
Recognition and Position Estimation of Pears in Complex Orchards
Using Stereo Camera and Deep Learning Algorithm
Siyu Pan
1
, Ayanori Yorozu
2
, Akihisa Ohya
2
and Tofeal Ahamed
3
1
Graduate School of Science and Technology, University of Tsukuba, 1-1-1 Tennodai, Tsukuba 305-8573, Japan
2
Institute of Systems and Information Engineering, University of Tsukuba, Tsukuba, Japan
3
Faculty of Life and Environmental Science, University of Tsukuba, Tsukuba, Japan
Keywords:
Pear Recognition, Position Estimation, Stereo Camera.
Abstract:
Complex orchards present difficulties for fruit-picking robots due to shadows, overlapping fruits, and ob-
structing branches, resulting in errors during grasping. To improve the robustness of fruit-picking robots in
the complex environment, this study compared the performance of different types of deep learning algorithms
(Mask R-CNN, Faster R-CNN, and YOLACT) for pear recognition under different conditions (high and low
light). Additionally, the ZED2 stereo camera with the algorithm of the highest precision for estimating the
position of separating and aggregating pears. For pear recognition, the mAPs of Mask R-CNN were 95.22%
and 99.45%, Faster R-CNN were 87.90% and 87.52%, YOLACT were 87.07% and 97.89% in the validation
and test set. For position estimation, the mean error of separating pears was 0.017m, the standard deviation
was 0.015m and the goodness of fit reached 0.896; The mean error of aggregating pears were 0.018m and
the standard deviation was 0.021m and the goodness of fit reached 0.832. A pear recognition and positioning
system was developed by ZED2 stereo camera with deep learning algorithm. It aimed to generate precise
bounding boxes and recognize pears in a complex orchard within the range of 0.1 to 0.5m. The mean error of
separating pears and less than 0.27m for aggregating pears. This demonstrated the system’s capability to ac-
curately position and differentiate between individual pears and clusters in challenging orchard environments.
1 INTRODUCTION
Modern fruit harvesting is still predominantly con-
ducted manually throughout the different regions of
the world. Among common fruits, the Japanese
pear (such as Pyrus pyrifolia Nakai) is one of the
most widely grown fruit in Japan(Saito, 2016).be-
cause of the shortage of labor in harvesting season,
the cost of pear picking has gradually increased. With
the development of computer science in agriculture,
modern agricultural technology has gradually evolved
from manual planting and picking to full automation
and intelligence.The recognition and positioning of
pears in complex orchards becomes a prerequisite for
the development of fruit picking robots. Overtime,
most countries in the world have developed intelli-
gent picking robots through different methods and
techniques to load and unload agricultural products
and detect fruit and positioning issues (Bechar and
Vigneault, 2016).The recognition and positioning of
a certain number of pears in a complex orchard be-
comes the focus of this research.
However, due to the complexity of the orchard en-
vironment, the precise recognition and localization of
each pear by the robot in order to improve the robust-
ness of the robot to the environment has become a
major research challenge. Deep learning with convo-
lutional neural networks was widely used for image
processing tasks, allowed detection of objects wher-
ever positioned in an image and extracted complex vi-
sual concepts(Koirala et al., 2019). Especially in agri-
cultural field, the detection and classification of differ-
ent fruits were applied based on CNN (Zhang et al.,
2019). In the realm of traditional image processing
algorithms in deep learning algorithms, pears within
orchards can be effectively recognized. These algo-
rithms leverage multiple vision sensors, enabling the
detection of fruits with high accuracy (Sa et al., 2016).
This paper chose three typical CNN-based deep learn-
ing algorithms to recognize the pears in complex or-
chard.
Due to the different focuses of the three algo-
rithms, Faster R-CNN focuses on an increase in speed
to recognize the objects, while Mask R-CNN favors
632
Pan, S., Yorozu, A., Ohya, A. and Ahamed, T.
Recognition and Position Estimation of Pears in Complex Orchards Using Stereo Camera and Deep Learning Algorithm.
DOI: 10.5220/0012179200003543
In Proceedings of the 20th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2023) - Volume 1, pages 632-639
ISBN: 978-989-758-670-5; ISSN: 2184-2809
Copyright © 2023 by SCITEPRESS – Science and Technology Publications, Lda. Under CC license (CC BY-NC-ND 4.0)
the separation of individual pears. And YOLACT
(Bolya et al., 2019) provides an increase in speed
with the separation of individual pears. By employ-
ing the Faster R-CNN (Girshick, 2015), which is a
two-stage object detection method and only gener-
ates the bounding boxes in recognition, cameras pre-
cisely recognize individual pears even when the pears
are densely clustered together. This aids in facilitat-
ing the subsequent picking of the recognized pears.
YOLACT is a real-time instance segmentation algo-
rithm which was employed for the recognition of
pears by robots. And YOLACT is functioned as a
one-stage method, swiftly generates bounding boxes
and masks for the rapid recognition of pears. Mask
R-CNN (He et al., 2017), as another two-stage in-
stance segmentation method uses intra-station seg-
mentation, it over-detects different individuals of the
same species, so that overlapping parts of fruits are
detected accurately and shape variations are adjusted
to improve recognition accuracy.
Furthermore, the position estimation of the or-
chard pears is indispensable, the distance from the
pears to the camera provides the reference coordinates
for fruit picking robot to grab. ZED2 stereo camera
provides a platform can be for the position estimation
of the recognized pears. However, the irregular ag-
gregation of pears adds difficulty to the position es-
timation. The camera needs to acquire the precise
bounding box coordinates of the recognized pears in
the complex orchard, This allows for the calculation
of the coordinates of the centroid, which in turn helps
determine the distance between this point and the left
lens of the ZED2 stereo camera.
Therefore, to enhance the robustness in unstable
environments of pear recognition and position estima-
tion in complex orchards, a more accurate method for
pear recognition and position is developed for fruit-
picking robots. This helps avoid misgrasping of pears
by robots and reduce the reliance on labor for agri-
cultural operations. In this paper, three different deep
learning algorithms are compared to assess the accu-
racy of pear recognition, aim to select one algorithm
with the lowest recognition error and the highest ac-
curacy of generated bounding box and mask for pears
in complex orchards. This chosen algorithm can be
combined with the ZED2 stereo camera for accurate
position estimation.
2 METHODOLOGY
2.1 System Overview
An overview of the proposed framework was shown
in (Figure.1). This paper chose the moving
robot named SCOUT MINI developed by AGILEX
ROBOTICS to be equipped with ZED2 stereo cam-
era. and the angle of mechanical grip was simulated
to recognize pears in complex orchards to measure
the distances of pears. This paper was divided into
two parts, the first part tested the recognition perfor-
mance of different deep learning algorithms in sep-
arating pears and aggregating pears in complex or-
chards, and selected the deep learning algorithm with
the highest mean average precision for pear recog-
nition. The second part evaluated the distance error
of the ZED2 camera for separating and aggregating
pears already identified by the first part under differ-
ent light intensities.
2.2 Data Preparation
A stereo camera named ZED2 (Stereolabs Inc.
San Francisco, CA, USA) was utilized to cap-
ture 3018 original images from the T-PIRC
(36
◦
07
′
04
′′
N,140
◦
05
′
45
′′
E), and measured dis-
tance from the pear was less than 0.5m. Considering
the influences of different light conditions effected
the results, the data were collected at 9:00-10:00
am and 6:00–7:00 pm at Tsukuba-Plant Innovation
Research Center (T-PIRC). Among these datasets,
there were 1818 images used for training, 900 images
for validation, and 300 images for testing with the
proportion of 6:3:1.(Table.1)
Table 1: Dataset collection times and light conditions.
Date Time Light Condition
24 August 2021 9:00-10:00 High Light
24 August 2021 18:00-19:00 Low Light
Pears and leaves exhibited similar shapes under
low light conditions, the dataset underwent augmenta-
tion through the inclusion of inverted and rotated im-
ages. This manipulation resulted in pears appearing
spherical from various angles, in contrast to the dis-
tinct shapes exhibited by leaves. Consequently, the
dataset was expanded to comprise a training set of
5454 images, a validation set of 2700 images, and a
test set of 900 images.(Table.2)
Recognition and Position Estimation of Pears in Complex Orchards Using Stereo Camera and Deep Learning Algorithm
633

Figure 1: The overview of pear recognition and position estimation in complex orchard.
Table 2: The Amount of dataset in different set.
Images training validation testing
Original 1818 900 300
Augmentation 3636 1800 600
Total 5454 2700 900
2.3 Pear Recognition with Deep
Learning Algorithms
Faster R-CNN is composed of two modules used by
VGG-16 backbone network: a Region Proposal Net-
work(RPN) (Girshick, 2015), used for detection of
RoIs in the images followed by 2) a classification
module, which classifies the individual regions and
regresses a bounding box around the objects. (Bar-
goti and Underwood, 2017). YOLACT as a real-time
instance segmentation model, which not only per-
forms target detection but also recognizes individual
targets under each identified category, is mainly im-
plemented through two parallel networks for strength
segmentation (Bolya et al., 2019). And Mask R-
CNN is an instance segmentation method, which is
efficiently detected objects in images while gener-
ating high-quality segmentation masks for each in-
stance (He et al., 2017). Mask R-CNN extended the
Faster R-CNN by mask branch at the end of the model
(Girshick et al., 2015). And ROI-Align is different
from ROI-Pooling (Girshick, 2015) in Fasetr R-CNN,
which cancels the quantization and used bilinear in-
terpolation (Kirkland and Kirkland, 2010) to obtain
the image values on pixel points with floating-point
coordinates (Figure.2). We compared the mean aver-
age presion (mAP) of Mask R-CNN, Faster R-CNN
and Yolact for pear recognition, and we chose Mask
R-CNN as the subsequent recognition method used
for pear position estimation.
2.4 Pear Position Estimation
The ZED2 stereo camera has been applied to target
reconstruction, position acquisition, and other fields
(Tran et al., 2020), it simulated and emulated the
imaging principle of the human eyes, which perceives
differences (depth) between images formed from the
right and left eyes (Ortiz et al., 2018). To generate the
depth image, stereo camera utilizes two RGB cam-
eras to capture images of the same scene from differ-
ent positions. The 3D position is calculated through
triangulation based on corresponding points found on
both images (Condotta et al., 2020).
Mask R-CNN was used to generate precise bound-
ing boxes and masks, by adjusting the median around
the bounding box to achieve a relatively precise co-
ordinate value, the spatial location of the pears was
identified.The left images were acquired by the left
lens, showed the detection and measurement infor-
mation in the real situation. And the right depth im-
ages were acquired by the parallax between the left
lens and the right lens, showed the depth information.
Typically, darker colors (black) in the depth images
indicated more distant objects, while brighter colors
(white) indicated closer objects (Figure.3).
The spatial correspondence between the pixel
ICINCO 2023 - 20th International Conference on Informatics in Control, Automation and Robotics
634
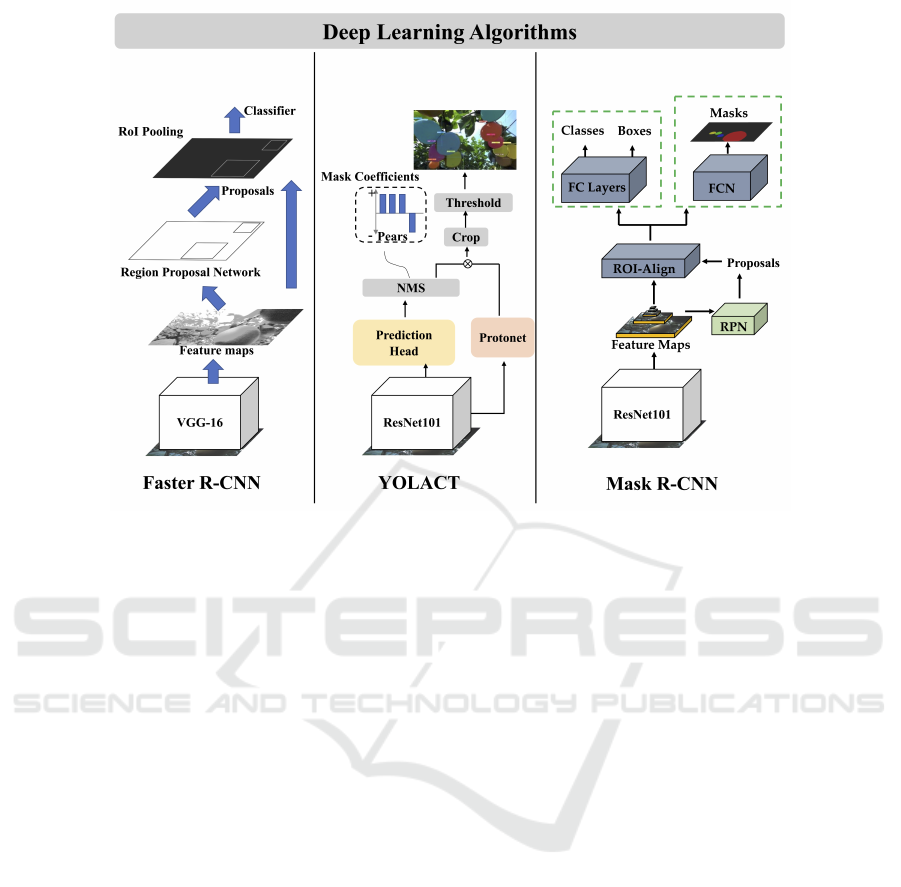
Figure 2: Pear Recognition using Different Deep Learning Algorithms.
plane of the pear and the camera is shown in
(Figure.4). P(x, y, z) was the spatial coordinates of
the pear centroid. By using the more accurate bound-
ing boxes generated by Mask R-CNN, the pixel co-
ordinates P
m
(x
m
, y
m
) of the centroid of the recognised
pear were calculated using the coordinates of the up-
per left and lower right corners P
0
(x, y) of the bound-
ing boxes, with the left lens of the ZED2 camera as the
origin O(0, 0, 0), and the centroid pixel coordinates of
the RGB image were matched with the depth image
obtained from the parallax. In the depth image, a 2×2
pixel block (ROI) was extracted with the centroid as
the center, the median value of the depth value in the
pixel block was calculated to z
m
, and finally the depth
value was converted to the 3D coordinates P(x, y, z) of
the center point of the pear.
3 RESULTS AND DISCUSSION
3.1 Training Details
The loss function was used to measure the gap be-
tween the model predictions and the actual labels.
L = L
RPN
+ L
MASK
L
RPN
= L
CLS
+ L
BOX
(1)
The L defined as training loss, and it included two
parts, which were defined as the loss of RPN networks
L
RPN
and the mask branches L
MASK
, and define L
MASK
as the average binary cross-entropy loss (He et al.,
2017). The L
CLS
and L
BOX
were defined as the classi-
fication loss and bounding box loss in RPN (Girshick,
2015). From the performance of the training results in
different learning rates, when the learning rate was set
to 0.001, the training loss (L) of models dropped to
0.3099 and the validation set loss dropped to 0.4637
in Mask R-CNN. We also compared the different loss
trends of the three deep learning algorithms for de-
tecting pears in training set and validation set. The
overall loss of Faster R-CNN and YOLACT both fell
below 0.2 after 40,000 training steps. The loss curves
demonstrated the applicability of the three models to
actual-world situations (Figure.5).
3.2 Evaluation of Model Metrics
In this paper, the Precision (P), Recall (R), Average
Precision (AP), and mean Average Precision (mAP)
were employed as the primary parameters to evaluate
the performance of different models. The weights ob-
tained from the training set after 80 epochs were used
to test and compared the performance on both the test
set and validation set, with an Intersection over Union
(IoU) threshold of 50%(Table.3).
With the IoU threshold of 50%, we compared the
overlap between the predicted bounding box and seg-
mentation mask with ground truth of bounding box
and mask. A prediction was classified as a true pos-
itive (TP) if the overlap exceeded 0.5. Conversely, a
Recognition and Position Estimation of Pears in Complex Orchards Using Stereo Camera and Deep Learning Algorithm
635

Figure 3: Depth images acquisition of ZED2 stereo camera.
Figure 4: Depth matching with deep learning algorithms.
Table 3: mAP(IoU=50%) results from 3D camera datasets
using Mask R-CNN, Faster R-CNN and YOLACT in the
testing set and validation set.
Model Validation Set Testing set
Faster R-CNN 87.90% 87.52%
YOLACT 87.07% 97.89%
Mask R-CNN 95.22% 99.45%
false positive (FP) was assigned when the predicted
category diverged from the actual category. Further-
more, a true negative (TN) was assigned when a cat-
egory not identified as a pear by the model. A false
negative (FN) was applied when the actual pears went
undetected (Missing box and mask) (Figure6).
Precision over-affected the proportion of correct
classification in the number of positive samples clas-
sified by the model. Recall was the ratio of the num-
ber of correct samples to the number of positive sam-
ples. Its expression was
Figure 5: Total losses of three deep learning models.
Figure 6: FP, TN, TP, and FN in pear recognition.
P =
T P
T P + FP
R =
T P
T P + FN
(2)
3.3 Evaluation of Model Effectiveness
By creating a dataset and deep learning models us-
ing a 3D stereo camera, we found the best weights
by comparing the fitting effect of Mask R-CNN,
Faster R-CNN and YOLACT at the same learning
rate of lr=0.001. Since the tested orchard was a
semi-enclosed structure, there was an indoor-like area
structure in the orchard and outdoor-like structure that
has direct exposure to sunlight. This paper compared
the different effects of separating pears and aggre-
gating pears under different lighting (strong and low
light) by testing 900 images of the test set taken at
different periods(Figure.7) (Figure.8).
This paper undertook a comparative analysis of
the Mean Average Precision (mAP) scores achieved
by the three deep learning algorithms on both the val-
idation and test datasets. Mask R-CNN attained an
impressive mAP of 95.22% on the validation set and
further exceled with a remarkable score of 99.45% on
the test set. In comparison, Faster R-CNN, another
two-stage algorithm akin to Mask R-CNN, marginally
trailed behind with a validation set mAP of 87.90%
ICINCO 2023 - 20th International Conference on Informatics in Control, Automation and Robotics
636
(a) Original image (b) Mask R-CNN
(c) Faster R-CNN (d) YOLACT
(e) Original image (f) Mask R-CNN
(g) Faster R-CNN (h) YOLACT
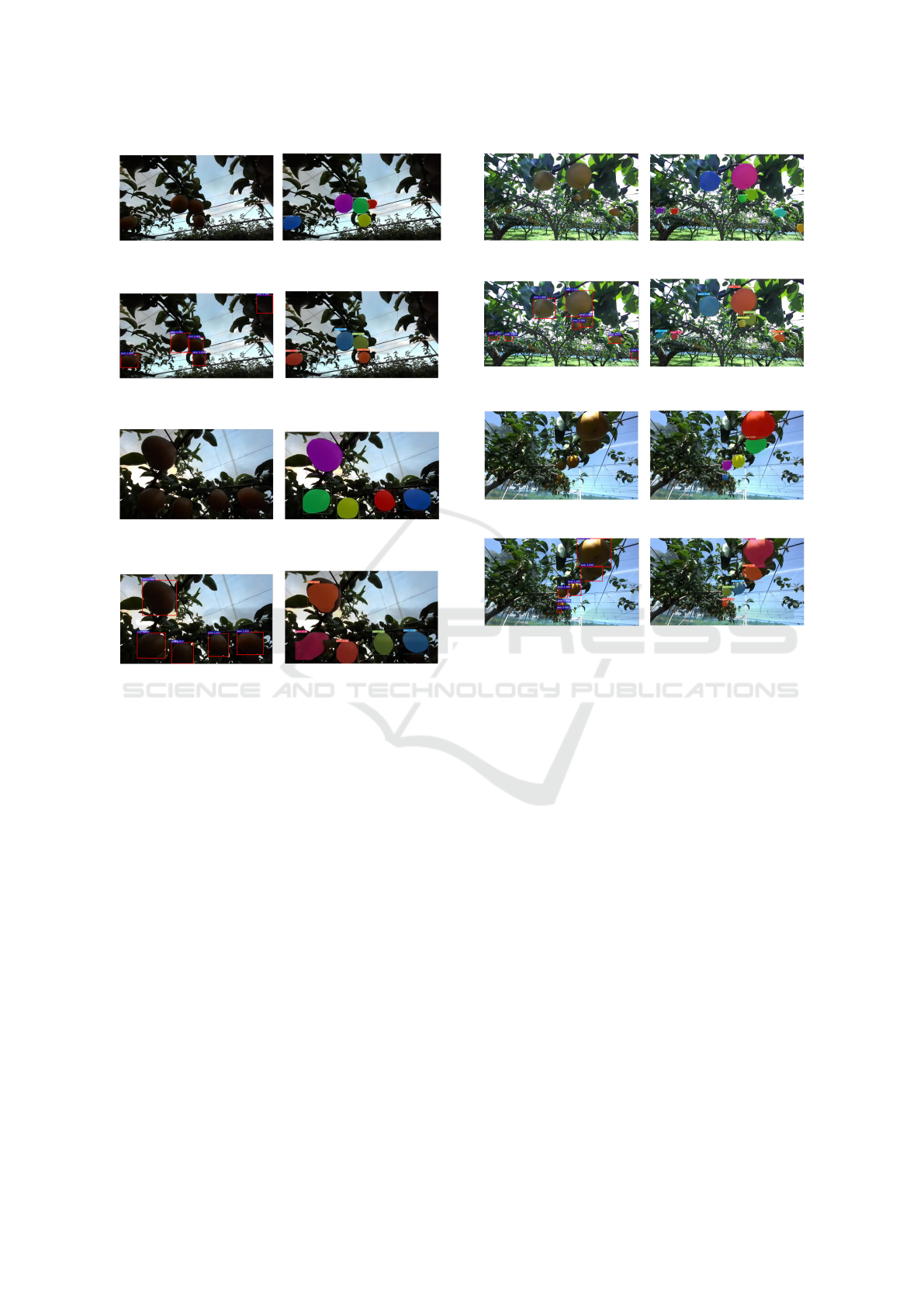
Figure 7: Results in low light situation.(a-d):Aggregating
pears,(e-h)Separating pears.
and a corresponding test set mAP of 87.52% . Mean-
while, YOLACT, despite being an instance segmenta-
tion algorithm akin to Mask R-CNN, achieved a val-
idation set mAP of 87.07% and a commendable test
set mAP of 97.89%.
This study categorized conditions into two distinct
factors: light intensity and pear aggregation. Both
Mask R-CNN and YOLACT generated masks and
bounding boxes, whereas Faster R-CNN exclusively
generated bounding boxes.
Regarding light intensity, it was divided into high
and low light. Mask R-CNN outperformed Faster R-
CNN and YOLACT in generating bounding boxes
under various light conditions. For mask gener-
ation, although both Mask R-CNN and YOLACT
were instance segmentation algorithms, Mask R-
CNN, which was two-stage method was notably su-
perior to YOLACT, and YOLACT encountered sit-
uations where the mask area exceeds the predicted
bounding box or the predicted bounding box area is
smaller than that of the pears.
(a) Original image (b) Mask R-CNN
(c) Faster R-CNN (d) YOLACT
(e) Original image (f) Mask R-CNN
(g) Faster R-CNN (h) YOLACT
Figure 8: Results in high light situation.(a-d):Aggregating
pears,(e-h)Separating pears.
In terms of aggregation of pears, it was catego-
rized into separating pears and aggregating pears. In
separating pears, Mask R-CNN accurately recognized
pears in different light intensity, while Faster R-CNN
generated the missing bounding boxes, and YOLACT
exhibited errors in mask area and boxes generation.
In aggregating pears, Mask R-CNN outperformed ac-
curately in generating bounding boxes and masks.
However, Faster R-CNN misidentified some leaves as
pears under low light conditions, while YOLACT not
only misidentified but also generated unstable masks.
3.4 Estimation of Pear Positioning
Using Mask R-CNN
This paper contrasted the performance of the same
dataset using three deep learning algorithms. Mask
R-CNN excelled in producing bounding boxes with
higher accuracy. Therefore, we intended to calculate
the distance from the already recognized pears to the
left lens of camera using mask R-CNN and compared
errors of the distance measurement in different cases.
Recognition and Position Estimation of Pears in Complex Orchards Using Stereo Camera and Deep Learning Algorithm
637

(a) (b)
(c) (d)
(e) (f)
(g) (h)
Figure 9: Results of separating pears distance measurement
in low and high light.
The fact that ZED2 cameras only identified and
distance measure information between the two lens
when they were matched.This paper found that within
0.1m-0.5m,due to the random of pear growth, dif-
ferent conditions of pears showed different errors
in distance measurement. In this paper, we es-
timated the distance error from the left lens to
the pears with different situations (separating and
aggregating).(Figure.9) (Figure.10). Moreover, we
compared the error means of measured distance and
true distance ¯x
n
, standard deviations σ
n
and the good-
ness of fit R
2
between measured values and true val-
ues of separating and aggregating pears under low and
high light. These metrics were used to evaluate the ac-
curacy of the distance measurements by ZED2 stereo
camera (Table.4).
In the range of 0.1-0.5m, the incomplete data of
bounding boxes and masks resulting from recognition
errors were rounded off. The total ¯x
n
for separating
pears was 0.017m, while for aggregating pears, which
involved multiple identified targets, it was slightly
less accurate with ¯x
n
of 0.018m in generating bound-
ing boxes and masks. The standard deviation was
used to estimate the degree of dispersion of the mea-
(a) (b)
(c) (d)
(e) (f)
(g) (h)
Figure 10: Results of aggregating pears distance measure-
ment in low and high light.
surement errors. For separated pears, the total σ
n
was
0.015m, indicating a relatively stable error in measur-
ing them. The camera measured aggregating pears
significantly higher, with a value of 0.021m, suggest-
ing that the degree of pear aggregation affected the
measurement errors. The R
2
was used to evaluate
how closely the measured distances of pears aligned
with the true values under different conditions. For
separating pears, the R
2
reached 0.896, indicating a
tendency for the measured and true values to be sim-
ilar. However, for aggregating pears, after discarding
some larger errors associated with bounding boxes
and mask generation, the R
2
reached to 0.832, sug-
gesting a lower level of agreement with the true val-
ues.
The results also demonstrated that pears along the
edge of the camera exhibited significant errors; This
study discarded samples which have significant errors
in measuring when calculating the R
2
. This was due
to the inherent distortion of the ZED2 stereo cam-
era, the incomplete bounding boxes, and the result-
ing masks of Mask R-CNN, where pears immediately
adjacent to the camera showed completely incorrect
measurements when measured by the ZED2 camera.
ICINCO 2023 - 20th International Conference on Informatics in Control, Automation and Robotics
638

Table 4: The distance errors estimation of recognised pears in different situations.
Pear condition Separating pears Aggregating pears
Light condition Low High Overall Low High Overall
¯x
n
(m) 0.013 0.020 0.017 0.012 0.023 0.018
σ
n
(m) 0.016 0.013 0.015 0.011 0.028 0.021
R
2
0.834 0.884 0.896 0.848 0.812 0.832
4 CONCLUSIONS
In this paper, we proposed a method to achieve ac-
curate recognition and position estimation in com-
plex orchard environments to reduce the grasping er-
rors caused by problems such as branch occlusion and
pear aggregation, which improved the robustness of
robots working in the complex orchard. Also, we
compared the performance of different deep learning
algorithms for the recognition of separating and ag-
gregating pears under different light intensities. The
results showed that Mask R-CNN outperforms Faster
R-CNN and YOLACT in terms of recognition accu-
racy for separating and aggregating pears under both
high and low light conditions. In further experiments,
we chose Mask R-CNN as the recognition algorithm
for pear position estimation and compared the error
mean ¯x
n
, standard deviation σ
n
, and goodness-of-fit
R
2
of separating and aggregating pears at a distance
of 0.1-0.5 m. The results showed that ¯x and σ
n
were
significantly higher for aggregated pears than for sep-
arated pears in the same cases, and R
2
reached more
than 0.8 in different cases. Therefore, this paper ex-
hibited commendable efficacy in the precise recogni-
tion and position of pears within the range of 0.1-0.5
meters. This outcome substantially bolsters the pre-
cise recognition and position estimation of pears by
agricultural fruit-picking robots.
ACKNOWLEDGEMENTS
The authors would like to thank the Tsukuba Plant
Innovation Research Center (T-PIRC), University of
Tsukuba, for providing facilities for conducting this
research in its orchards.Also,This work was supported
by JST SPRING, Grant Number JPMJS2124.
REFERENCES
Bargoti, S. and Underwood, J. (2017). Deep fruit detec-
tion in orchards. In 2017 IEEE international confer-
ence on robotics and automation (ICRA), pages 3626–
3633. IEEE.
Bechar, A. and Vigneault, C. (2016). Agricultural robots for
field operations: Concepts and components. Biosys-
tems Engineering, 149:94–111.
Bolya, D., Zhou, C., Xiao, F., and Lee, Y. J. (2019). Yolact:
Real-time instance segmentation. In Proceedings of
the IEEE/CVF international conference on computer
vision, pages 9157–9166.
Condotta, I. C., Brown-Brandl, T. M., Pitla, S. K., Stinn,
J. P., and Silva-Miranda, K. O. (2020). Evalua-
tion of low-cost depth cameras for agricultural appli-
cations. Computers and Electronics in Agriculture,
173:105394.
Girshick, R. (2015). Fast r-cnn. In Proceedings of the IEEE
international conference on computer vision, pages
1440–1448.
Girshick, R., Donahue, J., Darrell, T., and Malik, J. (2015).
Region-based convolutional networks for accurate ob-
ject detection and segmentation. IEEE transactions on
pattern analysis and machine intelligence, 38(1):142–
158.
He, K., Gkioxari, G., Doll
´
ar, P., and Girshick, R. (2017).
Mask r-cnn. In Proceedings of the IEEE international
conference on computer vision, pages 2961–2969.
Kirkland, E. J. and Kirkland, E. J. (2010). Bilinear interpo-
lation. Advanced Computing in Electron Microscopy,
pages 261–263.
Koirala, A., Walsh, K. B., Wang, Z., and McCarthy, C.
(2019). Deep learning–method overview and review
of use for fruit detection and yield estimation. Com-
puters and electronics in agriculture, 162:219–234.
Ortiz, L. E., Cabrera, E. V., and Gonc¸alves, L. M. (2018).
Depth data error modeling of the zed 3d vision sensor
from stereolabs. ELCVIA: electronic letters on com-
puter vision and image analysis, 17(1):0001–15.
Sa, I., Ge, Z., Dayoub, F., Upcroft, B., Perez, T., and Mc-
Cool, C. (2016). Deepfruits: A fruit detection system
using deep neural networks. sensors, 16(8):1222.
Saito, T. (2016). Advances in japanese pear breeding in
japan. Breeding Science, 66(1):46–59.
Tran, T. M., Ta, K. D., Hoang, M., Nguyen, T. V., Nguyen,
N. D., and Pham, G. N. (2020). A study on determina-
tion of simple objects volume using zed stereo camera
based on 3d-points and segmentation images. Inter-
national Journal, 8(5).
Zhang, Y.-D., Dong, Z., Chen, X., Jia, W., Du, S., Muham-
mad, K., and Wang, S.-H. (2019). Image based fruit
category classification by 13-layer deep convolutional
neural network and data augmentation. Multimedia
Tools and Applications, 78:3613–3632.
Recognition and Position Estimation of Pears in Complex Orchards Using Stereo Camera and Deep Learning Algorithm
639
