2
. The proposed one-
hot encoded strategy follows two rules (eq. 9). Firstly
the unique digit sequence with no 1 corresponds to
E
i
’s first element
2
, secondly other elements are linked
to sequences that have exactly one 1 ; its position is
given by the value x
i
: if x
i
∈ E
i j
for j ∈ [1, ♯E
i
], then
the digit 1 is positioned at index j − 1 in the boolean
sequence. Other digits equal to 0.
h
i
: E
i
→
{
0,1
}
♯E
i
x
i
7→
x
i 0
,...,x
i(♯E
i
−1)
(8)
∀ j ∈ [♯E
i
− 1],x
i j
=
(
1 if x
i
∈ E
i( j+1)
0 otherwise.
(9)
The one-hot encoded Boolean representation
of the whole variable x = (x
1
,...,x
5
) results
from the concatenation of one-hot encoded
sequences corresponding to each variable x
i
:
h(x) = (h
0
(x
0
),h
1
(x
1
),...,h
4
(x
4
)).
Example : let x = (185, 175, 27, 4, 36) a ran-
dom element of X . If ♯E
i
= 4 for all i then
2
All sets E
i
are sorted in ascending order so that con-
sidering the first element of E
i
makes sense.
ECTA 2023 - 15th International Conference on Evolutionary Computation Theory and Applications
80

for instance the uniform partitioning of r
1
pa-
rameter domain is E
0
= [255] = [63] ∪ [64,127] ∪
[128,191] ∪ [192, 255], which means that h(x
0
) =
(0010). Following this schemata with other subvari-
ables the complete Boolean sequence of x would be
(0010 0010 1000 1000 0001).
Such a one-hot encoded representation is common
with previous work proposed recently in (Dadkhahi
et al., 2022), used for Boolean Fourier representation
of any categorical variable. It is very practical as we
can remove many terms in the expression of f (x) (eq.
7) ; indeed, for any sub-variable x
i
, Walsh terms or
order n ≥ 2 involving more than two elements of the
same family (x
i j
) are inconsistent. Considering that
NUCOP is a d = 5 dimension problem (tab. 1) :
f (x)=ω
0
+
d
∑
n=1
∑
I∈
[1,d]
n
∑
J∈
×
♯I
c=1
[
♯E
I
c
−1
]
ω
I,J
W
I,J
(x) (10)
where
[1,d]
n
is the set of subsets of cardinal n drawn
from the set [1, d] and
×
♯I
c=1
[♯E
I
c
− 1] is the carte-
sian product of all integer sets [♯E
I
c
− 1] with I
c
tak-
ing values in [1, d] according to the sum term explor-
ing each n-subset previously defined. Finally, Walsh
functions W
I ,J
are given by
W
I ,J
(x) =
∏
(i, j)=(I
c
,J
c
)
with c∈J1,#I K
(−1)
x
i j
. (11)
As mentioned in equation (7) we can sort the terms of
the series (10) according to their contribution in lin-
ear or interaction effects within the linear regression
equation that defines Walsh surrogate model. First-
order terms of (10) are all those whose Walsh function
W
I ,J
(x) involves a single x
i j
; second-order terms are
terms containing two terms in the product (11) ; and
so forth. We can write the truncated expansion
ˆ
f (x)
of f (x) at order n = 2 by the Walsh decomposition
given in (10) :
ˆ
f (x) =
ˆ
ω
0
+
∑
i∈[1,5]
∑
j∈[♯E
i
−1]
ˆ
ω
i j
(−1)
x
i j
+
∑
(i,i
′
)∈
J1, 5K
n
∑
( j, j
′
)∈[♯E
i
−1]×
[
♯E
i
′
−1
]
ˆ
ω
i j,i
′
j
′
(−1)
x
i j
+x
i
′
j
′
(12)
Example : consider a Walsh decomposition model
based on x
4
and x
5
sub-variables of the NUCOP
search space. Let’s partition E
4
and E
5
with cardi-
nality ♯E
4
= 2 and ♯E
5
= 3 respectively. Approxima-
tion (12) of f (x) gives :
ˆ
f (x)=
ˆ
ω
0
+
ˆ
ω
4,0
(−1)
x
4,0
+
ˆ
ω
4,1
(−1)
x
4,1
+
ˆ
ω
5,0
(−1)
x
5,0
+
ˆ
ω
5,1
(−1)
x
5,1
+
ˆ
ω
5,2
(−1)
x
5,2
+
ˆ
ω
4,0,5,0
(−1)
x
4,0
+x
5,0
+
ˆ
ω
4,0,5,1
(−1)
x
4,0
+x
5,1
+
ˆ
ω
4,0,5,2
(−1)
x
4,0
+x
5,2
+
ˆ
ω
4,1,5,0
(−1)
x
4,1
+x
5,0
+
ˆ
ω
4,1,5,1
(−1)
x
4,1
+x
5,1
+
ˆ
ω
4,1,5,2
(−1)
x
4,1
+x
5,2
. (13)
Following semantics proposed in (Dadkhahi et al.,
2022), we refer to the tuple (x
i j
)
j∈[♯E
i
−1]
as the de-
scendant of the parent variable x
i
of the solution x ∈
X . The completeness and uniqueness of the decom-
position (10) is justified by the fact that each W
I ,J
(x)
contains exactly one x
i j
descending from the parent
variable x
i
. The proof is given in Appendix of (Dad-
khahi et al., 2022).
4.3 Walsh Adaptive Method
As MOEA/D is an evolutionary algorithm, the mu-
tation step involves the use of a selection and a mu-
tation operator. Given a evaluated solution x and a
mutation rate vector P = (P
1
,...,P
5
)
T
, the first one
performs a Bernoulli test with an expectancy value
of P
i
on each variable x
i
of x, so that sub-variable x
i
is mutated into ˜x
i
iff the test succeeds. Usually, P is
fixed such as each sub-variable has the same prob-
ability to mutate, which means that each P
i
equals
to 1/d = 0.2. The second one is based on a vector
R = (R
1
,...,R
5
)
T
such that all mutated variables ˜x
i
are
chosen thanks to an uniform distribution in the real in-
terval [x
i
− R
i
⌊
ub
i
− lb
i
⌋
,x
i
+ R
i
⌊
ub
i
− lb
i
⌋
], with ub
i
and lb
i
respectively being the upper bound and lower
bound values of x
i
.
Our adaptive method is based on an evolutionary
selection operator where vector P is regularly updated
during a run, following the evolution of the Walsh sur-
rogate model coefficients. In this study, P updates
occur once all worker processors deployed for a run
of NUCOP resolution have returned a solution to the
master processor. The adaptive procedure starts by
computing the current Pareto optimal solutions that
will be used as the sample base for training the surro-
gate model. Then we use python library Scikit-Learn
(Pedregosa et al., 2011) to build a surrogate for each
one of the objectives under study, which consists in a
linear regression fit using Lasso interpolator. As men-
tioned in (Lepr
ˆ
etre et al., 2019) the use of Lasso is
motivated by the high number of Walsh coefficients
in the decomposition, as it relies on the choice of
the partitioning mesh of each E
i
set. For instance, if
eight sets make a partition of the interval E
0
= [255],
MOEA/D with Adaptive Mutation Operator Based on Walsh Decomposition: Application to Nuclear Reactor Control Optimization
81

there will be a family (
ˆ
ω
1, j
)
j∈[7]
of eight coefficients
associated with parameter r
1
in the Walsh surrogate
model. After fitting the surrogate we get access to
all Walsh coefficients that can be separated accord-
ing to the sub-variable they correspond with : taking
the L1-norm on coefficients linked to the same x
i
, we
perform a normalization by the L1-norm of all Walsh
surrogate coefficients (except for ω
0
which a constant
term). This reasoning leads to the calculation of two
new selection vectors
˜
P
f
1
and
˜
P
f
2
respectively for ob-
jective f
1
and f
2
, that involves a learning rate coeffi-
cients denoted l. For instance, in the case of objective
f
1
:
P
f
1
=
(1 − l)P
f
1
,i
+ l
˜
P
f
1
,i
,∀i ∈ [4]
. (14)
The learning rate parameter influence the importance
given to the modification of P
f
1
during iterations. In
this study, we have taken l = 0.2 for all runs because
of limited computational resources, but with more
computational budget it would possible to carry out
a parametric study on this parameter in order to as-
sess its effects on the study proposed here. We use
˜
P
f
1
and
˜
P
f
2
to update regularly the mutation rate vec-
tor of MOEA/D such as it is given by :
P =
(1 − l)P
i
+ l
˜
P
f
1
,i
+
˜
P
f
2
,i
2
,∀i ∈ [4]
. (15)
The underlying idea is to progressively favor the se-
lection of variables whose mutation is expected to
have more pronounced effects on the results given
by the black-box function. In short, we take advan-
tage of the interpretation of the coefficients which im-
pact more the objective values in a linear regression
to adapt the selection operator of MOEA/D (see alg.
3).
Algorithm 3: Adaptive mutation operator.
1 Receive x
⋆
λ
p
;
2 if n
mut
modulo M = 0 then
3 Fit Walsh surrogate model for each
objective of NUCOP with all known
solution ;
4 Update mutation rate P following
equation (15) ;
5 end
6 x
′
← Mutate x
⋆
λ
p
obtained with fixed
mutation range vector R and new P ;
7 n
mut
← n
mut
+ 1;
5 EXPERIMENTAL ANALYSIS
5.1 Experimental Setup
The experimental setup is as follows. We use 600
computational processors, distributed over 200 direc-
tions decomposing the objective space (3 per direc-
tion). The neighborhood of a direction is equal to the
total number of directions in the problem to enable
a total communication between directions following
recommendations of previous works working on the
optimization of rod parameters (Muniglia et al., 2018;
Drouet et al., 2020b). We use Chebyshev’s scalariza-
tion function to evaluate the dominance of one solu-
tion over another in the objective space. For each raw
fit from the controlling simulator, we center-reduce
the fit according to a normal distribution N (µ, σ)
whose parameters are derived from a totally random
sampling of the search space upstream of the NUCOP
optimization study. The proposed adaptive mutation
operator method is denoted AMOW for adaptive mu-
tation operator based on Walsh decomposition, and it
compared the baseline method FMO for fixed muta-
tion operator. The AMOW method updates the mu-
tation operator every M = 600 evaluated solutions.
We train a Walsh surrogate model by evaluating cur-
rent non-dominated solutions that are taken to build a
training dataset with the corresponding fitness values
as training targets. Each sample in the dataset is then
expressed as a feature of five features (r
1
, r
2
, b, d
1
and
d
2
) and two targets ( f
1
and f
2
). The construction of
the Walsh predictors made of all W
I ,J
leads to a non-
orthogonal and non-normal basis : as shown on figure
3 the transformation of the base vectors through the
Gram Schmidt algorithm slightly decreases the mean
absolute error observed on both objectives ; thus, re-
sults presented in the rest of this study were obtained
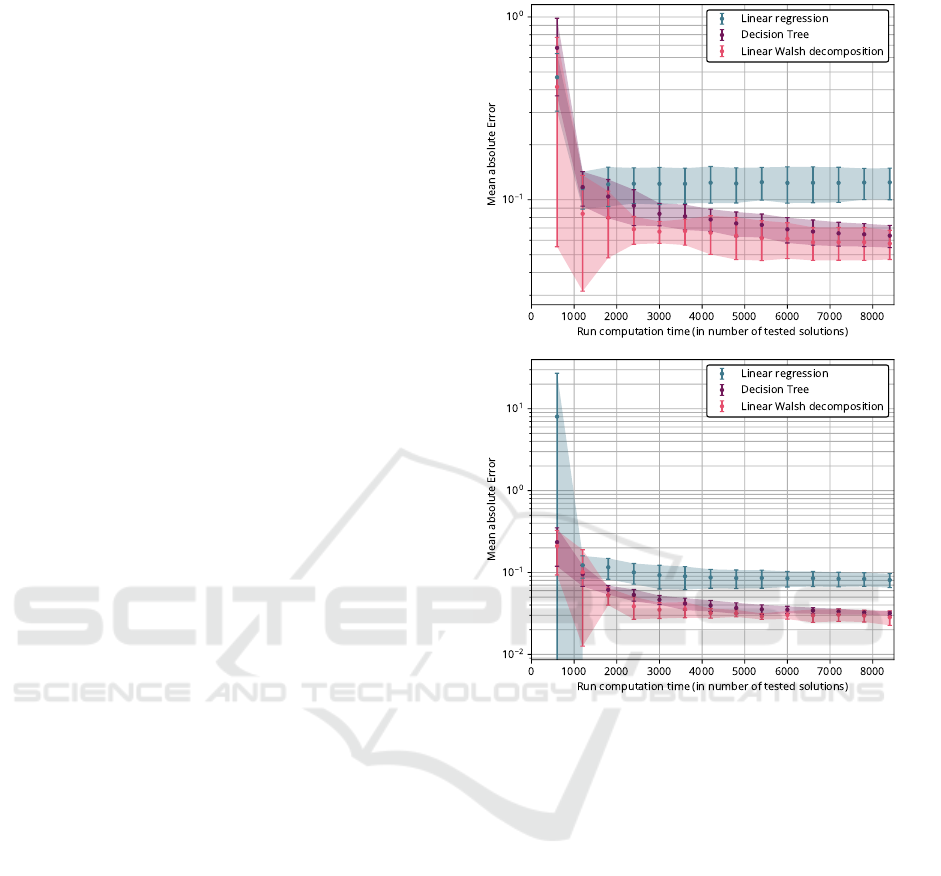
with the orthonormal basis of Walsh functions. It
should be noted that Walsh surrogate has similar per-
formance as decision tree method ; in any case such
a method is rejected as it does not give access to the
individual contribution of each research space’s sub-
variable.
We perform 10 runs that computes 9000 solutions
each. The performance assessment protocol is such
that we compare two by two runs that begin with
the same initial population given by an latin hyper-
cube sampling of the search space (see table 1 for
dimensions). In other words, there are 10 different
runs for each method FMO and method AMOW, and
we use only ten different population samples to be-
gin the each run. Performance indicators are given as
the mean value observed on all runs. Concerning the
NUCOP problem, we study a fleet of two reactors :
ECTA 2023 - 15th International Conference on Evolutionary Computation Theory and Applications
82
one reactor has got fresh fuel whereas the other one
is at the middle of its fuel campaign. Calculations are
performed at the TGCC on Intel Skylake AVX-512
2.7GHz CPU units (GENCI, 2023).
5.2 Performance Analysis
Figure 4 shows the evolution of the coordinates of the
mutation rate vector P during the run. The optimiza-
tion process progressively reduces the probability that
b and r
2
sub-variables will be mutated for the next 600
iterations, thus favoring mutation of the other sub-
variables. In other words, we take advantage of a
quantification of the linear effect induced by variation
of b on objectives thanks to Walsh’s model that priv-
ilege mutation of the other parameters with the hope
of exploring the fitness landscape more effectively. In
the field of nuclear reactor physics for power maneu-
vering, this result shows that there is less expected im-
provement in searching for the best width of the ma-
neuvering strip of TRG rods than in changing other
variables like rod overlaps and fleet transient’s distri-
bution. The physical interpretation of these interac-
tions belongs to the field of reactor physics that are
beyond the scope of this current study.
One notable result is that decreasing the chances
of mutating variable b does not seem to have much
impact on the diversity of solutions in the compromise
zone between the two objectives (figure 6). We be-
lieve the use of AMOW makes it possible to progres-
sively remove a variable from the NUCOP problem if
it turns out that its mutations are not likely to cause
a large variation of the black-box function, without
leading to a great loss of potential non-dominated so-
lutions. In the formalism of linear regression, this
amounts to discarding the terms with the weakest
main effects. Figure 6 also shows that best solutions
minimizing absolutely f
1
or f
2
were done with the
AMOW method. However these results must be qual-
ified to the extent that most of the metrics usually used
for the comparison of optimization method seems to
favour the FMO non-adaptive method (hypervolume
metric is presented on figure 5). However, a Welsch t-
test made on the hypervolume metric gives a p-value
of 0.2606 meaning that we cannot statistically state
that either method leads to better performance on the
hypervolume metric. The use of AMOW seems more
relevant to get a better comprehension of the physics
of the fitness function by reducing the search space
than for hoping to achieve a better approximation of
the optimal Pareto front.
Figure 3: Mean absolute error on f
1
(top) and f
2
(bottom)
obtained from different surrogate methods during a run.
The training dataset is updated each 600 tested solutions.
Points stand for mean values over all runs whereas shaded
areas stand for the 1σ confidence interval (note that y-axis
scale is logarithmic so mean values are not centered in error
bars).
6 CONCLUSION AND
PERSPECTIVES
Modeling a nuclear reactor is complex and simulating
load following operations is costly in terms of com-
puting time. The joint optimization of the control rod
overlap settings, TRG maneuvering bandwidth and
the distribution of a fleet transient over a group of
two reactors is an innovative problem whose resolu-
tion leads to new considerations on the possible gains
in nuclear power maneuverability. In this context, we
have implemented within a MOEA/D algorithm an
adaptive mutation rate based on a decomposition of
the fitness function in the basis of Walsh functions.
This method favours the mutation of variables most
MOEA/D with Adaptive Mutation Operator Based on Walsh Decomposition: Application to Nuclear Reactor Control Optimization
83
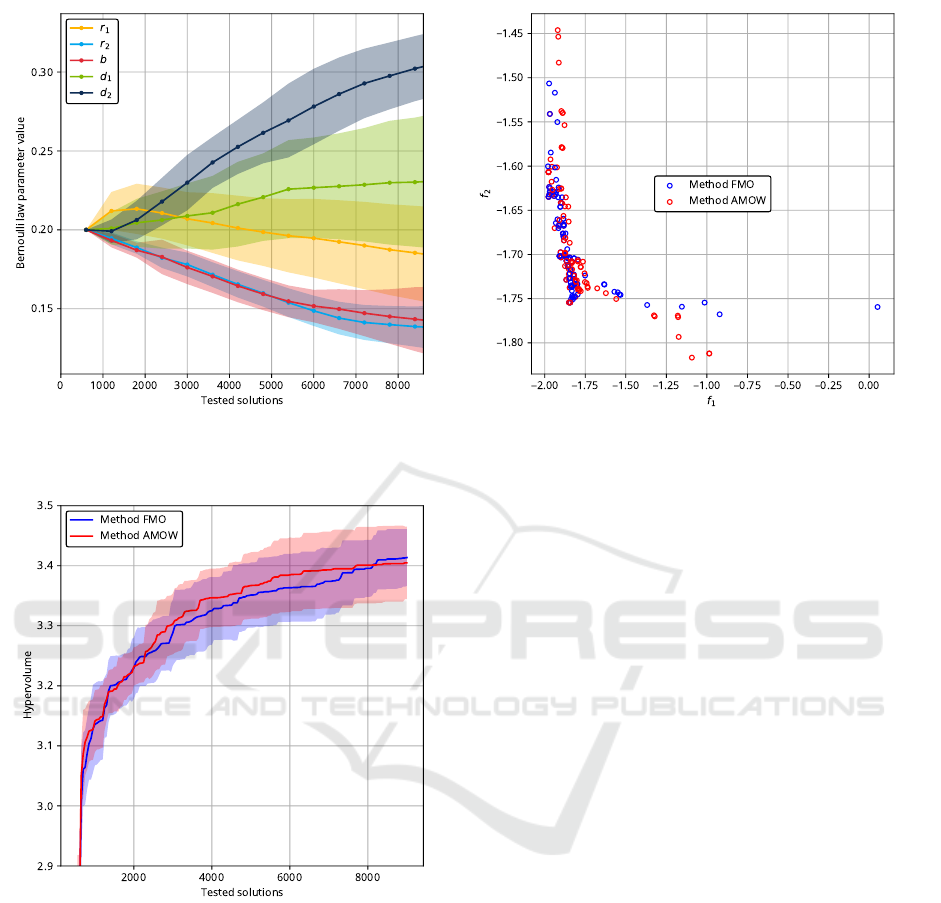
Figure 4: Evolution of mutation rate vector’s coordinates
during the run, using method AMOW. Interpretations of
points and shaded areas is the same as in the figure 3.
Figure 5: Evolution of hypervolume referenced to the ori-
gin of the objective space for method FMO (fixed mutation
operator) and AMOW (adaptive mutation operator based on
Walsh decomposition). Hypervolume was computed thanks
to the library (L
´
opez-Ib
´
a
˜
nez et al., 2010). Interpretations of
points and shaded areas is the same as in the figure 3.
likely to lead to greater goal variation at the expense
of those contributing least to the problem, as if a fit-
ness landscape analysis is made in-line instead of be-
ing done before the optimization process. Naturally,
the adaptive method using the surrogate model is not
limited to load following operation in nuclear energy
context. Future works will test the proposed adaptive
method to others discrete expensive problems. Future
research works may involve developing an adaptive
Figure 6: Pareto fronts for all runs (method FMO in blue,
method AMOW in red).
mutation operator up to the second order of the Walsh
series decomposition, to take advantage of knowledge
of the interactions between variables in the problem,
and moreover mutation operators which mutate sev-
eral variables could also be designed in order to in-
crease the convergence rate of the optimization algo-
rithms for larger dimension problems.
ACKNOWLEDGEMENTS
Authors would like to thank the GENCI project for
access to the CCRT’s computing resources, which
were used during allocation campaign A0131013043
(GENCI, 2023).
REFERENCES
Bethke, A. D. (1980). Genetic algorithms as function opti-
mizers. PhD thesis, University of Michigan.
Cany, C., Mansilla, C., Mathonni
`
ere, G., and da Costa, P.
(2018). Nuclear contribution to the penetration of
variable renewable energy sources in a french decar-
bonised power mix. Energy, 150:544–555.
Cruz-Salinas, A. F. and Perdomo, J. G. (2017). Self-
adaptation of genetic operators through genetic pro-
gramming techniques. In Proceedings of the Genetic
and Evolutionary Computation Conference. ACM.
Dadkhahi, H., Rios, J., Shanmugam, K., and Das, P. (2022).
Fourier representations for black-box optimization
over categorical variables. Proceedings of the AAAI
Conference on Artificial Intelligence, 36(9):10156–
10165.
ECTA 2023 - 15th International Conference on Evolutionary Computation Theory and Applications
84

Denholm, P. and Hand, M. (2011). Grid flexibility and stor-
age required to achieve very high penetration of vari-
able renewable electricity. Energy Policy, 39(3):1817–
1830.
Derbel, B., Pruvost, G., Liefooghe, A., Verel, S., and
Zhang, Q. (2023). Walsh-based surrogate-assisted
multi-objective combinatorial optimization: A fine-
grained analysis for pseudo-boolean functions. Ap-
plied Soft Computing, 136:110061.
Drouet, V., Do, J.-M., and Verel, S. (2020a). Optimization
of load-follow operations of a 1300mw pressurized
water reactor using evolutionnary algorithms. In In-
ternational Conference on Physics of Reactors: Tran-
sition to a Scalable Nuclear Future (PHYSOR 2020),
volume 247, pages 1–8/11001.
Drouet, V., Verel, S., and Do, J.-M. (2020b). Surrogate-
assisted asynchronous multiobjective algorithm for
nuclear power plant operations. In Proceedings of the
2020 Genetic and Evolutionary Computation Confer-
ence, GECCO ’20, page 1073–1081, New York, NY,
USA. Association for Computing Machinery.
GENCI (2023). http://www.genci.fr/.
Grard, H. (2014). Physique, fonctionnement et s
ˆ
uret
´
e des
REP : Le r
´
eacteur en production. EDP Sciences.
Jenkins, J., Zhou, Z., Ponciroli, R., Vilim, R., Ganda, F., de
Sisternes, F., and Botterud, A. (2018). The benefits
of nuclear flexibility in power system operations with
renewable energy. Applied Energy, 222:872–884.
Ju, Y., Wang, J., Ge, F., Lin, Y., Dong, M., Li, D., Shi,
K., and Zhang, H. (2019). Unit commitment accom-
modating large scale green power. Applied Sciences,
9(8).
Lepr
ˆ
etre, F., Verel, S., Fonlupt, C., and Marion, V. (2019).
Walsh functions as surrogate model for pseudo-
boolean optimization problems. In The Genetic
and Evolutionary Computation Conference (GECCO
2019), Proceedings of the Genetic and Evolution-
ary Computation Conference, pages 303–311, Prague,
Czech Republic. ACM.
L
´
opez-Ib
´
a
˜
nez, M., Paquete, L., and St
¨
utzle, T. (2010).
Exploratory analysis of stochastic local search al-
gorithms in biobjective optimization. In Bartz-
Beielstein, T., Chiarandini, M., Paquete, L., and
Preuss, M., editors, Experimental Methods for the
Analysis of Optimization Algorithms, pages 209–222.
Springer, Berlin, Germany.
Mahfudin, I., Ardiyanto, I., and Cahyadi, A. I. (2022).
Auto-tuning pid controller for nuscale nuclear reactor
using point reactor kinetics model simulator. In 2022
9th International Conference on Information Tech-
nology, Computer, and Electrical Engineering (ICI-
TACEE), pages 7–12.
Muniglia, M., Do, J.-M., Jean-Charles, L. P., Grard, H.,
Verel, S., and David, S. (2016). A multi-physics
pwr model for the load following. In Interna-
tional Congress on Advances in Nuclear Power Plants
(ICAPP).
Muniglia, M., Verel, S., Le Pallec, J.-C., and Do, J.-M.
(2018). A fitness landscape view on the tuning of
an asynchronous master-worker ea for nuclear reactor
design. In Artificial Evolution, pages 30–46. Springer
International Publishing.
O’Donnell, R. (2021). Analysis of boolean functions.
Pedregosa, F., Varoquaux, G., Gramfort, A., Michel, V.,
Thirion, B., Grisel, O., Blondel, M., Prettenhofer,
P., Weiss, R., Dubourg, V., Vanderplas, J., Passos,
A., Cournapeau, D., Brucher, M., Perrot, M., and
Duchesnay, E. (2011). Scikit-learn: Machine learning
in Python. Journal of Machine Learning Research,
12:2825–2830.
Prieto, J. and G
´
omez, J. (2020). Hybrid adaptive evolution-
ary algorithm for multi-objective optimization. ArXiv,
abs/2004.13925.
Qi, Y., Ma, X., Liu, F., Jiao, L., Sun, J., and Wu, J. (2014).
MOEA/D with Adaptive Weight Adjustment. Evolu-
tionary Computation, 22(2):231–264.
Rafiei, M., Ansarifar, G., Hadad, K., and Mohammadi, M.
(2021). Load-following control of a nuclear reactor
using optimized fopid controller based on the two-
point fractional neutron kinetics model considering re-
activity feedback effects. Progress in Nuclear Energy,
141:103936.
Shim, V. A., Tan, K. C., and Tan, K. K. (2012). A hybrid
adaptive evolutionary algorithm in the domination-
based and decomposition-based frameworks of multi-
objective optimization. In 2012 IEEE Congress on
Evolutionary Computation, pages 1–8.
Verel, S., Derbel, B., Liefooghe, A., Aguirre, H., and
Tanaka, K. (2018). A surrogate model based on walsh
decomposition for pseudo-boolean functions. In Par-
allel Problem Solving from Nature – PPSN XV, pages
181–193, Cham. Springer International Publishing.
Walsh, J. L. (1923). A closed set of normal orthogonal func-
tions. American Journal of Mathematics, 45:5–24.
Xu, Y., Wang, Z., Sun, W., Chen, S., Wu, Y., and Zhao, B.
(2011). Unit commitment model considering nuclear
power plant load following. APAP 2011 - Proceed-
ings: 2011 International Conference on Advanced
Power System Automation and Protection, 3.
Zeng, W., Jiang, Q., Xie, J., and Yu, T. (2020). A functional
variable universe fuzzy pid controller for load follow-
ing operation of pwr with the multiple model. Annals
of Nuclear Energy, 140:107174.
Zhang, Q. and Li, H. (2007). Moea/d: A multiob-
jective evolutionary algorithm based on decomposi-
tion. IEEE Transactions on evolutionary computation,
11(6):712–731.
MOEA/D with Adaptive Mutation Operator Based on Walsh Decomposition: Application to Nuclear Reactor Control Optimization
85
